KR20250040629A - 로드 포트 설치 위치 조정 기구 - Google Patents
로드 포트 설치 위치 조정 기구 Download PDFInfo
- Publication number
- KR20250040629A KR20250040629A KR1020257001402A KR20257001402A KR20250040629A KR 20250040629 A KR20250040629 A KR 20250040629A KR 1020257001402 A KR1020257001402 A KR 1020257001402A KR 20257001402 A KR20257001402 A KR 20257001402A KR 20250040629 A KR20250040629 A KR 20250040629A
- Authority
- KR
- South Korea
- Prior art keywords
- load port
- wall surface
- axis direction
- axis
- room
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/34—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H10P72/3408—Docking arrangements
-
- H01L21/67775—
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/50—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for positioning, orientation or alignment
-
- H01L21/68—
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0451—Apparatus for manufacturing or treating in a plurality of work-stations
- H10P72/0464—Apparatus for manufacturing or treating in a plurality of work-stations characterised by the construction of the transfer chamber
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
로드 포트 설치 위치 조정 기구를, 대략 폐지된 기판 반송 공간을 내부에 구성하는 반송실(2)의 벽면(2F)에 로드 포트(1)를 설치하는 위치를 조정 가능한 로드 포트 설치 위치 조정 기구 T로서, 벽면(2F)의 폭 방향 W에 있어서의 로드 포트(1)의 위치를 조정하는 X축 방향 조정부 T1과, 벽면(2F)의 두께 방향 D에 있어서의 로드 포트(1)의 위치를 조정하는 Y축 방향 조정부 T2와, 벽면(2F)의 높이 방향 H에 있어서의 로드 포트(1)의 위치를 조정하는 Z축 방향 조정부 T3을 구비하고, 이들 X축 방향 조정부 T1, Y축 방향 조정부 T2 및 Z축 방향 조정부 T3을 집약한 3축 방향 조정 기구 T4를, 벽면(2F)의 상단에 형성된 설치 구멍(2t)을 이용하여 벽면에 설치하는 구성으로 함으로써, 로드 포트(1)를 반송실(2)의 벽면에 고정밀도로 설치하는 작업성이 향상된다.
Description
본 발명은, 기판 반송 장치의 전방면에 설치하는 로드 포트의 위치(설치 위치)를 조정하는 로드 포트 설치 위치 조정 기구에 관한 것이다.
예를 들어 반도체의 제조 공정에 있어서는, 수율이나 품질의 향상을 위해, 클린룸 내에서의 웨이퍼(기판의 일례)의 처리가 이루어지고 있다. 근년에는, 웨이퍼의 주위의 국소적인 공간에 대해서만 청정도를 보다 향상시키는 「미니 인바이런먼트 방식」을 도입하여, 웨이퍼의 반송 그 밖의 처리를 행하는 수단이 채용되고 있다. 미니 인바이런먼트 방식에서는, 하우징의 내부에서 대략 폐지된 웨이퍼 반송실(이하, 반송실)의 벽면의 일부를 구성함과 함께, 고청정의 내부 공간에 웨이퍼 등의 반송 대상물이 수납된 저장 용기인 FOUP(Front-Opening Unified Pod)를 적재하고, FOUP의 도어에 밀착한 상태에서 당해 FOUP 도어를 개폐시키는 기능을 갖는 로드 포트가 반송실에 인접하여 마련되어 있다.
로드 포트를 반송실에 설치하여 로드 포트의 위치를 조정하는 작업은, 반송실의 벽면의 하단부 근방에 마련한 잭 볼트 등의 적절한 조정 볼트를 갖는 다리 받침부에, 로드 포트의 하부에 마련한 다리를 올려놓은 상태에서, 조정 볼트에 대한 적절한 조작에 의해 행해졌다(하기 특허문헌 1, 2 참조).
그러나, 잭 볼트 등의 적절한 조정 볼트에 작업자가 액세스하기 위해서는, 로드 포트의 하단부 근방의 구석진 곳에 기어들어가는 자세가 강요되고, 게다가 그 자세로 조정 작업을 할 필요가 있기 때문에, 작업성이 나쁘고, 위치 조정 처리를 포함하는 설치 작업에 시간이 걸려 버린다고 하는 문제가 있었다.
또한, 종래에는, 반송실에 대한 로드 포트의 설치 작업이 종료된 후에 있어서, 높이 위치 조정용 볼트의 일부가 주변의 파츠보다도 하방으로 돌출된 상태에서 계속해서 노출되어 있으면, 예를 들어 로드 포트 단체 또는 반송실에 설치한 로드 포트를 포크리프트로 이동시킬 때 포크리프트의 갈고리가 높이 위치 조정용 볼트의 하단 부분에 접촉하거나, 걸리거나 하여 전도되는 사태가 발생할 것이 상정되어, 포크리프트 등의 하역 트럭에 의한 이동 작업에 세심한 주의를 기울일 필요가 있었다.
본 발명은, 이와 같은 과제에 주목하여 이루어진 것이며, 주된 목적은, 반송실의 벽면에 대한 로드 포트의 설치 위치의 조정 작업을 편한 자세로 원활하게 행할 수 있고, 하역 트럭에 의한 이동 작업도 원활하게 행하는 것이 가능한 로드 포트 설치 위치 조정 기구를 제공하는 것이다.
즉, 본 발명은, 대략 폐지된 기판 반송 공간을 내부에 구성하는 반송실의 벽면에 로드 포트를 설치하는 위치를 조정 가능한 로드 포트 설치 위치 조정 기구에 관한 것이다. 그리고, 본 발명에 관한 로드 포트 설치 위치 조정 기구는, 벽면의 폭 방향 W(좌우 방향)에 있어서의 로드 포트의 위치를 조정하는 X축 방향 조정부와, 벽면의 두께 방향(전후 방향)에 있어서의 로드 포트의 위치를 조정하는 Y축 방향 조정부와, 벽면의 높이 방향(상하 방향)에 있어서의 로드 포트의 위치를 조정하는 Z축 방향 조정부를 구비하고, 이들 X축 방향 조정부, Y축 방향 조정부 및 Z축 방향 조정부를 집약(유닛화)한 3축 방향 조정 기구를, 벽면의 상단 또는 중단에 형성된 설치 구멍을 이용하여 벽면에 설치하고 있는 것을 특징으로 하고 있다.
이와 같은 본 발명에 관한 로드 포트 설치 위치 조정 기구이면, 벽면의 상단 또는 중단에 형성된 설치 구멍을 이용하여 3축 방향 조정 기구를 벽면에 설치하고 있기 때문에, 작업자는, 벽면의 상단 또는 중단의 위치에서, 벽면에 대한 각 방향(좌우 방향, 전후 방향, 상하 방향)의 로드 포트 설치 위치를, X축 방향 조정부, Y축 방향 조정부, Z축 방향 조정부에 의해 조정할 수 있어, 종래와 같은 무리한 자세로의 조정 작업이 강요되지 않아, 작업 시간의 단축화를 도모할 수 있다. 특히, SEMI 규격에 의해 벽면의 상단, 중단, 하단에 각각 설치 구멍을 형성하는 것이 규정되어 있기 때문에, 이와 같은 설치 구멍을 이용하여 3축 방향 조정 기구를 벽면에 설치함으로써, 전용의 설치 구멍을 별도로 형성할 필요가 없어, 적합하다.
또한, 본 발명에 관한 로드 포트 설치 위치 조정 기구이면, 로드 포트의 하단부 근방에 높이 위치 조정용 볼트를 배치할 필요가 없기 때문에, 로드 포트 단체 또는 반송실에 로드 포트를 설치한 EFEM 전체를 포크리프트로 이동시킬 때 포크리프트의 갈고리가 높이 위치 조정용 볼트에 접촉하거나, 걸리거나 하여 전도되는 사태가 발생하지 않아, 포크리프트 등의 하역 트럭에 의한 이동 작업도 원활하게 행할 수 있어, 안전성 및 작업성이 향상된다.
종래와 같이, 반송실의 벽면의 하단부 근방에 마련한 잭 볼트 등의 적절한 조정 볼트를 갖는 다리 받침부에, 로드 포트의 하부에 마련한 다리부를 올려놓은 상태에서, 조정 볼트에 대한 적절한 조작을 필요로 하는 구성에서는, 로드 포트의 하부에 마련한 다리부를 다리 받침부에 올려놓기 위해 로드 포트 전체를 일시적으로 기울어지게 할 필요가 있었다. 이와 같은 종래의 구성에서는, 웨이퍼의 대형화에 수반하여 대형화 및 중량화가 진행되는 로드 포트를 들어올려 기울어지게 하는 작업이 대규모로 되어, 작업자의 부담이나 리스크가 커진다고 생각된다.
한편, 본 발명에 관한 로드 포트 설치 위치 조정 기구이면, 상술한 3축 방향 조정 기구를 벽면의 상단 또는 중단에 탑재함으로써, 반송실의 벽면의 하단부 근방에 마련하는 다리 받침부에는 높이 조정 기능이 요구되지 않는다. 그 점에 주목하여, 본 발명에 관한 로드 포트 설치 위치 조정 기구가, 베이스 프레임의 하단부에 마련한 다리부와, 벽면의 하단에 마련되어 다리부를 지지하는 다리 받침부를 구비한 것이며, 다리 받침부로서, 다리부의 하단이 끼워지는 홈을 갖고, 또한 당해 홈을 경계로 하여 당해 홈보다도 벽면으로부터 먼 부분인 전방측 부분의 상향면을, 홈보다도 벽면에 가까운 부분인 후방측 부분의 상향면보다도 낮은 위치로 설정한 것을 적용하면, 로드 포트 전체를 일시적으로 기울어지게 하지 않고, 로드 포트의 하부에 마련한 다리부를 다리 받침부에 올려놓는 것이 가능해진다. 즉, 로드 포트를 반송실의 벽면에 설치하는 작업 시에, 로드 포트를 반송실 측으로 이동시키면, 다리부의 하단이 다리 받침부 중 전방측 부분의 상향면의 상방을 통과하여 홈에 끼워지고, 후방측 부분에 닿음으로써 홈에 끼워진 상태를 확보하도록 구성함으로써, 로드 포트를 들어올리는 작업이 불필요해져, 작업자의 부담이나 리스크가 저감된다.
또한, 본 발명에 관한 로드 포트 설치 위치 조정 기구에 있어서, 반송실의 벽면으로부터 소정 거리 이격된 위치에 배치되는 손잡이 본체부를 갖는 손잡이부를 구비하고, 적어도 벽면에 로드 포트를 설치할 때 작업자가 손잡이부 본체에 액세스 가능하게 구성하면, 작업자는 손잡이부 본체를 잡아 로드 포트를 반송실의 벽면을 향하여 압입할 수 있어, 로드 포트의 대형화에도 대응할 수 있다.
본 발명에 따르면, X축 방향 조정부, Y축 방향 조정부 및 Z축 방향 조정부를 로드 포트의 상단 부분 또는 높이 방향 중앙 부분에 집약하여 배치하고 있음으로써 작업자는 비교적 편한 자세로 반송실의 벽면에 대한 로드 포트의 좌우 방향의 설치 위치, 전후 방향의 설치 위치, 상하 방향의 설치 위치를 조정하는 것이 가능한 로드 포트 설치 위치 조정 기구를 제공할 수 있다.
