WO2012105603A1 - Dispositif d'application de tension pour trame - Google Patents
Dispositif d'application de tension pour trame Download PDFInfo
- Publication number
- WO2012105603A1 WO2012105603A1 PCT/JP2012/052254 JP2012052254W WO2012105603A1 WO 2012105603 A1 WO2012105603 A1 WO 2012105603A1 JP 2012052254 W JP2012052254 W JP 2012052254W WO 2012105603 A1 WO2012105603 A1 WO 2012105603A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- weft
- passage
- tension applying
- deformed
- gripping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images
















Classifications
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03D—WOVEN FABRICS; METHODS OF WEAVING; LOOMS
- D03D47/00—Looms in which bulk supply of weft does not pass through shed, e.g. shuttleless looms, gripper shuttle looms, dummy shuttle looms
- D03D47/28—Looms in which bulk supply of weft does not pass through shed, e.g. shuttleless looms, gripper shuttle looms, dummy shuttle looms wherein the weft itself is projected into the shed
- D03D47/30—Looms in which bulk supply of weft does not pass through shed, e.g. shuttleless looms, gripper shuttle looms, dummy shuttle looms wherein the weft itself is projected into the shed by gas jet
- D03D47/3066—Control or handling of the weft at or after arrival
- D03D47/308—Stretching or holding the weft
Definitions
- the present invention relates to a weft tension applying device that applies tension to a weft thread inserted.
- the weft tension applying device in order to apply an appropriate tension to the weft, for example, there is a device that captures the weft by blowing air from a stretch nozzle into the weft capturing pipe (see, for example, Japanese Patent Laid-Open No. 10-204751). ).
- the injection of the stretch nozzle is started before the front end of the weft reaches the weft introduction recess on the opening side of the weft catching pipe, and is stopped just before the beating.
- the present invention has an object to obtain a weft tension applying device capable of applying an appropriate tension to a weft while suppressing air consumption in consideration of the above facts.
- the weft tension applying device is arranged on the downstream side in the weft insertion direction of the weft with respect to the weft insertion passage of the deformed kite and is fixed on the sley, and is surrounded by a wall surface.
- an insertion passage through which the tip of the weft inserted is inserted, a pressing member capable of gripping the tip of the weft between the inner surface of the insertion passage, and the weft by operating the pressing member
- An air cylinder mechanism that grips the tip of the weft, and a weft gripping mechanism that is fixed to the loom frame and is gripped by the weft gripping mechanism by the tip of the weft and in the strike direction of the deformed wrinkle
- a tension applying member that is in contact with the weft between the deformed scissors and the weft holding mechanism and applies a tension to the weft by relative displacement with the deformed scissors.
- the weft gripping mechanism portion is disposed on the downstream side in the weft insertion direction of the deformed kite with respect to the weft insertion passage of the deformed kite and is fixed on the sley. .
- this weft gripping mechanism portion an insertion path surrounded by a wall surface is formed, the tip of the weft thread inserted is inserted into the insertion path, and the pressing member inserts the tip of the weft thread into the inner surface of the insertion path.
- the air cylinder mechanism operates the pressing member to grip the tip of the weft.
- the tension applying member is fixed to the loom frame, and when the leading end of the weft is gripped by the weft gripping mechanism and when the deformed kite swings in the strike direction, the deformed kite and the weft gripping mechanism A tension is applied to the weft by contact with the weft and relative deformation with the deformed kite. For this reason, air is consumed only when the weft is gripped.
- the insertion passage has an opening area of the inlet portion set equal to or greater than a passage cross-sectional area of the weft insertion passage of the deformed rod.
- the passage cross-sectional area is formed so as to gradually decrease from the inlet portion side toward the portion side that grips the tip portion of the weft.
- the opening area of the insertion portion is set to be equal to or larger than the passage cross-sectional area of the weft insertion passage of the deformed rod, the front end of the weft The part can smoothly enter the insertion path from the weft insertion path of the deformed rod. Further, since the insertion passage is formed so that the passage cross-sectional area gradually decreases from the inlet side toward the portion where the tip of the weft is gripped, the position where the tip of the weft is gripped in the insertion passage It is possible to smoothly enter the direction and suppress the operation stroke of the pressing member.
- the tension applying member is a direction from the pre-weaving side to the space between the deformed kite and the weft holding mechanism.
- a guide portion that extends in the vertical direction and guides the contact portion of the weft thread in the vertical direction with respect to the height position of the weft insertion passage of the deformed kite when the deformed kite swings in the striking direction. I have.
- the guide portion of the tension applying member contacts the weft when the deformed kite swings in the striking direction, and the contact portion of the weft is used as the weft of the deformed kite. Guiding in the vertical direction with respect to the height position of the insertion passage. As a result, the weft is stretched and tension is applied to the weft.
- the tension applying member extends in the direction from the pre-weaving side to the space between the deformed kite and the weft gripping mechanism, the tip of the weft is inserted into the weft gripping mechanism when the deformed kite swings.
- the air flow for weft insertion Enters the insertion path of the weft gripping mechanism portion without being blocked by the tension applying member separated to the front side of the weave (without colliding). For this reason, even if a tension applying member is provided for applying tension to the weft, smooth weft insertion can be performed.
- the weft tension applying device according to the third aspect, wherein the tension applying member is provided continuously on the front side of the guide portion and in the swinging direction of the deformed rod. An arcuate part formed in an arcuate shape is provided.
- the arcuate portion of the tension applying member is provided on the pre-weaving side continuously to the guide portion and is circular along the swinging direction of the deformed rod. Since it is formed in an arc shape, when the weft is in contact with the arc-shaped portion, the amount of stretch of the weft is kept constant even when the position of the deformed wrinkles is changed by swinging.
- the width dimension of the distal end portion of the pressing member when viewed in the insertion direction of the insertion path is It is set larger than the minimum width dimension of the insertion passage.
- the width dimension of the distal end portion of the pressing member is set to be larger than the minimum width dimension of the insertion path when viewed in the insertion direction of the insertion path.
- the weft yarn in the passage can be gripped more reliably.
- the pressing member has a diameter larger than that of the distal end portion continuously from the distal end portion thereof.
- a small diameter portion is formed, and at least a part of the small diameter portion is disposed in the insertion passage when the pressing member grips the tip of the weft between the inner surface of the insertion passage.
- the small-diameter portion of the pressing member is set to have a smaller diameter than the distal end portion continuously to the distal end portion of the pressing member, and the pressing member is the weft yarn.
- the tip end portion of the pressing member is gripped between the inner surface of the insertion passage, at least part of the small diameter portion of the pressing member is disposed in the insertion passage. A gap is formed between them. For this reason, even if the air flow to be inserted in the weft holding state enters the insertion path, the backflow can be suppressed, and the weft holding performance is further stabilized.
- a plurality of the tension applying members are juxtaposed along the weft insertion direction of the weft, Each tension applying member is in contact with the weft when swinging the deformed kite in the striking direction, and guides the contact portion of the weft in the vertical direction with respect to the height position of the weft insertion passage of the deformed kite, The guide direction is set upside down from other adjacent tension applying members.
- a plurality of tension applying members are juxtaposed along the weft insertion direction of the wefts, and each tension applying member is arranged in the direction in which the deformed wrinkles are beaten.
- the contact portion of the weft is guided in the vertical direction with respect to the height position of the weft insertion passage of the deformed rod, and the guide direction is set upside down with other adjacent tension applying members. Therefore, the amount of weft stretch can be easily set large.
- the weft insertion path of the deformed rod is adjacent to the downstream side in the weft insertion direction of the weft.
- the ejection port is provided opposite to the detection surface of the weft detection sensor for detecting the weft and the exhaust air supplied to the air cylinder mechanism is used for the ejection.
- An air passage portion is formed for ejection from the outlet.
