CN1053773C - 发电机的电力稳定装置 - Google Patents
发电机的电力稳定装置 Download PDFInfo
- Publication number
- CN1053773C CN1053773C CN95118862A CN95118862A CN1053773C CN 1053773 C CN1053773 C CN 1053773C CN 95118862 A CN95118862 A CN 95118862A CN 95118862 A CN95118862 A CN 95118862A CN 1053773 C CN1053773 C CN 1053773C
- Authority
- CN
- China
- Prior art keywords
- power
- difference
- differential
- generator
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/10—Control effected upon generator excitation circuit to reduce harmful effects of overloads or transients, e.g. sudden application of load, sudden removal of load, sudden change of load
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/10—Control effected upon generator excitation circuit to reduce harmful effects of overloads or transients, e.g. sudden application of load, sudden removal of load, sudden change of load
- H02P9/105—Control effected upon generator excitation circuit to reduce harmful effects of overloads or transients, e.g. sudden application of load, sudden removal of load, sudden change of load for increasing the stability
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Eletrric Generators (AREA)
Abstract
发电机的功率稳定装置向自动电压调节器(3)输入一个电压调节信号(e),作为辅助信号,以便控制发电机端电压为目标电压(Vo),其中包括:角加速观测器(1),用来根据发电机的至少一个稳定信号差分(ΔP和/或Δω)计算发电机的估算的角加速差分(Δas);以及功率稳定电路(2),用来根据由角加速度观测器(1)计算的估算角加速差分值(Δas),计算施加于自动电压调节器(3)的校正电压调节信号(e)。最好对各波动频率提供多个观测器和功率稳定器。
Description
本发明涉及一种电力发电机的功率稳定装置,更具体地说,涉及一种这样的功率稳定装置,它向自动电压调节输入电压调节信号(作为加于目标电压信号的辅助信号),用以调节发电机的激磁值,从而使发电机的端电压被控制在目标值上。
一般地说,用于发电机的激磁控制装置包括自动电压调节器(AVR),用于维持发电机端电压为恒值,以及功率稳定装置(PSS),用来通过把发电机电压调节到其目标值来稳定发电机的运行。具体地说,功率稳定功率用来增加制动力(阻尼力),以便反抗由施加于发电机的不可避免的扰动引起的相角波动。这就是说,功率稳定装置检测并计算有功功率的差分ΔP,发电机角速度的差分Δω或系统侧频频率的差分Δf等,并向自动电压调节器输入计算的结果作为加于目标电压信号的电压调节信号的辅助信号。