도 1은 본 발명의 일 실시 형태에 있어서의 로드 포트를 구비한 EFEM과 그 주변 장치의 상대 위치 관계를 나타내는 모식적으로 도시하는 측면도.
도 2는 도 1에 도시한 상대 위치 관계를 간략화한 평면도.
도 3은 동 실시 형태에 있어서의 로드 포트를 일부 생략하여 도시하는 정면도.
도 4는 동 실시 형태에 있어서의 로드 포트를 배면측으로부터 본 도면.
도 5는 동 실시 형태에 있어서의 로드 포트를 일부 생략하여 도시하는 배면도.
도 6은 동 실시 형태에 있어서의 연결 전환 기구의 동작 설명도.
도 7은 종래의 연결 전환 기구를 도 6에 대응하여 도시하는 도면.
도 8은 도 5의 A 방향 화살 표시도.
도 9는 도 5의 B-B선 단면도.
도 10은 매퍼를 매핑 위치에 위치하게 한 상태를 도 9에 대응하여 도시하는 도면.
도 11은 동 실시 형태에 있어서의 3축 방향 조정 기구를 실장한 로드 포트의 정면도.
도 12는 도 11의 C 영역을 소정 각도로부터 본 도면.
도 13은 도 11의 C 영역 확대도.
도 14는 도 13의 E-E선 단면도.
도 15는 도 13의 F-F선 단면도.
도 16은 동 실시 형태에 있어서의 로드 포트를 일부 생략하여 도시하는 정면도.
도 17은 도 16의 Q 영역 확대도.
도 18은 도 16의 a-a선 단면도.
도 19는 도 16의 R 영역을 소정 각도로부터 본 도면.
도 20은 도 16의 S 영역을 소정 각도로부터 본 도면.
도 2는 도 1에 도시한 상대 위치 관계를 간략화한 평면도.
도 3은 동 실시 형태에 있어서의 로드 포트를 일부 생략하여 도시하는 정면도.
도 4는 동 실시 형태에 있어서의 로드 포트를 배면측으로부터 본 도면.
도 5는 동 실시 형태에 있어서의 로드 포트를 일부 생략하여 도시하는 배면도.
도 6은 동 실시 형태에 있어서의 연결 전환 기구의 동작 설명도.
도 7은 종래의 연결 전환 기구를 도 6에 대응하여 도시하는 도면.
도 8은 도 5의 A 방향 화살 표시도.
도 9는 도 5의 B-B선 단면도.
도 10은 매퍼를 매핑 위치에 위치하게 한 상태를 도 9에 대응하여 도시하는 도면.
도 11은 동 실시 형태에 있어서의 3축 방향 조정 기구를 실장한 로드 포트의 정면도.
도 12는 도 11의 C 영역을 소정 각도로부터 본 도면.
도 13은 도 11의 C 영역 확대도.
도 14는 도 13의 E-E선 단면도.
도 15는 도 13의 F-F선 단면도.
도 16은 동 실시 형태에 있어서의 로드 포트를 일부 생략하여 도시하는 정면도.
도 17은 도 16의 Q 영역 확대도.
도 18은 도 16의 a-a선 단면도.
도 19는 도 16의 R 영역을 소정 각도로부터 본 도면.
도 20은 도 16의 S 영역을 소정 각도로부터 본 도면.
이하, 본 발명의 일 실시 형태를, 도면을 참조하여 설명한다.
본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T는, 로드 포트(1)를 반송실(2)의 벽면(2F)(전방 벽면)에 설치할 때 반송실(2)의 벽면(2F)(전방 벽면)에 대한 로드 포트(1)의 설치 위치를 조정하기 위한 기구이다.
로드 포트(1)는, 예를 들어 반도체의 제조 공정에 있어서 사용되며, 도 1 및 도 2에 도시한 바와 같이, 클린룸 내에 있어서, 반송실(2)의 벽면(2F)(전방 벽면)의 일부를 구성하고, 반송실(2)과 FOUP 등의 반송 용기(3) 사이에서 웨이퍼 W 등의 반송 대상물의 출입을 행하기 위한 것이다. 로드 포트(1)는, 반송실(2)과 함께 EFEM(Equipment Front End Module)의 일부를 구성하고, 반송 용기(3)와 반송실(2)의 인터페이스 부분으로서 기능하는 것이다. 본 실시 형태에서는, 반송 용기(3), 로드 포트(1), 반송실(2)이 이 순으로 배열되는 전후 방향 D(도 1 등 참조)에 있어서, 반송 용기 측을 전방으로 정의하고, 반송실 측을 후방으로 정의한다.
반송 용기(3)로서는, 도 1에 모식적으로 도시된 바와 같이, 반출입구(31)를 통해 내부 공간(3S)을 후방으로만 개방 가능한 FOUP 본체(32)와, 반출입구(31)를 개폐 가능한 FOUP 도어(33)를 구비한 FOUP(3)를 들 수 있다. FOUP(3)는, 내부에 다단식 슬롯을 마련하고, 각 슬롯에 반송 대상물인 웨이퍼 W를 수용 가능하게 구성되며, 반출입구(31)를 통해 이들 웨이퍼 W를 출입 가능하게 구성된 기지의 것이다. FOUP 본체(32)의 상향면에는, 반송 용기(3)를 자동으로 반송하는 장치(예를 들어 OHT: Over Head Transport) 등에 파지되는 플랜지부(35)를 마련하고 있다.
로드 포트(1)는, 도 1 등에 도시한 바와 같이, 반송실(2)의 내부 공간(2S)을 개방하기 위한 개구부(41)가 형성된 판상을 이루는 베이스 프레임(4)과, 베이스 프레임(4)에 대하여 전방으로 돌출시킨 대략 수평 자세로 마련한 적재 테이블(5)과, 외부로부터 반송되어 온 FOUP(3)를 적재 테이블(5) 상에 보유 지지하는 착좌 보유 지지 기구(6)와, 적재 테이블(5) 상에서 FOUP(3)를 착좌 위치와 반송 대상물 전달 위치 사이에서 전후 방향 D로 이동시키는 견인 기구(7)와, 베이스 프레임(4)의 개구부(41)를 개폐하는 로드 포트 도어(8)와, 로드 포트 도어(8)를 반송실(2) 측으로 후퇴한 도어 개방 위치로 이동시킴으로써 베이스 프레임(4)의 개구부(41)를 개방 상태로 하는 도어 개폐 기구(9)를 구비하고 있다.
베이스 프레임(4)은, 기립 자세로 배치되며, 적재 테이블(5) 상에 적재한 FOUP(3)의 반출입구와 연통할 수 있는 크기의 개구부(41)를 갖는 대략 직사각형 판상의 것이다. 도 1에 베이스 프레임(4)의 개구부(41)를 모식적으로 도시하고 있다. 본 실시 형태의 로드 포트(1)는, 베이스 프레임(4)에 의해 반송실(2)의 벽면(2F)(전방 벽면)의 일부를 구성하고 있다. 베이스 프레임(4)의 하단에는, 캐스터 및 설치 다리부를 갖는 다리부(42)를 마련하고 있다.
적재 테이블(5)은, 베이스 프레임(4) 중 높이 방향 중앙보다도 약간 상방 근방의 위치에 대략 수평 자세로 배치되는 수평 기대(50)(지지대)의 상부에 마련되며, FOUP 본체(32)가 베이스 프레임(4)에 대향하는 방향에서 FOUP(3)를 적재 가능한 것이다. 도 3에 도시한 바와 같이, 적재 테이블(5)에는, 상향으로 돌출시킨 복수의 돌기(51)를 마련하고, 이들 돌기(51)를 FOUP(3)의 저면에 형성된 구멍(도시 생략)에 걸림 결합시킴으로써, 적재 테이블(5) 상에 있어서의 FOUP(3)의 위치 결정을 도모하고 있다.
착좌 보유 지지 기구(6)는, 적재 테이블(5)에 마련한 로크 갈고리(도시 생략)를, FOUP(3)의 저면에 마련한 피로크부(도시 생략)에 걸어 고정한 로크 상태로 함으로써, FOUP(3)를 적재 테이블(5) 상에 보유 지지하는 것이다. 또한, 본 실시 형태의 로드 포트(1)에서는, 피로크부에 대한 로크 갈고리의 로크 상태를 해제함으로써, FOUP(3)를 적재 테이블(5)로부터 이격 가능한 상태로 할 수 있다.
견인 기구(7)는, 적재 테이블(5) 상에서 FOUP(3)를, FOUP 본체(32)가 로드 포트 도어(8)로부터 소정 거리 이격한 위치인 착좌 위치와, FOUP 본체(32)를 로드 포트 도어(8)에 밀착시키는 위치인 반송 대상물 전달 위치 사이에서 전후 방향 D로 이동시키는 것이다. 견인 기구(7)는, 적재 테이블(5)을 전후 이동시키는 도시하지 않은 슬라이드 레일 등을 사용하여 구성되어 있다. 착좌 보유 지지 기구(6) 및 견인 기구(7)는, 적재 테이블(5)이 구비하는 기구로서 파악할 수도 있다.
또한, 도 1에서는, 적재 테이블(5) 상에 있어서의 FOUP(3)의 적재 상태로서, 적재 테이블(5)의 상면에 FOUP(3)의 저면이 접촉하고 있는 상태로서 간략화하여 나타내고 있다. 그러나, 실제로는, 적재 테이블(5)의 상면보다도 상방으로 돌출되어 있는 복수의 돌기(51)가, FOUP(3)의 저면에 형성된 바닥이 있는 구멍에 걸림 결합함으로써 FOUP(3)를 지지하고 있어, 적재 테이블(5)의 상면과 FOUP(3)의 저면은 서로 접촉하지 않고, 적재 테이블(5)의 상면과 FOUP(3)의 저면 사이에 소정의 간극이 형성되도록 규정되어 있다.