- the spout is provided adjacent to the downstream side in the weft insertion direction of the weft in the weft insertion passage of the deformed kite and the outlet is used for detecting the weft.
- the exhaust air that is supplied to and used by the air cylinder mechanism is ejected from the ejection port toward the weft detection sensor through the air passage portion. For this reason, the weft detection sensor is cleaned, and the reliability of the weft detection sensor is ensured.
- the tension applying member is driven in a vertical direction and a weft inserting direction by driving the motor.
- the loom frame is provided with a moving mechanism for moving in an orthogonal and horizontal direction.
- the loom frame is provided with a moving mechanism that moves the tension applying member in the vertical direction and the horizontal direction perpendicular to the weft inserting direction of the weft by driving the motor. Since it is provided, it is easy to set the position of the tension applying member according to the type of weft and the weft insertion condition.
- the tip of the weft is gripped between the pressing member in the insertion path.
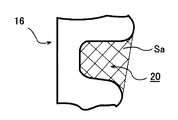
- the relationship between the passage cross-sectional area Sb of the region and the passage cross-sectional area Sa of the weft insertion passage of the deformed rod is set to 0.2Sa ⁇ Sb ⁇ 0.7Sa.
- the passage cross-sectional area Sb of the portion where the tip of the weft is gripped with the pressing member in the insertion passage and the passage breakage of the weft insertion passage of the deformed kite Since the relationship with the area Sa is set to 0.2Sa ⁇ Sb ⁇ 0.7Sa, the stroke of the pressing member is ensured while ensuring ease of insertion when the weft is inserted toward the gripping position in the insertion path. The response is good because of short.
- the weft tension applying device according to the present invention has an excellent effect that an appropriate tension can be applied to the weft while suppressing air consumption.
- tensile_strength provision apparatus which concerns on the 2nd Embodiment of this invention in the tension
- tensile_strength provision apparatus which concerns on the 2nd Embodiment of this invention.
- tensile_strength provision apparatus which concerns on the 6th Embodiment of this invention.
- FIGS. 1 to 4B A weft tension applying device according to a first embodiment of the present invention will be described with reference to FIGS. 1 to 4B.
- an arrow FR shown as appropriate indicates the weaving side of the loom
- an arrow UP indicates the upper side of the loom
- an arrow IN indicates the weft insertion direction of the weft.
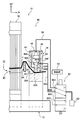
- FIG. 1 is a perspective view showing a state in which the weft tension applying device 30 is mounted on the loom 10 (only a part of which is shown in the drawing).
- the loom 10 includes a sley 12 extending in the left-right direction when viewed from the front.
- the sley 12 is swingable about a left-right axis of the loom 10 (see the arrow A direction), and a groove 12A is formed on the upper surface side along the longitudinal direction.
- the groove portion 12 ⁇ / b> A of the sley 12 the lower end portion of the deformed rod 16 is fastened and fixed by the wedge member 14. That is, the deformation rod 16 is erected and fixed on the sley 12 and can swing with the sley 12.
- the deformed kite 16 includes a plurality of kites 18 whose longitudinal direction is the standing direction, and these kites 18 are arranged side by side in the left-right direction of the loom 10.
- the wing 18 is formed with a concave guide hole 18 ⁇ / b> A that opens to the front side of the loom 10.
- These guide holes 18 ⁇ / b> A form a weft insertion passage 20 that communicates with the loom 10 in the left-right direction.
- the weft insertion passage 20 includes a plurality of sub-nozzles 22 for weft insertion (only one is shown in the drawing) supplied from the main nozzle for weft insertion (not shown) on the left side of the loom 10 when viewed from the front. It is a passage that flies by relay injection action.
- the weft Y is drawn out from a winding portion in a weft storage device (not shown) on the left side of the loom 10 when viewed from the front. Further, the weft Y is injected and supplied and then stopped by a weft locking pin (not shown) on the yarn supply side (left side in FIG. 1), so that the supply amount (the length of the weft Y) at each weft insertion becomes constant. ing.
- a weft detection sensor 24 (weft detector) that is used for detecting the weft Y adjacent to the downstream side in the weft insertion direction of the weft Y in the weft insertion passage 20 of the deformed kite 16 is disposed on the front side of the deformed kite 16. .
- the weft detection sensor 24 is erected and fixed on the front side of the sley 12, and is disposed between the ground warp T1 for forming the woven fabric W1 and the ear thread T2 for forming the discarded ear W2.
- This weft detection sensor 24 has a detection area in the weft insertion path 20 with its detection surface facing the weft insertion path 20 and detects whether or not the weft Y has reached in the weft insertion path 20. ing.
- the weft detection sensor 24 is connected to a control unit 62 (illustrated as a block in the drawing) and outputs a detection result to the control unit 62.
- a weft grasping block 34 of the weft grasping mechanism portion 32 is disposed with a slight gap between the deformation rod 16 and the weft insertion passage 20.
- the weft grip block 34 of the weft grip mechanism 32 is fixed on the sley 12.
- the weft gripping mechanism 32 constitutes a part of the weft tension applying device 30, and an insertion passage 38 through which the tip of the weft Y inserted is inserted is formed in the weft gripping block 34. .
- the insertion passage 38 is formed so as to be surrounded by a wall surface, and the opening area of the inlet portion 38A is equal to or larger than the passage cross-sectional area of the weft insertion passage 20 of the deformed rod 16 (in this embodiment, as an example, about
- the weft introduction passage 40 is set so that the cross-sectional area of the passage gradually decreases (squeezes) from the inlet portion 38A side to a portion (details will be described later) side that grips the tip of the weft Y. Is formed.
- a rectangular weft gripping passage 42 is formed in the insertion passage 38 continuously with the tapered weft introduction passage 40 in the sectional view of FIG. 3.
- the open passage 43 on the downstream side of the weft gripping passage 42 has a taper shape spreading toward the end, and has a shape in which the passage cross-sectional area is gradually enlarged.
- the weft introduction passage 40, the weft gripping passage 42, and the release passage 43 are on an extension line of the weft insertion passage 20 of the deformed kite 16, and they constitute a weft guide passage 25 together with the weft insertion passage 20 of the deformation kite 16. .
- An air cylinder mechanism 44 is disposed above the weft gripping block 34.
- the cylinder 46 of the air cylinder mechanism 44 is hollow inside, and a stopper 48 is press-fitted into the upper opening of the cylinder 46.
- a weft grip pin 50 as a pressing member is disposed inside the cylinder 46.
- the weft gripping pin 50 is configured such that a short cylindrical piston portion 50P is coaxially and integrally provided at one axial end portion (the upper end portion in the present embodiment) of a pin body 50H having a small diameter and a substantially round bar shape.
- the internal space of the cylinder 46 is divided into two chambers by a piston portion 50P.
- the front end 50A side of the pin main body 50H of the weft gripping pin 50 is disposed in the weft gripping passage 42 through a part of the bottom wall portion 46A of the cylinder 46 and the weft gripping block 34.
- a communication hole 52A formed in the shaft core portion of the bottom wall portion 46A and penetrating through the tip 50A side of the pin main body 50H has a larger diameter than the pin main body 50H, and the weft gripping block 34 has a communication hole 52A.
- a communication hole 52B that communicates with the weft holding passage 42 is formed coaxially and with the same diameter as the communication hole 52A.
- the weft gripping pin 50 can grip the front end portion of the weft Y between the inner surface (inner wall surface) of the weft gripping passage 42 (insertion passage 38), and the air cylinder mechanism 44 has the weft gripping pin 50. Is operated to grip the tip of the weft Y.
- the relationship between the passage cross-sectional area Sb of the portion of the insertion passage 38 where the tip of the weft Y is gripped between the weft gripping pin 50 and the passage cross-sectional area Sa of the weft insertion passage 20 of the deformed rod 16 is 0.2 Sa. It is preferable that ⁇ Sb ⁇ 0.7Sa is set. In this embodiment, the passage sectional area Sb of the weft gripping passage 42 is about 30% of the passage sectional area Sa of the weft insertion passage 20.
