WO2024252612A1 - Unité de commande, corps mobile, dispositif de robot mobile, procédé de commande et support de stockage - Google Patents
Unité de commande, corps mobile, dispositif de robot mobile, procédé de commande et support de stockage Download PDFInfo
- Publication number
- WO2024252612A1 WO2024252612A1 PCT/JP2023/021333 JP2023021333W WO2024252612A1 WO 2024252612 A1 WO2024252612 A1 WO 2024252612A1 JP 2023021333 W JP2023021333 W JP 2023021333W WO 2024252612 A1 WO2024252612 A1 WO 2024252612A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- arm
- moving
- unit
- arm unit
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
Definitions
- the present invention relates to a control unit, a mobile body, a mobile robot device, a control method, and a storage medium.
- Patent Document 1 Technology relating to an automatic transport device equipped with a robot arm has been disclosed (see, for example, Patent Document 1).
- One embodiment of the present invention is a control unit that controls a mobile robot device that includes a mobile body and an arm unit attached to the mobile body, and controls the mobile body to move in response to a reaction force generated by a driving force of the arm unit.
- One embodiment of the present invention is a control unit that controls a mobile robot device that includes a mobile body and an arm unit attached to the mobile body, and controls the mobile body to move in a direction opposite to the movement direction of the arm unit so as to cancel out a reaction force generated by the driving force of the arm unit.
- One embodiment of the present invention is a control unit that controls a mobile robot device that includes a mobile body and an arm unit attached to the mobile body, and controls the mobile body to move freely in response to a reaction force generated by the driving force of the arm unit.
- One embodiment of the present invention is a moving object equipped with the above-mentioned control unit.
- One embodiment of the present invention is a mobile robot device that includes the above-mentioned control unit, mobile body, and arm unit.
- One embodiment of the present invention is a control method for controlling a mobile robot device that includes a mobile body and an arm unit attached to the mobile body, and controls the mobile body to move in response to a reaction force generated by a driving force of the arm unit.
- One embodiment of the present invention is a control method for controlling a mobile robot device that includes a mobile body and an arm unit attached to the mobile body, and the control method causes the mobile body to move freely in response to a reaction force generated by a driving force of the arm unit.
- One embodiment of the present invention is a control method for controlling a mobile robot device that includes a mobile body and an arm section attached to the mobile body, and the control method moves the mobile body in a direction opposite to the direction of movement of the arm section so as to cancel out a reaction force generated by the driving force of the arm section.
- One embodiment of the present invention is a control method for controlling a mobile robot device having a mobile body and an arm section attached to the mobile body, the control method being a computer-readable storage medium that stores a program for controlling the mobile body so that it moves in response to a reaction force generated by the driving force of the arm section.
- One embodiment of the present invention is a control method for controlling a mobile robot device having a mobile body and an arm section attached to the mobile body, and is a computer-readable storage medium that stores a program for causing the mobile body to move freely in response to a reaction force generated by the driving force of the arm section.
- One embodiment of the present invention is a control method for controlling a mobile robot device having a mobile body and an arm section attached to the mobile body, the control method being a computer-readable storage medium that stores a program for moving the mobile body in a direction opposite to the direction of movement of the arm section so as to counteract a reaction force generated by a driving force of the arm section.
- FIG. 2 is a diagram showing an example of a side view of the mobile robot device according to the embodiment.
- FIG. 2 is a diagram showing an example of a top view of the mobile robot device according to the embodiment.
- FIG. 2 is a diagram illustrating an example of a wheel portion of the embodiment.
- FIG. 2 is a diagram illustrating an example of a functional configuration of a control device according to an embodiment.
- FIG. 2 is a diagram illustrating an example of an outline of control by a moving object control unit according to an embodiment.
- FIG. 11 is a diagram illustrating an example of an operation of a moving object control unit according to the embodiment.
- FIG. 2 is a diagram illustrating an example of an outline of control by a moving object control unit according to an embodiment.
- the mobile robot device 30 is, for example, an AGV (Automatic Guided Vehicle), which is a device that transports objects under computer control.
- AGV Automatic Guided Vehicle
- FIG. 1 is a diagram showing an example of a side view of a mobile robot device 30 according to the present embodiment.