로드 포트 도어(8)는, 베이스 프레임(4)의 개구부(41)를 밀폐하는 완전 폐쇄 위치(도 1 참조)와, 완전 폐쇄 위치보다도 반송실(2) 측으로 후퇴한 도어 개방 위치와, 개구부(41)의 개구 스페이스를 후방으로 완전 개방시키는 완전 개방 위치 사이에서 이동 가능한 것이다. 로드 포트 도어(8)는, 도 3에 도시한 바와 같이, FOUP 도어(33)에 흡착 가능한 흡착부(81a)와, FOUP 도어(33)의 걸림 결합 구멍(래치 홀)에 걸림 결합 가능한 걸림 결합 갈고리(81b)를 구비한 흡착 걸림 결합부(81)를 구비하고, 흡착 걸림 결합부(81)에 의한 FOUP 도어(33)와의 걸림 결합 상태를 유지한 채로 FOUP 도어(33)와 일체적으로 완전 폐쇄 위치, 도어 개방 위치 및 완전 개방 위치의 사이에서 이동 가능하게 구성되어 있다. 본 실시 형태에서는, 완전 폐쇄 위치 및 도어 개방 위치에 위치하게 한 로드 포트 도어(8)의 자세를 동일한 자세로 설정하고 있다. 그리고, 완전 개방 위치와 완전 폐쇄 위치 사이에 있어서의 로드 포트 도어(8)의 이동 경로는, 완전 폐쇄 위치에 있는 로드 포트 도어(8)를 그 높이 위치를 유지한 채로 도어 개방 위치까지 반송실(2) 측으로 이동시킨 경로(수평 경로)와, 도어 개방 위치에 있는 로드 포트 도어(8)를 그 전후 위치를 유지한 채로 완전 개방 위치까지 하방으로 이동시킨 경로(연직 경로)로 이루어진다. 도어 개방 위치에 위치하게 한 로드 포트 도어(8)가 연직 방향 및 수평 방향 중 어느 곳으로도 이동할 수 있도록, 도어 개방 위치에 위치하게 한 로드 포트 도어(8)에 보유 지지되는 FOUP 도어(33)는, 로드 포트 도어(8)와 함께 베이스 프레임(4)보다도 후방의 위치(FOUP 본체(32)로부터 완전히 이격되어, 반송실(2)의 내부 공간(2S)에 배치되는 위치)에 위치하게 된다.
이와 같은 로드 포트 도어(8)의 이동은, 로드 포트(1)에 마련한 도어 개폐 기구(9)에 의해 실현하고 있다. 도어 개폐 기구(9)는, 로드 포트 도어(8)를 도어 개방 위치나 완전 개방 위치로 이동시킴으로써, 개방 상태로 한 베이스 프레임(4)의 개구부(41)를 통해 FOUP(3)의 내부 공간(3S)을 반송실(2)에 연통시키는 것이다. 도어 개폐 기구(9)는, 예를 들어 로드 포트 도어(8)를 지지하는 지지 프레임(80)(도 4 및 도 5 참조)을 전후 방향 D로 이동 가능하게 지지하는 가동 블록(도시 생략)이나, 가동 블록을 상하 방향 H로 이동 가능하게 지지하는 슬라이드 레일(도시 생략)을 사용하여 구성되며, 액추에이터 등의 구동원(도시 생략)을 작동시켜, 로드 포트 도어(8)를 전후 방향 D 및 상하 방향 H로 이동시키는 것이다. 또한, 전후 이동용의 액추에이터와, 상하 이동용의 액추에이터를 따로따로 구비한 양태여도 되지만, 부품 점수의 삭감이라고 하는 점에서는, 공통의 액추에이터를 구동원으로 하여 로드 포트 도어(8)의 전후 이동 및 상하 이동을 행하는 양태가 우수하다.
본 실시 형태의 로드 포트 도어(8)는, 도 4 및 도 5에 도시한 바와 같이, 흡착 걸림 결합부(81)의 걸림 결합 갈고리(81b)를 작동시켜 FOUP 도어(33)와 FOUP 본체(32)의 걸림 결합 상태(래치 상태)를 해제하여, FOUP 도어(33)를 FOUP 본체(32)로부터 떼어내기 가능한 상태(언래치 상태)로 하는 연결 전환 기구(83)를 구비하고 있다. 연결 전환 기구(83)는, FOUP 도어(33)에 마련한 도시하지 않은 걸림 결합 구멍(래치 홀)에 걸림 결합 가능한 걸림 결합 갈고리(81b)(래치 키)를 소정 각도 범위 내에서 회동시키는 기구이다. 본 실시 형태에서는, 좌우 한 쌍으로 마련한 한 쌍의 걸림 결합 갈고리(81b)를 서로 연결하는 링크 바(84)와, 실린더 로드(851)의 진퇴 동작에 따라서 링크 바(84)를 좌우 폭 방향 W로 이동시키는 실린더(85)를 구비하고, 실린더(85)의 진퇴 동작에 따라서 좌우 한 쌍의 걸림 결합 갈고리(81b)를 동기하여 회전시키는 연결 전환 기구(83)를 적용하고 있다. 또한, 도 4 및 도 5에서는 도어 커버(89)의 일부를 떼어내어 내부가 보이는 상태로 한 도면이다.
그리고, 걸림 결합 갈고리(81b)가 FOUP 도어(33)의 걸림 결합 구멍에 걸림 결합한 상태에서, 도 6에 모식도로 도시한 바와 같이, 실린더(85)를 작동시켜 피스톤 로드(851)가 제1 스트로크 위치(1)로부터 제2 스트로크 위치(2)까지 이동함으로써, 걸림 결합 갈고리(81b)가 걸림 결합 구멍에 걸림 결합한 상태인 채로 회동하고, 그 결과, FOUP 도어(33)를 FOUP 본체(32)로부터 떼어내기 가능한 상태(언래치 상태)로 할 수 있다(도 6의 (b) 참조). 그 반대로, 걸림 결합 갈고리(81b)가 FOUP 도어(33)의 걸림 결합 구멍에 걸림 결합한 상태에서, 실린더(85)를 작동시켜 피스톤 로드(851)가 제2 스트로크 위치(2)로부터 제1 스트로크 위치(1)까지 이동하면, 걸림 결합 갈고리(81b)가 걸림 결합 구멍에 걸림 결합한 상태인 채로 회동하고, 그 결과, FOUP 도어(33)를 FOUP 본체(32)에 착탈 불가능한 상태(래치 상태)로 할 수 있다(도 6의 (a) 참조).
여기서, 로드 포트 도어(8)에 의한 FOUP 도어(33)의 개폐를 확실하게 행할 수 있도록 하기 위해서는, FOUP 도어(33)의 걸림 결합 구멍에 걸림 결합 갈고리(81b)를 확실하게 삽입하여 걸림 결합하고, 그 걸림 결합 상태에 있는 걸림 결합 갈고리(81b)를 회동시킬 필요가 있다. 종래에는, 도 7에 모식적인 기구로서 나타내는 바와 같이, 걸림 결합 갈고리(81b)의 회전 각도를 고정밀도로 조정하는 구성으로서, 실린더(85)의 피스톤 로드(851)의 선단부에 마련한 실린더 브래킷(86)을 피스톤 로드(851)와 일체로 폭 방향 W로 진퇴 이동시킴으로써, 실린더 브래킷(86)에 연결한 링크 바(84)도 일체로 폭 방향 W로 진퇴 이동시키는 구성이 채용되고, 실린더 브래킷(842)의 진퇴 이동 거리를 규정하는 스토퍼 볼트(87)를 로드 포트 도어(8)에 마련하고, 스토퍼 볼트(87)에 실린더 브래킷(86)이 접촉함으로써, 피스톤 로드(851)의 진퇴 이동을 정지시켜, 피스톤 로드(851)의 진퇴 이동에 연동하는 걸림 결합 갈고리(81b)의 회동을 정지시켜 걸림 결합 갈고리(81b)의 회전 각도를 규정하는 구성이 채용되었다. 도 7의 (a), (b)에, 각각 래치 상태, 언래치 상태를 도시한다.
이와 같은 종래의 구성에서는, 스토퍼 볼트(841)와 실린더 브래킷(842)이 접촉함으로써 발진하고, 그 발진 물질이 반송실(2) 내에 유입될 가능성이 있었다.
따라서, 본 실시 형태에서는, 도 6에 도시한 바와 같이, 적당한 시일 구조에 의해 높은 기밀성이 유지되는 실린더(85)의 내부에 스토퍼 볼트(87)를 마련하고 있다. 그리고, 도 6의 (b)에 도시한 바와 같이, 이 스토퍼 볼트(87)에 피스톤 로드(851)의 기단(엔드단)이 접촉함으로써, 피스톤 로드(851)의 진퇴 이동(구체적으로는 후퇴 방향으로의 이동)을 정지시켜, 피스톤 로드(851)의 진퇴 이동에 연동하는 걸림 결합 갈고리(81b)의 회동을 정지시켜 걸림 결합 갈고리(81b)의 회전 각도를 규정하도록 구성하고 있다. 특히 본 실시 형태에서는, 스토퍼 볼트(87)로서 어저스터 볼트를 적용하고, 실린더(85)의 내부에 있어서의 어저스터 볼트의 선단 위치(피스톤 로드(851)와 접촉하는 위치)를 조정 가능하게 구성하고 있다. 또한, 실린더(85)의 내부에 있어서의 선단 측의 소정 위치에 피스톤 로드(851)의 기단부가 접촉하는 충격 흡수재(88)(쿠션)를 마련함으로써, 피스톤 로드(851)의 전진 방향으로의 이동을 규제할 수 있다. 또한, 스토퍼 볼트(87)의 소정 위치에 충격 흡수재(88)(쿠션)를 마련함으로써, 피스톤 로드(851)의 전진 방향으로의 이동을 규제하도록 구성할 수도 있다.
이와 같은 구성에 의하면, 실린더(85)의 구동 시에 실린더(85)의 내부에서 파츠끼리의 접촉이 발생하지만, 실린더(85)의 내부는 적당한 시일 구조에 의해 높은 기밀성이 유지되고 있기 때문에, 실린더(85)의 내부에서 발생한 분진을 실린더(85)의 내부에 머물게 해 둘 수 있다. 그 결과, 실린더(85)의 내부에서 발생한 분진이 실린더(85)의 외부로 방출되는 사태를 방지·억제할 수 있다. 게다가, 종래의 구성과 비교하여, 실린더(85)의 외부에 별도로 전용의 스토퍼 볼트를 마련할 필요가 없기 때문에, 구성의 간소화 및 부품 점수의 삭감에 기여하여, 비용 절감을 도모할 수 있다.
또한, 본 실시 형태에 관한 로드 포트는, 도어 개폐 기구(9)에 의해 베이스 프레임(4)의 개구부(41)를 개방 상태로 한 상태에 있어서, 반송 대상물 전달 위치에 있는 FOUP(3) 내의 각 슬롯(34)에 있어서의 웨이퍼 W의 유무를 포함하는 웨이퍼 W의 적재 상태에 관한 정보를 매핑하는 매핑 기구 M을 구비하고 있다.
매핑 기구 M은, 도 1, 도 4, 도 5 및 도 8 등에 도시한 바와 같이, FOUP(3) 내에 마련한 다단식 슬롯에 의해 높이 방향 H로 다단상으로 수납된 반송 대상물 W의 유무를 검출 가능한 매핑 센서 M1(송신기 M11, 수신기 M12)을 선단부에 갖는 매퍼 M2와, 매퍼 M2를 지지하는 매핑 암 M3(매핑 이동부)을 구비하여, FOUP(3) 내에 있어서의 반송 대상물 W의 유무나 수납 자세를 검출 가능한 것이다.