- FIGS. 4A and 4B show the lower portion of the weft gripping pin 50 and the weft gripping passage 42.
- FIG. As shown in FIGS. 4A and 4B, the width dimension 50W of the distal end portion 50A of the weft gripping pin 50 when viewed in the insertion direction of the insertion passage 38 is the insertion direction of the portion that grips the distal end portion of the weft Y in the insertion passage 38. It is set to be larger than the width dimension (38 W) at the front and rear portions.
- the width dimension 50W of the tip 50A of the weft gripping pin 50 as viewed in the insertion direction of the insertion path 38 is set to be larger than the minimum width dimension 38W of the insertion path 38.
- the weft grip pin 50 is formed with a small-diameter portion 50B having a diameter smaller than that of the tip portion 50A, continuing from the tip portion 50A.
- the weft gripping pin 50 grips the tip of the weft Y between the inner surface (inner wall surface) of the weft gripping passage 42 (insertion passage 38), at least a part of the small diameter portion 50B is inserted into the weft gripping passage 42 (insertion). It is set to be disposed in the passage 38).
- a compression coil spring 54 (“return spring”, in the broad sense “attached” between the bottom wall portion 46A of the cylinder 46 and the piston portion 50P is provided on the outer peripheral side of the weft gripping pin 50. Elements which are grasped as “force members” are wound. One end portion (lower end portion) of the compression coil spring 54 is abutted and locked to the bottom wall portion 46A of the cylinder 46, and the other end portion (upper end portion) is abutted and locked to the end surface (bottom surface) of the piston portion 50P. ing. Therefore, the compression coil spring 54 can press and urge the piston portion 50P in the direction (in FIG.
- the weft gripping pin 50 cannot grip the tip of the weft Y between the inner surface of the weft gripping passage 42 (insertion passage 38) when the piston portion 50P is not pressurized from the upper side ( It is held at a non-gripping position (not shown).
- One end of a tubular air tube 56 is connected to the upper end of the weft holding block 34 to supply air to the upper chamber of the cylinder 46 or to discharge air from the upper chamber of the cylinder 46.
- the other end of the air tube 56 is connected to either the air supply port 58A or the exhaust port 58B of the three-port solenoid valve 58.
- the cylinder 46 can be connected to an air supply source 60 (blocked in the drawing) via an air tube 56 and an air supply port 58A of the three-port solenoid valve 58.
- the 3-port solenoid valve 58 is connected to the control unit 62.
- the control unit 62 performs control so as to switch the port of the three-port solenoid valve 58 connected to the other end of the air tube 56 at a preset setting timing, and controls the three-port solenoid valve 58, whereby the weft yarn
- the direction of raising and lowering of the grip pin 50 can be controlled. Control is performed so that when the leading end of the weft Y reaches the weft gripping passage 42, the weft gripping pin 50 grips the leading end of the weft Y between the inner surface of the weft gripping passage 42 (insertion passage 38).
- the control unit 62 may control to switch the port of the three-port solenoid valve 58 connected to the other end of the air tube 56 at a predetermined timing according to the swing angle of the sley 12. Even if it is controlled to switch the port of the three-port solenoid valve 58 connected to the other end of the air tube 56 at a predetermined timing calculated based on the timing of the weft Y injection supply and the flying speed of the weft Y. Good.
- a tension applying arm 64 as a tension applying member is installed on the front side of the loom 10 with respect to the space between the deformed kite 16 and the weft gripping block 34.
- the tension applying arm 64 has a base end portion 64A fixed to the mounting base 28 by fastening with a screw 29, and is fixed to the loom frame 26 via the mounting base 28, and the deformed kite 16 and the weft gripping mechanism portion 32 from the pre-weaving side. It is extended in the direction toward.
- the loom frame 26 constitutes a stationary portion that is not displaced even when the deformation rod 16 is swung.
- the tension applying arm 64 is in a state in which the tip of the weft Y is gripped by the weft gripping mechanism portion 32 and between the deformed scissors 16 and the weft gripping mechanism portion 32 when the deformed scissors 16 swing in the strike direction ( Between the downstream end in the weft insertion direction of the deformed kite 16 and the upstream end in the weft inserting direction of the weft gripping mechanism portion 32), a tension is applied to the weft Y by relative displacement with the deformed kite 16 in contact with the weft Y. (See FIG. 2).
- the tension applying arm 64 is formed in a thin plate shape, and the left and right direction of the loom 10 is disposed in the plate thickness direction, the tip end portion 64B is formed in an arc shape, and the upper side portion on the tip end portion 64B side is in the longitudinal direction.
- the guide portion 64C is gently inclined upwardly toward the base end portion 64A. The guide portion 64C comes into contact with the weft Y when the deformation rod 16 swings in the beating direction and guides the contact portion of the weft Y upward with respect to the height position of the weft insertion passage 20 of the deformation rod 16. (See FIGS. 2 and 3). Further, in the present embodiment, the portion of the upper side portion of the tension applying arm 64 that continues to the side opposite to the tip portion 64B side of the guide portion 64C extends substantially horizontally.
- weft Y When weft Y is supplied (injected) from a main nozzle for weft insertion (not shown) on the left side of the loom 10 shown in FIG. 1, a plurality of sub-nozzles 22 for weft insertion (only one is shown in the figure).
- the weft Y travels through the weft insertion passage 20 by the relay injection action.
- the weft detection sensor 24 detects the arrival of the weft Y, and the detection result is output to the control unit 62.
- the front end side of the weft Y is inserted into the insertion passage 38 of the weft gripping block 34 by the injection action (jet flow) of the sub nozzle 22 installed on the downstream side, and passes through the weft introduction passage 40 in the insertion passage 38. Thereafter, at the stage of passing through the weft holding passage 42, the base end side of the weft Y is stopped by a weft locking pin (not shown) on the yarn supply side (left side in FIG. 1), and the leading end of the weft Y stops.
- the port of the 3-port solenoid valve 58 connected to the air tube 56 shown in FIG. 3 is switched from the exhaust port 58B to the air supply port 58A.
- the weft gripping pin 50 is pushed down by this atmospheric pressure.
- the weft grip pin 50 is operated by the air cylinder mechanism 44, whereby the tip of the weft Y is gripped between the tip 50 A of the weft grip pin 50 and the inner surface of the weft grip passage 42.
- the tension applying arm 64 is in contact with the deformed rod 16 and the weft holding mechanism 32.
- the weft Y is supported by the tension applying arm 64, and the contact portion of the weft Y shown in FIG. While being guided upward with respect to the height position of the insertion passage 20, a part of the weft Y is bent into an inverted V shape.
- the weft Y is supported by the tension applying arm 64 and is given a tension by the relative displacement between the tension applying arm 64 and the deformation rod 16.
- the inverted V-shape of the weft Y described above is the upper wall of the weft insertion passage 20 of the deformed rod 16 shown in FIG. 3, the weft gripping position by the weft gripping pin 50, and the tension applying arm 64.
- the upper side portion serves as a fulcrum
- the upper end of the inlet portion 38A of the weft introduction passage 40 also serves as a fulcrum, and tension is applied to the weft Y using these as fulcrums.
- the control of the control unit 62 stops the energization of the three-port solenoid valve 58 so that the weft Y gripping force by the weft gripping pin 50 is loosened, and the air tube 56 is connected at the same time.
- the port of the 3-port solenoid valve 58 is switched from the air supply port 58A to the exhaust port 58B, and high-pressure air is discharged from the exhaust port 58B.
- high-pressure air is consumed only when the weft Y is gripped, and no air is consumed when maintaining the tension of the weft Y.
- the tip of the weft is at the holding position.
- Contrast structure for example, the weft tension applying device according to the above-mentioned Japanese Patent Application Laid-Open No. 10-204751
- a uniform tension state is obtained over the entire length of the weft by the tension applying action on the yarn feeding side and the counter yarn feeding side, so that a high-quality woven fabric can be woven.
