WO2010073475A1 - Système de véhicule de transport et procédé de commande de véhicule de transport - Google Patents
Système de véhicule de transport et procédé de commande de véhicule de transport Download PDFInfo
- Publication number
- WO2010073475A1 WO2010073475A1 PCT/JP2009/006105 JP2009006105W WO2010073475A1 WO 2010073475 A1 WO2010073475 A1 WO 2010073475A1 JP 2009006105 W JP2009006105 W JP 2009006105W WO 2010073475 A1 WO2010073475 A1 WO 2010073475A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- transport vehicle
- standby
- standby point
- empty
- transport
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
Definitions
- the present invention relates to a transport vehicle system and a transport vehicle control method, and more particularly to a transport vehicle system and a transport vehicle control method in which a plurality of transport vehicles travel on a route having a plurality of standby points.
- a transport vehicle system having a predetermined route, a plurality of stations provided on the route, and a plurality of transport vehicles that travel along the route and transport articles is known.
- cargo grasping loading of articles from the station to the transport vehicle
- unloading loading of articles from the transport vehicle to the station
- a conveyance command is assigned to an empty conveyance vehicle at the nearest position so as to move to that station and receive the article. The reason for selecting the nearest empty transport vehicle is to quickly transport the article.
- the transport vehicle becomes empty after executing the transport command.
- the empty transport vehicle is stopped at a standby point provided on the route, and prepares for the next transport command (see, for example, Patent Document 1). Also, the empty transport vehicle that has been driven out of the standby point by another transport vehicle moves to the next standby point and stops there.
- a standby point is installed in the vicinity of a device having a high frequency of handling commands.
- priority is set for each standby point, and the empty transport vehicle travels toward the standby point with higher priority.
- the empty transport vehicle travels aiming at a standby point with a high priority, other transport vehicles waiting at the standby point on the way are expelled. Therefore, the traveling efficiency of the transport vehicle may be reduced in the entire system.
- An object of the present invention is to improve the traveling efficiency of a transport vehicle in a transport vehicle system and a transport vehicle control method in which a plurality of transport vehicles travel on a route having a plurality of standby points.
- the transport vehicle system includes a route having a plurality of standby points, a plurality of transport vehicles traveling along the route, and a controller capable of assigning a travel command to the transport vehicle.
- the controller has travel command assignment means.
- the travel command assigning means assigns a travel command for causing the empty transport vehicle closest to each standby point to travel to each standby point. In this system, since the travel command for traveling to each standby point is assigned to the empty transport vehicle closest to each standby point, the traveling efficiency of the transport vehicle is improved.
- the controller may further include an empty transport vehicle number grasping unit and a standby point selecting unit.
- the empty conveyance vehicle number grasping means grasps the number of empty conveyance vehicles to which no travel command is assigned.
- the standby point selection means selects the same or less standby points as the empty transport vehicle. In this system, since the controller assigns a traveling command to the same or less standby points with respect to the number of empty transport vehicles, it is difficult for remote transport points to be assigned to each transport vehicle. Therefore, the traveling efficiency of the transport vehicle is improved.
- the travel command assigning means may assign the travel command not only to the empty transport vehicle that is traveling, but also to the empty transport vehicle that is stopped at the standby point. In this system, since the travel command is assigned to the transport vehicle already stopped at the standby point, the travel efficiency of the transport vehicle in the system is improved as compared with the case where the travel command is allocated only to the transport vehicle that is traveling.
- the controller further includes priority storage means for storing the priority of the standby point.
- the standby point selection unit may select a standby point according to the priority stored in the priority storage unit. In this system, since the standby point is selected according to the priority, the standby point can be quickly determined.
- a transport vehicle control method includes the following steps in a transport vehicle system having a route having a plurality of standby points and a plurality of transport vehicles traveling along the route. ⁇ Steps to determine the number of empty transport vehicles that are not assigned a run command ⁇ Wait point selection step to select standby points that are the same as or less than the number of empty transport vehicles ⁇ Free transport vehicles that are closest to each standby point In this method, a running command to a waiting point equal to or less than the number of empty transported vehicles is assigned, so that a far standby point is assigned to each transported vehicle. Hard to be assigned. Therefore, the traveling efficiency of the transport vehicle is improved.
- the traveling efficiency of the transport vehicle is improved in the transport vehicle system in which a plurality of transport vehicles travel on a route having a plurality of standby points.
- the partial top view which shows the layout of the carrier system which concerns on one Embodiment of this invention.
- the block diagram which shows the control system of a conveyance vehicle system.
- the block diagram which shows the function means of a conveyance vehicle controller.
- the flowchart which shows the control operation
- FIG. The schematic diagram of the conveyance vehicle system for demonstrating the idle conveyance vehicle standby operation
- the transport vehicle system 1 as one embodiment of the present invention is a system for causing a plurality of transport vehicles 3 to travel on a predetermined route.
- the transport vehicle 3 travels on the route, loads an article from a target location according to a transport command assigned by a host controller (described later), then travels to the transport destination location and loads the article at the transport destination location. put out.
- the type of the transport vehicle may be an overhead traveling vehicle, an unmanned transport vehicle that travels without a track, or a tracked cart.
- Fig. 1 shows the layout of the carrier system 1.
- the transport vehicle system 1 includes a plurality of circuit travel paths 5 and a main travel path 7 that connects the plurality of circuit travel paths 5.
- the trunk road 7 forms a single circuit as a whole.
- a plurality of processing devices 9 are provided along the circumferential traveling path 5, and a plurality of stockers 11 are provided along the backbone traveling path 7. The stocker 11 realizes a buffer function between the processing device 9 groups in the circuit travel path 5.
- the equipment such as the processing device 9 and the stocker 11 is provided with a warehousing port 13 for carrying the goods into the equipment and a warehousing port 15 for picking up the goods from the equipment to the transport vehicle 3.
- a warehousing port 13 and the warehousing port 15 may be shared.
- FIG. 2 shows a control system 19 of the transport vehicle system 1.
- the control system 19 includes a production controller 21, a distribution controller 23, a stocker controller 25, and a transport vehicle controller 27.
- the logistics controller 23 is a higher-order controller of the stocker controller 25 and the transport vehicle controller 27.
- the transport vehicle controller 27 has a function of managing a plurality of transport vehicles 3 and assigning a transport command to them.
- the “conveyance command” includes a command related to traveling and a command related to the load holding position and the unloading position.
- the manufacturing controller 21 can communicate with each processing device 9.
- the processing device 9 transmits a conveyance request (load grasping request / unloading request) of the article for which processing has been completed to the manufacturing controller 21.
- the manufacturing controller 21 transmits a transport request from the processing device 9 to the physical distribution controller 23, and the physical distribution controller 23 transmits a report to the manufacturing controller 21.
- the distribution controller 23 When the distribution controller 23 receives a transport request from the production controller 21, if the stocker 11 is accompanied by a receipt or delivery, it sends a receipt or delivery command to the stocker controller 25 at a predetermined timing. Then, the stocker controller 25 transmits an incoming / outgoing command to the stocker 11 accordingly. Further, when the distribution controller 23 receives a conveyance request from the manufacturing controller 21, it converts it into a conveyance command, and performs an operation for assigning the conveyance command to the conveyance vehicle 3.
- the transport vehicle controller 27 continuously communicates with each transport vehicle 3 to create a transport command, and obtains position information based on the position data transmitted from each transport vehicle 3.
- position information There are the following two examples of acquiring position information.
- a plurality of points are set on the circuit travel path 5 so that a passing signal is transmitted to the transport vehicle controller 27 when the transport vehicle 3 passes the points.
- the conveyance vehicle controller 27 memorize
- an encoder is provided in the transport vehicle 3, and the travel distance after passing the point is transmitted as position data from the transport vehicle 3 to the transport vehicle controller 27, and the transport vehicle controller 27 thereby transmits the position of the transport vehicle 3.
- the memory (not shown) of the transport vehicle controller 27 stores transport track layout data.
- the layout data includes information on a plurality of standby points (described later) and their priorities.
- the transport vehicle 3 has a controller (not shown) including a control unit and a memory.
- the controller of the transport vehicle 3 is a computer that includes a CPU, a RAM, a ROM, and the like and executes a program.
- the controller of the transport vehicle 3 can communicate with the transport vehicle controller 27.
- the transport vehicle 3 has a route map in the memory, and continues traveling while comparing the coordinates described in the route map with the internal coordinates of the own machine (coordinates obtained by the encoder).
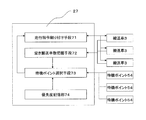
- FIG. 3 is a block diagram showing functional means of the transport vehicle controller.
- the transport vehicle controller 27 includes a travel command assigning unit 71, an empty transported vehicle number grasping unit 72, a standby point selecting unit 73, and a priority storage unit 74.
- the travel command assigning means 71 assigns a travel command for causing the empty transport vehicle closest to each standby point to travel to each standby point (described later).
- the travel command assigning means 71 assigns the travel command not only to the empty transport vehicle that is traveling, but also to the empty transport vehicle that is stopped at the standby point.
- the empty conveyance vehicle number grasping means 72 grasps the number of empty conveyance vehicles to which no travel command is assigned.
- the priority storage unit 74 stores the priority of standby points.
- the standby point selection means 73 selects the same or less standby points as the empty transport vehicle according to the priority stored in the priority storage unit 74 (described later).
- the travel command assigning means 71 issues a travel command to the transport vehicle 3 based on the travel status report from the transport vehicle 3 and the selected standby point information from the standby point selection means 73.
- the empty conveyance vehicle number grasping means 72 grasps the number of empty conveyance vehicles based on the package loading information from the conveyance vehicle 3.
- the standby point selection unit 73 selects a standby point based on the information on the number of empty transport vehicles from the empty transport vehicle number grasping unit 72 and the standby point priority information from the priority storage unit 74.
- FIG. 4 is a flowchart showing control of the standby operation of the transport vehicle in which the transport vehicle controller 27 executes all or at least a part of the transport vehicle standby operation.
- the standby operation of the transport vehicle refers to an operation of causing the empty transport vehicle to travel to a predetermined standby point. This control operation is executed at a predetermined timing.
- the predetermined timing may be a constant cycle, or may be a different cycle depending on the situation. Moreover, you may perform as needed at the timing when a new empty conveyance vehicle generate
- step S1 it is checked whether or not the ratio of empty transport vehicles is greater than or equal to a set value in a specific area (for example, one bay). If it is less than the set value, the control operation is terminated. This is because this control operation does not work effectively when the ratio of empty transport vehicles is not so high.
- step S2 If it is greater than the set value, go to step S2.
- step S2 an empty conveyance vehicle is searched and the number and position of empty conveyance vehicles are specified. This function is realized by the empty conveyance vehicle number grasping means 72.
- step S3 a high-priority standby point that is a target of the transport vehicle call is selected.
- the number of high-priority standby points is set equal to or less than the number of empty transport vehicles in the control area. This function is realized by the standby point selection means 73.
- step S4 target standby point switching is executed.
- the standby point with the highest priority is first selected as a target, and the target standby points are switched in the order of higher priority from the next. This function is realized by the standby point selection means 73.
- step S5 it is determined whether or not the empty transport vehicle is stopped at the target standby point. This function is realized by the standby point selection means 73. If stopped, the process proceeds to step S9.
- step S6 it is determined whether an empty transport vehicle is approaching the target standby point. This function is realized by the standby point selection means 73. When not approaching, it transfers to step S9.
- step S7 it is determined whether or not the nearest transport vehicle is in an empty state. This function is realized by the empty conveyance vehicle number grasping means 72. If it is not empty, the process proceeds to step S9.
- step S8 If it is empty, go to step S8.
- an empty transport vehicle is called into the target standby point. Specifically, a travel command to the target standby point is assigned to the empty transport vehicle closest to the target standby point. This function is realized by the travel command assigning means 71.
- the empty transport vehicles to be allocated include not only the empty transport vehicles that are running but also the empty transport vehicles that are stopped at other standby points.
- step S9 it is determined whether or not empty transport vehicles are stopped at all standby points. This function is realized by the standby point selection means 73. When it is stopped, the control operation is finished. If not, the process returns to step S4.
- FIG. 5 is a schematic guided vehicle system 51 prepared for specifically explaining the above control operation.
- the transport vehicle system 51 includes a transport track 52 and a plurality of transport vehicles (a first transport vehicle 53a, a second transport vehicle 53b, and a third transport vehicle 53c).
- the conveyance track 52 has a large loop 52a that can circulate in one direction, and further has a small loop 52b that can circulate using only a part of the large loop 52a.
- a plurality of stop points 54 are provided on the transport track 52. In FIG. 5, three of the stop points 54 are illustrated as a first standby point 54A, a second standby point 54B, and a third standby point 54C.
- the first standby point 54A is provided in the small loop 52b
- the second standby point 54B is provided in the large loop 52a.
- the third standby point 54C is provided downstream of the second standby point 54B in the traveling direction in the large loop 52a.
- the priority is set higher in the order of the first standby point 54A, the second standby point 54B, and the third standby point 54C.
- a first transport vehicle 53 a, a second transport vehicle 53 b, and a third transport vehicle 53 c exist on the transport track 52 as empty transport vehicles.
- the first transport vehicle 53a is stopped at the first standby point 54A
- the second transport vehicle 53b is stopped at the second standby point 54B.
- the third transport vehicle 53c is located on the downstream side in the traveling direction from the first standby point 54A in the small loop 52b, and has just finished unloading and is an empty transport vehicle.
- step S1 it is determined whether or not the ratio of empty transport vehicles is equal to or greater than a set value. In this embodiment, the description will be continued on the assumption that the set value is exceeded.
- step S2 an empty conveyance vehicle is searched, and the presence and position of the first conveyance vehicle 53a, the second conveyance vehicle 53b, and the third conveyance vehicle 53c are confirmed.
- step S3 since there are three empty transport vehicles, the same number of three locations, specifically, the first standby point 54A, the second standby point 54B, and the third standby point 54C are selected. More specifically, the third standby point 54C is added to the high priority standby point list.
- step S4 the first standby point 54A is selected as the target standby point.
- step S5 since the first transport vehicle 53a is stopped at the first standby point 54A, the process proceeds to step S9.
- step S9 since the empty transport vehicle is not stopped at all the standby points (the empty transport vehicle is not stopped at the third standby point 54C), the process returns to step S4.
- step S4 the target is switched to the second standby point 54B.
- step S5 since the second transport vehicle 53b is stopped at the second standby point 54B, the process proceeds to step S9.
- step S9 since the empty transport vehicle is not stopped at all the standby points (the empty transport vehicle is not stopped at the third standby point 54C), the process returns to step S4.
- step S4 switching to the third standby point 54C is performed.
- step S5 since there is no empty transport vehicle stopped at the third standby point 54C, the process proceeds to step S6.
- step S6 since the empty conveyance vehicle has not approached, it transfers to step S7.
- step S7 since the 2nd conveyance vehicle 53b which is the nearest conveyance vehicle is vacant, it transfers to step S8.
- step S8 the second transport vehicle 53b is called into the third standby point 54C. Specifically, a travel command up to the third standby point 54C is assigned to the second transport vehicle 53b. As a result, the second transport vehicle 53b travels from the second standby point 54B to the third standby point 54C.
- step S9 the process proceeds to step S9 and further returns to step S4.
- step S4 the target is switched to the first standby point 54A.
- step S5 since the first transport vehicle 53a is stopped at the first standby point 54A, the process proceeds to step S9.
- step S9 since the empty transport vehicle is not stopped at all the standby points (the empty transport vehicle is not stopped at the second standby point 54B), the process returns to step S4.
- step S4 the target is switched to the second standby point 54B.
- step S5 since there is no empty transport vehicle stopped at the second standby point 54B, the process proceeds to step S6.
- step S6 since the empty conveyance vehicle has not approached, it transfers to step S7.
- step S7 since the first transport vehicle 53a which is the nearest transport vehicle is vacant, the process proceeds to step S8.
- step S8 the first transport vehicle 53a is called into the second standby point 54B. Specifically, a travel command up to the second standby point 54B is assigned to the first transport vehicle 53a. As a result, the first transport vehicle 53a travels from the first standby point 54A to the second standby point 54B.
- step S9 the process proceeds to step S9 and further returns to step S4.
- step S4 the target is switched to the third standby point 54C.
- step S5 since the second transport vehicle 53b is stopped at the second standby point 54B, the process proceeds to step S9.
- step S9 since the empty transport vehicle is not stopped at all the standby points (the empty transport vehicle is not stopped at the first standby point 54A), the process returns to step S4.
- step S4 the target is switched to the first standby point 54A.
- step S5 since there is no empty transport vehicle stopped at the first waiting point 54A, the process proceeds to step S6.
- step S6 since the empty conveyance vehicle has not approached, it transfers to step S7.
- step S7 since the 3rd conveyance vehicle 53c which is the nearest conveyance vehicle is vacant, it transfers to step S8.
- step S8 the third transport vehicle 53c is called into the first standby point 54A. Specifically, a travel command up to the first standby point 54A is assigned to the third transport vehicle 53c. As a result, the third transport vehicle 53c travels to the first standby point 54A.
- step S9 it is confirmed that the empty transport vehicle is stopped at all the standby points, and the control operation ends.
- the second transport vehicle 53b travels to the third standby point 54C
- the first transport vehicle 53a travels to the second standby point 54B
- the third transport vehicle 53c travels to the first standby point 54A.
- the third transport vehicle 53c (a transport vehicle that does not stop at the standby point) is assigned a travel command up to the third standby point 54C (a standby point where the empty transport vehicle does not stop). Therefore, the third transport vehicle 53c drives the first transport vehicle 53a and the second transport vehicle 53b out of the first standby point 54A and the second standby point 54B.
- FIG. 6 is a schematic guided vehicle system 61 prepared for specifically explaining the control operation.
- the transport vehicle system 61 includes a transport track 62 and a plurality of transport vehicles (a first transport vehicle 63a, a second transport vehicle 63b, and a third transport vehicle 63c).
- the conveyance track 62 has a large loop 62a that can circulate in one direction, and further has a small loop 62b that can circulate using only a part of the large loop 62a.
- a plurality of stop points 64 are provided on the transport track 62. In FIG. 6, three of the stop points 64 are illustrated as a first standby point 64A, a second standby point 64B, and a third standby point 64C.
- the first waiting point 64A is provided in the small loop 52b, and the second waiting point 64B is provided in the large loop 52a.
- the third standby point 64C is provided upstream of the second standby point 64B in the traveling direction in the large loop 52a. Note that the priority is set higher in the order of the first standby point 64A, the second standby point 64B, and the third standby point 64C.
- first transport vehicle 63 a In the state shown in FIG. 6, there are a first transport vehicle 63 a, a second transport vehicle 63 b, and a third transport vehicle 63 c as empty transport vehicles on the transport track 62.
- the first transport vehicle 63a is stopped at the first standby point 64A
- the second transport vehicle 63b is stopped at the second standby point 64B
- the third transport vehicle 63c is stopped at the third standby point 64C.
- a transport request is issued from the stop point 64D (a point upstream of the second standby point 64B in the traveling direction)
- a transport command is assigned to the first transport vehicle 63a.
- the first transport vehicle 63a travels from the first standby point 64A to the stop point 64D, and performs a cargo grasping operation.
- step S1 it is determined whether or not the ratio of empty transport vehicles is equal to or greater than a set value. In this embodiment, the description will be continued on the assumption that the set value is exceeded.
- step S2 an empty transport vehicle is searched to confirm the presence and position of the second transport vehicle 63b and the third transport vehicle 63c.
- step S3 since there are two empty transport vehicles, the same two places, specifically, the first standby point 64A and the second standby point 54B are selected. More specifically, the third standby point 54C is deleted from the list of standby points with high priority already.
- step S4 the first waiting point 64A is selected as a target.
- step S5 since there is no empty transport vehicle stopped at the first standby point 64A, the process proceeds to step S6.
- step S6 since the empty conveyance vehicle has not approached, it transfers to step S7.
- step S7 since the 3rd conveyance vehicle 63c which is the nearest conveyance vehicle is vacant, it transfers to step S8.
- step S8 the third transport vehicle 63c is called into the first standby point 64A. Specifically, a travel command up to the first standby point 64A is assigned to the third transport vehicle 63c. As a result, the third transport vehicle 63c travels from the third standby point 64C to the first standby point 64A.
- step S4 the target is switched to the second standby point 64B.
- step S4 since the second transport vehicle 63b is stopped at the second standby point 64B, the process proceeds to step S9.
- step S9 it is confirmed that the empty transport vehicle is stopped at all the standby points, and the control operation ends.
- the transport vehicle system 51 includes a transport track 52 having a plurality of standby points 54A to 54C, a plurality of transport vehicles 3 that travel on the transport track 52, and a transport vehicle controller that can assign a travel command to the transport vehicle 3. 27.
- the transport vehicle controller 27 includes travel command assigning means 71.
- the travel command assigning means 71 assigns a travel command for causing the empty transport vehicle closest to each standby point to travel to each standby point.
- a travel command for traveling to each standby point 54A to 54C is assigned to the empty transport vehicle closest to each standby point, so that the traveling efficiency of the transport vehicle 3 is improved.
- the transport vehicle controller 27 further includes empty transport vehicle number grasping means 72 and standby point selecting means 73.
- the empty conveyance vehicle number grasping means 72 grasps the number of empty conveyance vehicles to which no travel command is assigned.
- the standby point selection means function selects the same or less standby points as the empty transport vehicle. Since the transport controller 27 assigns a traveling command to the standby points 54A to 54C that are equal to or less than the number of empty transport vehicles, it is difficult to assign far standby points to each transport vehicle 3. Therefore, the traveling efficiency of the transport vehicle 3 is improved.
- the closest first standby point 54A is allocated to the third transport vehicle 53c without the second standby point 54B and the third standby point 54C being allocated.
- the travel command assigning means 71 assigns the travel command not only to the empty transport vehicle that is traveling but also to the empty transport vehicle that is stopped at the standby points 54A to 54C. Since the travel command is also assigned to the empty transport vehicle that has already stopped at the standby points 54A to 54C, the travel of the transport vehicle 3 in the transport vehicle system 1 is compared with the case where the travel command is assigned only to the empty transport vehicle that is traveling. Efficiency is improved. As a specific example, in the transport vehicle system 51 shown in FIG. 5, the travel command is assigned not only to the traveling third transport vehicle 53c but also to the stopped first transport vehicle 53a and the second transport vehicle 53b.
- the transport vehicle controller 27 further includes a priority storage unit 74 that stores the priorities of the standby points 54A to 54C.
- the standby point selection unit 73 selects a standby point according to the priority stored in the priority storage unit 74. In this system, since the standby point is determined according to the priority, the standby point can be determined quickly.
- the transport vehicle control method includes the following steps in a transport vehicle system 1 having a transport track 52 having a plurality of standby points 54A to 54C and a plurality of transport vehicles 3 traveling on the transport track 52. .
- Step S2 grasping the number of empty transport vehicles for which the number of empty transport vehicles to which no travel command is assigned is grasped
- step S3 Standby point selection step
- step S8 for assigning a running command for causing the empty transport vehicle closest to each waiting point to travel to each waiting point.
- a traveling command to the same or less standby points as the number of empty transport vehicles is assigned, so that it is difficult for remote transport points to be assigned to each transport vehicle 3. Therefore, the traveling efficiency of the transport vehicle 3 is improved.
- the layout and control system of the transport vehicle system are not limited to the first embodiment and the second embodiment. Further, the type of equipment to which the transport vehicle system is applied is not limited to the above embodiment.
- the present invention relates to a transport vehicle system and a transport vehicle control method, and is particularly applicable to a transport vehicle system and a transport vehicle control method in which a plurality of transport vehicles travel on a route having a plurality of standby points.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
L'invention porte sur un système de véhicule de transport, une pluralité de véhicules de transport parcourant un itinéraire qui est pourvu d'une pluralité de points d'attente, et sur un procédé de commande de véhicule de transport, afin d'améliorer l'efficacité de transport des véhicules de transport. Le système de véhicule de transport (1) est pourvu d'un itinéraire qui présente une pluralité de points d'attente ; d'une pluralité de véhicules de transport parcourant l'itinéraire, et d'un dispositif de commande de véhicule de transport capable d'attribuer des instructions de parcours aux véhicules de transport. Le dispositif de commande de véhicule de transport comporte une fonction d'attribution d'instruction de parcours (étape S8). La fonction d'attribution d'instruction de parcours (S8) attribue une instruction de parcours pour amener un véhicule de transport non chargé le plus proche d'un point d'attente à se déplacer jusqu'au point d'attente.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010543776A JP5402943B2 (ja) | 2008-12-26 | 2009-11-16 | 搬送車システムおよび搬送車制御方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008-331706 | 2008-12-26 | ||
| JP2008331706 | 2008-12-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010073475A1 true WO2010073475A1 (fr) | 2010-07-01 |
Family
ID=42287135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/006105 Ceased WO2010073475A1 (fr) | 2008-12-26 | 2009-11-16 | Système de véhicule de transport et procédé de commande de véhicule de transport |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP5402943B2 (fr) |
| TW (1) | TW201027290A (fr) |
| WO (1) | WO2010073475A1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016081378A (ja) * | 2014-10-20 | 2016-05-16 | 村田機械株式会社 | 走行車システム |
| CN111902784A (zh) * | 2018-05-31 | 2020-11-06 | 村田机械株式会社 | 搬送系统 |
| CN112639649A (zh) * | 2018-09-04 | 2021-04-09 | 村田机械株式会社 | 输送车系统 |
| JP2023177468A (ja) * | 2022-06-02 | 2023-12-14 | シャープ株式会社 | 搬送システム、搬送方法、及び搬送プログラム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7006775B2 (ja) * | 2018-04-12 | 2022-01-24 | 村田機械株式会社 | 搬送車システム及び搬送車制御方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6299816A (ja) * | 1985-10-28 | 1987-05-09 | Hitachi Ltd | 無人搬送車の待機点決定制御方式 |
| JPH0784641A (ja) * | 1993-09-17 | 1995-03-31 | Toshiba Corp | 軌道台車自動制御装置 |
| JPH1039929A (ja) * | 1996-07-26 | 1998-02-13 | Oki Electric Ind Co Ltd | 移動体割当システムおよびその配車制御方法 |
| JPH10320048A (ja) * | 1997-05-22 | 1998-12-04 | Sogo Keibi Hosho Co Ltd | 移動体の集中監視制御システム |
| JPH11143537A (ja) * | 1997-11-07 | 1999-05-28 | Murata Mach Ltd | 無人搬送車システム |
| JP2003067054A (ja) * | 2001-08-23 | 2003-03-07 | Murata Mach Ltd | 無人搬送車システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3187351B2 (ja) * | 1997-09-09 | 2001-07-11 | 村田機械株式会社 | 無人搬送車システム |
| JP2003233422A (ja) * | 2002-02-06 | 2003-08-22 | Mitsubishi Electric Corp | 搬送システムおよびその制御方法 |
| JP2004240474A (ja) * | 2003-02-03 | 2004-08-26 | Murata Mach Ltd | 搬送車システム |
-
2009
- 2009-11-16 JP JP2010543776A patent/JP5402943B2/ja active Active
- 2009-11-16 WO PCT/JP2009/006105 patent/WO2010073475A1/fr not_active Ceased
- 2009-12-25 TW TW098145077A patent/TW201027290A/zh unknown
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6299816A (ja) * | 1985-10-28 | 1987-05-09 | Hitachi Ltd | 無人搬送車の待機点決定制御方式 |
| JPH0784641A (ja) * | 1993-09-17 | 1995-03-31 | Toshiba Corp | 軌道台車自動制御装置 |
| JPH1039929A (ja) * | 1996-07-26 | 1998-02-13 | Oki Electric Ind Co Ltd | 移動体割当システムおよびその配車制御方法 |
| JPH10320048A (ja) * | 1997-05-22 | 1998-12-04 | Sogo Keibi Hosho Co Ltd | 移動体の集中監視制御システム |
| JPH11143537A (ja) * | 1997-11-07 | 1999-05-28 | Murata Mach Ltd | 無人搬送車システム |
| JP2003067054A (ja) * | 2001-08-23 | 2003-03-07 | Murata Mach Ltd | 無人搬送車システム |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016081378A (ja) * | 2014-10-20 | 2016-05-16 | 村田機械株式会社 | 走行車システム |
| US9604657B2 (en) | 2014-10-20 | 2017-03-28 | Murata Machinery, Ltd. | Travelling vehicle system |
| CN111902784A (zh) * | 2018-05-31 | 2020-11-06 | 村田机械株式会社 | 搬送系统 |
| EP3805890A4 (fr) * | 2018-05-31 | 2022-02-23 | Murata Machinery, Ltd. | Système de transport |
| CN111902784B (zh) * | 2018-05-31 | 2023-04-07 | 村田机械株式会社 | 搬送系统 |
| CN112639649A (zh) * | 2018-09-04 | 2021-04-09 | 村田机械株式会社 | 输送车系统 |
| EP3848769A4 (fr) * | 2018-09-04 | 2022-06-08 | Murata Machinery, Ltd. | Système de véhicules de transport |
| CN112639649B (zh) * | 2018-09-04 | 2024-04-12 | 村田机械株式会社 | 输送车系统 |
| JP2023177468A (ja) * | 2022-06-02 | 2023-12-14 | シャープ株式会社 | 搬送システム、搬送方法、及び搬送プログラム |
| JP7827552B2 (ja) | 2022-06-02 | 2026-03-10 | シャープ株式会社 | 搬送システム、搬送方法、及び搬送プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2010073475A1 (ja) | 2012-05-31 |
| TW201027290A (en) | 2010-07-16 |
| JP5402943B2 (ja) | 2014-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI829045B (zh) | 倉儲機器人、其控制方法、其控制裝置、調度伺服器及儲存媒體 | |
| CN112198880B (zh) | 一种agv任务分配方法、物流分拣方法及系统 | |
| CN115237137B (zh) | 一种多agv调度与协同路径规划方法和装置 | |
| US20090000505A1 (en) | Transportation Vehicle System | |
| CN112214024B (zh) | 一种agv任务分配方法、物流分拣方法及系统 | |
| US20140249667A1 (en) | Processing Facility | |
| JP7263118B2 (ja) | 走行指令割付方法、コントローラ、及び当該コントローラを備える搬送システム | |
| JP2020190915A (ja) | 走行決定方法、コントローラ、及び当該コントローラを備える走行システム | |
| JP5402943B2 (ja) | 搬送車システムおよび搬送車制御方法 | |
| JP7276595B2 (ja) | 自動倉庫システム、及び、自動倉庫システムの制御方法 | |
| JP4143828B2 (ja) | 搬送台車システム | |
| JP2010160696A (ja) | 搬送車システム | |
| JP5309814B2 (ja) | 搬送車システム | |
| KR20110091020A (ko) | 주행차 시스템 | |
| JP2013035670A (ja) | 搬送車システム | |
| JP2003285906A (ja) | 搬送システム | |
| JP2001344018A (ja) | 無人搬送車システム | |
| JPH1185277A (ja) | 無人搬送車システム | |
| JP4016410B2 (ja) | 搬送台車システム | |
| JP7302536B2 (ja) | 倉庫設備の制御システム及び制御方法 | |
| JP2019151474A (ja) | 搬送システム及び搬送方法 | |
| JP7790375B2 (ja) | 制御システム | |
| CN112183850A (zh) | 路线规划方法、装置、设备和存储介质 | |
| JP7658185B2 (ja) | 搬送車システム | |
| JP2024024922A (ja) | 搬送車システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09834291 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE1 | Request for preliminary examination filed after expiration of 19th month from priority date (pct application filed from 20040101) | ||
| ENP | Entry into the national phase |
Ref document number: 2010543776 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 09834291 Country of ref document: EP Kind code of ref document: A1 |