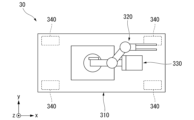
- FIG. 2 is a diagram showing an example of a top view of the mobile robot device 30 according to the present embodiment.
- the mobile robot device 30 includes a moving body 310 , an arm unit 320 , a wheel unit 340 , and a position detection unit 350 .
- the mobile body 310 is a base portion on which each part of the mobile robot device 30 is placed, and is movable in a predetermined direction or any direction by means of wheels 340 .
- the wheel unit 340 is provided on the bottom surface of the moving body 310 and moves the moving body 310.
- the wheel unit 340 can be configured in various shapes.
- the wheel unit 340 is provided at each of the four corners of the bottom surface of the moving body 310, and each wheel is a drive wheel with a variable steering angle.
- the steering angle, rotational speed, rotational force, etc. of the wheel unit 340 are controlled by the control device 1 described later. It is sufficient that one of the multiple wheel units 340 is a driving wheel, and the others may be driven wheels without driving force.
- the mobile robot device 30 is a device that moves on a floor surface, the wheel unit 340 may be guided by rails laid on the floor surface. If the mobile robot device 30 is a device that moves while suspended from a ceiling surface, the wheel unit 340 may be guided by rails installed on the ceiling surface.
- the wheel unit 340 does not need to have a variable steering angle.
- An example of a wheel portion 340 is shown in FIG.
- the arm unit 320 grasps and moves (or processes) an object using an end effector attached to the hand.
- the arm unit 320 is composed of joints and links that connect the joints to each other.
- the arm unit 320 changes the position and posture of the hand by displacing the links due to rotation around the rotation axis of the joint.
- the arm unit 320 is a robot arm with multiple degrees of freedom that is equipped with multiple joints, and is mounted on the moving body 310.
- the arm unit 320 is equipped with a rotary encoder (not shown) for each joint that detects the rotation angle of the joint. Arm unit 320 is displaced relative to mobile body 310, which is the base.
- coordinates expressing the space in which mobile robot device 30 moves by wheel unit 340 are also referred to as global coordinates.
- Coordinates expressing the space in which arm unit 320 moves relative to mobile body 310, which is the base, are also referred to as local coordinates.
- the mobile robot device 30 may also include a counterweight 330.
- the counterweight 330 reduces changes in the center of gravity of the mobile robot device 30 caused by displacement of the arm unit 320 in the local coordinate system.
- the position and orientation of the counterweight 330 may be controlled by an actuator (not shown) in response to the displacement of the arm unit 320 in the local coordinate system.
- the position detection unit 350 detects the position of the moving body 310.
- the position detection unit 350 includes a rotary encoder (not shown) that detects the number of rotations of the wheel of the wheel unit 340, and a rotary encoder (not shown) that detects the steering angle of the wheel unit 340.
- the position detection unit 350 detects the position of the moving body 310 in the global coordinate system by calculating the direction and distance of movement of the moving body 310 based on the results detected by the rotary encoder.
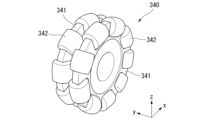
- FIG. 3 is a diagram showing an example of the wheel unit 340 of this embodiment.
- the wheel unit 340 may be configured such that multiple secondary wheels 342 are arranged on the circumference of the wheel 341.
- the secondary wheel 342 has a secondary rotation axis in a direction different from the rotation axis of the wheel 341, and rotates freely around the secondary rotation axis.
- the wheel unit 340 can move the moving body 310 in multiple directions (e.g., the x-axis direction and the y-axis direction) without changing the steering angle by the rotation of the wheel 341 around the rotation axis and the free rotation of the secondary wheel 342 around the secondary rotation axis.
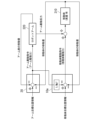
- FIG. 4 is a diagram illustrating an example of a functional configuration of the control device 1 according to the present embodiment.
- the control device 1 controls the behavior of the mobile robot device 30 and each of its components.
- the control device 1 is a device equipped with a calculation function using a microcomputer or the like, and includes a mobile body control unit 10 and an arm control unit 20 as its functional units.