- the fulcrum of the tension applying arm 64 when applying tension to the weft Y is the upper side, and the guide part 64C (see FIG. 1) on the upper side of the tension applying arm 64 deforms the contact part of the weft Y. Since the 16 weft insertion passages 20 are guided upward with respect to the height position of the 16 weft insertion passages 20, there is no possibility that the weft Y is detached from the tension applying arm 64 when tension is applied to the weft Y.
- the inserted weft Y is basically removed from the path.
- the weft Y can be stably gripped without coming off.
- the weft Y is guided into the insertion passage 38 using the injection action of the sub nozzle 22, but the opening area of the inlet portion 38A is deformed in the insertion passage 38. Since the cross-sectional area of the sixteen weft insertion passages 20 is set to be about 20% larger, the tip of the weft Y can smoothly enter the insertion passage 38 from the weft insertion passage 20 of the deformed rod 16.
- the insertion passage 38 is formed so that the cross-sectional area of the passage gradually decreases from the inlet portion 38A side toward the portion that grips the front end portion of the weft Y, the front end portion of the weft Y during flight is It is possible to smoothly enter the weft holding passage 42. Further, since the cross-sectional area of the weft gripping passage 42 is about 30% of the cross-sectional area of the weft insertion passage 20, it is possible to suppress the operating stroke of the weft gripping pin 50. As a result, the loom 10 has a high speed. In addition to being able to handle weft insertion, it is also advantageous in terms of durability.
- the passage cross-sectional area Sa (shaded portion) of the weft insertion passage (20) of the deformed kite (16) shown in FIG. 15A and the weft gripping passage (42) of the weft gripping block (34) shown in FIG. 15B.
- a preferable range as a ratio (passage cross-sectional area ratio) to the cross-sectional area Sb (shaded portion) of the above will be described.
- FIG. 13 shows the cross-sectional area ratio between the weft insertion passage (20) of the deformed kite (16) and the weft gripping passage (42) of the weft gripping block (34) and the response time of the weft gripping pin 50 to this ratio.
- the relationship is shown in a graph.
- the cross-sectional area Sa of the weft insertion passage (20) of the deformed rod (16) is a predetermined value (constant)
- the cross-sectional area Sb of the weft gripping passage (42) of the weft gripping block (34) is The result when variable is shown.
- the response time of the weft gripping pin (50) becomes longer as the passage sectional area ratio increases. This is because the stroke of the weft gripping pin (50) becomes longer as the passage cross-sectional area ratio becomes larger.
- the 3-port solenoid valve (58) that supplies high-pressure air from one side of the weft gripping pin (50) has a slower response time than the 5-port solenoid valve that supplies from both sides of the weft gripping pin (50).
- the air consumption and the solenoid valve driving power can be suppressed, and the initial cost is low. In other words, which of the 3-port solenoid valve (58) and the 5-port solenoid valve is applied is determined according to necessity.
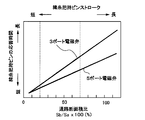
- FIG. 14 shows the ratio of the cross-sectional area of the weft insertion passage (20) of the deformed kite (16) and the weft gripping passage (42) of the weft gripping block (34) and the weft to the weft gripping passage (34).
- the relationship with the ease of entering (Y) is shown in a graph.
- the cross-sectional area Sa of the weft insertion passage (20) of the deformed rod (16) is set to a predetermined value (constant), and the weft gripping of the weft gripping block (34) is performed.
- the results when the passage cross-sectional area Sb of the passage (42) is variable are shown.
- FIG. 14 it can be seen that the weft (Y) is less likely to enter the weft gripping passage (42) as the passage cross-sectional area ratio is smaller in any thickness of the weft (Y).
- the passage cross-sectional area ratio in which the response time of the weft gripping pin (50) is short and the weft (Y) easily enters the weft gripping passage (42) is in the range of 20% to 70%.
- the relationship with the cross-sectional area Sa is preferably set to 0.2Sa ⁇ Sb ⁇ 0.7Sa.
- the weft tension applying device 30 has a width dimension 50W of the distal end portion 50A of the weft gripping pin 50 as viewed in the insertion direction of the insertion path 38. Therefore, the weft Y in the insertion passage 38 can be more reliably gripped regardless of the position in the width direction of the weft Y.
- the weft grip pin 50 is formed with a small diameter portion 50B having a diameter smaller than the tip portion 50A continuously from the tip portion 50A, and the weft grip pin 50 passes the tip portion of the weft Y to the weft grip passage 42 ( 4B because at least a part of the small diameter portion 50B is set to be disposed in the weft gripping passage 42 (insertion passage 38) in the state of being gripped between the inner surface of the insertion passage 38).
- a gap B is formed between the small diameter portion 50B and the weft gripping passage 42 (insertion passage 38). For this reason, even if an air flow to be inserted by wetting of the sub-nozzle 22 (see FIG.
- the tension applying arm 64 is extended from the pre-weaving side in a direction toward the space between the deformed kite 16 and the weft holding mechanism 32, so that when the deformed kite 16 is swung,
- the tip of the weft Y is inserted into the insertion path 38 of the weft gripping mechanism 32 (in other words, before the weft Y comes into contact with the guide portion 64C of the tension applying arm 64 and the tip of the weft Y is the weft
- the jet (airflow) from the sub-nozzle 22 for weft insertion is not blocked (but does not collide) by the tension applying arm 64 separated to the pre-weaving side.
- the weft tension applying device 30 As described above, according to the weft tension applying device 30 according to this embodiment, it is possible to apply an appropriate tension to the weft Y while suppressing air consumption.
- FIG. 5 is a longitudinal sectional view of the main part of the weft tension applying device 70 according to the present embodiment
- FIG. 6 shows a tension applying arm 64 as a tension applying member in the weft tension applying device 70.
- 72 are shown in a perspective view.
- the weft tension applying device 70 is provided with two tension applying arms 64 and 72, and the weft tension applying device 30 according to the first embodiment (see FIG. 1 and the like). Is different.
- Other configurations are substantially the same as those of the first embodiment. Therefore, components that are substantially the same as those of the first embodiment are denoted by the same reference numerals and description thereof is omitted.
- FIG. 6 the illustration of parts other than the characteristic part of the present embodiment is partially omitted.
- the tension applying arms 64 and 72 are arranged in parallel along the weft insertion direction of the weft Y at a certain interval. Similar to the tension applying arm 64, the tension applying arm 72 adjacent to the tension applying arm 64 is installed on the front side of the loom 10 with respect to the space between the deformed rod 16 and the weft gripping block 34.
- the tension applying arm 72 has a base end portion 72A fixed to the attachment base 28 with a screw 29 and fixed to the loom frame 26 via the attachment base 28. It extends in the direction toward the part 32.
- the tension applying arm 72 is in a state in which the tip of the weft Y is gripped by the weft gripping mechanism section 32 and between the deformed scissors 16 and the weft gripping mechanism section 32 when the deformed scissors 16 swing in the strike direction ( Between the downstream end in the weft insertion direction of the deformed kite 16 and the upstream end in the weft inserting direction of the weft gripping mechanism portion 32), a tension is applied to the weft Y by relative displacement with the deformed kite 16 in contact with the weft Y. ing.
- the tension applying arm 72 is attached in a state where a member having the same shape as the tension applying arm 64 is turned upside down.
- the distal end portion 72B is formed in an arc shape, and the lower side portion on the distal end portion 72B side is in the longitudinal direction.
- the guide portion 72C is gently inclined downwardly toward the base end portion 72A (with a gentle downward slope).
- the guide portion 72C contacts the weft Y when the deformation rod 16 swings in the strike direction, and guides the contact portion of the weft Y downward with respect to the height position of the weft insertion passage 20 of the deformation rod 16. It has become.
- the lower side portion of the guide portion 72C opposite to the distal end portion 72B side extends substantially horizontally in the present embodiment.
- each of the tension applying arms 64 and 72 is in contact with the weft Y when the deformation rod 16 swings in the beating direction and the contact portion of the weft Y with respect to the height position of the weft insertion passage 20 of the deformation rod 16.
- the guide direction is set upside down with respect to other adjacent tension applying members (72, 64).
- the deformation stroke of the weft Y can be easily lengthened (that is, the weft Y can be easily stretched). This is effective when a stretch yarn having elasticity is used for the weft Y.
- three or more tension applying arms may be arranged in parallel.
- FIG. 7 shows a main part of the weft tension applying device 80 according to the present embodiment in a longitudinal sectional view in front view.
- the weft tension applying device 80 includes a 5-port solenoid valve 82 in place of the 3-port solenoid valve 58, so that the weft tension applying device 30 (FIG. 1, etc.) according to the first embodiment is provided.
- Other configurations are substantially the same as those of the first embodiment. Therefore, components that are substantially the same as those of the first embodiment are denoted by the same reference numerals and description thereof is omitted.
- the opening area of the inlet portion 38A of the insertion passage 38 (weft introduction passage 40) shown in FIG. 7 is set to be 50% larger than the passage cross-sectional area of the weft insertion passage 20 of the deformed kite 16. Further, the cross-sectional area of the weft gripping passage 42 is set to about 50% of the cross-sectional area of the weft introduction passage 40.
- One end of an air tube 56 is connected to the upper end of the weft grip block 34 to supply air to the upper chamber of the cylinder 46 or to discharge air from the upper chamber of the cylinder 46.
- the other end of the tube 56 is connected to either the air supply port 82A or the exhaust port 82C of the 5-port solenoid valve 82.
- one end of a tubular air tube 56A is connected to the side of the weft grip block 34 to supply air to the lower chamber of the inner space of the cylinder 46 or to discharge air from the lower chamber of the inner space of the cylinder 46.
- the other end of the air tube 56A is connected to either the exhaust port 82B or the air supply port 82D of the 5-port solenoid valve 82.
- the cylinder 46 can be connected to the air supply source 60 via the air tube 56 and the air supply port 82A of the 5-port solenoid valve 82, and the air supply port 82D of the air tube 56A and the 5-port solenoid valve 82 is connected to the cylinder 46. Via the air supply source 60.
- the 5-port solenoid valve 82 is connected to the control unit 62.
- the control unit 62 performs control so as to switch the port of the 5-port solenoid valve 82 connected to the other end of the air tubes 56, 56A at a preset setting timing, and controls the 5-port solenoid valve 82.
- the direction of lifting and lowering of the weft gripping pin 84 as a pressing member can be controlled.
- the timing for switching the port of the 5-port solenoid valve 82 is the same as in the first embodiment.
- the weft gripping pin 84 has the same configuration as the weft gripping pin 50 (see FIG. 4A) in the first embodiment except that the small diameter portion 50B (see FIG. 4A) is not formed. That is, the weft gripping pin 84 is configured such that a short cylindrical piston portion 84P is coaxially and integrally provided at one end portion in the axial direction of a pin body 84H having a small diameter and a substantially round bar shape.
- the same components as those of the weft gripping pin 50 (see FIG. 4A) in the first embodiment are denoted by the same reference numerals.
- the compression coil spring 54 (see FIG. 3) in the first embodiment is not disposed inside the cylinder 46.
- substantially the same operation and effect as those of the first embodiment described above can be obtained, and high operation performance can be ensured even if a very thick yarn is used for the weft Y.
- the weft gripping passage of the weft Y The 5-port solenoid valve 82 is used for driving the weft gripping pin 84 although the operation stroke of the weft gripping pin 84 is increased by the amount that the cross-sectional area of the weft gripping passage 42 is large. As a result, the operation of the weft gripping pin 84 becomes faster, so that the response performance when gripping the weft Y is also ensured.
- FIG. 8 is a plan view showing a main part of the weft tension applying device 90 according to this embodiment.
- the weft tension applying device 90 is provided with an weft tension applying device according to the first embodiment in that an air passage portion 92 for ejecting air toward the weft detection sensor 24 is formed. It is different from the device 30 (see FIG. 1 etc.).
- Other configurations are substantially the same as those of the first embodiment. Therefore, components that are substantially the same as those of the first embodiment are denoted by the same reference numerals and description thereof is omitted.
- a jet nozzle 94A of a clean nozzle 94 is provided adjacent to the downstream side in the weft insertion direction of the weft Y in the weft insertion passage 20 of the deformation kite 16, and the jet port 94A is provided on the deformation kite 16A. Is arranged opposite to the detection surface 24A of the weft detection sensor 24.
- the clean nozzle 94 is attached to the back side of the deformed rod 16, and one end of an air tube 96 is connected to the base end side. The other end of the air tube 96 is connected to the exhaust port 58B of the three-port solenoid valve 58. That is, the clean nozzle 94 and the air tube 96 constitute an air passage portion 92 for ejecting the exhaust air supplied to the air cylinder mechanism 44 and used from the ejection port 94A.
- the high-pressure air discharged from the clean nozzle 94 is jetted onto the detection surface 24A of the weft detection sensor 24 through the gaps of the wings 18.
- the clean nozzle 94 By mounting the clean nozzle 94 in this way, the high-pressure air used to drive the weft gripping pin 50 is not discharged into the atmosphere wastefully, and the detection surface 24A of the weft detection sensor 24, which is easily attached to the fluff, is removed every weft insertion. Can be cleaned.
- operations and effects similar to those of the first embodiment described above can be obtained, and stable weft detection can be performed.
- FIG. 9 shows a side view action diagram for explaining the action of the weft tension applying device 100 according to the present embodiment.
- the illustration of the components on the front side in the drawing relative to the tension applying arm 102 as the tension applying member is omitted, and the deformation state of the deformed scissors 16 and a part of the weft is shown by a two-dot chain line. .
- the weft tension applying device 30 according to the first embodiment is that an arcuate portion 102A is formed on the upper side of the tension applying arm 102. ) Is different.
- Other configurations are substantially the same as those of the first embodiment. Note that components that are substantially the same as those of the first embodiment are denoted by the same reference numerals and description thereof is omitted.
- the tension applying arm 102 shown in FIG. 9 extends in a direction from the pre-weaving side to the space between the deformed kite 16 and the weft gripping mechanism portion 32 (see FIG. 1), and an arcuate portion 102A is formed on the upper side portion. Except for the points described above, the configuration is the same as that of the tension applying arm 64 (see FIG. 1) in the first embodiment.
- the arcuate portion 102A of the tension applying arm 102 is provided on the front side of the guide portion 64C, and is provided along the swinging direction of the deformed rod 16 (so as to coincide with the swinging motion trajectory). It is formed in an arc shape.
- the stretch amount of the weft Y is the position between the arcuate portion 102A and the upper wall position of the guide hole 18A.
- the arc-shaped portion 102A is formed in an arc shape along the swinging direction of the deformed rod 16 (refer to the direction of arrow A), so the position of the arc-shaped portion 102A and the top of the guide hole 18A
- the distance L1 from the wall position is constant and the amount of weft Y stretched is constant.
- the sley 12 swings. Even if the deformed wrinkle 16 changes its position (in FIG. 9, any position of reference numerals 16A, 16B, and 16C), the amount of weft Y stretched can be kept constant, so that more stable fabric quality can be obtained. .
- FIG. 10 shows a side view action diagram for explaining the action of the weft tension applying device 110 according to the present embodiment.
- the illustration of the components on the nearer side of the drawing than the tension applying arm 112 as the tension applying member is omitted, and the deformation state of the deformed scissors 16 and a part of the weft Y is shown by a two-dot chain line. Yes.