매퍼 M2는, 도 8 및 도 9(도 8, 도 9는 각각 도 5의 A 방향 화살 표시도, B-B선 단면도임)에 도시한 바와 같이, 매핑 암 M3의 소정 개소로부터 전방으로 돌출되는 형태로 폭 방향 W로 소정 거리 이격되어 좌우 한 쌍으로 병설되며, 선단부에 매핑 센서 M1을 설치한 것이다. 또한, 도 8 및 도 9에서는, 절단면을 나타내는 해칭(평행 사선)을 생략하였다. 매핑 센서 M1은, 신호인 빔(선광)을 발하는 송신기 M11(발 광 센서)과, 송신기 M11로부터 발해진 신호를 수신하는 수신기 M12(수광 센서)로 구성된다. 또한, 매핑 센서 M1을 송신기와, 송신기로부터 발해진 선광을 송신기를 향하여 반사하는 반사부에 의해 구성하는 것도 가능하다. 이 경우, 송신기는, 수신기로서의 기능도 갖는다. 광축을 좌우의 수평 방향으로 향하게 한 매핑 센서 M1(M11, M12)이 매핑 처리 시에 검지 대상인 반송 대상물 W에 간섭하지 않도록, 매핑 센서 M1(M11, M12)끼리의 좌우의 스팬을 반송 대상물 W의 평면 치수에 따라서 적당한 값으로 설정하고 있다.
매핑 암 M3은, 전후 방향 D에 있어서의 매퍼 M2의 위치를, 도 10에 도시한 위치, 즉, 개방 상태에 있는 개구부(41)를 통해 FOUP(3)에 웨이퍼 W가 수용되어 있는 것을 매핑 센서 M1로 검지 가능한 매핑 위치(P1)와, 도 8 및 도 9에 도시한 위치, 즉, FOUP(3)에 웨이퍼 W가 수용되어 있는 것을 매핑 센서 M1로 검지 불가능한 웨이퍼 매핑 불능 위치(P2) 사이에서 이동시키는 것이다. 또한, 도 10은 매퍼 M2를 매핑 위치(P1)에 위치하게 한 상태를 도 9에 대응하여 도시하는 도면이다.
본 실시 형태의 매핑 암 M3은, 도 3 및 도 4에 도시한 바와 같이, 상부 프레임부 M31과, 상부 프레임부 M31의 양단으로부터 각각 하방으로 연장되는 좌우 한 쌍의 측부 프레임부 M32를 일체 또는 일체적으로 갖는 하향 コ자상을 이루고, 각 측부 프레임부 M32의 하단부를 회전 중심축으로 하여 소정 각도 범위 내에서 회동함으로써, 매퍼 M2의 위치를 매핑 위치(P1)와 웨이퍼 매핑 불능 위치(P2) 사이에서 이동시키는 것이다.
특히, 본 실시 형태에서는, 각 측부 프레임부 M32의 하단부를, 로드 포트 도어(8)의 주변 파츠를 반송실(2) 측으로부터 피복하는 도어 커버(89)의 측면에 회동 가능하게 설치하고 있다. 여기서, 본 실시 형태의 매핑 기구 M은, 매핑 암 M3과 도어 커버(89)의 설치부에 있어서의 피봇점을 중심으로 매핑 암 M3 전체를 틸팅시키는 틸팅 기구 M4를 구비하고 있다. 틸팅 기구 M4는, 도 9 및 도 10에 도시한 바와 같이, 매핑 암 구동용 실린더 M41과, 매핑 암 구동용 실린더 M41의 선단부(실린더 로드의 선단부)에 일단부(하단부)를 연결한 매핑 암 구동용 크랭크 M42와, 매핑 암 구동용 크랭크 M42의 타단부(상단부)에 연결한 매핑 암 피봇축부 M43(피봇점에 상당)을 구비한 것이다. 본 실시 형태에서는, 매핑 암 구동용 실린더 M41 및 매핑 암 구동용 크랭크 M42를 도어 커버(89)의 내부 공간에 배치하고, 또한, 매핑 암 피봇축부 M43 중 매핑 암 M3의 하단부(측부 프레임부 M32의 하단부)에 고정하는 일단부 측의 소정 영역을 제외한 대부분을 도어 커버(89)의 내부 공간에 배치하고 있다. 매핑 암 피봇축부 M43은, 긴 변 방향과 일치하는 축 방향을 로드 포트(1)의 폭 방향 W로 연신되는 자세로 배치되고, 일단부에 매핑 암 M3의 하단부(측부 프레임부 M32의 하단부)을 일체 회전 가능하게 고정하고, 타단부에 매핑 암 구동용 크랭크 M42를 일체 회전 가능하게 고정한 것이다. 본 실시 형태에서는, 매핑 암 피봇축부 M43의 설치 위치를, 측부 프레임부 M32의 높이 방향 중앙 위치보다도 약간 하방의 위치(로드 포트 도어(8)의 높이 방향 중앙에 가까운 위치)로 설정하고 있다(도 5 등 참조).
이와 같은 틸팅 기구 M4(매핑 암 구동 기구)에 의하면, 매핑 암 구동용 실린더 M41의 진퇴 동작에 연동하여 매핑 암 구동용 크랭크 M42가 제1 포지션(1)과 제2 포지션(2) 사이에서 이동한다. 도 10에 도시한 바와 같이, 매핑 암 구동용 크랭크 M42가 제1 포지션(1)에 있는 경우, 매퍼 M2를 매핑 위치(P1)에 위치하게 할 수 있다. 한편, 도 9에 도시한 바와 같이, 매핑 암 구동용 실린더 M41을 작동시켜 매핑 암 구동용 크랭크 M42를 제1 포지션(1)으로부터 제2 포지션(2)으로 이동시키면, 그 이동에 연동하여 매핑 암 피봇축부 M43이 회전하고, 그 회전 각도에 따른 분만큼 매핑 암 M3이 매핑 암 피봇축부 M43을 피봇축으로 하여 틸팅하여, 매퍼 M2를 매핑 위치(P1)로부터 웨이퍼 매핑 불능 위치(P2)로 전환할 수 있다.
본 실시 형태에서는, 매핑 암 구동용 크랭크 M42가 제1 포지션(1)에 있는 것을 검지하는 제1 포지션 검지 센서(도시 생략)와, 매핑 암 구동용 크랭크 M42가 제2 포지션(2)에 있는 것을 검지하는 제2 포지션 검지 센서(도시 생략)를 구비하고, 이들 검출 신호에 기초하여 매핑 암 구동용 실린더 M41의 구동, 나아가서는 틸팅 기구 M4에 의한 매핑 암 M3의 틸팅을 제어함으로써, 매퍼 M2의 위치를 매핑 위치(P1), 웨이퍼 매핑 불능 위치(P2)에 각각 정확하게 위치하게 할 수 있다. 또한, 각 측부 프레임부 M32의 하단부의 하방에는 카운터웨이트(도시 생략)를 마련하여, 틸팅 기구 M4에 의한 매핑 암 M3의 틸팅 동작의 안정화를 도모하고 있다. 본 실시 형태에 있어서의 매핑 암 M3은, 도어 커버(89)와 일체로 전후 방향 및 상하 방향으로 동작하는 것이며, 또한 도어 개폐 기구(9)와는 독립적으로 틸팅 기구 M4에 의해 동작하는 것이다.
도어 커버(89)의 내부 공간은 밀폐 상태로 유지되고 있다. 따라서, 매핑 암 구동용 실린더 M41의 진퇴 동작 시에, 매핑 암 구동용 실린더 M41과 매핑 암 구동용 크랭크 M42의 접촉 부위나, 매핑 암 구동용 크랭크 M42와 매핑 암 피봇축부 M43의 접촉 부위에서 파티클이 발생하였다고 해도, 도어 커버(89)의 내부 공간에 가둘 수 있다. 그 결과, 이들 파티클이 도어 커버(89)의 내부 공간으로부터 반송실(2)의 내부 공간(2S)으로 배출되는 사태를 방지·억제할 수 있다. 또한, 종래에는, 매핑 암의 회전 중심축이 도어 커버(89)보다도 하방의 위치, 예를 들어 로드 포트 도어(8)를 지지하는 지지 프레임(80)의 소정 위치에 설정되고, 틸팅 기구도 그 주변에 배치되었다. 따라서, 매핑 암 구동용 실린더와 매핑 암 구동용 크랭크의 접촉 부위나, 매핑 암 구동용 크랭크와 매핑 암 피봇축부의 접촉 부위에서 발생한 파티클이 반송실의 내부 공간으로 배출되거나, 반송실의 내부 공간을 향하여 날아 올라갈 우려가 있었다. 한편, 상술한 본 실시 형태의 틸팅 기구 M4에 의해 매핑 암 M3을 틸팅·구동시키는 구성에 의하면, 이와 같은 종래의 문제점을 해소할 수 있다.
또한, 본 실시 형태의 틸팅 기구 M4에 의해 매핑 암 M3을 틸팅·구동시키는 구성에 의하면, 매핑 암의 회전 중심축을 도어 커버(89)보다도 하방의 위치, 예를 들어 로드 포트 도어(8)를 지지하는 지지 프레임(80)의 소정 위치에 설정한 종래의 양태와 비교하여, 매핑 암 M3의 암 길이(매핑 암 M3의 회전 중심축 M43으로부터 매핑 암 M3의 상단인 상부 프레임부 M31까지의 길이)가 짧아지기 때문에, 종래의 구성과 비교하여 매핑 암 M3의 동작 시의 진동을 억제할 수 있어, 매핑 정밀도의 향상에 기여한다.
본 실시 형태의 로드 포트(1)는, 적재 테이블(5)에 마련되며 FOUP(3)의 저면 측으로부터 당해 FOUP(3) 내에 질소 가스나 불활성 가스 또는 드라이 에어 등의 적절히 선택된 기체인 환경 가스(퍼지 가스라고도 칭해지며, 본 실시 형태에서는 주로 질소 가스나 드라이 에어를 사용하고 있음)를 주입하여, FOUP(3) 내의 기체 분위기를 환경 가스로 치환 가능한 보텀 퍼지부를 구비할 수 있다. 보텀 퍼지부는, 적재 테이블(5) 상의 소정 개소에 복수 마련된 도시하지 않은 노즐을 주체로 하여 이루어지며, 복수의 노즐을, 소정의 환경 가스를 주입하는 보텀 퍼지 주입용 노즐이나, FOUP(3) 내의 기체 분위기를 배출하는 보텀 퍼지 배출용 노즐로서 기능시키고 있다. 이들 복수의 노즐은, FOUP(3)의 저부에 마련한 도시하지 않은 주입구(주입용 포트) 및 배출구(배기용 포트)에 끼워 맞춘 상태에서 연결 가능한 것이다. 주입구를 통해 보텀 퍼지 주입용 노즐로부터 FOUP(3)의 내부 공간(3S)에 환경 가스를 공급하고, 배출구를 통해 보텀 퍼지 배출용 노즐로부터 FOUP(3)의 내부 공간(3S)의 기체 분위기(이 기체 분위기는, 퍼지 처리 실행 개시로부터 소정 시간까지는 공기나 공기 이외의 청정도가 낮은 환경 가스이며, 당해 소정 시간 경과 후에는 FOUP(3)의 내부 공간(3S)에 충전된 청정도가 높은 환경 가스임)를 배출함으로써, 퍼지 처리를 행하는 것이 가능하다.