- the mobile body control unit 10 and the arm control unit 20 may be realized as a single device, or may be realized as separate devices.
- the control device 1 may be a computer device mounted on the mobile robot device 30, or may be a computer device not mounted on the mobile robot device 30.
- the control device 1 may be capable of communicating with a device outside the mobile robot device 30 by wired communication or wireless communication.
- the wireless communication may be a method using radio waves such as a wireless LAN (Local Area Network), a public switched telephone network, or microwave communication, or may be a method using light such as laser communication or infrared communication.
- the moving body control unit 10 includes a target position acquisition unit 110 and a position control unit 120 as its functional units.
- Information indicating the target position of the moving body 310 is provided to the moving body control unit 10 from a higher-level device (not shown).
- the target position of the moving body 310 is a position where the moving body 310 should be located so as to be an optimal position when the arm unit 320 operates.
- the information indicating the target position of the moving body 310 is also referred to as moving body target position information.
- the target position acquisition unit 110 acquires moving object target position information from a higher-level device and outputs the acquired moving object target position information to the position control unit 120.
- the position control unit 120 performs feedback control (e.g., position servo control) so that the moving body 310 is positioned at the target position indicated by the moving body target position information.
- feedback control is a control that compares the position of the moving body 310 with the target position and performs a correction operation to match them, and is also called closed-loop control.
- the position control unit 120 feedback controls the position of the moving body 310 based on the moving body target position information acquired by the target position acquisition unit 110 and the position of the moving body 310 detected by the position detection unit 350.
- the position control of the moving body 310 performed by the position control unit 120 is also referred to as positioning control.
- the servo stiffness of the position control of the moving body 310 performed by the position control unit 120 is also referred to as positioning force.
- position control refers to control in which the target value of the servo mechanism is a position or an angle.
- the servo stiffness is the ratio between an external force and a position deviation when position control is performed by a servo mechanism.
- the arm control unit 20 includes an arm target position acquisition unit 210 and an arm drive control unit 220 as its functional units.
- Information indicating a position for the hand (e.g., an end effector) of the arm unit 320 to process an object (e.g., a pallet) is provided to the arm control unit 20 from a higher-level device (not shown).
- information indicating a position for the hand of the arm unit 320 to process an object is also referred to as arm target position information.
- the target position of the hand of the arm unit 320 indicated by the arm target position information is also referred to as arm target position.
- the arm target position acquisition unit 210 acquires arm target position information from a higher-level device and outputs the acquired arm target position information to the arm drive control unit 220.
- the arm drive control unit 220 performs feedback control (e.g., position servo control) to match the position of the hand of the arm unit 320 with the target position indicated by the arm target position information. More specifically, the arm drive control unit 220 feedback controls the position and attitude of the arm unit 320 based on the arm target position information acquired by the arm target position acquisition unit 210 and the rotation angle of each joint output from a rotary encoder of each joint of the arm unit 320. In the following description, controlling the position and controlling the attitude of the arm unit 320 will be collectively referred to as simply "controlling the position.”
- feedback control e.g., position servo control
- the positioning force reduction control of the moving body 310 by the moving body control unit 10 will be described.
- the driving reaction force is a reaction force to the driving force of the arm section 320.
- the moving body control section 10 positions the moving body 310 with a predetermined servo stiffness, if the moving body 310 is affected by the driving reaction force of the arm section 320, vibrations due to servo stiffness may occur in the moving body 310.
- the arm section 320 also vibrates, which may result in a decrease in the positioning accuracy of the end effector of the arm section 320.
- the magnitude of the vibration of the moving body 310 caused by the driving reaction force of the arm portion 320 depends on the magnitude of the servo stiffness (positioning force) of the moving body 310 .
- the moving body control unit 10 of this embodiment reduces the servo stiffness (positioning force) of the moving body 310 when the arm unit 320 is driven, thereby reducing the vibration of the moving body 310 caused by the driving reaction force of the arm unit 320.
- the control that reduces the servo stiffness (positioning force) of the moving body 310 is also referred to as positioning force reduction control.
- FIG. 5 is a diagram showing an example of an outline of control by the moving object control unit 10 of this embodiment.
- the moving object control unit 10 performs feedback control of the position of the moving object 310 based on moving object target position information provided from a higher-level device (not shown) and the amount of movement of the moving object 310.
- the amount of movement is the difference between the target position indicated by the moving object target position information and the position of the moving object 310.
- the moving object control unit 10 acquires the moving direction and moving distance of the moving object 310 detected by the position detection unit 350.
- the moving object control unit 10 calculates, as the amount of movement, the relative position of the moving object 310 when the target position indicated by the moving object target position information is set as the origin.
- the arm control unit 20 feedback controls the position of the arm unit 320 based on arm target position information provided by a higher-level device (not shown) and the amount of movement of the arm unit 320 .
- the mobile body control unit 10 performs feedback control of the position of the mobile body 310.
- the mobile body control unit 10 outputs the magnitude of the positioning force in the feedback control to the mobile body 310 as a mobile body drive command.
- the mobile body drive command includes a "normal mobile body drive command” that commands a positioning force of normal magnitude, and a “mobile body drive command with reduced positioning force” that commands a positioning force of reduced magnitude than normal.
- the normal magnitude of positioning force is, for example, a positioning force that does not cause the mobile body 310 to move in the global coordinate system due to the drive reaction force of the arm unit 320 when the arm unit 320 is displaced in the local coordinate system.
- the moving body control unit 10 outputs a moving body drive command with a reduced positioning force to the moving body 310.
- the moving body 310 operates the wheel unit 340 based on the moving body drive command output by the moving body control unit 10.
- the moving body 310 that receives the moving body drive command with the reduced positioning force has a weak positioning force against the driving reaction force of the arm unit 320. Therefore, when the arm unit 320 is displaced in the local coordinate system, the moving body 310 receives the driving reaction force of the arm unit 320 and moves from the target position in the global coordinate system.
- the amount of movement of the moving body 310 in the global coordinate system corresponds to the mass M of the moving body 310.
- the arm control unit 20 of this embodiment obtains the amount of movement of the moving body 310 from the position detection unit 350 of the moving body 310, and controls the position of the arm unit 320 by moving the arm unit 320 in the local coordinates by the amount of movement of the moving body 310.
- the control device 1 of this embodiment is capable of switching between normal positioning control in which the positioning force is not reduced and positioning force reduced control in which the positioning force is reduced to perform positioning control of the moving body 310.
- the control mode in which normal positioning control in which the positioning force is not reduced is also referred to as a first control state
- the control mode in which positioning force reduced control is also referred to as a second control state.
- the operation of the moving object control unit 10 capable of switching between the first control state and the second control state will be described with reference to FIG.
- FIG. 6 is a diagram showing an example of the operation of the moving object control unit 10 of this embodiment.
- Step S10 The moving object control unit 10 acquires moving object target position information from a higher-level device.
- Step S20 The moving object control unit 10 determines the control mode.
- the control mode is given to the moving body control unit 10 by, for example, a higher-level device (not shown).
- the higher-level device sets the first control state (i.e., a positioning control mode with a normal positioning force) when not driving the arm unit 320.
- the higher-level device sets the second control state (i.e., a positioning control mode with a reduced positioning force) when driving the arm unit 320. If the moving object control unit 10 determines that the control mode is the first control state, the process proceeds to step S30. If the moving object control unit 10 determines that the control mode is the second control state, the process proceeds to step S40.
- Step S30 First control state
- the moving body control unit 10 performs positioning control of the moving body 310 using a normal positioning force, and proceeds to step S50.
- Step S40 Second control state
- the moving body control unit 10 performs positioning control of the moving body 310 using the reduced positioning force, and proceeds to step S50.
- Step S50 The mobile body control unit 10 determines whether to end the positioning control. If the mobile body control unit 10 determines not to end the positioning control (Step S50; NO), the process returns to Step S10 and the positioning control is repeated. If the mobile body control unit 10 determines to end the positioning control (Step S50; YES), the process ends.
- the control device 1 controls a mobile robot device 30.
- the mobile robot device 30 includes a mobile body 310 and an arm unit 320 that is attached to the mobile body 310 and whose position relative to the mobile body 310 changes.
- the control device 1 controls the moving body 310 in a first control state in which a target position of the moving body 310 is controlled using a predetermined first positioning force, and a second control state in which the positioning force is reduced below the first positioning force.
- control device 1 is a control unit that controls a mobile robot device 30 that has a moving body 310 and an arm unit 320 provided on the moving body 310, and controls the moving body 310 to move in response to a reaction force generated by the driving force of the arm unit 320.
- the control device 1 configured in this manner performs positioning force reduction control of the moving body 310, thereby making it possible to reduce vibration of the moving body 310 caused by the movement of the arm unit 320 and the position servo stiffness of the moving body 310. Therefore, the control device 1 configured in this manner can reduce vibration of the hand of the arm unit 320 caused by vibration of the moving body 310.
- control device 1 may be a control unit that controls a mobile robot device 30 that has a moving body 310 and an arm unit 320 provided on the moving body 310, and may control the moving body 310 to move freely in response to a reaction force generated by the driving force of the arm unit 320.
- control device 1 may be a control unit that controls a mobile robot device 30 that has a moving body 310 and an arm unit 320 provided on the moving body 310, and controls the moving body 310 to move in a direction opposite to the movement direction of the arm unit 320 so as to cancel out the reaction force generated by the driving force of the arm unit 320.
- the control device 1 controls the position of the hand of the arm section 320 by moving the arm section 320 in the local coordinates by an amount corresponding to the movement of the movable body 310 in the global coordinates due to the arm drive reaction force. That is, when the control device 1 moves the movable body 310 in the direction opposite to the movement direction of the arm section 320, the control device 1 changes the relative position of the hand of the arm section 320 with respect to the movable body 310 based on the amount of movement of the movable body 310 in the global coordinates.
- the servo stiffness is reduced by the positioning force reduction control of the moving body 310, and the position of the hand of the arm unit 320 is corrected by the amount of the change in the position of the moving body 310, so that the position of the hand of the arm unit 320 can be brought closer to the target position.
- the control device 1 configured in this manner it is possible to reduce vibration of the hand of the arm unit 320 caused by the driving reaction force of the arm unit 320 and the position servo stiffness of the moving body 310 without reducing the accuracy of the position control of the arm unit 320.
- the control device 1 may control the target position of the mobile body 310 using a second positioning force obtained by reducing the positioning force in accordance with the drive state of the arm unit 320.
- the drive state of the arm unit 320 includes the presence or absence of movement of the arm unit 320, the movement speed, the movement amount, the movement direction, the state of change in posture, the change in the center of gravity of the arm unit 320, the change in the center of gravity of the mobile robot device 30 due to the movement of the arm unit 320, and the like.
- the force that moves the movable body 310 in the direction opposite to the movement direction of the arm unit 320 may be determined according to the degree of change in the relative position of the hand of the arm unit 320 with respect to the movable body 310 .
- the control device 1 configured in this manner, the amount of change in the position of the moving body 310 can be controlled with higher precision in accordance with the driving state of the arm portion 320 .
- reducing the positioning force of the movable body 310 also includes reducing the positioning force to zero.
- Reducing the positioning force to zero means bringing the movable body 310 into a state in which it can move freely against a force (i.e., an external force) applied to the movable body 310 from outside the movable body 310. That is, the control device 1 may reduce the positioning force of the movable body 310 to zero in the second control state.
- Reducing the positioning force to zero also includes stopping the target position control of the movable body 310. In this case, the control device 1 may reduce the positioning force by stopping the target position control of the movable body 310 in the second control state. According to the control device 1 configured in this manner, it is possible to reduce vibrations caused by the position servo stiffness of the moving body 310 through simpler control.
- the control device 1a of this embodiment includes a mobile object control unit 10a instead of the mobile object control unit 10 described above.
- This embodiment differs from the above-described first embodiment in that the second positioning force, which is a reduced positioning force, is determined based on the driving force of the arm unit 320 and the mass of the moving body 310.
- the force that moves the moving body 310 in the direction opposite to the moving direction of the arm unit 320 is determined based on the driving force of the arm unit 320 and the mass of the moving body 310.
- the same components as those in the first embodiment described above are denoted by the same reference numerals and the description thereof will be omitted.
- the moving body control unit 10a refers to the driving force of the arm unit 320 output by the arm control unit 20.
- the moving body control unit 10a calculates the second positioning force based on the acceleration of the moving body 310, which is obtained by dividing the driving force of the arm unit 320 by the mass M of the moving body 310.
- the control device 1a configured in this manner, the driving reaction force of the arm unit 320 can be cancelled out by the movement of the moving body 310. Therefore, according to the control device 1a, it is possible to reduce vibrations of the hand of the arm unit 320 caused by the position servo stiffness of the moving body 310 with high precision.
- the position detector 350 detects the amount of movement of the moving body 310, but this is not limiting.
- the control device 1 (or the control device 1a; in the following description, these are also collectively referred to as the control device 1) may control the position of the moving body 310 by so-called visual servoing.
- the control device 1 may change the position of the arm section 320 in the local coordinates by calculating the amount of movement of the moving body 310 based on the results of imaging the moving body 310.
- control device 1 may change the position of the arm unit 320 in the local coordinate system by calculating the amount of movement of the moving body 310 based on an image captured by an imaging unit mounted on the mobile robot device 30.
- the control device 1 may calculate the amount of movement of the moving body 310 based on an image of a position detection mark attached to an object to be grasped by the arm unit 320 or an image of a characteristic part of the object. According to the control device 1 configured in this manner, the amount of movement of the moving body 310 due to the displacement of the arm portion 320 can be grasped more precisely, and the accuracy of the position control of the arm portion 320 can be further improved.
- the wheel unit 340 of the moving body 310 may be equipped with a suspension that absorbs displacement in the direction of gravity (for example, in the direction of the z-axis).
- This suspension includes a suspension that can change the rigidity of the displacement in the direction of gravity by an actuator (so-called variable damping force suspension) and a suspension that actively absorbs the displacement in the direction of gravity by an actuator (so-called active suspension).
- the control device 1 may reduce the positioning force of the moving body 310 in the direction of gravity by the actuator when moving the moving body 310 in the direction opposite to the moving direction of the arm unit 320.
- the mobile robot device 30 is equipped with an acceleration sensor (not shown), and the control device 1 may reduce the positioning force of the mobile body 310 in the direction of gravity by calculating the displacement of the mobile body 310 in the direction of gravity due to the driving reaction force of the arm section 320 based on the acceleration in the direction of gravity detected by the acceleration sensor.
- the moving body 310 may also be equipped with wheel units 340 with variable steering angles, or wheel units 340 that can move in multiple directions as shown in FIG. 3.
- the control device 1 may reduce the positioning force in at least two of the movement directions of the wheel units 340.
- the moving body 310 may be configured to be able to rotate around at least an axis in the direction of gravity (e.g., the z-axis) by being driven by the wheel unit 340.
- the control device 1 may reduce the positioning force around the axis in the direction of gravity, which is one of the movement directions of the wheel unit 340.
- the movement direction of the moving body 310 may be limited to one direction along the rails.
- the control device 1 may be configured to reduce the positioning force in one direction determined as the movement direction of the moving body 310 when moving the moving body 310 in the direction opposite to the movement direction of the arm unit 320.
- the mobile robot device 30 has been described as a single-arm robot, but this is not limited to the above.
- the mobile robot device 30 may have multiple arm units 320.
- the mobile robot device 30 may be a dual-arm robot having two arm units 320.
- the mobile body 310 has multiple arm units 320.
- the control device 1 may be configured to reduce the change in the center of gravity caused by the displacement of some of the multiple arm units 320 by the displacement of the other arm units 320 when moving the mobile body 310 in the direction opposite to the movement direction of the arm units 320.
- Mobile robot device 30 may also be provided with a counterweight (not shown) that reduces the rotational moment around the rotation axis of arm unit 320 (e.g., around the z-axis).
- the moving body 310 includes a movable part (counterweight) whose relative position with respect to the moving body 310 changes at least around the gravity direction axis.
- the control device 1 may be configured to reduce the moment around the gravity direction axis caused by the displacement of the arm unit 320 by the displacement of the movable part in the second control state.
- This counterweight moves following the change in the position of the center of gravity of the arm unit 320 caused by the displacement of the arm unit 320 based on the control of the control device 1, thereby reducing the moment around the gravity direction axis caused by the displacement of the arm unit 320.
- the counterweight functions as a counterweight for the displacement of the arm unit 320.
- the position of the arm unit 320 can be controlled with higher accuracy. That is, the moving body 310 is provided with a counterweight that reduces the change in the center of gravity caused by the displacement of the arm portion 320 .
- each unit of each device in the above embodiments may be realized by dedicated hardware, or may be realized by a memory and a microprocessor.
- each unit of each device may be configured with a memory and a CPU (Central Processing Unit), and the functions of each unit of each device may be realized by loading a program (instructions) for realizing the function of the unit into the memory and executing the program.
- a program instructions
- a program for implementing the functions of each unit of each device may be recorded on a computer-readable recording medium, and the program recorded on the recording medium may be read into a computer system and executed to perform processing by each unit of the control unit.
- computer system here includes hardware such as the OS and peripheral devices.
- “computer system” utilizes a WWW system, it also includes the home page providing environment (or display environment).
- “computer-readable recording medium” refers to portable media such as flexible disks, optical magnetic disks, ROMs, and CD-ROMs, as well as storage devices such as hard disks built into computer systems.
- “computer-readable recording medium” also includes devices that dynamically store a program for a short period of time, such as communication lines when transmitting a program via a network such as the Internet or a communication line such as a telephone line, and devices that store a program for a certain period of time, such as volatile memory inside a computer system that serves as a server or client in such cases.
- the above-mentioned program may be one that realizes part of the above-mentioned functions, or may be one that can realize the above-mentioned functions in combination with a program already recorded in the computer system.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
L'invention concerne une unité de commande pour commander un dispositif de robot mobile comprenant un corps mobile et une unité de bras disposée sur le corps mobile. L'unité de commande effectue une commande de telle sorte que le corps mobile se déplace en fonction d'une force de réaction générée par une force d'entraînement de l'unité de bras.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/021333 WO2024252612A1 (fr) | 2023-06-08 | 2023-06-08 | Unité de commande, corps mobile, dispositif de robot mobile, procédé de commande et support de stockage |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/021333 WO2024252612A1 (fr) | 2023-06-08 | 2023-06-08 | Unité de commande, corps mobile, dispositif de robot mobile, procédé de commande et support de stockage |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024252612A1 true WO2024252612A1 (fr) | 2024-12-12 |
Family
ID=93795597
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/021333 Ceased WO2024252612A1 (fr) | 2023-06-08 | 2023-06-08 | Unité de commande, corps mobile, dispositif de robot mobile, procédé de commande et support de stockage |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024252612A1 (fr) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01289683A (ja) * | 1988-05-12 | 1989-11-21 | Mitsubishi Electric Corp | 人工衛星 |
| JPH02141398A (ja) * | 1988-11-24 | 1990-05-30 | Fujitsu Ltd | 宇宙装置の姿勢保持制御方式 |
| US5214749A (en) * | 1991-06-12 | 1993-05-25 | Massachusetts Institute Of Technology | Dynamic control of a robot with its center of mass decoupled from an end effector by a redundant linkage |
| JP2011173218A (ja) * | 2010-02-25 | 2011-09-08 | Toyota Motor Corp | 搬送装置及びその位置決め方法 |
| WO2013038998A1 (fr) * | 2011-09-13 | 2013-03-21 | 株式会社安川電機 | Robot automoteur et chariot automoteur |
| JP2013094947A (ja) * | 2011-11-04 | 2013-05-20 | Honda Motor Co Ltd | ロボットアーム |
| JP2013193198A (ja) * | 2012-03-23 | 2013-09-30 | National Institute Of Advanced Industrial Science & Technology | 壁面走行用ロボット |
| JP2018008320A (ja) * | 2016-07-11 | 2018-01-18 | 国立大学法人広島大学 | 多関節ロボットアーム及びuav |
| JP2020163482A (ja) * | 2019-03-28 | 2020-10-08 | セイコーエプソン株式会社 | ロボットの制御方法およびロボットシステム |
| JP2020192620A (ja) * | 2019-05-24 | 2020-12-03 | 株式会社デンソーウェーブ | ロボットシステム |
-
2023
- 2023-06-08 WO PCT/JP2023/021333 patent/WO2024252612A1/fr not_active Ceased
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01289683A (ja) * | 1988-05-12 | 1989-11-21 | Mitsubishi Electric Corp | 人工衛星 |
| JPH02141398A (ja) * | 1988-11-24 | 1990-05-30 | Fujitsu Ltd | 宇宙装置の姿勢保持制御方式 |
| US5214749A (en) * | 1991-06-12 | 1993-05-25 | Massachusetts Institute Of Technology | Dynamic control of a robot with its center of mass decoupled from an end effector by a redundant linkage |
| JP2011173218A (ja) * | 2010-02-25 | 2011-09-08 | Toyota Motor Corp | 搬送装置及びその位置決め方法 |
| WO2013038998A1 (fr) * | 2011-09-13 | 2013-03-21 | 株式会社安川電機 | Robot automoteur et chariot automoteur |
| JP2013094947A (ja) * | 2011-11-04 | 2013-05-20 | Honda Motor Co Ltd | ロボットアーム |
| JP2013193198A (ja) * | 2012-03-23 | 2013-09-30 | National Institute Of Advanced Industrial Science & Technology | 壁面走行用ロボット |
| JP2018008320A (ja) * | 2016-07-11 | 2018-01-18 | 国立大学法人広島大学 | 多関節ロボットアーム及びuav |
| JP2020163482A (ja) * | 2019-03-28 | 2020-10-08 | セイコーエプソン株式会社 | ロボットの制御方法およびロボットシステム |
| JP2020192620A (ja) * | 2019-05-24 | 2020-12-03 | 株式会社デンソーウェーブ | ロボットシステム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11738456B2 (en) | Palletizing boxes | |
| US9452532B2 (en) | Robot, device and method for controlling robot, and computer-readable non-transitory recording medium | |
| JP4716392B2 (ja) | ペイロードの被安定化プラットホーム装置 | |
| US9889562B1 (en) | Smart kickstand for balancing a mobile robotic arm | |
| JP4490997B2 (ja) | 移動ロボット | |
| JP7143633B2 (ja) | ロボットシステム、制御装置および制御方法 | |
| CN113631324A (zh) | 多主体控制器和机器人 | |
| JP7549340B2 (ja) | ロボット | |
| EP3839464B1 (fr) | Capteur de force à multiples degrés de liberté | |
| JP7091733B2 (ja) | 位置推定システム、位置検出方法、およびプログラム | |
| CN111278610A (zh) | 用于运行可移动机器人的方法和系统 | |
| KR102236139B1 (ko) | 이동 로봇의 보행 제어 시스템과 방법 및 이를 위한 컴퓨터 프로그램 | |
| WO2020012710A1 (fr) | Dispositif de commande de manipulateur, procédé de commande de manipulateur et programme de commande de manipulateur | |
| JP5454333B2 (ja) | 移動体装置及び移動制御プログラム | |
| CN117426872A (zh) | 包括支承结构和机器人定位器的系统 | |
| JP7537075B2 (ja) | 移動ロボット | |
| US11519550B2 (en) | Stabilization device and method for stabilizing an attachment component | |
| JP5758777B2 (ja) | ロボット | |
| JP2020146794A (ja) | ロボットシステム、制御装置、および制御方法 | |
| WO2024252612A1 (fr) | Unité de commande, corps mobile, dispositif de robot mobile, procédé de commande et support de stockage | |
| JP4613539B2 (ja) | ロボットの動作計画方法 | |
| US20210146542A1 (en) | Control method for robot system | |
| JP2020131388A (ja) | ロボットシステム、制御装置、および制御方法 | |
| JP7789148B1 (ja) | 作業ロボット、作業ロボットの制御方法 | |
| KR102863414B1 (ko) | 김블 컨트롤러의 동작 방법, 및 이를 이용하는 장치 및 프로그램 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23940711 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |