KR20190100542A - 로봇 청소기 및 그 제어 방법 - Google Patents
로봇 청소기 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20190100542A KR20190100542A KR1020180016511A KR20180016511A KR20190100542A KR 20190100542 A KR20190100542 A KR 20190100542A KR 1020180016511 A KR1020180016511 A KR 1020180016511A KR 20180016511 A KR20180016511 A KR 20180016511A KR 20190100542 A KR20190100542 A KR 20190100542A
- Authority
- KR
- South Korea
- Prior art keywords
- obstacle
- robot cleaner
- main body
- cleaning
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0461—Dust-loosening tools, e.g. agitators, brushes
- A47L9/0466—Rotating tools
- A47L9/0477—Rolls
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2852—Elements for displacement of the vacuum cleaner or the accessories therefor, e.g. wheels, casters or nozzles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/2826—Parameters or conditions being sensed the condition of the floor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2868—Arrangements for power supply of vacuum cleaners or the accessories thereof
- A47L9/2884—Details of arrangements of batteries or their installation
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2894—Details related to signal transmission in suction cleaners
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
- B25J9/1666—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/4155—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by program execution, i.e. part program or machine function execution, e.g. selection of a program
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45098—Vacuum cleaning robot
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Manufacturing & Machinery (AREA)
- Human Computer Interaction (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Description
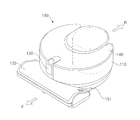
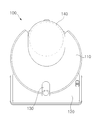
도 2는, 도 1의 로봇 청소기의 평면도이다.
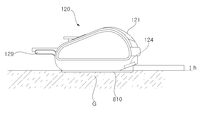
도 3은, 도 1의 로봇 청소기의 측면도이다.
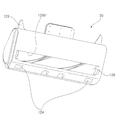
도 4는, 도 1의 청소부의 측면도이다.
도 5는, 도 1의 청소부의 저부를 보인 도면이다.
도 6은, 도 1의 로봇 청소기의 제어 블록도이다.
도 7은, 본 발명의 실시예에 따른 로봇 청소기의 제어 방법을 도시한 순서도이다.
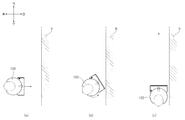
도 8은, 도 7의 제1 접촉 상태를 설명하기 위한 참조 도면이다.
도 9는, 도 7의 연결 동작을 설명하기 위한 참조 도면이다.
도 10은, 도 7의 연결 동작을 설명하기 위한 참조 도면이다.
도 11은, 도 7의 제1 영역 및 제2 영역의 설명에 참조되는 도면이다.
도 12는, 도 7의 제1 영역 및 제2 영역의 설명에 참조되는 도면이다.
도 13은, 도 7의 제1 영역 및 제2 영역의 설명에 참조되는 도면이다.
도 14는, 본 발명의 실시예에 따른 로봇 청소기의 제어 방법을 도시한 순서도이다.
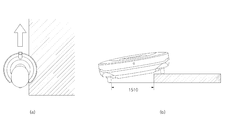
도 15는, 도 14의 제어 방법의 설명에 참조되는 도면이다.
도 16는, 종래 로봇 청소기의 장애물 경계 청소를 설명하기 위한 참조도면이다.
120: 청소부
130: 센싱부
150: 구동부
181: 제어부
185: 메모리
810: 제1 영역
830: 제2 영역
Claims (15)
- 본체;
상기 본체를 이동시키는 구동부;
상기 본체의 전방에 배치되어 청소를 수행하는 청소부;
본체 주변의 장애물을 감지하는 센싱부; 및
상기 센싱부가 상기 장애물을 감지한 경우, 상기 구동부를 제어하여, 상기 청소부의 전단이 상기 장애물에 접촉하여 제1 영역을 청소하는 제1 접촉 상태가 되도록 상기 본체를 전진 이동 시키고, 상기 제1 접촉 상태 후, 소정의 연결 동작에 따라 상기 전단이 상기 장애물에 접촉하여 제2 영역을 청소하는 제2 접촉 상태가 되도록 상기 본체를 이동 시키되, 상기 제1 영역 및 상기 제2 영역이 상기 장애물의 외곽을 따라 배열되도록 제어하는 제어부;를 포함하는 것을 특징으로 하는 로봇 청소기. - 제1항에 있어서,
상기 제어부는,
상기 제1 영역 및 상기 제2 영역이, 서로 일부가 중첩되거나, 서로 연결되도록 제어하는 것을 특징으로 하는 로봇 청소기. - 제1항에 있어서,
상기 연결 동작은,
상기 청소부의 전단이 상기 장애물에서 멀어지도록 상기 본체를 후진 이동 및 상기 청소부의 전단이 상기 장애물에 접촉하도록 상기 본체를 전진 이동 하는 것을 특징으로 하는 로봇 청소기. - 제3항에 있어서,
상기 제어부는,
상기 후진 이동시, 상기 구동부를 제어하여, 상기 본체를 미청소 영역이 존재하는 방향으로 후진 이동 시키고, 상기 전진 이동시, 상기 청소부의 전단이 상기 장애물에 다시 접촉되는 제2 접촉 상태가 되도록 상기 본체를 전진 이동 시키는 것을 특징으로 하는 로봇 청소기. - 제3항에 있어서,
상기 제어부는,
상기 본체의 제자리 회전시의 회전 중심과 상기 로봇 청소기의 최외곽선 사이의 최대 거리 보다, 상기 회전 중심으로부터 상기 장애물까지의 거리가 더 크도록, 상기 본체를 후진 이동 시키는 것을 특징으로 하는 로봇 청소기. - 제1항에 있어서,
상기 제1 영역 및 상기 제2 영역은 각각,
상기 청소부가 상기 장애물에 접촉했을 때, 상기 청소부가 점유하는 영역인 것을 특징으로 하는 로봇 청소기. - 제1항에 있어서,
상기 센싱부는,
상기 장애물의 높이와 관련된 높이 정보를 감지하고,
상기 제어부는,
상기 높이 정보를 기초로, 상기 장애물의 높이가 소정 높이 이하일 때, 상기 구동부를 제어하여, 상기 본체가 상기 연결 동작을 수행하도록 제어하는 것을 특징으로 하는 로봇 청소기. - 제1항에 있어서,
상기 센싱부는,
상기 연결 동작 수행 중, 상기 장애물의 위치 정보를 감지하고,
상기 제어부는,
상기 위치 정보를 기초로, 청소 영역에 대한 청소 맵을 작성하는 것을 특징으로 하는 로봇 청소기. - 제8항에 있어서,
상기 청소 맵을 저장하는 메모리;를 더 포함하고,
상기 제어부는,
상기 청소 맵을 기초로, 상기 장애물에 다시 접근하여, 상기 장애물의 외곽을 따라 상기 본체가 이동하도록 상기 구동부를 제어하는 것을 특징으로 하는 로봇 청소기. - 로봇 청소기가, 로봇 청소기 주변의 장애물을 감지하는 단계;
상기 로봇 청소기가, 상기 장애물을 감지한 경우, 상기 로봇 청소기의 흡입구 전단이 상기 장애물에 접촉하여 제1 영역을 청소하는 제1 접촉 상태가 되도록 전진 이동하는 단계;
상기 로봇 청소기가, 상기 제1 접촉 상태 후, 소정의 연결 동작을 수행하는 단계;
상기 로봇 청소기가, 상기 소정의 연결 동작에 따라, 상기 흡입구 전단이 상기 장애물에 접촉하여, 상기 제1 영역과 서로 일부가 중첩되거나 서로 연결된, 제2 영역을 청소하는 제2 접촉 상태가 되도록 전진 이동하는 단계;를 포함하는 것을 특징으로 하는 로봇 청소기의 제어 방법. - 제10항에 있어서,
상기 연결 동작을 수행하는 단계는,
상기 로봇 청소기의 흡입구 전단이 상기 장애물에서 멀어지도록 후진 이동 및 상기 로봇 청소기의 흡입구 전단이 상기 장애물에 접촉하도록 전진 이동하는 것을 특징으로 하는 로봇 청소기의 제어 방법. - 제11항에 있어서,
상기 연결 동작을 수행하는 단계는,
상기 로봇 청소기의 후진 이동 시, 미청소 영역이 존재하는 방향으로 후진 이동하는 것을 특징으로 하는 로봇 청소기의 제어 방법. - 제10항에 있어서,
상기 로봇 청소기 주변의 장애물을 감지하는 단계는,
상기 로봇 청소기가, 상기 장애물의 높이와 관련된 높이 정보를 감지하며,
상기 연결 동작을 수행하는 단계는,
상기 높이 정보를 기초로, 상기 장애물의 높이가 소정 높이 이하일 때, 수행되는 것을 특징으로 하는 로봇 청소기의 제어 방법. - 제10항에 있어서,
상기 로봇 청소기가 상기 장애물의 위치를 감지하고, 상기 장애물의 위치 정보를 기초로, 청소 영역에 대한 청소 맵을 작성하는 단계;를 더 포함하는 것을 특징으로 하는 로봇 청소기의 제어 방법. - 제14항에 있어서,
상기 로봇 청소기가, 상기 청소 맵을 기초로, 상기 장애물에 다시 접근하여, 상기 장애물의 외곽을 따라 이동하는 단계;를 더 포함하는 것을 특징으로 하는 로봇 청소기의 제어 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180016511A KR102070066B1 (ko) | 2018-02-09 | 2018-02-09 | 로봇 청소기 및 그 제어 방법 |
| US16/270,726 US11297992B2 (en) | 2018-02-09 | 2019-02-08 | Robot cleaner and method for controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180016511A KR102070066B1 (ko) | 2018-02-09 | 2018-02-09 | 로봇 청소기 및 그 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190100542A true KR20190100542A (ko) | 2019-08-29 |
| KR102070066B1 KR102070066B1 (ko) | 2020-01-28 |
Family
ID=67540996
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180016511A Active KR102070066B1 (ko) | 2018-02-09 | 2018-02-09 | 로봇 청소기 및 그 제어 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11297992B2 (ko) |
| KR (1) | KR102070066B1 (ko) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD943227S1 (en) * | 2019-08-28 | 2022-02-08 | Lg Electronics Inc. | Robotic vacuum cleaner |
| USD938677S1 (en) * | 2019-08-28 | 2021-12-14 | Lg Electronics Inc. | Robotic vacuum cleaner |
| USD935711S1 (en) * | 2019-08-28 | 2021-11-09 | Lg Electronics Inc. | Robotic vacuum cleaner |
| USD947474S1 (en) * | 2019-08-28 | 2022-03-29 | Lg Electronics Inc. | Robotic vacuum cleaner |
| DE102020132203A1 (de) * | 2020-12-03 | 2022-06-09 | Vorwerk & Co. Interholding Gesellschaft mit beschränkter Haftung | Sich selbsttätig fortbewegendes Bodenbearbeitungsgerät mit einer Mehrzahl von Absturzsensoren |
| CN113455962B (zh) * | 2021-07-12 | 2023-04-07 | 北京顺造科技有限公司 | 一种自主清洁设备的行进控制方法、设备、系统及介质 |
| JP7747885B2 (ja) * | 2021-10-18 | 2025-10-01 | 北京石頭創新科技有限公司 | 清掃装置の制御方法、装置、清掃装置および記憶媒体 |
| CN116548873B (zh) * | 2022-01-28 | 2025-09-16 | 追觅创新科技(苏州)有限公司 | 地图处理方法、系统及自移动设备 |
| CN116700236A (zh) * | 2022-02-28 | 2023-09-05 | 追觅创新科技(苏州)有限公司 | 自移动设备的地图生成方法、自移动设备及存储介质 |
| CN114652240B (zh) * | 2022-03-02 | 2024-03-19 | 深圳市杉川机器人有限公司 | 清洁单元的拆卸系统、基站以及清洁单元的拆卸方法 |
| CN118716942A (zh) * | 2024-08-01 | 2024-10-01 | 北京石头创新科技有限公司 | 清洁设备控制方法、装置以及清洁设备 |
| CN118948152A (zh) * | 2024-09-05 | 2024-11-15 | 北京石头创新科技有限公司 | 清洁机器人的控制方法及装置、介质及电子设备 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0546246A (ja) * | 1991-08-10 | 1993-02-26 | Nec Home Electron Ltd | 掃除ロボツト及びその走行方法 |
| JP5891736B2 (ja) * | 2011-11-22 | 2016-03-23 | 三菱電機株式会社 | 自走式掃除機 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5891736A (ja) | 1981-11-09 | 1983-05-31 | Sumitomo Chem Co Ltd | 充填剤の顆粒化方法 |
| EP4223200B1 (en) * | 2014-07-01 | 2024-10-09 | Samsung Electronics Co., Ltd. | Cleaning robot and controlling method thereof |
| KR102328252B1 (ko) * | 2015-02-13 | 2021-11-19 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
-
2018
- 2018-02-09 KR KR1020180016511A patent/KR102070066B1/ko active Active
-
2019
- 2019-02-08 US US16/270,726 patent/US11297992B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0546246A (ja) * | 1991-08-10 | 1993-02-26 | Nec Home Electron Ltd | 掃除ロボツト及びその走行方法 |
| JP5891736B2 (ja) * | 2011-11-22 | 2016-03-23 | 三菱電機株式会社 | 自走式掃除機 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190246857A1 (en) | 2019-08-15 |
| KR102070066B1 (ko) | 2020-01-28 |
| US11297992B2 (en) | 2022-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102070066B1 (ko) | 로봇 청소기 및 그 제어 방법 | |
| JP6891289B2 (ja) | 掃除機及びその制御方法 | |
| US11537135B2 (en) | Moving robot and controlling method for the moving robot | |
| US9474427B2 (en) | Robot cleaner and method for controlling the same | |
| KR102426578B1 (ko) | 로봇청소기 및 그 제어방법 | |
| KR102070065B1 (ko) | 싸이클론 집진 장치 및 이를 포함하는 청소기 | |
| CN112055553B (zh) | 清扫机及其控制方法 | |
| CN111315275A (zh) | 机器人清洁器及其控制方法 | |
| KR102115194B1 (ko) | 로봇 청소기 및 그 제어방법 | |
| EP3795051B1 (en) | Cleaner and method for controlling same | |
| EP3788927B1 (en) | A vacuum cleaner performing autonomous driving | |
| KR102431982B1 (ko) | 복수의 로봇 청소기 및 그 제어 방법 | |
| KR20190119222A (ko) | 로봇 청소기 | |
| KR20230014790A (ko) | 로봇 청소기 및 그 제어 방법 | |
| KR102355630B1 (ko) | 로봇 청소기 및 그 제어 방법 | |
| KR20200037200A (ko) | 복수의 로봇 청소기 및 그 제어방법 | |
| KR20220058528A (ko) | 로봇 청소기 및 제어방법 | |
| KR20200013177A (ko) | 복수의 로봇 청소기 및 그 제어방법 | |
| KR102115193B1 (ko) | 로봇 청소기 및 그 동작방법 | |
| KR20240042269A (ko) | 도킹 스테이션을 포함하는 로봇 청소기 시스템 및 로봇 청소기의 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| FPAY | Annual fee payment |
Payment date: 20221209 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| L13 | Limitation or reissue of ip right requested |
Free format text: ST27 STATUS EVENT CODE: A-2-3-L10-L13-LIM-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| L13-X000 | Limitation or reissue of ip right requested |
St.27 status event code: A-2-3-L10-L13-lim-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 7 |