이와 같은 로드 포트(1)는, 내부에 반송 로봇(21)을 구비한 반송실(2)과 함께 EFEM을 구성한다. 본 실시 형태에서는, 도 2에 도시한 바와 같이, 반송실(2)의 전방면(전방 벽면)(2F)에 로드 포트(1)를 복수(예를 들어 3대) 나란히 배치하고 있다. EFEM의 작동은, 로드 포트(1)의 컨트롤러(도 2에 도시한 제어부(1C))나, EFEM 전체의 컨트롤러(도 1에 도시한 제어부 C)에 의해 제어된다.
반송실(2)의 내부 공간(2S)에는, 웨이퍼 W 등의 반송 대상물을 로드 포트(1) 상의 FOUP(3)와 처리실 R 사이에서 반송 가능한 반송 로봇(21)이 마련되어 있다. 반송 로봇(21)은, 도 1 및 도 2에 도시한 바와 같이, 예를 들어 복수의 링크 요소를 서로 수평 선회 가능하게 연결하고, 선단부에 반송 대상물 파지부(211)(핸드)를 마련한 암(212)과, 암(212)의 기단부를 구성하는 암 베이스를 선회 가능하게 지지하고 또한 반송실(2)의 폭 방향 W(로드 포트(1)의 병렬 방향)로 주행하는 주행부를 구비한 것이다. 반송 로봇(21)은, 암 길이가 최소로 되는 절첩 상태와, 암 길이가 절첩 상태 시보다도 길어지는 신장 상태 사이에서 형상이 변하는 링크 구조(다관절구조)를 갖는다. 암(212)의 선단에, 개별로 제어 가능한 복수의 핸드(211)를 높이 방향으로 다단형으로 마련한 반송 로봇(21)을 적용할 수 있다.
반송실(2)은, 로드 포트(1) 및 처리실 R이 접속됨으로써, 내부 공간(2S)이 대략 밀폐된 상태가 되도록 구성하고 있다. 반송실(2)의 내부 공간(2S)에는, 도 1에 도시한 바와 같이, 상방으로부터 하방을 향하는 기류인 다운 플로우를 형성하고 있다. 따라서, 반송실(2)의 내부 공간(2S)에 웨이퍼 W의 표면을 오염시키는 파티클이 존재한 경우라도, 다운 플로우에 의해 파티클을 하방으로 밀어내려, 반송 중인 웨이퍼 W의 표면으로의 파티클의 부착을 억제하는 것이 가능해진다. 도 1에는, 다운 플로우를 형성하고 있는 반송실(2) 내의 기체의 흐름을 화살표로 모식적으로 나타내고 있다. 반송실(2)의 측면이나 반송실(2)의 내부 공간(2S)에 버퍼 스테이션, 얼라이너 등의 적절한 스테이션을 배치한 EFEM을 구성하는 것도 가능하다.
본 실시 형태에서는, 반송실(2) 중 로드 포트(1)를 배치한 벽면(2F)(전방 벽면)에 대향하는 벽면(2B)(후방 벽면)에, 처리실 R(반도체 처리 장치)을 폭 방향 W로 복수(도시예에서는 3실) 나란히 배치하고, 각 처리실 R 내에서 각각 다른 적절한 처리가 실시되도록 구성하고 있다. 반도체 제조 공정의 중간 공정이나 후공정에서 행하는 처리예로서, 백 랩 처리 공정, 웨이퍼 적층 처리 공정, 다이싱 처리 공정 등을 들 수 있다. 또한, 처리실 R의 작동은, 처리실 R의 컨트롤러(도 1에 도시한 제어부 RC)에 의해 제어된다. 여기서, 처리실 R 전체의 컨트롤러(제어부 RC)나, EFEM 전체의 컨트롤러(제어부 C)는, 로드 포트(1)의 제어부(1C)의 상위 컨트롤러이다.
각 처리실 R의 내부 공간 RS, 반송실(2)의 내부 공간(2S) 및 각 로드 포트(1) 상에 적재되는 FOUP(3)의 내부 공간(3S)은 고청정도로 유지된다. 한편, 로드 포트(1)를 배치한 공간, 환언하면 처리실 외, EFEM 외는 비교적 저청정도가 된다. 또한, 도 1 및 도 2는, 로드 포트(1) 및 반송실(2)의 상대 위치 관계, 및 이들 로드 포트(1) 및 반송실(2)을 구비한 EFEM과, 처리실 R의 상대 위치 관계를 모식적으로 도시한 도면이다.
그리고, 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T는, 로드 포트(1)를 반송실(2)의 벽면(전방 벽면(2F))에 배치하여 설치할 때, 반송실(2)의 벽면(2F)에 대한 로드 포트(1)의 설치 위치를 조정하기 위한 기구이다.
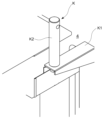
로드 포트 설치 위치 조정 기구 T는, 도 11에 도시한 바와 같이, 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1)의 폭 방향 W(좌우 방향)의 위치를 조정하는 X축 방향 조정부 T1과, 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1)의 두께 방향 D(전후 방향, 깊이 방향)의 위치(올려다보는 구도의 위치)를 조정하는 Y축 방향 조정부 T2와, 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1)의 높이 방향 H(상하 방향)의 위치를 조정하는 Z축 방향 조정부 T3을 구비하고, 이들 3축 방향의 각 조정부(X축 방향 조정부 T1, Y축 방향 조정부 T2, Z축 방향 조정부 T3)를 집약한 3축 방향 조정 기구 T4를 베이스 프레임(4)의 상부 코너부에 배치한 것이다.
로드 포트 설치 위치 조정 기구 T는, 베이스 프레임(4)의 상부 코너부에 탑재(설치) 가능한 로드 포트 가이드부 T5를 구비하고, 이 로드 포트 가이드부 T5에 대하여 폭 방향 W로 진퇴 동작 가능한 X축 방향 이동체 T11과, 로드 포트 가이드부 T5에 대하여 전후 방향 D로 진퇴 동작 가능한 Y축 방향 이동체 T21과, 로드 포트 가이드부 T5에 대하여 높이 방향 H로 진퇴 동작 가능한 Z축 방향 이동체 T31을 구비하고 있다.
X축 방향 이동체 T11은, 도 12 및 도 13에 도시한 바와 같이, 축 방향을 로드 포트(1)의 폭 방향 W에 일치시킨 자세로 배치되는 X축 방향 잭 볼트 T11을 사용하여 구성한 것이다. 작업자가 X축 방향 잭 볼트 T11을 체결하는 조작력을 부여하면, X축 방향 잭 볼트 T11은, 선단을 로드 포트 가이드부 T5의 측면 T51에 압박하는 방향으로 이동한다. X축 방향 잭 볼트 T11은, 로드 포트 가이드부 T5의 측면 T51에 대향하는 위치에 마련한 X축 방향 잭 볼트용 스테이 T12에 진퇴 동작 가능하게 보유 지지되어 있다. X축 방향 잭 볼트용 스테이 T12는, 베이스 프레임(4)에 고정된 것이다. 또한, X축 방향 잭 볼트용 스테이 T12에는, X축 방향 잭 볼트 T11에 나사 결합하는 X축용 너트 T13을 마련하여, X축용 너트 T13에 의해 X축 방향 잭 볼트 T11의 위치를 고정할 수 있다.
X축 방향 조정부 T1은, 이와 같은 X축 방향 이동체 T11을 로드 포트(1)의 폭 방향 W로 진퇴 이동시킴으로써, X축 방향 잭 볼트용 스테이 T12를 포함하는 로드 포트(1) 전체를 로드 포트 가이드부 T5에 대하여 폭 방향 W로 이동시킬 수 있다. 본 실시 형태에서는, X축 방향 이동체 T11에 대하여 체결하는 조작력을 부여하면, X축 방향 잭 볼트용 스테이 T12를 포함하는 로드 포트(1) 전체가 폭 방향 W에 있어서 로드 포트 가이드부 T5(구체적으로는 측면 T51)로부터 이격되는 방향으로 이동하도록 설정하고 있다.
Y축 방향 이동체 T21은, 도 14에 도시한 바와 같이, 축 방향을 로드 포트(1)의 두께 방향 D에 일치시킨 자세로 배치되는 Y축 방향 어저스트 볼트 T21을 사용하여 구성한 것이다. 작업자가 Y축 방향 어저스트 볼트 T21을 체결하는 조작력을 부여하면, Y축 방향 어저스트 볼트 T21은, 선단을 반송실(2)의 벽면(전방 벽면(2F))에 압박하는 방향으로 이동시킨다. Y축 방향 어저스트 볼트 T21은, 로드 포트 가이드부 T5에 진퇴 동작 가능하게 보유 지지되어 있다. 로드 포트 가이드부 T5에는, Y축 방향 어저스트 볼트 T21이 나사 결합하는 나사 구멍 T50을 두께 방향으로 관통시켜 형성하고 있다. 또한, 로드 포트 가이드부 T5 중 두께 방향 D에 있어서 나사 구멍 T50에 겹치는 위치에 Y축용 너트 T22를 마련하여, Y축용 너트 T22 및 나사 구멍 T50에 Y축 방향 어저스트 볼트 T21을 나사 결합시키고 있다. Y축용 너트 T22를 체결함으로써 Y축 방향 어저스트 볼트 T21의 두께 방향 D로의 이동을 규제하여, Y축 방향 어저스트 볼트 T21의 위치를 고정할 수 있다. 본 실시 형태에서는, Y축 방향 어저스트 볼트 T21로서 축 방향으로 관통하는 중공 통형 타입의 것을 적용하고, Y축 방향 어저스트 볼트 T21의 축 중공부 T21a에 로드 포트 설치용 볼트 T6을 삽입한 상태로 배치하고 있다. 로드 포트 설치용 볼트 T6의 전체 길이는, Y축 방향 어저스트 볼트 T21의 전체 길이보다도 길어, 로드 포트 설치용 볼트 T6의 선단부를, 반송실(2)의 벽면(전방 벽면(2F))에 형성되어 있는 설치 구멍(2t)에 직접 또는 너트를 통해 삽입하여 나사 결합 가능하게 구성하고 있다(도 14 참조). 로드 포트 설치용 볼트 T6의 헤드부가 Y축 방향 어저스트 볼트 T21의 일단(전단)에 닿도록 설정하고 있다.
Y축 방향 조정부 T2는, 이와 같은 Y축 방향 이동체 T21을 로드 포트(1)의 두께 방향 D로 진퇴 이동시킴으로써, 반송실(2)의 벽면(전방 벽면(2F))에 대하여 로드 포트(1) 전체를 두께 방향 D(깊이 방향, 올려다보는 구도의 방향)로 이동시킬 수 있다. 본 실시 형태에서는, Y축 방향 이동체 T21에 대하여 체결하는 조작력을 부여하면, 로드 포트(1) 전체가 두께 방향 D에 있어서 반송실(2)의 벽면(전방 벽면(2F))으로부터 이격되는 방향으로 이동하도록 설정하고 있다.
Z축 방향 이동체 T31은, 도 15에 도시한 바와 같이, 축 방향을 로드 포트(1)의 높이 방향 H에 일치시킨 자세로 배치되는 Z축 방향 잭 볼트 T31을 사용하여 구성한 것이다. Z축 방향 잭 볼트 T31은, 로드 포트 가이드부 T5의 하향면 T52에 대향하는 위치에 마련한 Z축 방향 잭 볼트용 스테이 T32에 진퇴 동작 가능하게 보유 지지되어 있다. Z축 방향 잭 볼트용 스테이 T32는, 베이스 프레임(4)에 고정된 것이다. 작업자가 Z축 방향 잭 볼트 T31을 체결하는 조작력을 부여하면, 로드 포트 가이드부 T5의 하향면 T52에 개구된 삽입 구멍 T53에 선단(상단) 부분을 삽입하고 있는 Z축 방향 잭 볼트 T31이 상방으로 이동한다. 그렇게 되면, Z축 방향 잭 볼트 T31의 헤드부가 Z축 방향 잭 볼트용 스테이 T32를 상방으로 밀어올려, Z축 방향 잭 볼트용 스테이 T32를 고정하고 있는 베이스 프레임(4) 전체, 나아가서는 로드 포트(1) 전체가 상방으로 이동한다. 또한, 로드 포트 가이드부 T5의 하향면 T52에는, Z축 방향 잭 볼트 T31에 나사 결합하는 Z축용 너트 T33을 마련하여, Z축용 너트 T33에 의해 Z축 방향 잭 볼트 T31의 높이 방향 H로의 이동을 규제하여, Z축 방향 잭 볼트 T31의 위치를 고정할 수 있다.
Z축 방향 조정부 T3은, 이와 같은 Z축 방향 이동체 T31을 로드 포트(1)의 높이 방향 H로 진퇴 이동시킴으로써, Z축 방향 잭 볼트용 스테이 T32를 포함하는 로드 포트(1) 전체를 로드 포트 가이드부 T5에 대하여 높이 방향 H로 이동시킬 수 있다. 본 실시 형태에서는, Z축 방향 이동체 T31에 대하여 체결하는 조작력을 부여하면, 상술한 바와 같이, Z축 방향 잭 볼트용 스테이 T32를 포함하는 로드 포트(1) 전체가 높이 방향 H에 있어서 로드 포트 가이드부 T5에 접근하는 방향(상방향)으로 이동하도록 설정하고 있다.
본 실시 형태에서는, X축 방향 잭 볼트용 스테이 T12 및 Z축 방향 잭 볼트용 스테이 T32를 일체로 형성하여, 베이스 프레임(4)에 고정하고 있다(도 12 및 도 13 차 참조).
로드 포트 가이드부 T5는, X축 방향 이동체 T11의 선단이 맞닿는 측면 T51과, Z축 방향 이동체 T31이 삽입 가능한 삽입 구멍 T53이 개구되어 있는 하향면 T52를 갖는 플레이트상의 것이다. 본 실시 형태에서는, 도 16에 도시한 바와 같이, 폭 방향 W 중앙 부분을 경계로 두께 치수를 다르게 한 로드 포트 가이드부 T5를 적용하고, 상대적으로 두꺼운 부분에, X축 방향 이동체 T11의 선단이 맞닿는 개소나 삽입 구멍 T53의 형성 개소를 설정하고 있다. 또한, 로드 포트 가이드부 T5 중 두께 치수가 상대적으로 두꺼운 부분에는, 로드 포트 가이드부 T5를 베이스 프레임(4)에 설치하는 플레이트 설치 볼트 T7이 삽입 가능한 플레이트 설치 볼트용 구멍 T54를 형성하고 있다. 플레이트 설치 볼트용 구멍 T54는, 플레이트 설치 볼트 T7이 충분한 유극을 두고 삽입 가능한 사이즈로 설정되어 있다. 본 실시 형태에서는, 플레이트 설치 볼트용 구멍 T54를 높이 방향 H로 소정 피치로 복수 개소(도시예에서는 2개소) 형성하고 있다. 본 실시 형태에서는, 플레이트 커버 T8에 의해 플레이트 설치 볼트용 구멍 T54를 밀봉한 상태에서 플레이트 설치 볼트 T7을 플레이트 설치 볼트용 구멍 T54에 삽입하고, 플레이트 설치 볼트 T7의 선단을 베이스 프레임(4)에 형성한 플레이트 설치 볼트용 고정 구멍(4t)에 나사 결합함으로써, 로드 포트 가이드부 T5를 베이스 프레임(4)에 고정할 수 있다.
로드 포트 가이드부 T5 중 두께 치수가 상대적으로 얇은 부분에는, 도 14에 도시한 바와 같이, Y축 방향 어저스트 볼트 T21이 나사 결합하는 나사 구멍 T50을 형성하고 있다. 나사 구멍 T50을 형성한 개소를 포함하는 로드 포트 가이드부 T5의 소정 영역은, 베이스 프레임(4)에 형성한 절결(4K)에 의해 베이스 프레임(4)에는 직접 겹치지 않고, 반송실(2)의 벽면(전방 벽면(2F))에 대면하게 된다.
이와 같은 X축 방향 조정부 T1, Y축 방향 조정부 T2 및 Z축 방향 조정부 T3을 집약한 3축 방향 조정 기구 T4를 주요소로 하는 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T는, 베이스 프레임(4)의 상부에 있어서의 양쪽 코너부에 배치되며, 각각의 배치 개소에 있어서 이하에 설명하는 수순을 거침으로써, 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1)의 설치 위치를 조정할 수 있다.
우선, 3축 방향 조정 기구 T4에 관한 전준비로서, 플레이트 설치 볼트 T7, X축 방향 이동체 T11인 X축 방향 잭 볼트 T11, 나아가 Z축 방향 이동체 T31인 Z축 방향 잭 볼트 T31을 느슨하게 해 둔다. 이와 같은 전준비 완료 상태에 있는 로드 포트(1)를 베이스 프레임(4)이 수직 자세가 되는 자세로 반송실(2)의 벽면(전방 벽면(2F))에 근접하는 위치까지 이동시킨다. 다음으로, 로드 포트 설치용 볼트 T6을 Y축 방향 어저스트 볼트 T21의 축 중공부 T21a에 삽입하여(미리 삽입된 상태여도 됨), 선단부를 베이스 프레임(4)의 설치 구멍(4t)에 직접 또는 너트를 통해 삽입하여 나사 결합시킨다. 이 시점에 있어서의 로드 포트 설치용 볼트 T6의 체결은 느슨하게 해 두어, 베이스 프레임(4)에 대하여 로드 포트 가이드부 T5가 폭 방향 W(X축 방향), 두께 방향 D(Y축 방향), 높이 방향 H(Z축 방향)로 각각 수㎜ 정도 이동 가능한 상태로 해 두는 것이 긴요하다.
계속해서, 플레이트 설치 볼트 T7을 베이스 프레임(4)에 형성한 플레이트 설치 볼트용 고정 구멍(4t)에 나사 결합하여 강고하게 체결한다. 이에 의해, 로드 포트 가이드부 T5를 베이스 프레임(4)에 고정할 수 있다. 이어서, Y축 방향 조정부 T2에 의한 Y축 방향 설치 위치 조정 처리를 행한다. 구체적으로는, Y축 방향 어저스트 볼트 T21에 대하여 체결하는 조작력을 부여하면, 로드 포트(1) 전체가 반송실(2)의 벽면(전방 벽면(2F))으로부터 이격되는 방향으로 이동하고, Y축 방향 어저스트 볼트 T21에 대하여 체결을 느슨하게 하는 조작력을 부여하면, 로드 포트(1) 전체가 반송실(2)의 벽면(전방 벽면(2F))에 접근하는 방향으로 이동한다. 이와 같은 조작력을 적절히 부여함으로써, 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1) 전체의 두께 방향 D에 있어서의 위치를 수㎜ 단위로 조정할 수 있다. 본 실시 형태에서는, Y축 방향 조정 처리 전의 초기 세트 시의 로드 포트(1)의 위치를 기준 위치로 하여, 당해 기준 위치로부터 Y축 방향(전후 방향 D)으로 최대로 플러스 2㎜(전방으로 2㎜) 이동 가능하게 구성하고 있다. Y축 방향의 위치를 다 조정한 후에, 로드 포트 가이드부 T5에 마련한 Y축용 너트 T22를 체결하는 조작력을 부여함으로써 Y축 방향 어저스트 볼트 T21의 위치를 고정한다.
다음으로, Z축 방향 조정부 T3에 의한 Z축 방향 설치 위치 조정 처리를 행한다. 구체적으로는, Z축 방향 잭 볼트 T31에 대하여 체결하는 조작력을 부여하면, Z축 방향 잭 볼트용 스테이 T32를 포함하는 로드 포트(1) 전체가 반송실(2)의 벽면(전방 벽면(2F))에 대하여 상방향으로 이동하고, Z축 방향 잭 볼트 T31에 대하여 체결을 느슨하게 하는 조작력을 부여하면, Z축 방향 잭 볼트용 스테이 T32를 포함하는 로드 포트(1) 전체가 반송실(2)의 벽면(전방 벽면(2F))에 대하여 하방향으로 이동한다. 이와 같은 조작력을 적절히 부여함으로써, 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1) 전체의 높이 방향 H에 있어서의 위치를 수㎜ 단위로 조정할 수 있다. 본 실시 형태에서는, Y축 방향 조정 처리 후의 로드 포트(1)의 위치를 Z축 방향 기준 위치로 하여, 당해 Z축 방향 기준 위치로부터 Z축 방향(상하 방향 H)으로 플러스 마이너스 5㎜의 범위 내(10㎜의 범위 내)에서 이동 가능하게 구성하고 있다. Z축 방향의 위치를 다 조정한 후에, 로드 포트 가이드부 T5에 마련한 Z축용 너트 T33을 체결하는 조작력을 부여함으로써 Z축 방향 잭 볼트 T31의 위치를 고정한다.
이어서, X축 방향 조정부 T1에 의한 X축 방향 설치 위치 조정 처리를 행한다. 구체적으로는, X축 방향 잭 볼트 T11에 대하여 체결하는 조작력을 부여하면, X축 방향 잭 볼트용 스테이 T12를 포함하는 로드 포트(1) 전체가, 반송실(2)의 벽면(전방 벽면(2F))에 임시 고정되어 있는 로드 포트 가이드부 T5에 대하여 좌측 또는 우측의 일방측(도시예에서는 좌측)으로 이동하고, X축 방향 잭 볼트 T11에 대하여 체결을 느슨하게 하는 조작력을 부여하면, 로드 포트(1) 전체가 로드 포트 가이드부 T5에 대하여 좌측 또는 우측의 타방측(도시예에서는 우측)으로 이동한다. 이와 같은 조작력을 적절히 부여함으로써, 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1) 전체의 폭 방향 W에 있어서의 위치를 수㎜ 단위로 조정할 수 있다. 본 실시 형태에서는, Z축 방향 조정 처리 후의 로드 포트(1)의 위치를 X축 방향 기준 위치로 하여, 당해 X축 방향 기준 위치로부터 X축 방향(좌우 방향)으로 플러스 마이너스 5㎜의 범위 내(10㎜의 범위 내)에서 이동 가능하게 구성하고 있다. X축 방향의 위치를 다 조정한 후에, X축 방향 잭 볼트용 스테이 T12에 마련한 X축용 너트 T13을 체결하는 조작력을 부여함으로써 X축 방향 잭 볼트 T11의 위치를 고정한다.
이상과 같이, Y축 방향 설치 위치 조정 처리, Z축 방향 설치 위치 조정 처리, X축 방향 설치 위치 조정 처리를 순번대로 행함으로써 반송실(2)의 벽면(전방 벽면(2F))에 대한 로드 포트(1) 전체의 3축 방향의 설치 위치를 조정할 수 있다. 또한, 설치 위치 조정의 순번은, i) Y축 방향 설치 위치 조정 처리, ii) Z축 방향 설치 위치 조정 처리, iii) X축 방향 설치 위치 조정 처리의 순번에 한하지 않고, 적당한 순번으로 행해도 상관없다.
마지막으로, 반송실(2)의 벽면(전방 벽면(2F))의 설치 구멍(2t)에 대하여 유극이 있는 상태(느슨한 상태)에서 나사 결합한 로드 포트 설치용 볼트 T6을 강고하게 체결한다. 이에 의해, 로드 포트 가이드부 T5, 및 로드 포트(1) 중 적어도 로드 포트 가이드부 T5가 고정되어 있는 영역 근방이 반송실(2)의 벽면(전방 벽면(2F))에 대하여 어느 방향으로도 이동하지 않는 상태를 유지할 수 있다.
본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T에서는, 베이스 프레임(4)의 상단의 양단에 각각 3축 방향 조정 기구 T4를 마련하여, 3축 방향 조정 기구 T4마다 개별로 조정 가능하게 구성하고 있다. 따라서, 작업자는 종래와 같이 베이스 프레임(4)의 하부의 구석진 위치에 마련된 잭 볼트에 대하여 기어들어가는 자세로 액세스하여 로드 포트(1)의 높이 방향 H의 위치 조정을 행하는 것이 강요되지 않고, 선 자세로 3축 방향 조정 기구 T4에 액세스하여 로드 포트(1)의 설치 위치 조정 작업을 원활하게 행할 수 있어, 작업성이 향상되고, 설치 작업 시간의 단축화를 도모할 수 있다. 게다가, 3축 방향 조정 기구 T4는, 반송실(2)의 벽면(전방 벽면(2F))에 있어서 SEMI 규격에서 형성 개소가 규정되어 있는 설치 구멍(2t)을 이용하여 반송실(2)의 벽면(전방 벽면(2F))에 설치할 수 있어, 전용의 설치 구멍을 반송실(2)의 벽면(전방 벽면(2F))에 마련할 필요가 없고, 기존의 반송실(2)의 벽면(전방 벽면(2F))에도 간단하게 탑재하여 설치할 수 있어, 도입 비용의 삭감에도 기여한다.
게다가, 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T에 의하면, 베이스 프레임(4)의 하부에 있어서 높이 위치 조정용 잭 볼트를 주변 파츠보다도 하방으로 돌출시킨 자세로 배치해 둘 필요가 없기 때문에, 예를 들어 로드 포트(1) 단체, 또는 반송실(2)에 로드 포트(1)를 설치한 EFEM 전체를 포크리프트로 이동시킬 때 포크리프트의 갈고리가 높이 위치 조정용 잭 볼트의 노출 부분(하단 부분)에 접촉하거나, 걸리거나 하여 전도된다고 하는 사태가 발생하지 않아, 안전면의 리스크를 저감할 수 있다.
또한, 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T는, 도 16 내지 도 18에 도시한 바와 같이, 로드 포트(1)의 하부에 마련한 다리부 L1과, 반송실(2)의 벽면(전방 벽면(2F))의 하단에 마련한 다리 받침부 L2를 구비하고, 다리부 L1을 다리 받침부 L2에 올려놓음으로써 SEMI 규격에 준거한 로드 포트(1)의 설치 상태로 할 수 있다. 여기서, 도 16은 로드 포트(1)의 하반부의 정면도이며, 도 17은 도 16의 Q 영역 확대도이며 일부 파츠를 떼어낸 도면이며, 도 18은 도 17의 a-a선 단면도이다.
본 실시 형태에서는, 도 18에 도시한 바와 같이, 다리 받침부 L2로서, 다리부 L1의 하단부가 끼워지는 홈 L21을 폭 방향 W로 연속하여 형성한 블록상의 것을 적용하고 있다. 다리부 L1로서, 도 17 및 도 18에는 잭 볼트를 예시하고 있지만, 단순한 막대상의 파츠를 적용할 수도 있다. 한편, 이와 같은 다리부 L1의 하단부를 홈 L21에 수용한 상태에서 지지하는 블록상의 다리 받침부 L2로서, 본 실시 형태에서는, 도 18에 도시한 바와 같이, 상향면의 높이를 홈 L21의 전후에서 다르게 한 것을 적용하고 있다. 구체적으로는, 홈 L21의 전방측의 상향면(전방측 상향면 L22)을 홈 L21의 후방측의 상향면(후방측 상향면 L23)보다도 낮은 위치로 설정하고 있다. 따라서, 전방측 상향면 L22로부터 홈 L21의 바닥까지의 깊이는, 후방측 상향면 L23으로부터 홈 L21의 바닥까지의 깊이보다도 얕다.
다리 받침부 L2는, 반송실(2)의 벽면(전방 벽면(2F))의 하단에 고정한 하부 설치 금속 부재(2U)에 고정되어 있다. 본 실시 형태에서는, 로드 포트(1)의 좌우 양쪽 사이드의 하단부에 각각 다리부 L1을 마련하고, 하부 설치 금속 부재(2U)에 있어서 다리부 L1에 대응하는 위치에 다리 받침부 L2를 마련하고 있다.
또한, 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T는, 도 16, 도 19 및 도 20에 도시한 바와 같이, 로드 포트(1)를 반송실(2)의 벽면(전방 벽면(2F))에 설치할 때 작업자가 파지하여 로드 포트(1) 전체를 반송실(2)의 벽면(전방 벽면(2F)) 측으로 이동시키는 압박력을 부여 가능한 손잡이부 K를 구비하고 있다. 여기서, 도 19는 도 16의 R 영역을 로드 포트(1)의 한쪽의 측방으로부터 본 사시도이며, 도 20은 도 16의 S 영역을 로드 포트(1)의 다른 쪽의 측방으로부터 본 사시도이다. 또한, 도 19 및 도 20에서는, 손잡이부 K의 주변 파츠를 일부 떼어낸 상태로서 나타내고 있다.
손잡이부 K는, 기단부를 베이스 프레임(4)에 고정하고, 전방을 향하여 연신하는 손잡이 수용부 K1과, 손잡이 수용부 K1의 선단부에 기립 자세로 지지되는 막대상의 손잡이 본체부 K2를 구비하고 있다. 손잡이 본체부 K2는, 손잡이 수용부 K1에 대하여 상방으로 튀어나온 사용 자세(도 19 참조)와, 손잡이 수용부 K1의 하방에 배치되어 있는 커버(50)(도 16 참조)의 내부 공간에 저장되는 저장 자세(도 20 참조) 사이에서 자세 변경 가능하게 손잡이 수용부 K1에 지지되어 있다. 본 실시 형태에서는, 이와 같은 손잡이부 K를 베이스 프레임(4) 중 적재 테이블(5)을 폭 방향 W로 사이에 두는 위치에 좌우 한 쌍으로 마련하고 있다.
그리고, 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T에 의하면, 다리 받침부 L2에 다리부 L1을 설치하여 로드 포트(1)를 반송실(2)의 벽면(전방 벽면(2F))에 설치할 때, 반송실(2)의 정면측(전방)으로부터 벽면(전방 벽면(2F))에 접근하는 위치까지 로드 포트(1)를 적당한 수단으로 이동시킨 시점 이후, 작업자는 손잡이 수용부 K1에 사용 자세로 지지된 손잡이 본체부 K2를 파지하여, 반송실(2)의 벽면(전방 벽면(2F)) 측으로 미는 조작력을 부여한다. 그 결과, 로드 포트(1) 전체를 반송실(2)의 벽면(전방 벽면(2F)) 측으로 이동시킬 수 있어, 로드 포트(1)의 하부에 마련한 다리부 L1을 다리 받침부 L2에 설치할 수 있다. 이때, 다리 받침부 L2의 상향면 L22, L23에 단차를 마련하여, 홈 L21을 경계로 한 전방측 상향면 L22를 후방측 상향면 L23보다도 낮은 위치로 설정하고 있음으로써, 다리부 L1을 다리 받침부 L2에 올려놓기 위해 로드 포트(1) 전체를 일시적으로 경사지게 하거나, 들어올리는 작업이 필요하지 않고, 다리부 L1의 하단부가 다리 받침부 L2의 홈 L21에 끼워 넣어져 들어가는 위치까지 로드 포트(1) 전체를 미는 작업에 의해, 다리부 L1을 다리 받침부 L2에 원활하게 올려놓을 수 있다. 또한, 다리부 L1을 다리 받침부 L2에 다 올려놓은 시점 이후의 적당한 타이밍에 손잡이 본체부 K2를 사용 자세(도 19 참조)로부터 저장 자세(도 20 참조)로 변경한다. 이에 의해, 손잡이 본체부 K2를 커버(50)의 내부 공간에 저장할 수 있어, 로드 포트 설치 작업 후에 있어서 손잡이부 K가 다른 파츠에 간섭하는 등의 문제가 발생하는 것을 방지할 수 있다.
이와 같이, 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T에 의하면, 블록상의 다리 받침부 L2의 상면에 형성한 다리부 받침 홈 L21을 경계로, 다리부 받침 홈 L21보다도 전방측의 상향면 L22를 다리부 받침 홈 L21보다도 후방측의 상향면 L23보다도 낮은 위치로 설정하고 있기 때문에, 작업자가 로드 포트(1)를 반송실(2)의 벽면(전방 벽면(2F))에 설치할 때, 로드 포트(1)를 반송실(2)의 벽면(전방 벽면(2F))을 향하여 압입하는 조작력을 작업자가 부여함으로써, 다리부 L1이 다리부 받침 홈 L21보다도 전방측의 상향면 L22를 통과하여 다리부 받침 홈 L21에 원활하게 끼워지고, 다리 받침부 L2 본체 중 다리부 받침 홈 L21보다도 후방측의 부분에 다리부 L1이 닿음으로써 그 이상 반송실(2)의 벽면(전방 벽면(2F))을 향하여 이동하는 사태를 방지하여, 다리부 L1이 다리부 받침 홈 L21에 끼워 넣어진 상태를 유지할 수 있다. 따라서, 대형의 웨이퍼(대형 각 기판)용에 대응 가능하게 개발되는 대형이며 또한 중량이 큰 로드 포트(1)라도, 반송실(2)의 벽면(전방 벽면(2F))으로의 설치 시에 로드 포트 전체를 경사지게 하는 작업이 강요되는 것에 의한 리스크(로드 포트(1)의 전도 등)를 피할 수 있다. 또한, 다리 받침부 L2로 다리부 L1을 받치는(지지하는) 장소가 특정됨으로써, 종래 애매하였던 설치 시의 로드 포트(1)의 작업 개소를 명확하게 할 수 있어, 누가 작업자라도 용이하게 설치 작업을 진행시킬 수 있다.
특히, 본 실시 형태에 관한 로드 포트 설치 위치 조정 기구 T는, 작업자의 손이 닿는 범위에 베이스 프레임(4)으로부터 수평 방향으로 연신되는 손잡이부 K를 구비하고 있기 때문에, 웨이퍼의 대형화에 수반하여, 이와 같은 웨이퍼를 수납하는 대형의 FOUP를 적재 가능한 대형의 적재 테이블(5)을 구비한 로드 포트(1)이며, 특히 작업자가 적재 테이블(5)의 선단(선단) 측으로부터 손을 뻗어도 베이스 프레임(4)에 도달하지 않는 대형이며 또한 중량이 큰 로드 포트(1)라도, 작업자는 손잡이부 K를 잡아 로드 포트(1)를 반송실(2)의 벽면(전방 벽면(2F))을 향하여 압입하는 조작력을 부여할 수 있어, 반송실(2)의 벽면(전방 벽면(2F))으로의 설치 작업을 원활하게 또한 적절하게 행할 수 있다.
또한, 본 발명은 상술한 실시 형태에 한정되는 것은 아니다. 예를 들어, 상술한 실시 형태에서는, X축 방향 조정부, Y축 방향 조정부, Z축 방향 조정부로서, 각각 볼트의 나사 결합 진퇴 동작을 이용한 구성을 예시하였지만, 볼트의 종류는 특별히 한정되지는 않고, 또한 볼트 이외의 파츠의 진퇴 동작을 이용한 구성으로 할 수도 있다.
또한, 반송실의 벽면의 중단에 형성된 설치 구멍(도 3에 있어서 부호 2t, (2c)로 나타내는 구멍)을 이용하여 3축 방향 조정 기구를 벽면에 설치하고 있는 구성이어도 상관없다. 상술한 대로, 반송실의 벽면에는 SEMI 규격에 의해 상단, 중단, 하단에 있어서의 소정 개소에 설치 구멍을 형성할 것이 요구되고 있다. 이와 같은 SEMI 규격상의 상단·중단의 구멍을 이용하여 본 발명에 관한 위치 조정 기구를 반송실의 벽면에 설치할 수 있다.
반송 용기는, FOUP에 한정되지는 않고, FOUP 이외의 용기, 예를 들어 FOSB(Front Opening Shipping Box)나 카세트 등이어도 된다.
본 발명에 관한 로드 포트는, EFEM의 일부를 구성하는 것으로서 사용 가능한 것은 상술한 대로이며, EFEM 이외의 반송 장치에 적용할 수도 있고, 그 경우도 반송실에 대한 로드 포트의 설치 작업성을 도모하기 위해, 본 발명의 설치 위치 조정 기구를 적용할 수 있다.
상술한 실시 형태에서는, 반송 대상물로서 웨이퍼를 예시하였지만, 반송 대상물이, 레티클, 액정 반송 대상물이나 유리 반송 대상물 등을 포함하는 각형 기판, 링 프레임 웨이퍼, 컬쳐 플레이트, 배양 용기, 디시, 혹은 샬레 등이어도 된다.
그 밖에, 각 부의 구체적 구성에 대해서도 상기 실시 형태에 한정되는 것은 아니고, 본 발명의 취지를 일탈하지 않는 범위에서 다양하게 변형이 가능하다.
1: 로드 포트
2: 반송실
2t: 설치 구멍
T: 로드 포트 설치 위치 조정 기구
T1: X축 방향 조정부
T2: Y축 방향 조정부
T3: Z축 방향 조정부
T4: 3축 방향 조정 기구
L1: 다리부
L2: 다리 받침부
K: 손잡이부
K2: 손잡이 본체부
2: 반송실
2t: 설치 구멍
T: 로드 포트 설치 위치 조정 기구
T1: X축 방향 조정부
T2: Y축 방향 조정부
T3: Z축 방향 조정부
T4: 3축 방향 조정 기구
L1: 다리부
L2: 다리 받침부
K: 손잡이부
K2: 손잡이 본체부
Claims (3)
- 대략 폐지된 기판 반송 공간을 내부에 구성하는 반송실의 벽면에 로드 포트를 설치하는 위치를 조정 가능한 로드 포트 설치 위치 조정 기구이며,
상기 벽면의 폭 방향에 있어서의 상기 로드 포트의 위치를 조정하는 X축 방향 조정부와,
상기 벽면의 두께 방향에 있어서의 상기 로드 포트의 위치를 조정하는 Y축 방향 조정부와,
상기 벽면의 높이 방향에 있어서의 상기 로드 포트의 위치를 조정하는 Z축 방향 조정부를 구비하고,
상기 X축 방향 조정부, Y축 방향 조정부 및 Z축 방향 조정부를 집약한 3축 방향 조정 기구를, 상기 벽면의 상단 또는 중단 중 어느 한쪽에 형성된 설치 구멍을 이용하여 상기 벽면에 설치하고 있는 것을 특징으로 하는 로드 포트 설치 위치 조정 기구. - 제1항에 있어서,
베이스 프레임의 하단부에 마련한 다리부와,
상기 벽면의 하단에 마련되며 상기 다리부를 지지하는 다리 받침부를 구비하고,
상기 다리 받침부는, 상기 다리부의 하단이 끼워지는 홈을 갖고, 또한 당해 홈을 경계로 하여 당해 홈보다도 상기 벽면으로부터 먼 부분인 전방측 부분의 상향면을, 상기 홈보다도 상기 벽면에 가까운 부분인 후방측 부분의 상향면보다도 낮은 위치로 설정하고 있는, 로드 포트 설치 위치 조정 기구. - 제1항 또는 제2항에 있어서,
상기 반송실의 상기 벽면으로부터 소정 거리 이격된 위치에 배치되는 손잡이 본체부를 갖는 손잡이부를 구비하고, 적어도 상기 벽면에 상기 로드 포트를 설치할 때 작업자가 상기 손잡이부 본체에 액세스 가능하게 구성하고 있는, 로드 포트 설치 위치 조정 기구.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022114694 | 2022-07-19 | ||
| JPJP-P-2022-114694 | 2022-07-19 | ||
| PCT/JP2023/024330 WO2024018872A1 (ja) | 2022-07-19 | 2023-06-30 | ロードポート取付位置調整機構 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20250040629A true KR20250040629A (ko) | 2025-03-24 |
Family
ID=89617690
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020257001402A Pending KR20250040629A (ko) | 2022-07-19 | 2023-06-30 | 로드 포트 설치 위치 조정 기구 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20260018447A1 (ko) |
| JP (1) | JPWO2024018872A1 (ko) |
| KR (1) | KR20250040629A (ko) |
| CN (1) | CN119563230A (ko) |
| TW (1) | TW202422762A (ko) |
| WO (1) | WO2024018872A1 (ko) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5910019U (ja) | 1982-07-12 | 1984-01-21 | 日産自動車株式会社 | 液面計測装置 |
| JPS5988076U (ja) | 1982-12-07 | 1984-06-14 | 三菱電機株式会社 | 乗客コンベヤの欄干装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6138721A (en) * | 1997-09-03 | 2000-10-31 | Asyst Technologies, Inc. | Tilt and go load port interface alignment system |
| JP2000332079A (ja) * | 1999-05-18 | 2000-11-30 | Tdk Corp | 半導体製造装置用ロードポート、ロードポート取り付け機構及びロードポート取り付け方法 |
| TW461014B (en) * | 2000-10-11 | 2001-10-21 | Ind Tech Res Inst | A positioning method and device for wafer loading devices |
| JP3871535B2 (ja) * | 2001-09-17 | 2007-01-24 | 大日本スクリーン製造株式会社 | ロードポート装置及びこの装置と上位装置との取り付け機構 |
| US10541165B2 (en) * | 2016-11-10 | 2020-01-21 | Applied Materials, Inc. | Systems, apparatus, and methods for an improved load port backplane |
-
2023
- 2023-06-30 KR KR1020257001402A patent/KR20250040629A/ko active Pending
- 2023-06-30 CN CN202380054204.0A patent/CN119563230A/zh active Pending
- 2023-06-30 JP JP2024535000A patent/JPWO2024018872A1/ja active Pending
- 2023-06-30 US US18/995,509 patent/US20260018447A1/en active Pending
- 2023-06-30 WO PCT/JP2023/024330 patent/WO2024018872A1/ja not_active Ceased
- 2023-07-19 TW TW112126932A patent/TW202422762A/zh unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5910019U (ja) | 1982-07-12 | 1984-01-21 | 日産自動車株式会社 | 液面計測装置 |
| JPS5988076U (ja) | 1982-12-07 | 1984-06-14 | 三菱電機株式会社 | 乗客コンベヤの欄干装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202422762A (zh) | 2024-06-01 |
| US20260018447A1 (en) | 2026-01-15 |
| WO2024018872A1 (ja) | 2024-01-25 |
| JPWO2024018872A1 (ko) | 2024-01-25 |
| CN119563230A (zh) | 2025-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9508579B2 (en) | Purge apparatus and load port | |
| US8302637B2 (en) | Method of processing an object in a container and lid opening/closing system used in the method | |
| KR102792244B1 (ko) | 웨이퍼 스토커 | |
| US8413693B2 (en) | Lid opening/closing system of an airtight container | |
| TW201633436A (zh) | 門開閉裝置、搬運裝置、分類裝置、收納容器之開放方法 | |
| KR20190122161A (ko) | 배기 노즐 유닛, 로드 포트 및 efem | |
| JP2011187539A (ja) | ガス注入装置、ガス排出装置、ガス注入方法及びガス排出方法 | |
| JP5048590B2 (ja) | 基板処理装置 | |
| WO2004102655A1 (ja) | クリーンボックス開閉装置を備えるクリーン装置 | |
| TW201641387A (zh) | 門開閉裝置、搬送裝置、分類裝置、及收納容器的連結方法 | |
| JP2019186293A (ja) | ロードポート及びefem | |
| JP6687840B2 (ja) | ロードポート | |
| KR20250040629A (ko) | 로드 포트 설치 위치 조정 기구 | |
| KR102811816B1 (ko) | 로봇 및 이를 구비한 기판 반송 시스템 | |
| KR100922051B1 (ko) | 반도체 처리 장치에 있어서의 포트 구조 | |
| US10403529B2 (en) | Carrier transport device and carrier transport method | |
| JP4175560B2 (ja) | 容器開閉装置 | |
| US20020106267A1 (en) | Container and loader for substrate | |
| JP3974992B2 (ja) | 基板収納容器の蓋開閉装置および基板搬入搬出装置 | |
| US20040126206A1 (en) | Mini-environment system and operating method thereof | |
| JP2004047839A (ja) | 密閉容器開閉装置 | |
| KR102866392B1 (ko) | 이종 캐리어 탑재에 따른 로드포트의 누설 기류차단장치 | |
| US20230395416A1 (en) | Load port and method of moving stage of load port | |
| KR20250162411A (ko) | 이종(異種) 수납용기를 탑재하기 위한 로드포트 스테이지장치 | |
| JP2003133386A (ja) | 基板搬入出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |