KR20200041390A - 유해 물질을 포함하는 탱크 내에서 작업을 수행하기 위한 방법 - Google Patents
유해 물질을 포함하는 탱크 내에서 작업을 수행하기 위한 방법 Download PDFInfo
- Publication number
- KR20200041390A KR20200041390A KR1020207010339A KR20207010339A KR20200041390A KR 20200041390 A KR20200041390 A KR 20200041390A KR 1020207010339 A KR1020207010339 A KR 1020207010339A KR 20207010339 A KR20207010339 A KR 20207010339A KR 20200041390 A KR20200041390 A KR 20200041390A
- Authority
- KR
- South Korea
- Prior art keywords
- mobile platform
- tank
- enclosure
- intrinsically safe
- platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/225—Supports, positioning or alignment in moving situation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/18—Water
- G01N33/1886—Water using probes, e.g. submersible probes, buoys
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0033—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by determining damage, crack or wear
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0066—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by exciting or detecting vibration or acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0075—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by means of external apparatus, e.g. test benches or portable test systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0091—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by using electromagnetic excitation or detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9515—Objects of complex shape, e.g. examined with use of a surface follower device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/954—Inspecting the inner surface of hollow bodies, e.g. bores
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/26—Arrangements for orientation or scanning by relative movement of the head and the sensor
- G01N29/262—Arrangements for orientation or scanning by relative movement of the head and the sensor by electronic orientation or focusing, e.g. with phased arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/26—Arrangements for orientation or scanning by relative movement of the head and the sensor
- G01N29/265—Arrangements for orientation or scanning by relative movement of the head and the sensor by moving the sensor relative to a stationary material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0094—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots involving pointing a payload, e.g. camera, weapon, sensor, towards a fixed or moving target
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9515—Objects of complex shape, e.g. examined with use of a surface follower device
- G01N2021/9518—Objects of complex shape, e.g. examined with use of a surface follower device using a surface follower, e.g. robot
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/954—Inspecting the inner surface of hollow bodies, e.g. bores
- G01N2021/9542—Inspecting the inner surface of hollow bodies, e.g. bores using a probe
- G01N2021/9544—Inspecting the inner surface of hollow bodies, e.g. bores using a probe with emitter and receiver on the probe
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/04—Wave modes and trajectories
- G01N2291/044—Internal reflections (echoes), e.g. on walls or defects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/26—Scanned objects
- G01N2291/263—Surfaces
- G01N2291/2636—Surfaces cylindrical from inside
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/26—Scanned objects
- G01N2291/269—Various geometry objects
- G01N2291/2695—Bottles, containers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2476—Non-optical details, e.g. housings, mountings, supports
- G02B23/2492—Arrangements for use in a hostile environment, e.g. a very hot, cold or radioactive environment
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Pathology (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Electromagnetism (AREA)
- Robotics (AREA)
- Medicinal Chemistry (AREA)
- Food Science & Technology (AREA)
- Filling Or Discharging Of Gas Storage Vessels (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
- Astronomy & Astrophysics (AREA)
- Optics & Photonics (AREA)
- Geophysics And Detection Of Objects (AREA)
- Ship Loading And Unloading (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
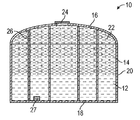
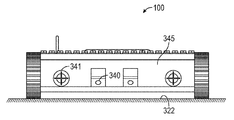
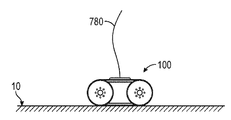
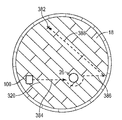
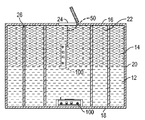
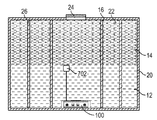
도 1은 본 발명에 따른 이동식 플랫폼을 사용함으로써 검사될 수 있는 탱크를 단면도로 도시한다.
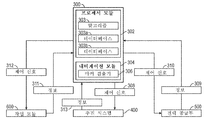
도 2는 본 발명에 따른 이동식 플랫폼의 일 실시예의 기능 블록도이다.
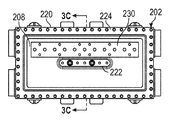
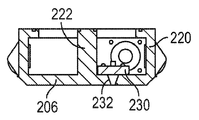
도 3a 내지 도 3c는 본 발명에 따른 이동식 플랫폼을 위한 인클로저의 일 실시예를 도시한다.
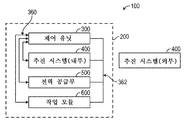
도 4는 본 발명의 일 실시예에 따른, 이동식 플랫폼을 위한 제어 유닛 및 소정의 관련 요소의 기능 블록도이다.
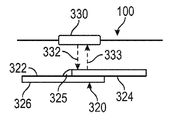
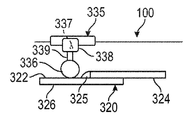
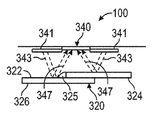
도 5a 내지 도 5e는 본 발명에 따른, 마커를 검출하는 마커 검출기의 실시예를 도시한다.
도 6a는 본 발명의 일 실시예에 따른, 이동식 플랫폼을 제어하기 위한 예시적인 방법을 예시하는 흐름도이다.
도 6b는 본 발명의 일 실시예에 따른, 이동식 플랫폼에 의해 검출되는 불연속부를 갖는 탱크의 저부 벽을 도시한다.
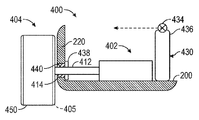
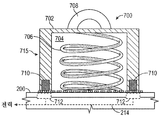
도 7은 가압된 내부를 사용하는 본 발명의 일 실시예에 따른 추진 시스템을 개략적으로 도시한다.
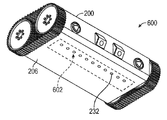
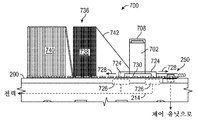
도 8은 본 발명의 일 실시예에 따른 전력 공급부를 등각도로 도시한다.
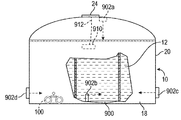
도 9a 및 도 9b는 본 발명의 일 실시예에 따른, 센서가 적응된 작업 모듈을 개략적으로 도시한다.
도 10은 본 발명의 일 실시예에 따른 스위치 조립체를 개략적으로 도시한다.
도 11a 및 도 11b는 본 발명의 실시예에 따른 회수 모듈을 개략적으로 도시한다.
도 11c 및 도 11d는 본 발명의 실시예에 따른, 이동식 플랫폼의 배치 및/또는 회수를 용이하게 하기 위해 사용될 수 있는 장치를 개략적으로 도시한다.
도 12a 및 도 12b는 본 발명에 따른 이동식 플랫폼의 다른 실시예를 등각도로 도시한다.
도 13은 본 발명의 일 실시예에 따른, 플랫폼을 위한 다른 제어 유닛의 기능 블록도이다.
도 14는 본 발명의 일 실시예에 따른, 탱크의 저부 벽 - 그를 따라서 도 13의 실시예가 이동식 플랫폼을 조향함 - 을 도시한다.
도 15는 본 발명의 일 실시예에 따른, 작업을 수행하기 위해 이동식 플랫폼을 사용하기 위한 예시적인 방법을 예시하는 흐름도이다.
도 16a 및 도 16b는 본 발명의 실시예에 따른, 도 15의 방법의 수행 동안 이동식 플랫폼의 배치, 해제, 및 회수를 단면도로 도시한다.
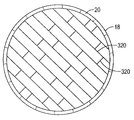
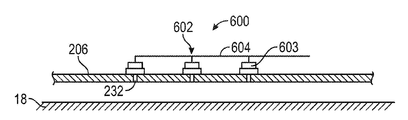
도 17은 본 발명의 실시예에 따른, 능동형 마커를 갖는 탱크의 부분 단면도이다.
도 18a 및 도 18b는 본 발명에 따른, 이동식 플랫폼을 조향하기 위한 대안적인 방법을 예시하는 흐름도이다.
Claims (12)
- 에너지 물질(12, 14)로 적어도 부분적으로 충전된 탱크(10) 내에서 선택된 작업을 수행하는 방법으로서,
- 폭이 36 인치(914.4 mm) 이하이고 길이가 72 인치(1,828.8 mm) 이하인 평행사변형 형상의 개구보다 작도록 이동식 플랫폼(100)을 크기설정하는 단계;
- 적어도 하기를 포함하도록 상기 이동식 플랫폼(100)을 구성하는 단계:
- 적어도 하나의 제어 유닛(300),
- 적어도 하나의 마커 검출기(306),
- 적어도 하나의 추진 시스템(400),
- 적어도 하나의 전력 공급부(500), 및
- 적어도 하나의 본질적으로 안전한 인클로저(200);
- 상기 이동식 플랫폼(100)을 본질적으로 안전하도록 구성하는 단계 - 상기 이동식 플랫폼(100)의 적어도 하나의 본질적으로 안전한 인클로저(200)는 상기 적어도 하나의 본질적으로 안전한 인클로저(200)의 내측에서 일어나는 스파크가 상기 적어도 하나의 본질적으로 안전한 인클로저(200)의 외부로 지나가는 것을 방지하고, 상기 스파크는 상기 에너지 물질(12, 14)을 점화시킬 수 있고, 상기 이동식 플랫폼(100)의 모든 스파크 발생 구성요소는 상기 적어도 하나의 본질적으로 안전한 인클로저(200) 내측에 위치됨 -;
- 배치 캐리어(50, 764, 780)를 사용하여 상기 이동식 플랫폼(100)을 상기 탱크(10) 내로 하강시키는 단계;
- 상기 이동식 플랫폼(100)을 상기 에너지 물질(12, 14) 내에 적어도 부분적으로 침지시키는 단계;
- 상기 적어도 하나의 마커 검출기(306)를 사용하여 상기 탱크(10)와 연관된 적어도 하나의 마커(320; 902a, 902b, 902c, 902d; 910)를 검출하는 단계;
- 상기 적어도 하나의 제어 유닛(300)을 사용함으로써 상기 적어도 하나의 검출된 마커(320; 902a, 902b, 902c, 902d; 910)에 기초하여 적어도 하나의 제어 신호(308, 310, 312)를 생성하는 단계;
- 상기 선택된 작업을 수행하기 위해 추진 시스템(400)을 사용하여 상기 이동식 플랫폼(100)을 이동시키는 단계 - 상기 추진 시스템(400)은 적어도 하나의 제어 신호(308)에 의해 제어되고, 상기 적어도 하나의 본질적으로 안전한 인클로저(200) 내측에 위치된 회전력 장치(402)를 사용하고, 상기 회전력 장치(402)는 상기 적어도 하나의 본질적으로 안전한 인클로저(200) 외측에 위치된 구동 조립체(404)에 동력을 공급함 -; 및
- 상기 이동식 플랫폼(100)을 상기 탱크(10)의 내측으로부터 상기 탱크(10)의 외측으로 회수하기 위해 회수 캐리어(50, 706, 740, 764, 780)를 사용하는 단계를 특징으로 하고,
상기 이동식 플랫폼(100)이 상기 탱크(10) 내에 있는 동안 어떠한 능동형(active) 물리적 캐리어도 상기 이동식 플랫폼(100)을 상기 탱크(10) 외부의 물체에 연결하지 않는, 방법. - 제1항에 있어서, 상기 적어도 하나의 본질적으로 안전한 인클로저(200)를, 상기 적어도 하나의 본질적으로 안전한 인클로저(200)의 내부가 적어도 10 초 동안 적어도 3과 1/2 바(bar)의 압력을 받은 후에, 상기 적어도 하나의 본질적으로 안전한 인클로저(200)의 내측에서 일어나는 스파크가 상기 적어도 하나의 본질적으로 안전한 인클로저(200)의 외부로 지나가는 것으로부터 허용하는 경로를 형성하는 소성 변형을 나타내지 않도록 구성하는 단계를 추가로 특징으로 하는, 방법.
- 제1항에 있어서, 상기 이동식 플랫폼(100)을 상기 탱크(10) 내에서 적어도 2개의 상이한 자유도를 갖도록 구성하는 단계; 및 상기 추진 시스템(400)을 사용하여 상기 적어도 2개의 상이한 자유도를 따라서 상기 이동식 플랫폼(100)을 이동시키는 단계를 추가로 특징으로 하는, 방법.
- 제1항에 있어서, 상기 이동식 플랫폼(100)을 10,000 파운드(4,536 ㎏) 미만의 중량을 갖도록 구성하는 단계를 추가로 특징으로 하는, 방법.
- 제1항에 있어서, 상기 적어도 하나의 검출된 마커(320; 902a, 902b, 902c, 902d; 910)에 기초하여 상기 이동식 플랫폼(100)에 대한 진행 방향(heading)을 결정하도록 상기 적어도 하나의 제어 유닛(300)을 프로그래밍하는 단계 - 상기 진행 방향은 상기 적어도 하나의 제어 신호(308)를 생성하는 데 사용됨 - 를 추가로 특징으로 하는, 방법.
- 제1항에 있어서,
- 상기 적어도 하나의 본질적으로 안전한 인클로저(200)를 상기 적어도 하나의 본질적으로 안전한 인클로저(200)의 내부가 적어도 10 초 동안 적어도 3과 1/2 바의 압력을 받은 후에 소성 변형을 나타내지 않도록 구성하는 단계;
- 상기 이동식 플랫폼(100)을 10,000 파운드(4,536 ㎏) 미만의 중량을 갖도록 구성하는 단계;
- 상기 이동식 플랫폼(100)을 상기 탱크(10) 내에서 적어도 2개의 상이한 자유도를 갖도록 구성하는 단계;
- 상기 적어도 하나의 제어 유닛(300)을 상기 적어도 하나의 검출된 마커(320; 902a, 902b, 902c, 902d; 910)에 기초하여 상기 이동식 플랫폼(100)에 대한 진행 방향을 결정하도록 프로그래밍하는 단계;
- 상기 결정된 진행 방향을 사용하여 상기 적어도 하나의 제어 신호(308)를 생성하는 단계; 및
- 상기 적어도 하나의 추진 시스템(400)을 사용하여 상기 적어도 2개의 상이한 자유도를 따라서 상기 이동식 플랫폼(100)을 이동시키는 단계를 추가로 특징으로 하는, 방법. - 제1항에 있어서, 상기 이동식 플랫폼(100)을 상기 탱크(10) 외측의 물체에 연결하는 모든 물리적 캐리어들로부터 상기 이동식 플랫폼(100)을 연결해제하는 단계를 추가로 특징으로 하는, 방법.
- 제1항에 있어서, 상기 적어도 하나의 전력 공급부(500)는 적어도 상기 적어도 하나의 제어 유닛(300), 상기 적어도 하나의 마커 검출기(306), 및 상기 적어도 하나의 추진 시스템(400)에 완전히 에너지공급하기에 충분한 전력을 공급하는 것을 추가로 특징으로 하는, 방법.
- 제1항에 있어서, 상기 탱크(10)의 내측으로부터 상기 탱크(10)의 외측으로 상기 이동식 플랫폼(100)의 회수 후에 상기 탱크(10) 내에 상기 이동식 플랫폼(100)의 구성요소를 남겨두는 단계를 추가로 특징으로 하는, 방법.
- 제1항에 있어서, 수동형(passive) 캐리어(780)를 상기 이동식 플랫폼(100)에 연결하는 단계; 및 상기 이동식 플랫폼(100)이 상기 수동형 캐리어(780)에 연결되어 있는 동안 상기 이동식 플랫폼(100)을 상기 탱크(10) 내에서 이동시키는 단계를 추가로 특징으로 하는, 방법.
- 제1항에 있어서, 상기 에너지 물질(12)은 파 전송 매체를 형성하기 위해 상기 탱크(10)의 내부 표면 및 상기 이동식 플랫폼(100)과 접촉하는 액체인 것을 추가로 특징으로 하고, 상기 이동식 플랫폼(100)으로부터 파를 전송하는 단계를 추가로 특징으로 하는, 방법.
- 제11항에 있어서, 상기 전송된 파의 반사를 검출하는 단계 및 상기 검출된 반사를 나타내는 정보를 상기 이동식 플랫폼(100)의 메모리 모듈(390, 392)에 저장하는 단계를 추가로 특징으로 하는, 방법.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/US2017/066758 WO2019035856A1 (en) | 2017-12-15 | 2017-12-15 | METHODS OF DRIVING TASKS IN A RESERVOIR CONTAINING HAZARDOUS SUBSTANCES |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200041390A true KR20200041390A (ko) | 2020-04-21 |
| KR102190432B1 KR102190432B1 (ko) | 2020-12-14 |
Family
ID=60972380
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207010339A Active KR102190432B1 (ko) | 2017-12-15 | 2017-12-15 | 유해 물질을 포함하는 탱크 내에서 작업을 수행하기 위한 방법 |
| KR1020207015911A Active KR102199726B1 (ko) | 2017-12-15 | 2018-12-15 | 유해 물질을 포함하는 탱크로부터 이동식 플랫폼을 회수하기 위해 테더 부력 몸체를 이용하는 방법 |
| KR1020207015970A Active KR102199728B1 (ko) | 2017-12-15 | 2018-12-15 | 유해한 비전도성 물질에 침지되는 이동식 플랫폼을 작동하면서 전하 축적을 제어하기 위한 방법 |
| KR1020207015969A Active KR102199727B1 (ko) | 2017-12-15 | 2018-12-15 | 유해한 비전도성 물질을 포함하는 탱크로부터 이동식 플랫폼을 회수하면서 사용되는 전압 차이 감소 방법 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207015911A Active KR102199726B1 (ko) | 2017-12-15 | 2018-12-15 | 유해 물질을 포함하는 탱크로부터 이동식 플랫폼을 회수하기 위해 테더 부력 몸체를 이용하는 방법 |
| KR1020207015970A Active KR102199728B1 (ko) | 2017-12-15 | 2018-12-15 | 유해한 비전도성 물질에 침지되는 이동식 플랫폼을 작동하면서 전하 축적을 제어하기 위한 방법 |
| KR1020207015969A Active KR102199727B1 (ko) | 2017-12-15 | 2018-12-15 | 유해한 비전도성 물질을 포함하는 탱크로부터 이동식 플랫폼을 회수하면서 사용되는 전압 차이 감소 방법 |
Country Status (13)
| Country | Link |
|---|---|
| US (4) | US11181438B2 (ko) |
| EP (4) | EP3469352B1 (ko) |
| JP (4) | JP6870154B2 (ko) |
| KR (4) | KR102190432B1 (ko) |
| BR (2) | BR112020005576B1 (ko) |
| CA (4) | CA3077301C (ko) |
| DK (4) | DK3469352T3 (ko) |
| ES (4) | ES2774199T3 (ko) |
| MX (4) | MX2020003239A (ko) |
| PL (4) | PL3469352T3 (ko) |
| PT (4) | PT3469352T (ko) |
| SG (4) | SG11202002652TA (ko) |
| WO (2) | WO2019035856A1 (ko) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| PL3469352T3 (pl) | 2017-12-15 | 2020-06-01 | Tankbots, Inc. | Sposoby realizacji zadań w zbiorniku zawierającym substancje niebezpieczne |
| US11925824B2 (en) * | 2018-08-13 | 2024-03-12 | Phillips 66 Company | Method and apparatus for launching and recovering a remote inspection device from a volatile liquid storage tank |
| US20200240952A1 (en) * | 2019-01-24 | 2020-07-30 | Square Robot, Inc. | Systems, methods and apparatus for in-service tank inspections |
| CA3136306C (en) * | 2019-02-20 | 2023-10-03 | Tankbots, Inc. | Methods for performing tasks inherently safely in a tank containing hazardous substances |
| JP2020140021A (ja) | 2019-02-27 | 2020-09-03 | キヤノン株式会社 | コンバーターレンズ、交換レンズ、及び撮像装置 |
| US11415260B2 (en) | 2019-11-06 | 2022-08-16 | Saudi Arabian Oil Company | Robotic inspection device for tank and pipe inspections |
| US11526168B2 (en) | 2019-11-14 | 2022-12-13 | Saudi Arabian Oil Company | Robotic inspection of in-service tanks through lower wall |
| EP4062092A4 (en) * | 2019-11-20 | 2023-12-20 | Square Robot, Inc. | SYSTEMS, METHODS AND APPARATUS FOR IN-OPERATION TANK INSPECTION |
| EP4091201A4 (en) * | 2020-01-15 | 2024-05-15 | The Methodist Hospital System | ELECTROSTATIC GATE NANOFLUIDIC MEMBRANES FOR THE REGULATION OF MOLECULAR TRANSPORT |
| US12209974B2 (en) | 2020-04-06 | 2025-01-28 | Square Robot, Inc. | Systems, methods and apparatus for safe launch and recovery of an inspection vehicle |
| CN112268977B (zh) * | 2020-09-18 | 2022-08-12 | 天津大学 | 一种实现流动式进气加热的燃烧火焰光学可视化测量装置 |
| CN116256118A (zh) * | 2023-02-14 | 2023-06-13 | 中国特种设备检测研究院 | 一种原油储罐底板泄漏检测装置及方法 |
| TR2024005144A2 (tr) * | 2024-04-29 | 2024-05-21 | Ais Yazilim Ve Bilgisayar Sistemleri Anonim Sirketi | Beyaz ürün depolama tank tabani muayene robotuna ai̇t aktarma parçasi |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6104970A (en) * | 1998-02-17 | 2000-08-15 | Raytheon Company | Crawler inspection vehicle with precise mapping capability |
| JP2007147506A (ja) * | 2005-11-29 | 2007-06-14 | Fujifilm Corp | 配管検査システム及びそれに用いる自走式配管検査装置 |
| US20100321485A1 (en) * | 2009-06-16 | 2010-12-23 | Leonard Pool | Intrinsically safe video inspection system |
| KR101061263B1 (ko) * | 2007-11-26 | 2011-08-31 | 에어 프로덕츠 앤드 케미칼스, 인코오포레이티드 | 용기 내의 검사, 수리 및/또는 다른 작업을 수행하기 위한 장치 및 방법 |
Family Cites Families (116)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6114889A (ja) | 1984-06-29 | 1986-01-23 | フアナツク株式会社 | 内圧防爆構造の電動式産業用ロボツト |
| US2316835A (en) | 1940-09-12 | 1943-04-20 | Crouse Hinds Co | Explosionproof enclosure for electrical devices |
| US2743035A (en) | 1952-10-09 | 1956-04-24 | Charles F Fogarty | Explosion proof battery enclosure |
| US2835722A (en) | 1954-10-19 | 1958-05-20 | Arthur I Appleton | Drainable enclosure for explosionproof electrical systems |
| US2801768A (en) | 1954-12-20 | 1957-08-06 | Westinghouse Electric Corp | Explosion-proof enclosure |
| US3111863A (en) | 1960-07-11 | 1963-11-26 | Sorvall Inc Ivan | Explosion-proof enclosure for centrifuges and the like |
| US3016431A (en) | 1960-07-15 | 1962-01-09 | Pyle National Co | Explosion proof enclosure for motor starters and circuit breakers |
| US3362573A (en) | 1966-05-10 | 1968-01-09 | Metrodynamics Corp | Quick release explosion-proof enclosure |
| US3497638A (en) | 1967-03-20 | 1970-02-24 | Ltv Ling Altec Inc | Explosion-proof acoustic device |
| US3536158A (en) | 1967-05-01 | 1970-10-27 | Ltv Ling Altec Inc | Explosion-proof,horn-loaded loudspeaker |
| US3607604A (en) | 1969-11-19 | 1971-09-21 | Robert D Nava | Flame arrester and pressure relief |
| US3700359A (en) | 1971-05-18 | 1972-10-24 | Science Inc | Explosion-proof liquid fuel pump |
| US3927249A (en) | 1974-09-16 | 1975-12-16 | Appleton Electric Co | Explosion proof plastic electrical enclosure |
| US3974933A (en) | 1975-11-14 | 1976-08-17 | General Signal Corporation | Explosion proof and watertight enclosure with inspectable means for verifying validity of reclosure |
| US4180177A (en) | 1979-04-04 | 1979-12-25 | The United States Of America As Represented By The Secretary Of The Interior | Pressure vent for explosion-proof electrical enclosures |
| US4216349A (en) | 1979-06-29 | 1980-08-05 | General Signal Corporation | Fill control for sealing chamber in drainable enclosure for explosion-proof electrical system |
| US4460826A (en) | 1980-10-24 | 1984-07-17 | Diffracto Ltd. | Fiber optic based robot controls |
| US4328901A (en) | 1980-12-05 | 1982-05-11 | The United States Of America As Represented By The Secretary Of The Interior | Multilayer pressure vent for explosion proof enclosures |
| US4467136A (en) | 1981-11-25 | 1984-08-21 | General Signal Corporation | Drainable enclosure for explosion-proof electrical systems |
| US4557697A (en) * | 1982-07-22 | 1985-12-10 | Institut Okeanologii Imeni P.P. Shirshova | Method of delivering to ocean bottom and raising to surface of station for deep water researches and design of station delivered using said method |
| JPS6119593A (ja) | 1984-07-04 | 1986-01-28 | フアナツク株式会社 | 内圧防爆ロボツトの安全装置 |
| US4620061A (en) | 1984-09-10 | 1986-10-28 | Appleton Electric Co. | Fully grounded, corrosion resistant electrical enclosure |
| US4676574A (en) | 1984-11-28 | 1987-06-30 | Teleco Oilfield Services Inc. | Explosion and flame proof electrical connector protective assembly |
| US4984745A (en) | 1985-01-22 | 1991-01-15 | Gmf Robotics Corporation | Electric robot for use in a hazardous location |
| US6477913B1 (en) | 1985-01-22 | 2002-11-12 | Fanuc Robotics North America, Inc. | Electric robot for use in a hazardous location |
| US4664281A (en) | 1985-10-15 | 1987-05-12 | Killark Electric Manufacturing Co. | Explosion proof enclosure |
| US4668146A (en) | 1985-10-25 | 1987-05-26 | Kabushiki Kaisha Kobe Seiko Sho | Explosion proof construction of motor robot |
| DE3610951A1 (de) | 1986-04-02 | 1987-10-08 | Hagen Batterie Ag | Negative elektrode fuer bleiakkumulatoren |
| CA1269693A (en) | 1987-05-13 | 1990-05-29 | Robert Ross Hamilton | Explosion-proof electrical generator system |
| US5059075A (en) | 1989-03-31 | 1991-10-22 | Cooper Industries, Inc. | Retracting screw assembly |
| US4984449A (en) | 1989-07-03 | 1991-01-15 | Caldwell System Corp. | Ultrasonic liquid level monitoring system |
| US4985653A (en) | 1989-07-20 | 1991-01-15 | Kabushiki Kaisha Kobe Seiko Sho | Internal pressure explosion-proof construction for electrically-driven robot |
| US4961111A (en) | 1989-07-21 | 1990-10-02 | Safe T. V., Inc. | Video inspection system for hazardous environments |
| JPH074792B2 (ja) | 1989-10-06 | 1995-01-25 | 株式会社神戸製鋼所 | 内圧防爆システム |
| JP2513533B2 (ja) * | 1990-11-28 | 1996-07-03 | 株式会社堀場製作所 | 水質測定装置 |
| US5192194A (en) | 1991-04-23 | 1993-03-09 | Air Engineers, Inc. | Explosion proof compressor and a method for explosion proofing a compressor |
| US5205174A (en) | 1991-05-24 | 1993-04-27 | Silverman Eugene B | Scavenger submersible visual and acoustical tank inspection system and method |
| US5381321A (en) | 1992-06-02 | 1995-01-10 | Service Machine Co. | Luminaire for hazardous atmospheres and explosion proof enclosure for power supply therefor |
| US5473953A (en) | 1993-07-09 | 1995-12-12 | The United States Of America As Represented By The United States Department Of Energy | Device for inspecting vessel surfaces |
| US5627800A (en) | 1994-01-28 | 1997-05-06 | Kotler; Seymour R. | Method and apparatus for determining position of a moving object in a tank |
| US6574652B2 (en) | 1994-10-18 | 2003-06-03 | M-I L.L.C. | Intrinsically safe communication and control system for use in hazardous locations including monotoring device with intrinsically safe fluorescent tube backlit |
| JP3190223B2 (ja) * | 1994-12-08 | 2001-07-23 | 東京計装株式会社 | 高液位検出装置の放電防止構造 |
| US6612168B2 (en) | 1995-05-11 | 2003-09-02 | Mts Systems Corporation | Explosion proof magnetostrictive probe |
| US5654053A (en) | 1995-06-15 | 1997-08-05 | The United States Of America As Represented By The Secretary Of The Navy | High-energy-absorbing enclosure for internal explosion containment |
| US5821695A (en) | 1996-08-06 | 1998-10-13 | Appleton Electric Company | Encapsulated explosion-proof pilot light |
| US5819863A (en) | 1996-08-28 | 1998-10-13 | Lockheed Martin Idaho Technologies Company | Vehicle for carrying an object of interest |
| US6522039B1 (en) | 1996-12-13 | 2003-02-18 | Illinois Tool Works Inc. | Remote power source for electrostatic paint applicator |
| JP4119496B2 (ja) | 1997-02-28 | 2008-07-16 | 関西電力株式会社 | タンク内部検査装置 |
| US5947051A (en) | 1997-06-04 | 1999-09-07 | Geiger; Michael B. | Underwater self-propelled surface adhering robotically operated vehicle |
| US5942687A (en) * | 1998-04-01 | 1999-08-24 | The United States Of America As Represented By The Secretary Of The Navy | Method and apparatus for in situ measurement of corrosion in filled tanks |
| AU5586300A (en) | 1999-03-18 | 2000-10-04 | Bechtel Bwxt Idaho, Llc | Ultrasonic delays for use in explosive environments |
| JP4084502B2 (ja) | 1999-07-05 | 2008-04-30 | 独立行政法人科学技術振興機構 | 鉄欠乏耐性イネの創製 |
| US6040543A (en) | 1999-08-13 | 2000-03-21 | Egs Electrical Group Llc | Explosion proof toggle switch |
| US6435619B1 (en) | 1999-12-23 | 2002-08-20 | Geosteering Mining Services, Llc | Method for sensing coal-rock interface |
| EP1197249B1 (en) * | 2000-02-23 | 2003-12-10 | Sega Corporation | Crawler driving device and game device |
| US7296488B2 (en) | 2000-04-20 | 2007-11-20 | United States Of America As Represented By The Secretary Of The Army | System and method for accessing ferrous surfaces normally accessible only with special effort |
| US6641667B2 (en) | 2000-08-29 | 2003-11-04 | Honda Giken Kogyo Kabushiki Kaisha | Robot-mounted two-package-mixing coating device and internal pressure explosion-proof robot |
| US6882412B2 (en) | 2002-08-20 | 2005-04-19 | Ast Services, Llc. | Method for inspecting an internal floating roof in a liquid-containing storage tank |
| US6838614B2 (en) | 2002-09-10 | 2005-01-04 | Ast Services, Llc | Hydraulic and electric umbilical connection for an inspection vehicle for inspecting a liquid-filled tank |
| AU2003270850A1 (en) * | 2002-09-24 | 2004-04-19 | Ast Services, Llc | Broadband long pulse ultrasonic inspection |
| JP2004301665A (ja) * | 2003-03-31 | 2004-10-28 | Toshiba Plant Systems & Services Corp | 壁面検査ロボットシステム及び壁面検査方法 |
| US7168297B2 (en) | 2003-10-28 | 2007-01-30 | Environmental Systems Products Holdings Inc. | System and method for testing fuel tank integrity |
| US20050285464A1 (en) | 2004-06-28 | 2005-12-29 | Orders Marcus D | Method and apparatus for dissipating shaft charge |
| US7687945B2 (en) | 2004-09-25 | 2010-03-30 | Bluwav Systems LLC. | Method and system for cooling a motor or motor enclosure |
| WO2006074250A2 (en) | 2005-01-06 | 2006-07-13 | Quoin International, Inc. | Powered personnel ascender |
| US7296350B2 (en) | 2005-03-14 | 2007-11-20 | Eastman Kodak Company | Method for fabricating a drop generator |
| US20060261192A1 (en) | 2005-04-15 | 2006-11-23 | Durr Systems, Inc. | Robotic paint applicator and method of protecting a paint robot having an explosion proof electric motor |
| JP2006321041A (ja) | 2005-04-20 | 2006-11-30 | Yaskawa Electric Corp | 内圧防爆システム |
| US7373867B2 (en) | 2005-06-08 | 2008-05-20 | Gregory Carl Ryan | System for neutralizing a concealed explosive within a container |
| CN101278244B (zh) | 2005-10-06 | 2012-05-30 | Abb股份有限公司 | 用于工业机器人的控制系统和示教盒 |
| SE530546C2 (sv) | 2005-12-28 | 2008-07-01 | Abb As | Explosionsskyddssystem för manipulatorer eller industrirobotar samt avlastningsventil för ett explosionsskyddssystem |
| WO2008013568A2 (en) | 2005-12-30 | 2008-01-31 | Irobot Corporation | Autonomous mobile robot |
| KR100812724B1 (ko) | 2006-09-29 | 2008-03-12 | 삼성중공업 주식회사 | 실내 위치측정시스템을 이용한 벽면 이동 로봇 |
| US7784570B2 (en) | 2006-10-06 | 2010-08-31 | Irobot Corporation | Robotic vehicle |
| CA2613064A1 (en) | 2006-12-01 | 2008-06-01 | Konstandinos S. Zamfes | Explosion proof enclosure |
| US8072737B2 (en) | 2007-08-30 | 2011-12-06 | Joy Mm Delaware, Inc. | Device for use in an environment where flammable gases may be present |
| JP5251880B2 (ja) | 2007-09-11 | 2013-07-31 | 株式会社安川電機 | 内圧防爆構造のロボット |
| US7757623B2 (en) | 2007-12-20 | 2010-07-20 | Cooper Technologies Company | Explosion indicators for use in explosion-proof enclosures with critical equipment |
| US20100307225A1 (en) * | 2008-01-27 | 2010-12-09 | Kengo Yoshida | Method for testing for the presence of a leak hole in a fluid container |
| US8122780B1 (en) * | 2008-03-20 | 2012-02-28 | The United States Of America As Represented By The United States Department Of Energy | Explosion proof vehicle for tank inspection |
| US7839281B2 (en) | 2008-05-19 | 2010-11-23 | Cooper Technologies Company | Explosion indicator for explosion-proof enclosures |
| WO2010005047A1 (ja) | 2008-07-10 | 2010-01-14 | ライオン株式会社 | 腸内環境改善剤 |
| BRPI0917175A2 (pt) | 2008-08-27 | 2015-11-24 | Abb Research Ltd | robô para ambientes externos hostis |
| US20100180672A1 (en) * | 2008-12-20 | 2010-07-22 | William Thor Zollinger | Methods for inspecting atmospheric storage tanks above ground and in floating vessels |
| SM200900016B (it) | 2009-03-12 | 2011-11-11 | T & A Tecnologie E Ambiente S A | Dispositivo per videoispezione in aree con possibile presenza di atmosfera esplosiva |
| US8227692B2 (en) | 2009-04-13 | 2012-07-24 | Precision Digital Corporation | Explosion-proof enclosure |
| ATE536224T1 (de) | 2009-05-26 | 2011-12-15 | Ibc Robotics Ab | System, werkzeug und verfahren zum reinigen des innenraums eines frachtbehälters |
| WO2011084143A1 (en) | 2009-12-21 | 2011-07-14 | Intrepid Robotics, Inc. | Methods for inspecting atmospheric storage tanks above ground and in floating vessels |
| US8358126B2 (en) | 2010-01-14 | 2013-01-22 | Southwest Research Institute | Magnetostrictive sensor for tank floor inspection |
| EP2542388B1 (en) | 2010-03-01 | 2014-05-07 | Abb As | Installation with mobile robot for a harsh, corrosive outdoor environment |
| US9247655B2 (en) | 2010-06-11 | 2016-01-26 | Honeywell International Inc. | Sheet metal explosion-proof, and flame-proof enclosures |
| US8488740B2 (en) | 2010-11-18 | 2013-07-16 | Panalytical B.V. | Diffractometer |
| JP2012121105A (ja) | 2010-12-09 | 2012-06-28 | Yaskawa Electric Corp | 塗装ロボット及び塗装システム |
| EP2699474B1 (en) | 2011-04-22 | 2015-11-04 | Westinghouse Electric Company Llc | Underwater robotic inspection system |
| JP5684100B2 (ja) * | 2011-11-25 | 2015-03-11 | 学校法人千葉工業大学 | プラットフォームを備えた無人走行用の移動体 |
| US9228932B1 (en) | 2012-03-05 | 2016-01-05 | Vista Precision Solutions, Inc. | Method and apparatus for extending the time between out-of-service, in-tank inspections |
| KR101416141B1 (ko) * | 2012-10-31 | 2014-07-08 | 삼성중공업 주식회사 | 수중 로봇의 작업지원 플랫폼 및 그 방법 |
| TW201420272A (zh) | 2012-11-16 | 2014-06-01 | Hon Hai Prec Ind Co Ltd | 除塵裝置 |
| EP2762279B1 (en) | 2013-02-01 | 2021-01-20 | ABB Power Grids Switzerland AG | Device And Method For Transformer In-Situ Inspection |
| US9193068B2 (en) * | 2013-11-26 | 2015-11-24 | Elwha Llc | Structural assessment, maintenance, and repair apparatuses and methods |
| US10012561B2 (en) * | 2014-11-03 | 2018-07-03 | Sonasearch, Inc. | Integrity testing of storage tank structure using robotic ultrasound |
| EP3224649B1 (en) | 2014-11-26 | 2023-04-05 | iRobot Corporation | Systems and methods for performing simultaneous localization and mapping using machine vision systems |
| US9519289B2 (en) | 2014-11-26 | 2016-12-13 | Irobot Corporation | Systems and methods for performing simultaneous localization and mapping using machine vision systems |
| ES2796699T3 (es) * | 2015-03-16 | 2020-11-30 | Saudi Arabian Oil Co | Comunicaciones entre robots móviles de medio acuático |
| JP6555508B2 (ja) * | 2015-03-20 | 2019-08-07 | 株式会社Ihi | 水中航走体の回収方法及び回収システム |
| US10873686B2 (en) | 2015-06-30 | 2020-12-22 | Rosmeount Inc. | Explosion-proof thermal imaging system |
| JP6660696B2 (ja) * | 2015-09-17 | 2020-03-11 | 三菱重工業株式会社 | 防爆機器 |
| RU2016106942A (ru) * | 2016-02-26 | 2017-08-29 | Акционерное общество "Диаконт" | Устройство, система и способ автоматизированного неразрушающего контроля металлических конструкций |
| JP2017178253A (ja) * | 2016-03-31 | 2017-10-05 | 三井造船株式会社 | 水中ロボット制御システムおよび水中ロボットの制御方法 |
| CN205686495U (zh) | 2016-05-29 | 2016-11-16 | 南昌大学 | 多功能雪地车 |
| WO2017218543A1 (en) | 2016-06-13 | 2017-12-21 | Cooper Technologies Company | Enclosures including light transmissive portions |
| US10131057B2 (en) * | 2016-09-20 | 2018-11-20 | Saudi Arabian Oil Company | Attachment mechanisms for stabilzation of subsea vehicles |
| US20180088592A1 (en) | 2016-09-26 | 2018-03-29 | California Institute Of Technology | Autonomous robotic airship inspection system for large-scale tank interiors |
| PL3469352T3 (pl) | 2017-12-15 | 2020-06-01 | Tankbots, Inc. | Sposoby realizacji zadań w zbiorniku zawierającym substancje niebezpieczne |
| CN108000482B (zh) * | 2017-12-23 | 2020-07-14 | 中信重工开诚智能装备有限公司 | 一种防爆轮式巡检机器人系统 |
| CN207939233U (zh) * | 2018-03-05 | 2018-10-02 | 中信重工开诚智能装备有限公司 | 一种防爆轮式巡检机器人防爆自动充电装置 |
-
2017
- 2017-12-15 PL PL17829417T patent/PL3469352T3/pl unknown
- 2017-12-15 US US16/766,630 patent/US11181438B2/en active Active
- 2017-12-15 JP JP2020519696A patent/JP6870154B2/ja active Active
- 2017-12-15 CA CA3077301A patent/CA3077301C/en active Active
- 2017-12-15 KR KR1020207010339A patent/KR102190432B1/ko active Active
- 2017-12-15 BR BR112020005576-0A patent/BR112020005576B1/pt active IP Right Grant
- 2017-12-15 WO PCT/US2017/066758 patent/WO2019035856A1/en not_active Ceased
- 2017-12-15 SG SG11202002652TA patent/SG11202002652TA/en unknown
- 2017-12-15 MX MX2020003239A patent/MX2020003239A/es unknown
- 2017-12-15 ES ES17829417T patent/ES2774199T3/es active Active
- 2017-12-15 EP EP17829417.9A patent/EP3469352B1/en active Active
- 2017-12-15 DK DK17829417.9T patent/DK3469352T3/da active
- 2017-12-15 PT PT178294179T patent/PT3469352T/pt unknown
-
2018
- 2018-12-15 KR KR1020207015911A patent/KR102199726B1/ko active Active
- 2018-12-15 ES ES18830985T patent/ES2855723T3/es active Active
- 2018-12-15 EP EP19208038.0A patent/EP3629015B1/en active Active
- 2018-12-15 DK DK19208038.0T patent/DK3629015T3/da active
- 2018-12-15 SG SG11202005047UA patent/SG11202005047UA/en unknown
- 2018-12-15 CA CA3100757A patent/CA3100757C/en active Active
- 2018-12-15 JP JP2020526309A patent/JP6808893B1/ja active Active
- 2018-12-15 MX MX2020003238A patent/MX2020003238A/es unknown
- 2018-12-15 SG SG10202006349SA patent/SG10202006349SA/en unknown
- 2018-12-15 PT PT192079481T patent/PT3667313T/pt unknown
- 2018-12-15 KR KR1020207015970A patent/KR102199728B1/ko active Active
- 2018-12-15 KR KR1020207015969A patent/KR102199727B1/ko active Active
- 2018-12-15 CA CA3077399A patent/CA3077399C/en active Active
- 2018-12-15 MX MX2020003236A patent/MX2020003236A/es unknown
- 2018-12-15 EP EP18830985.0A patent/EP3596457B1/en active Active
- 2018-12-15 DK DK19207948.1T patent/DK3667313T3/da active
- 2018-12-15 PL PL19208038T patent/PL3629015T3/pl unknown
- 2018-12-15 BR BR112020005580-8A patent/BR112020005580B1/pt active IP Right Grant
- 2018-12-15 SG SG10202006350SA patent/SG10202006350SA/en unknown
- 2018-12-15 MX MX2020003237A patent/MX2020003237A/es unknown
- 2018-12-15 ES ES19208038T patent/ES2886353T3/es active Active
- 2018-12-15 PT PT188309850T patent/PT3596457T/pt unknown
- 2018-12-15 EP EP19207948.1A patent/EP3667313B1/en active Active
- 2018-12-15 PL PL19207948T patent/PL3667313T3/pl unknown
- 2018-12-15 CA CA3100770A patent/CA3100770C/en active Active
- 2018-12-15 US US16/766,642 patent/US11415566B2/en active Active
- 2018-12-15 PL PL18830985T patent/PL3596457T3/pl unknown
- 2018-12-15 ES ES19207948T patent/ES2887182T3/es active Active
- 2018-12-15 PT PT192080380T patent/PT3629015T/pt unknown
- 2018-12-15 DK DK18830985.0T patent/DK3596457T3/da active
- 2018-12-15 WO PCT/US2018/065888 patent/WO2019118950A2/en not_active Ceased
-
2020
- 2020-06-22 JP JP2020106873A patent/JP6821851B2/ja active Active
- 2020-06-22 JP JP2020106872A patent/JP6821850B2/ja active Active
- 2020-12-04 US US17/112,302 patent/US11604180B2/en active Active
- 2020-12-04 US US17/112,331 patent/US11536705B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6104970A (en) * | 1998-02-17 | 2000-08-15 | Raytheon Company | Crawler inspection vehicle with precise mapping capability |
| JP2007147506A (ja) * | 2005-11-29 | 2007-06-14 | Fujifilm Corp | 配管検査システム及びそれに用いる自走式配管検査装置 |
| KR101061263B1 (ko) * | 2007-11-26 | 2011-08-31 | 에어 프로덕츠 앤드 케미칼스, 인코오포레이티드 | 용기 내의 검사, 수리 및/또는 다른 작업을 수행하기 위한 장치 및 방법 |
| US20100321485A1 (en) * | 2009-06-16 | 2010-12-23 | Leonard Pool | Intrinsically safe video inspection system |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102190432B1 (ko) | 유해 물질을 포함하는 탱크 내에서 작업을 수행하기 위한 방법 | |
| US11828731B2 (en) | Methods for performing tasks inherently safely in a tank containing hazardous substances | |
| BR122020014602B1 (pt) | Método de recuperação de uma plataforma móvel a partir de um tanque |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A302 | Request for accelerated examination | ||
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PA0302 | Request for accelerated examination |
St.27 status event code: A-1-2-D10-D17-exm-PA0302 St.27 status event code: A-1-2-D10-D16-exm-PA0302 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |