KR20200023801A - 이동 플랫폼의 궤도 - Google Patents
이동 플랫폼의 궤도 Download PDFInfo
- Publication number
- KR20200023801A KR20200023801A KR1020180100185A KR20180100185A KR20200023801A KR 20200023801 A KR20200023801 A KR 20200023801A KR 1020180100185 A KR1020180100185 A KR 1020180100185A KR 20180100185 A KR20180100185 A KR 20180100185A KR 20200023801 A KR20200023801 A KR 20200023801A
- Authority
- KR
- South Korea
- Prior art keywords
- track
- mobile platform
- module
- modules
- track module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/18—Tracks
- B62D55/20—Tracks of articulated type, e.g. chains
- B62D55/205—Connections between track links
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/18—Tracks
- B62D55/24—Tracks of continuously flexible type, e.g. rubber belts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2304/00—Optimising design; Manufacturing; Testing
- B60Y2304/03—Reducing weight
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Toys (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
Description
도 2는 본 발명의 일 실시예에 따른 이동 플랫폼의 궤도의 일 모듈의 구성을 도시한 도면이다.
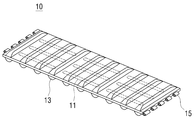
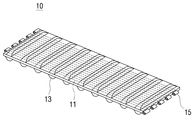
도 3은 본 발명의 일 실시예에 따른 이동 플랫폼의 궤도의 궤도 모듈의 구성을 도시한 도면이다.
도 4는 궤도 모듈의 일 구성인 인서트 코드의 일 예를 도시한 도면이다.
도 5는 궤도 모듈의 일 구성인 인서트 코드의 일 예를 도시한 도면이다.
도 6은 인접한 궤도 모듈을 체결하는 구성을 도시한 도면이다.
10, 10A, 10B, 10C, 10D, 10E : 궤도 모듈
11 : 인서트 코드
13 : 탄성부
15, 15A, 15B : 관절부
17 : 연결축
19A, 19B : 이탈 방지부
Claims (6)
- 복수의 궤도 모듈을 포함하는 이동 플랫폼의 궤도에 있어서,
상기 복수의 궤도 모듈 각각은,
인서트 코드; 및
상기 인서트 코드가 삽입되는 탄성부를 포함하고,
상기 복수의 궤도 모듈 각각은 서로 인접한 궤도 모듈간 체결되어 연결되는 이동 플랫폼의 궤도. - 제1항에 있어서,
상기 서로 인접한 궤도 모듈이 체결되도록 형성된 관절부를 더 포함하는 이동 플랫폼의 궤도. - 제2항에 있어서,
상기 관절부는 상기 복수의 궤도 모듈의 양 끝단에 각각 형성되는 이동 플랫폼의 궤도. - 제2항에 있어서,
상기 관절부를 통해 체결된 인접한 궤도 모듈을 고정시키는 연결축을 더 포함하는 이동 플랫폼의 궤도. - 제4항에 있어서,
상기 연결축은 상기 인접한 궤도 모듈 각각에 형성된 관절부가 체결되어 공동으로 형성한 내부홀을 관통하여 상기 인접한 궤도 모듈을 고정시키는 이동 플랫폼의 궤도. - 제5항에 있어서,
상기 연결축의 이탈을 방지하는 이탈 방지부를 더 포함하는 이동 플랫폼의 궤도.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180100185A KR102175488B1 (ko) | 2018-08-27 | 2018-08-27 | 이동 플랫폼의 궤도 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180100185A KR102175488B1 (ko) | 2018-08-27 | 2018-08-27 | 이동 플랫폼의 궤도 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200023801A true KR20200023801A (ko) | 2020-03-06 |
| KR102175488B1 KR102175488B1 (ko) | 2020-11-06 |
Family
ID=69802626
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180100185A Active KR102175488B1 (ko) | 2018-08-27 | 2018-08-27 | 이동 플랫폼의 궤도 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102175488B1 (ko) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6023512Y2 (ja) * | 1978-11-30 | 1985-07-12 | 株式会社小松製作所 | 始動補助装置 |
| JPH03130780U (ko) * | 1990-04-16 | 1991-12-27 | ||
| JPH09136677A (ja) * | 1995-11-14 | 1997-05-27 | Mitsubishi Heavy Ind Ltd | ゴム履帯 |
-
2018
- 2018-08-27 KR KR1020180100185A patent/KR102175488B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6023512Y2 (ja) * | 1978-11-30 | 1985-07-12 | 株式会社小松製作所 | 始動補助装置 |
| JPH03130780U (ko) * | 1990-04-16 | 1991-12-27 | ||
| JPH09136677A (ja) * | 1995-11-14 | 1997-05-27 | Mitsubishi Heavy Ind Ltd | ゴム履帯 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102175488B1 (ko) | 2020-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6896125B2 (en) | Belt attachment device and method | |
| EP3335939B1 (en) | Roof box mounting apparatus for vehicle | |
| US8658073B2 (en) | Crawler belt, crawler unit and method for manufacturing crawler belt | |
| JP5427771B2 (ja) | 飛行機の揚力部材を胴体に固定する装置 | |
| US20110148189A1 (en) | Reinforced stud mount | |
| US5362142A (en) | Combination linkage type rubber crawler | |
| US5593218A (en) | Highly elastic rubber crawler | |
| DE19833154C2 (de) | Gleiskettenfahrzeug | |
| MX2007009687A (es) | Sistema de ascensor con una correa, correa para tal sistema de ascensores, procedimiento para la produccion de tal correa, conjunto formado por esas correas, así como procedimiento para montar el conjunto en un sistema de ascensores. | |
| US9908709B2 (en) | Belt attachment and system | |
| KR20200023801A (ko) | 이동 플랫폼의 궤도 | |
| US20190202510A1 (en) | Support device for a tracked vehicle; conversion kit for a tracked vehicle and tracked vehicle comprising said support device | |
| EP1431176B1 (en) | Flexbeam for helicopter rotor | |
| EP1798138B1 (en) | Mounting structure of an endless track carrier roller | |
| KR20070112852A (ko) | 부재 결합용 기구 및 어셈블리 | |
| KR100592846B1 (ko) | 전차의 분리형 고무트랙 | |
| KR100362739B1 (ko) | 액정표시장치용 패널 장착 및 탈착용 더블암 타입 로봇에사용되는 복합재료 손목블록 및 이것이 결합된 더블암타입 로봇 | |
| CN216545819U (zh) | 拼装式电池转运设备及换电站 | |
| CN222675009U (zh) | 一种薏米整株收割机的传送履带机构 | |
| KR20200124401A (ko) | 차량용 궤도 | |
| JP7491455B1 (ja) | マンコンベヤ | |
| KR20210047615A (ko) | 차량 루프박스 설치 구조 | |
| CN222203012U (zh) | 一种手拉器 | |
| KR20180092393A (ko) | 차량용 궤도 | |
| JP7182436B2 (ja) | クローラ走行装置用ガイド及びそれを用いたクローラ走行装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180827 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20190906 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20200325 Patent event code: PE09021S02D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20201026 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20201102 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20201103 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20231030 Start annual number: 4 End annual number: 4 |