- the tension applying arm 112 is the tension applying arm 72 in the second embodiment (see FIG. 6) except that an arc-shaped portion 112A is formed on the lower side. ), And is extended in a direction from the pre-weaving side toward the space between the deformed kite 16 and the weft gripping mechanism 32 (see FIG. 1). Therefore, the same components as those of the tension applying arm 72 (see FIG. 6) are denoted by the same reference numerals and description thereof is omitted.
- the other configuration of the weft tension applying device 110 is substantially the same as that of the first embodiment.
- symbol is attached
- the arc-shaped portion 112A of the tension applying arm 112 shown in FIG. 10 is provided on the pre-weaving side continuously to the guide portion 72C, and is along the swing direction of the deformed rod 16 (coincides with the locus of the swing motion). It is formed in an arc shape.
- the amount of stretch of the weft Y is the position of the arcuate portion 112A and the position of the lower wall of the guide hole 18A.
- the arc-shaped portion 112A is formed in an arc shape along the swinging direction of the deformed rod 16 (see the arrow A direction), so that the position of the arc-shaped portion 112A and the bottom of the guide hole 18A
- the distance L2 from the wall position is constant, and the amount of weft Y stretched is constant.
- FIG. 11 shows a main part of the weft tension applying device 120 according to the present embodiment in a longitudinal sectional view in a side view.
- the weft tension applying device 120 is provided with an insertion passage 126 instead of the insertion passage 38, and the air cylinder mechanism 44 is disposed with the axial direction of the weft gripping pin 50 being in the horizontal direction.
- This is different from the weft tension applying device 30 (see FIG. 1 and the like) according to the first embodiment.
- Other configurations are substantially the same as those of the first embodiment. Therefore, components that are substantially the same as those of the first embodiment are denoted by the same reference numerals and description thereof is omitted.
- the illustration of parts other than the characteristic part of the present embodiment is partially omitted.
- an insertion passage 126 is formed through the weft grip block 122, and the insertion passage 126 is formed so that the periphery is surrounded by a wall surface.
- the inlet section 126A is circular and the passage cross-sectional area gradually decreases from the inlet section 126A side toward the portion that grips the tip of the weft Y. It is formed in a constricted tapered shape so as to be (squeezed).
- the weft gripping passage 130 constituting a part of the insertion passage 126 is formed continuously with the weft introduction passage 128, and the inner peripheral surface thereof has a cylindrical inner surface.
- the insertion passage 126 is otherwise configured in the same manner as the insertion passage 38 (see FIG. 3, etc.) (that is, the weft introduction passage 128 has the same configuration as the weft introduction passage 40 (see FIG. 3, etc.)). Is the same configuration as the weft grip passage 42 (see FIG. 3 and the like).
- the air cylinder mechanism 44 is inserted from the back side of the weft gripping block 122, and when the weft gripping pin 50 grips the weft Y between the inner surface of the weft gripping passage 130, the weft gripping pin 50 is It is configured to operate from the anti-weaving front side (right side in the figure) to the weaving front side (left side in the figure).
- the weft holding block 122 has the same configuration as the weft holding block 34 (see FIG. 1) in the first embodiment except for the above points, and is fixed on the sley 12.
- the same operations and effects as those of the first embodiment described above can be obtained. Further, by making the shapes of the weft introduction passage 128 and the weft grasping passage 130 as described above, the manufacturing cost of the weft grasping block 122 can be greatly reduced.
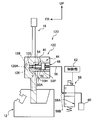
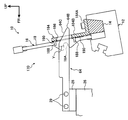
- FIG. 12 The principal part of the weft tension applying apparatus 140 which concerns on this embodiment is shown by the side view by FIG.
- the weft tension applying device 140 is different from the weft tension applying device 30 (see FIG. 1 etc.) according to the first embodiment in that the tension applying arm 64 can be moved by the moving mechanism 142.
- Other configurations are substantially the same as those of the first embodiment. Therefore, components that are substantially the same as those of the first embodiment are denoted by the same reference numerals and description thereof is omitted.
- FIG. 12 the illustration of parts other than the characteristic part of the present embodiment is partially omitted.
- the moving mechanism 142 includes a vertical column portion 144, and a rack 146 extending in the vertical direction of the loom 10 is fixed to the vertical column portion 144, and on both sides of the rack 146.
- a guide rail 148 extending in parallel with the rack 146 is formed. Stoppers 149 are provided at the upper and lower ends of the guide rail 148.
- a pinion 150 that meshes with the rack 146 is rotatably supported on the mounting base 28, and a slider 152 that is slidable (slidable) along the longitudinal direction of the guide rail 148 is fixed.
- the pinion 150 can be driven by a motor (not shown), and the mounting base 28 is raised when the motor is rotated forward, and the mounting base 28 is lowered when the motor is reversed.
- a horizontal column portion 154 that is fixed to the loom frame 26 and extends in the front-rear direction of the loom 10 is provided on the lower end side of the vertical column portion 144.
- a rack 156 is fixed along the longitudinal direction of the horizontal column portion 154, and guide rails 158 extending in parallel with the rack 156 are formed above and below the rack 156. Stoppers 159 are provided at the left and right ends of the guide rail 158.
- a pinion 160 that meshes with the rack 156 is rotatably supported on the lower end portion side of the vertical column portion 144, and a slider 162 that is slidable (slidable) along the longitudinal direction of the guide rail 158. Is fixed.
- the pinion 160 can be driven by a motor (not shown). When the motor rotates forward, the vertical column portion 144 moves to the anti-weaving front side (right side in the drawing) of the loom 10, and when the motor reverses, The column part 144 moves to the weaving front side (left side in the figure) of the loom 10.
- the moving mechanism 142 is configured to move the tension applying arm 64 in the vertical direction and in the horizontal direction perpendicular to the weft insertion direction of the weft Y by driving the motor.
- the tension applying arm 64 extends in a direction from the pre-weaving side to the space between the deformed kite 16 and the weft gripping mechanism portion 32 (see FIG. 1). It is constant.
- the same operations and effects as those of the first embodiment described above can be obtained, and the position of the tension applying arm 64 can be easily set according to the type of weft Y and the weft insertion conditions. can do.
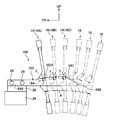
- FIG. 16 is a perspective view of the weft tension applying device 170 according to the present embodiment at the end of weft insertion.
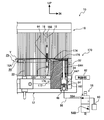
- FIG. 17 is a perspective view of the weft tension applying device 170 in the state of applying tension to the weft Y. It is shown in 18 shows a main portion of the weft tension applying device 170 in a longitudinal sectional view in front view, and FIG. 19 shows a side view of the weft tension applying device 170 cut at the position of the weft gripping passage 178.
- FIG. 20 is a side sectional view showing a state in which the weft tension applying device 170 is cut near the position where the tension applying arm 64 is disposed.
- the weft gripping block 172 is disposed on the front side of the deformed kite 16, and the mounting position in the left-right direction can be changed according to the set weaving width.
- An insertion portion 172A that fits into the guide hole 18A of the deformed rod 16 is provided at the upper end of the weft grip block 172.
- the upstream portion of the insertion portion 172A in the weft insertion direction has an outer shape in a side sectional view that is the same as the shape in a side view of the guide hole 18A. That is, no gap is formed between the portion on the upstream side in the weft insertion direction of the insertion portion 172A and the guide hole 18A to allow the jet flow from the sub nozzle 22 to pass downstream in the weft insertion direction.
- an insertion path 174 is formed at the upper end of the weft grip block 172 including the insertion portion 172A.
- the insertion passage 174 is formed so as to be surrounded by a wall surface, and the tip of the weft Y is inserted through the insertion passage 174.
- the weft introduction passage 176 constituting the upstream side of the insertion passage 174 in the weft insertion direction is formed in a substantially elliptical shape with its inlet portion 174A being long in the substantially front-rear direction of the loom 10 (direction substantially perpendicular to the paper surface of FIG. 18). (See FIG. 19).
- the weft introduction passage 176 gradually contracts from the inlet portion 174A side to the portion side (right side in the drawing) that grips the front end portion of the weft Y from the upper surface side and the back surface side (the back side of the paper surface in FIG. 18). It is formed in a shape that is squeezed (squeezed) (see FIG. 19).
- the weft gripping passage 178 constituting the downstream side in the weft insertion direction of the insertion passage 174 is formed continuously with the weft introduction passage 176 and the inner peripheral surface thereof has a cylindrical inner surface (see FIG. 19).
- a plurality of punch holes 180 are formed in the weft introduction passage 176 and the weft grip passage 178.
- the punching hole 180 passes through the weft introduction passage 176 and the weft gripping passage 178 to the weaving front side of the weft gripping block 172, and is an exhaust passage for guiding the jet flow by the sub nozzle 22 from the insertion passage 174 to the outside of the weft gripping block 172. Is forming. That is, the hole 180 has a function of suppressing the air resistance of the airflow in the insertion passage 174.
- the punch hole 180 is penetrated from the weft introduction passage 176 and the weft grip passage 178 in other directions such as the upper side, the lower side, or the anti-weaving front side (back side) of the weft grip block 172. It may be.
- the total cross-sectional area in the direction perpendicular to the penetration direction in the plurality of punch holes 180 is set to be equal to or greater than the cross-sectional area in the direction perpendicular to the extending direction in the weft holding passage 178.
- the insertion passage 174 is otherwise configured in the same manner as the insertion passage 38 (see FIG. 3 and the like) in the first embodiment (that is, the weft introduction passage 176 has the same configuration as the weft introduction passage 40 (see FIG. 3 and the like)).
- the weft grip passage 178 has the same structure as the weft grip passage 42 (see FIG. 3 and the like).
- the weft gripping block 172 is provided with an air cylinder mechanism 182.
- the air cylinder mechanism 182 is arranged such that the weft grip pin 84 (see FIG. 7) according to the third embodiment is disposed instead of the weft grip pin 50 (see FIG. 3) of the first embodiment. Except for this, the configuration is substantially the same as the air cylinder mechanism 44 (see FIG. 3) of the first embodiment.
- the air cylinder mechanism 182 operates the weft gripping pin 84 obliquely upward toward the anti-weaving front side (right side in the drawing). It has a configuration.
- the weft insertion sub-nozzle 22 is disposed adjacent to the weft gripping block 172 on the upstream side in the weft insertion direction.
- the insertion time of the weft Y into the insertion path 174 can be shortened compared to a configuration in which the sub nozzle 22 is not adjacent to the weft gripping block 172.
- a pin holder 184 is fixed on the wedge member 14 fixed to the sley 12 at a position corresponding to the tension applying arm 64.
- the mounting position of the pin holder 184 in the left-right direction of the loom 10 (direction perpendicular to the paper surface of FIG. 20) is changed together with the tension applying arm 64 according to the set weaving width.
- the pin holder 184 is L-shaped in a side view, and includes a lower wall portion 184A that is fixed to the wedge member 14 and a vertical wall portion 184B that is disposed on the back side of the deformed rod 16.
- a plate-shaped rubber member 190 is attached to the vertical wall portion 184B between the back surface of the deformed rod 16, and an opening 186 into which the portion on the tip end 64B side of the tension applying arm 64 can be inserted is formed. Yes.
- FIG. 21 shows the pin holder 184 in a front view.
- the opening 186 is formed at the center of the vertical wall 184B.
- the split pin 188 is being fixed to the vertical wall part 184B above and below the opening part 186.
- the split pin 188 protrudes to the pre-weaving side with the direction perpendicular to the vertical wall portion 184B as the axial direction (see FIG. 20).
- the split pin 188 is arranged at the upper and lower positions with the guide hole 18A of the deformed scissors 16 in between, and enters between the adjacent scissors 18 to bend the warps 18 laterally ( Elastically deformed).
- the split pin 188 forms a space in which a portion on the tip end portion 64B (see FIG. 20) side of the tension applying arm 64 can be inserted between the wings 18.
- the weft thread Y block corresponding to various weaving width settings can be obtained by changing the mounting positions of the weft grip block 172, the tension applying arm 64, and the pin holder 184 (see FIG. 20) in the left-right direction. Tension can be applied.
- the weft grip pins 50, 84 are short cylindrical piston portions at one end in the axial direction of the pin bodies 50H, 84H having a small diameter and a substantially round bar shape.
- 50P and 84P are coaxially and integrally provided.
- a piston disposed in the internal space of the cylinder of the cylinder mechanism is disposed, and the pressing member is fixed to the shaft core portion of the piston. It may be another pressing member such as a substantially round bar-like or a substantially square bar-like member.
- insertion path 38, 126, 174 is toward the site
- the cross-sectional area of the passage is formed so as to be gradually reduced, and such a configuration is preferable from the viewpoint of responsiveness of the weft gripping pins 50 and 84, but the tip of the weft is gripped from the inlet side of the insertion passage. It is also possible to adopt a configuration in which the cross-sectional area of the passage toward the portion to be fixed is constant.
- the width dimension 50W of the tip 50A of the weft gripping pin 50 as viewed in the insertion direction of the insertion path 38 is set to be larger than the minimum width dimension 38W of the insertion path 38.
- the width dimension of the tip portion of the pressing member is slightly smaller than the minimum width dimension of the insertion path when viewed in the insertion direction of the insertion path. (For example, the gap between the two may be smaller than the radius of the weft).
- the weft gripping pin 50 is formed with a small diameter portion 50B having a diameter smaller than that of the tip portion 50A continuously from the tip portion 50A, so that a reverse flow of the airflow to be inserted is inserted.
- a small diameter portion 50B having a diameter smaller than that of the tip portion 50A continuously from the tip portion 50A, so that a reverse flow of the airflow to be inserted is inserted.
- the tension applying arms 64, 72, 102, and 112 are formed in a thin plate shape and the left and right directions of the loom 10 are disposed in the plate thickness direction.
- the loom 10 is arranged with the left-right direction as the plate thickness direction, and the upper side or the lower side in contact with the weft in the front view of the loom is formed so that the central portion in the plate thickness direction is raised. Good.
- the tension applying arms 64, 72, 102, 112 are extended from the pre-weaving side in a direction toward the space between the deformed kite 16 and the weft gripping mechanism portion 32, and are sub nozzles for weft insertion.
- the tension applying member is, for example, between the deformation rod 16 and the weft holding mechanism 32.
- Other tension applying members such as a tension applying member that is provided and extends in the vertical direction may be used.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Looms (AREA)
Abstract
L'invention concerne un dispositif d'application de tension pour trame, capable d'appliquer la tension appropriée à une trame tout en limitant la quantité d'air consommée. Un composant (32) de mécanisme de maintien de trame est placé du côté aval dans la direction de chasse d'une trame (Y) par rapport à un passage (20) de chasse d'un peigne modifié (16). Dans le composant (32) de mécanisme de maintien de trame, la partie d'extrémité de la trame chassée (Y) est insérée à travers un passage (38) d'insertion, une broche (50) de maintien de trame est capable de maintenir la partie d'extrémité de la trame (Y) en coopérant avec une surface intérieure du passage (38) d'insertion, et un mécanisme (44) à vérin pneumatique actionne la broche (50) de maintien de trame pour faire en sorte qu'elle maintienne la partie d'extrémité de la trame (Y). Par ailleurs, un bras applicateur (64) de tension est fixé à un bâti (26) du métier et applique une tension à la trame (Y) du fait de son déplacement relatif par rapport au peigne modifié (16), qui se produit lorsque le peigne modifié (16) oscille dans la direction de battement du peigne modifié (16) de telle façon que le bras applicateur (64) de tension entre en contact avec la trame (Y) entre le peigne modifié (16) et le composant (32) de mécanisme de maintien de trame dans un état où le composant (32) de mécanisme de maintien de trame maintient la partie d'extrémité de la trame (Y).
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201280007180.5A CN103348045B (zh) | 2011-02-01 | 2012-02-01 | 纬纱张力赋予装置 |
| EP12741917.4A EP2671987B1 (fr) | 2011-02-01 | 2012-02-01 | Machine à tisser avec dispositif d'application de tension pour trame |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011019763 | 2011-02-01 | ||
| JP2011-019763 | 2011-02-01 | ||
| JP2012015959A JP5689827B2 (ja) | 2011-02-01 | 2012-01-27 | 緯糸張力付与装置 |
| JP2012-015959 | 2012-07-05 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012105603A1 true WO2012105603A1 (fr) | 2012-08-09 |
Family
ID=46602810
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/052254 Ceased WO2012105603A1 (fr) | 2011-02-01 | 2012-02-01 | Dispositif d'application de tension pour trame |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP2671987B1 (fr) |
| JP (1) | JP5689827B2 (fr) |
| CN (1) | CN103348045B (fr) |
| WO (1) | WO2012105603A1 (fr) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110735217B (zh) * | 2019-11-21 | 2020-12-22 | 福建宇邦纺织科技有限公司 | 一种喷气织机织造化纤长丝织物捕纬装置 |
| JP7776255B2 (ja) * | 2020-07-07 | 2025-11-26 | 株式会社豊田自動織機 | 緯糸張力付与装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0214046A (ja) * | 1988-06-27 | 1990-01-18 | Tagawa Kikai Kk | 無杼織機の緯糸端処理装置 |
| JPH07166448A (ja) * | 1993-12-16 | 1995-06-27 | Toyota Autom Loom Works Ltd | 流体噴射式織機の緯糸張力付与装置 |
| JPH10204751A (ja) | 1997-01-14 | 1998-08-04 | Toyota Autom Loom Works Ltd | ジェットルームにおける緯糸張力付与装置 |
| JP2004218103A (ja) * | 2003-01-10 | 2004-08-05 | Tsudakoma Corp | 流体噴射式織機の緯糸張力付与装置 |
| JP2006510820A (ja) * | 2002-12-20 | 2006-03-30 | ピカノール エヌ. ヴィ. | 緯糸をストレッチする装置および方法 |
| JP2011019763A (ja) | 2009-07-16 | 2011-02-03 | Terumo Corp | 医療用デバイス |
| JP2012015959A (ja) | 2010-07-05 | 2012-01-19 | Sony Corp | 撮像装置、撮影方法、撮影プログラム、画像処理装置、画像処理方法及び画像処理プログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4976292A (en) * | 1988-06-27 | 1990-12-11 | Tagawa Kikai Co., Ltd. | Weft end tensioning and detecting devices for shuttleless loom |
| JPH0616948Y2 (ja) * | 1988-10-14 | 1994-05-02 | 日産自動車株式会社 | 水噴射式織機の緯糸端保持装置 |
| DE10256876A1 (de) * | 2002-12-04 | 2004-07-22 | Lindauer Dornier Gmbh | Verfahren zum Halten und Freigeben eines Schussfadens im Bereich der Hauptdüse einer Düsenwebmaschine, insbesondere Luftdüsenwebmaschine und Luftdüsenwebmaschine zur Durchführung des Verfahrens |
| CN2687148Y (zh) * | 2004-01-19 | 2005-03-23 | 任伟 | 织机的纬纱预加张力装置 |
| JP2007308825A (ja) * | 2006-05-17 | 2007-11-29 | Toyota Central Res & Dev Lab Inc | エアジェットルームにおける緯入れ装置 |
| US7748414B2 (en) * | 2006-12-12 | 2010-07-06 | Itema (Switzerland) Ltd | Method and apparatus for the insertion of weft threads |
-
2012
- 2012-01-27 JP JP2012015959A patent/JP5689827B2/ja not_active Expired - Fee Related
- 2012-02-01 CN CN201280007180.5A patent/CN103348045B/zh not_active Expired - Fee Related
- 2012-02-01 EP EP12741917.4A patent/EP2671987B1/fr not_active Not-in-force
- 2012-02-01 WO PCT/JP2012/052254 patent/WO2012105603A1/fr not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0214046A (ja) * | 1988-06-27 | 1990-01-18 | Tagawa Kikai Kk | 無杼織機の緯糸端処理装置 |
| JPH07166448A (ja) * | 1993-12-16 | 1995-06-27 | Toyota Autom Loom Works Ltd | 流体噴射式織機の緯糸張力付与装置 |
| JPH10204751A (ja) | 1997-01-14 | 1998-08-04 | Toyota Autom Loom Works Ltd | ジェットルームにおける緯糸張力付与装置 |
| JP2006510820A (ja) * | 2002-12-20 | 2006-03-30 | ピカノール エヌ. ヴィ. | 緯糸をストレッチする装置および方法 |
| JP2004218103A (ja) * | 2003-01-10 | 2004-08-05 | Tsudakoma Corp | 流体噴射式織機の緯糸張力付与装置 |
| JP2011019763A (ja) | 2009-07-16 | 2011-02-03 | Terumo Corp | 医療用デバイス |
| JP2012015959A (ja) | 2010-07-05 | 2012-01-19 | Sony Corp | 撮像装置、撮影方法、撮影プログラム、画像処理装置、画像処理方法及び画像処理プログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2671987A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103348045A (zh) | 2013-10-09 |
| EP2671987B1 (fr) | 2015-07-29 |
| JP5689827B2 (ja) | 2015-03-25 |
| CN103348045B (zh) | 2015-02-11 |
| JP2012177216A (ja) | 2012-09-13 |
| EP2671987A4 (fr) | 2014-08-06 |
| EP2671987A1 (fr) | 2013-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH0333823B2 (fr) | ||
| TWI503460B (zh) | 橡膠加強用織物編織用織機中之織入邊形成裝置 | |
| EP2449158B1 (fr) | Dispositif et procédé de saisie et d étirage des fils de trame dans une machine à tisser | |
| JP5689827B2 (ja) | 緯糸張力付与装置 | |
| EP2476788A2 (fr) | Procédé de tissage pour métier à tisser à jet d'air | |
| JP3423331B2 (ja) | 織機の緯糸挿入装置とこのような装置を有する織機 | |
| CN104220659B (zh) | 捕捉和拉伸纬纱的装置、织机、捕捉和拉伸纬纱的方法 | |
| CN101994201B (zh) | 喷气投纬织机中的纬纱把持装置 | |
| JP4410048B2 (ja) | ジェットルームにおける緯糸張力付与装置 | |
| US6422270B2 (en) | Weft selvage tuck-in nozzle injection timing apparatus | |
| CN1729330B (zh) | 用于拉伸的装置和方法 | |
| JPS6327462B2 (fr) | ||
| EP1437431A2 (fr) | Dispositif de tension de la trame pour métiers à tisser à tuyères | |
| JP4234263B2 (ja) | 空気噴射織機の緯糸張力保持装置 | |
| JPH01174645A (ja) | 無杼織機のタックイン装置 | |
| JP2001164443A (ja) | 織機の補助開口装置 | |
| JP2004150001A (ja) | 織機の緯糸張力付与装置 | |
| CN1497085A (zh) | 流体喷射式织机中的纬纱把持装置 | |
| JP2004107819A (ja) | 空気噴射式織機の緯糸飛走制御装置 | |
| JP2958273B2 (ja) | 流体噴射式織機の緯糸張力付与方法および装置 | |
| CZ20013766A3 (cs) | Způsob brzdění útku při prohozu útku prošlupem na pneumatickém tkacím stroji a zařízení k provádění způsobu | |
| JP3635994B2 (ja) | ジェットルームにおける緯糸処理方法及び装置 | |
| JPH08260296A (ja) | 水噴射式織機 | |
| JP2002061051A (ja) | エアジェットルームの緯糸張力保持装置 | |
| JPH0243903Y2 (fr) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12741917 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012741917 Country of ref document: EP |