更详细地说,图14是表示先有技术中有功功率差分ΔP型(以后叫ΔP-PSS)的功率稳定装置的方块图。在这一功率稳定装置中,有功功率差分ΔP(作为稳定信号)通过信号重调函数部分7(由重调滤波器以及延迟电路或频带消除滤波器构成),以便消除噪声和目标值的稳态电压偏差,然后通过相位补偿函数部分8,进行相位校正,从而获得合适的电压调节信号。
上述ΔP-PSS型差分稳定装置被广泛采用,这是因为ΔP-PSS不受高频噪声的影响,并且不用进行相位补偿,因此,和其它类型(例如)角速度差分型(Δω-PSS)或频率差分型(Δf-PSS))相比,函数的设定相对容易。
这里,在差分稳定装置中,当发电机磁场按照角速度差分Δω被控制时,可以最有效地抑制功率波动。然而,在另一方面,在功率稳定装置的输出和发电机磁场的改变之间,由于磁场电路的滞后,存在着滞后作用。例如,当波动频率为1Hz时,装置的频率响应中存在大约90度的相位滞后。因而,在这种功率稳定装置中,为了寂偿磁场电路的滞后,最好能反馈角加速度差分Δa,因为角加速度差分Δa在相位上超前角速度差分Δω90度。然而,检测角加速度差分Δa并不容易。
因此,在ΔP-PSS中,有功功率差分ΔP被用作反馈信号,它大致和角加速度差分Δa成正比,用它代替角加速度差分Δa。
虽然使用有功功率差分ΔP的功率稳定装置是实用的,但是存在一个问题,这就是这种功率稳定装置不能对低频干扰(由发电机输出的变化表示)进行有效的稳定。此外,当发电机的输出以恒速改变时,因为有有功功率差分ΔP保持常数,而使功率稳定装置保持输出恒定的目标电压校正值。因为自动电压调节器控制发电机端电压,使其跟随这一目标电压校正值,只要发电机的输出在变化,发电机电压就偏离预定的目标值。这就是说,这种功率稳定装置执行一种不必要的电压控制操作。
此外,在常规的功率稳定装置中,为了减少上述的自动电压调节器的不需要的电压控制操作,附带地提供了一个重调时间为5秒的重调滤波器。然而,因为这一重调滤波器当功率波动频率为0.3Hz或更低时(长周期的波动)重调这一信号,所以该滤波器进一步减弱了ΔP-PSS对于低频干扰的稳定能力。
在另一方面,在常规的ΔP-PSS中,相位是被这样调节的,使得可以有效地阻尼大约为1Hz的功率波动,所以有效地抑制低于0.3Hz的功率波动是困难的,这是因为合适的相位补偿根据所述频率而变化。当相位被这样调节时,即使得低于0.3Hz的功率波动可被有效地阻尼,但难于阻尼大约1Hz的功率波动(经常发生)。
如上所述,当功率波动频率为0.3Hz那样低时,从相位滞后的观点看来,磁场的滞后是小的,并因而在ΔP-PSS的情况下相位过份超前。因此,当波动频率为0.3Hz或更低时,使用角速度差分Δω(以后称为Δω-PSS)的功率稳定装置和ΔP-PSS相比对于稳定信号是合适的。这是因为在Δω-PSS的情况下,可以通过相位补偿有效地阻尼从0.3到1Hz的功率波动。然而,在Δω-PSS情况下,所需的相位补偿是超前相位补偿型,因而当功率波动频率大于1Hz时,瞬变增益增加,结果使Δω-PSS遭受噪声影响。因此,存在这样的问题,即Δω-PSS不能有效地抑制大约2或3Hz的相对高的频率的功率波动。此外,在频率差分型的功率稳定装置(Δf-PSS)中,也存在Δω-PSS的问题。
因而,本发明的目的在于,提供一种发电机的稳定装置,它能有效地稳定发电机的低频干扰,并且不受发电机输出的影响。
此外,本发明的另一个目的在于,提供一种功率稳定装置,它可以在最佳条件下,在从大约0.2Hz的低频到大约3Hz的高频的相当宽的范围内(这发生在一般的电力发电机系统中),适当地阻尼功率波动,并且它不受通常具有相当高的波动频率的噪声的影响。
为实现上述目的,本发明的第一个方面提供一种用于发电机的功率稳定装置,用来向自动电压调节器(3)输入电压调节信号(e),作为辅助信号用来把发电机的端电压控制在目标电压(Vo),该装置包括:
功率稳定器电路,用以计算加到该自动电压调节器(3)的校正电压调节信号(e);
其特征在于还包括:
角加速度观测器(1),用来根据发电机的至少一种稳定信号差分计算发电机估算的角加速度差分(Δas);以及
该功率稳定器电路(2)根据由所述角加速度观测器(1)计算的估算的角加速度的差分值(Δas)计算所述校正电压调节信号(e)。
这里,发电机的稳定信号差分是有功功率差分和角速度差分。
此外,角加速度观测包括:估算的角加速度差分计算装置,用来根据有功功率差分计算估算的角速度差分,估算的相位差角差分,估算的阻尼系数以及估算的有功功率差分,从而获得估算的角加速度差分,用来再现功率波动;以及有功功率差分反馈装置,用来计算有功功率差分和估算的有功功率差分之间的偏差信号,并把计算的偏差信号反馈给所述角加速度差分估算装置。
这里的估算的角加速度差分计算装置里可以包括:响应有功功率差分和反馈信号的第一加法器,用来计算估算的角加速度差分;第一积分器,用来积分估算的角加速度差分,从而获得角速度变化率;第二积分器,用来积分估算的角速度差分,从而获得估算的相位差角差分;第一乘法器,用来用一常数乘角速度差分,从而获得估算的阻尼系数;以及第二乘法器,用来用一常数乘估算的相位差角差分,从而获得估算的有功功率差分。
此外,有功功率差分反馈装置可以包括:第二加法器,用来计算有功功率差分和估算的有功功率差分之间的偏差;以及第三乘法器,用来用一常数乘计算的偏差,并把被乘的偏差信号反馈到所述估算角加速度差分计算装置(11)的所述第一加法器。
另外,最好功率稳定装置还包括角速度差分反馈装置,它包括:第三加法器,用来计算实际的角速度差分和估算的角速度差分之间的偏差;以及第四乘法器,用来用一常数乘计算的偏差,并把所乘的偏差反馈到所述估算角加速度差分计算装置的所述第一加法器。此外,最好还包括角速度差分反馈装置,它包括:第三加法器,用来计算实际的角速度差分和估算的角速度差分之间的偏差,以及连接在所述第一乘法器和所述第二乘法器之间的第四加法器;以及第五乘法器,用来用一常数乘计算的偏差,并把所乘的偏差反馈给所述估算的角加速度差分计算装置的所述第四加法器。
此外,最好所述功率稳定装置还包括角速度差分反馈装置,它包括:连接在所述第一乘法器和所述第二乘法器之间的第四加法器;第八加法器,用来计算实际的角速度差分和估算速度的角速度差分之间的偏差;第十乘法器,用来用一常数计算的偏差,从而把乘得的偏差反馈给所述估算的角加速度差分计算装置的所述第一加法器;以及第十一乘法器,用来用一常数乘计算的偏差,从而把被乘的偏差反馈给所述估算角加速度差分计算装置的所述第四加法器。此外,最好提供计算在有功功率差分和估算的有功功率差分之间的偏差的第五加法器,第八乘法器,用来用一常数乘计算的偏差,从而把乘得的结果施加给所述第一加法器;以及第九乘法器,用来有用一常数乘计算的偏差,从而把乘得的结果施加给所述第四加法器。最好还提供:第七乘法器,用来用一常数乘估算的相位差角差分;第七加法器,用来计算发电机电压差分和所乘的相位差角之间的差值;一次滞后滤波器,用来滞后计算的差值;第六乘法器,用来用一常数乘以被滞后的结果,以及第六加法器,用来加所乘的滞后的结果和估算的有功功率差分并把相加的结果供给所述第一加法器。
此外,按照本发明的第二方面,提供一种用于发电机的功率稳定装置,用来向自动电压调节器输入电压调节信号作为辅助信号,从而控制发电机端电压为目标电压,该装置包括:一组观测器,每个被分配给每一发电机输出波动频率,用来根据发电机的稳定信号差分中的至少一个计算下列量中的至少一个:估计的角加速度差分,估算的角速度差分;估算的有功功率差分和估算的对于每一波动频率的频率差分,一组功率稳定器电路,其中每个被分配给所述一组观测的一个,用来计算每个电压调节信号,根据下述量中至少一个进行所述计算:估算的角加速度差分,估算的角速度差分,估算的有功率差分和估算的对于每一波动频率的频率差分,以及加法器,用来加计算的电压调节信号,所加的电压调节信号被送给自动电压调节器。
这里的发电机的稳定信号差分是:有功功率差分,角速度差分,以及发电机的频率差分。
这里的所述一组观测器最好是:第一观测器,用来再现低频波动频率方式(0.5Hz或更低),第二观测器,用来再现中频波动频率方式(大约1Hz),以及第三观测器,用来再现高频波动频率方式(2Hz或更高)。
此外,最好所述一组观测器是:第一观测器,用来再现第一频率电波动频率方式(例如3Hz),以及第二观测器,用来再现第二频率机械振动频率方式(例如5Hz)。
此外,最好所述用来估算角速度差分的观测器分配给较低频的波动方式,并与角速度差分型的所述功率稳定电路相关;并且所述用来计算角加速度差分的所述观测器被分配给较高频率的波动方式,并和有效功率差分型的所述功率稳定电路相关。
此外,最好所述功率稳定装置还包括多个开关装置,每个被分别分配给所述观测器和所述功率稳定电路的每一个,用来选择至少一个所述的观测器和至少一个相应的所述功率稳定电路。
在本发明的第一方面中,当检测到由功率波动引起的有功功率差分时,由估算角加速度差分计算装置模拟预测的功率波动。估算的角加速度差分被送至功率稳定电路。根据估算的角加速度差分,功率稳定电路输出电压调节信号给自动电路调节器。
此外,有功功率差分反馈装置获得估算的有功功率差分和实际的有功功率差分之间的偏差,并用一合适的增益去乘所得偏差,从而把被乘的偏差反馈到估算角加速度差分计算装置。以同样方式,角速度差分反馈装置获得估算的角速度差分和实际的角速度差分之间的偏差,并用一合适的增益去乘该偏差,从而反馈所乘的偏差到估算角加速度差分计算装置。利用这些处理,就可以校正由模拟获得的估算值和实际值之间随着时间的推移而增加的偏差。
因而,因为以高精度估算的角加速度可以加于功率稳定电路,就可以消除低频噪声,否则当有效功率差分被直接加到功率稳定电路时,这噪声会引起问题。
按照本发明的第二个方面,一组观测器分别被分配给一组波动频率方式,并计算下列量中的至少一个:估算的角加速度变化率,估算的角速度差分,估算的有功功率差分和估算的频率差分。这些估算值的每一个被供到被分配给每个观测器的功率稳定电路,从而计算相应于每一波动方式的电压调节信号。这些电压调节信号由加法器相加,然后送给自动电压调节器作为电压调节信号。
因而,对于每一波动频率(例如0.5Hz或更低,大约1Hz和2Hz更高)都可以分别获得电压调节信号。
此外,当一组观测器是用于再现第一频率的电波动频率方式(例如3Hz)的第一观测器和用于再现第二频率的机械振动频率方式(例如5Hz)的第二观测器时,可以有效地从电波动频率分量中分离出机械振动频率成份。
在这种情况下,当用于估算角速度差分的观测器被分配给较低频率波动方式并和角速度差分型的功率稳定电路相关时,以及当用于估算角加速差分的观测器被分配给较高的频率波动方式并和有功功率差分型的功率稳定电路相关时,按照波德图可以实现最佳相位补偿。
此外,当多个开关装置每个被分别分配给每个观测器和每个功率稳定电路,以便选择至少一个观测器和至少一个相应的功率稳定电路时,就可以按照情况选择至少一所需的观测器和至少一相相应的功率稳定电路。
图1是本发明的功率稳定装置的基本实施例的方块图;
图2是按照本发明的功率稳定装置的角加速度吸收器的第一方面的第一实施例的方块图;
图3是按照本发明的功率稳定装置的角加速度吸收器的第一方面的第二实施例的方块图;
图4是按照本发明的功率稳定装置的角加速度吸收器的第一方面的第三实施例的方块图;
图5是按照本发明的功率稳定装置的角加速度吸收器的第一方面的第四实施例的方块图;
图6表示在短周期情况下按照本发明的第一方面的四实施例中获得的功率波动估算特性;
图7表示在短周期情况下按照本发明的第一方面的四实施例中获得的功率波动估算特性;
图8表示在短周期情况下按照本发明的第一方面的四实施例中获得的功率波动估算特性;
图9是按照本发明的稳定装置的第二方面的一实施例的方块图;
图10(a)和10(b)是表示磁场电路的传递特性的波德图,其中图10(a)表示增益-频率特性,图10(b)表示相位频率特性;
图11是按照本发明的稳定装置的第二方面的二实施例的方块图;
图12是按照本发明的稳定装置的第二方面的三实施例的方块图;
图13是按照本发明的稳定装置的第二方面的四实施例的方块图;
图14是说明现有技术中ΔP-PSS的功能的方块图。
下面参照附图说明本发明的发电机功率稳定装置(PSS)的实施例。
图1表示本发明的功率稳定装置的基本实施例,它包括角加速度观测器1和功率稳定电路2。角加速度观测器1响应发电机的有功功率差分ΔP或发电机的角速度差分Δω,计算估算的角加速度差分Δas(s代表估计值)。此外,根据计算的估算角加速度差分Δas,功率稳定电路2计算电压调节信号e。这计算的电压调节信号e被供给加法器4。加法器4加电压调节信号e和目标电压Vo。这被信号施加于自动电压调节器3。根据电压调节信号e和目标电压Vo,自动电压调节器3控制发电机的激磁值,使得在相位补偿下发电机的端电压可被控制在目标电压Vo上。
如上所述,按照本发明的功率稳定装置,提供角加速度观测器1用来根据发电机的有功功率差分ΔP或角速度差分Δω估算发电机的角加速度差分Δas。这一估算的角加速度差分Δas作为稳定信号被送到功率稳定电路2。此外,角加速度观测器1具有至少一个电路用来再现功率波动,以便估算有功功率差分ΔPs与/或角速度差分Δωs。此外,角加速度观测器1计算估算的有功功率差分ΔPs和实际测量的功率差分ΔP之间的偏差与/或估算的发电机角速度差分Δωs和实际测量的角速度差分Δω之间的偏差。计算的偏差被分别乘以一个增益,然后被反馈回角速度观测器1的输入侧用于功率波动的再现。
下面说明角加速度观测器1可以精确地估算加速度差分Δa的原理。按照本发明的角加速度观测器1具有上述的用于再现功率波动的电路。因此,当功率波动再现电路检测由实际的功率波动引起的有功功率差分ΔP时,它可以根据检测的有功功率差分ΔP去模拟功率波动ΔPs。
这里,如果功率波动被简单地模拟,实际功率波动的振动频率和阻尼比将略微偏离随着时间的推移由功率波动再现电路模拟的值,这样,预测值(模拟所得)和实际值(观测所得)之间的偏差随时间的推移而增加。因此,在这一实施例中,在估算值和实际值之间的发电机的有功功率差分ΔP与/或角速度差分Δω中的偏差被分别乘以一个合适的增益,然后才反馈回功率波动再现电路(模拟器电路),从而便可以校正再现电路的估算值的相位和幅值,使其接近实际值。这一理论在控制理论中已作为观测器理论或卡耳曼滤波器理论被确立了。
在上述的功率波动再现电路中,除去电路的主要的振动方式之外,电路几乎不以其它方式工作,因而可以有效地且精确地消除低频噪声。此外,和带通滤波器不同,相位几乎不被滞后。
因此,当根据上述原理精确估算的角加速度差分被功率稳定电路2使用时,就可以消除低频噪声,否则当有功功率差分被直接使用时这噪声便会引起问题。
[第一方面]
(第一实施)
图2是按照本发明的角加速度观测器的第一方面的第一实施例的电路图。
在图2中,角加速度观测器1包括估算角加速度差分计算装置11,以及有功功率差分反馈装置12。
估算角加速度差分计算装置11包括第一加法器4a,第一积分器5a,第二积分器5b,第一(比例)乘法器6a,以及第二(比例)乘法器6b。此外,角加速度差分反馈装置12包括第二加法器4b和第三(反馈增益)乘法器7。
角加速度差分估算计算装置11根据发电机的有功功率差分ΔP再现(即表示)功率波动(即振动方式)。这就是说,估算计算装置11由第一积分器5a通过通分估算的角加速度差分Δas计算估算的角速度差分Δωs,通过由第二积分器5b积分计算的角速度差分Δωs计算估算的相位差角差分Δδs,通过用第二乘法器6b用K1(常数)乘以估算的相位差角差分Δδs,计算估算的有功功率差分ΔPs。此外,角加速度差分估算计算装置11通过第一乘法器6a用D(常数)乘以估算的角速度差分Δωs,获得估算的阻尼力(系数)值DΔωs。
有功功率差分反馈装置12由第二加法器计算有功功率差分ΔP和估计的有功功率差分ΔPs之间的偏差,并由第三乘法器7a把计算的偏差乘以L1(反馈增益),并把获得的偏差反馈回角加速度差分估算计算装置11的第一加法器4a。
在图2的第一实施例中,功率波动的再现电路包括第一积分器5a,第二积分器5b以及第一乘法器6a,使得可以用功率波动方式表示振荡。
因而,在第一实施例中,可以实现简单的角加速度观测,而不需任何角加速度检测器。
(第二实施例)
图3表示按照本发明的角加速度观测器的第一方面的第二实施例。它和图2的第一实施例的区别在于,除有功功率变化率ΔP之外角速度差分Δω被用作测量信号。这就是说,角加速度观测器1还包括由第三加法器4c和第四乘法器7b构成的角速度差分反馈装置13。第三加法器4c计算测量的角速度变化率Δω和估算的角速度差分Δωs(第一积分器5a的输出)之间的偏差。所加得的结果由第四乘法器7b乘以L2(反馈增益),然后反馈回第一加法器4a。
(第三实施例)
图4表示本发明的角加速度观测器的第一方面的第三实施例。它与图3所示的第二实施例的区别在于,测量的角速度差分Δω(第一积分器5a的输出)和估算的角速度差分Δωs之间的偏差被反馈到第一积分器5a的输出(不反馈到第一加法器4a)。
这就是说,角加速度观测器1还包括由第三加法器4c、第5乘法器7c和第四加法器4d构成的角速度差分反馈装置13。第三加法器4c计算测量的角速度差分Δω和估算的角速度差分Δωs(第一积分器5a的输出)之间的偏差。所加得的结果由第五乘法器7c乘以L3(反馈增益),然后反馈回连接在第一和第二积分器5a和5b之间的第四加法器4a。
在上述的第二和第三实施例中,虽然具有用于检测角速度差分Δω的角速度检测器,但增益的调整是相当容易的,这是因为反馈增益(需要被调节的)相当小。
(第四实施例)
图5表示按照本发明的角加速度观测器的第一方面的第四实施例。它和图2所示的第一实施例的区别在于,除有功功率差分ΔP之外,角速度差分Δω被用作测量信号;测量和角速度差分Δω被反馈回第一加法器4a(象第二实施例中一样)和第四加法器4d(如第三实施例);并且还附加有一次滞后滤波器8,除简单的二次振荡方式(如第一到第三实施例)之外,用来表示激磁滞后。
总之,在这一实施例中,估算的角速度差分Δω和估算的有功功率差分ΔPs两者都分别根据测量值(Δω或ΔP)和估算值(Δω或ΔPs)之间的偏差进行校正。
更详细地说,角加速度观测器1还包括第5至第7加法器4e到4g,第6到第11乘法器6c,6d以及7d到7g,以及一次滞后滤波器8。
有功功率差分ΔP被加于第5加法器4e。第五加法器4e计算估算的有功功率差分ΔPs和实际的有功功率差分ΔP之间的偏差。所加得的结果由第8乘法器7d乘以L4,然后入给第一加法器4a,代替实际的有功功率差分ΔP。以同一方式,所加结果由第9乘法器7e乘以L5,然后输入给第四加法器4d。
在另一方面,第8加法器4h计算测量的角速度差分Δω和估算的角速度差分Δωs(第五积分器5a的输出)之间的偏差。所加以结果由第10乘法器7f乘以L6(反馈增益),然后反馈回第一加法器4a。所加结果也由第11乘法器7g乘以L7(反馈增益),然后反馈回连在第一和第二积分器5a和5b之间的第四加法器4d。
此外,第二积分器5b的输出Δδs由第二乘法器乘以K1,然后反馈给第6加法器4f。此外,第二积分器5b的输出Δδs由第7乘法器7d乘以K4,然后反馈回第7加法器4g。第7加法器4g计算乘法器6d的计算结果和发电机端电压差分ΔE之间的偏差,并通过二次滞后滤波器8和第6乘法器6c(具有一个输入增益K2)反馈回第6加法器4f。
在这实施例中,因为使用了称作“发电机动态稳定块”的模块,所述能够在上述实施例中最精确地表示波动方式,只要初始设定的系统条件不变。此外,虽然实际值和估算突起值之间的偏差被用于角加速度差分Δa和角速度差分Δω,但两者之间的偏差也可用于校正一次滞后滤波器8的状态。在这种情况下,可以容易地获得反馈增益,象卡尔曼滤波器那样。
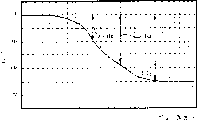
图6至图8为利用角加速度观测器1从短周期(高频)到长周期(低频)作为实际的角加速度(a)的模拟结果所获得的估算的角加速度(as)。图6表示虽在短周期中(高频)估算值(as)的幅值略微小于测量值(a)的幅值,但两者的相位都很好地吻合。另外,图7表示中周期(中频)的模拟结果,图8表示长周期(低频)的模拟结果。在两种情况下,可以高精度估算幅值和相位。如上所述,在第四实施例中,可以用高精度估算角加速度(as)。
如上所述,在按照本发明的发电机的功率稳定装置中,因为角加速度差分Δa可以和角速度差分Δω同步地估算,并且因为电压调节信号e可以根据估算的角加速度变化率Δas获得,便可以在发电机负载变化时最有效地抑制功率波动,而不须任何不必要的功率稳定装置的控制。
此外,甚至当功率波动周期长至0.3Hz时,也存在显著的效果,使得长周期的功率波动可被有效地阻尼,因为重调滤波器的重调时间也被确定得较长。
[第二方面]
下面参照图9至图13说明本发明的功率稳定装置的第二方面。在第二方面中,由多个角加速度观测器构成的多方式观测器相应于多个预定的功率波动方式设置。
(第一实施例)
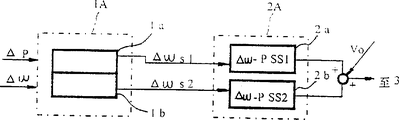
图9表示按照本发明的功率稳定装置的第二方面的第一实施例,它由多方式观测器1A和多方式功率稳定器电路2A构成,前者具有多个观测器1a到1n,后者具有多个功率稳定电路2a到2n。多个观测器1a到1n中的每一个被分配给多个功率波动方式中的每一方式(频率)。
使用有效功率差分ΔP,角速度差分Δω,以及频率差分Δf作为稳定器信号差分。因此,根据至少这些稳定器信号差分中的一个,每个观测器1a到1n分别计算估算的有效差分ΔPs1到ΔPsn,估算的角加速度差分Δas1到Δasn,估算的角速度差分Δωs1到Δωsn以及估算的频率差分Δfs1和Δfsn中的一个。
多方式功率稳定器电咱2A的功率稳定的电路2a到2n以各自对应的关系提供给多方式观测器1A的观测器1a到1n,用来根据估算的有效差分ΔPs1到ΔPsn,估算的角加速度差分Δas1到Δasn,估算的角速度差分Δωs1到Δωsn以及估算的频率差分Δfs1到Δfsn中的至少一个,计算相应于多个功率波动方式中的每个的每个电压调节信号。
这些功率稳定器电路2a到2n的电压调节信号(输出)和目标电压V0由加法器4相加作为计算电压调节信号e,然后被送到自动电压调节器3。根据电压调节信号e和目标电压V0,自动电压调节器3控制发电机的激磁值,从而使发电机的端电压可以控制在目标电压V0。
这里,按照本发明的功率稳定装置,多方式观测器1A再现几个功率波动。更详细地说,多方式观测器1A具有这样的功能,即计算估算的有功功率差分ΔPs,估算的角加速度差分Δas,估算的角速度差分Δωs,和估算的频率差分Δfs,每个相应于每一功率波方式;计算估算的有功功率差分ΔPs和测量的实际功率差分信号ΔP之间的偏差,计算估算的角加速度差分Δas和测量的角加速度差分信号Δa之间的偏差,计算估算的角速度差分Δωs和测量的角速度差分信号Δω之间的偏差,以及计算估算的频率差分信号Δfs和测量的频率差分信号Δf之间的偏差;并把由每个增益乘以每个偏差信号后反馈到每个观测器1I的每个输入侧。如上所述,多方式观测器1A可以单独且同时检测多个功率波动方式中的每一个(没有任何相位滞后)。
例如,正如参照图2所示的,每个观测器1I包括第一加法器4a,它响应有功功率差分ΔP和其它的反馈信号,用来计算估算的角加速度差分Δas;第一积分器5a,用来积分估算的角加速度差分Δas,从而获得角速度差分Δωs;第二积分器5b,用来积分估算的角速度差分Δωs;从而获得估算的相位差角差分Δδs;第一乘法器6a,用来用一常数D乘以角速度差分,从而获得估算的阻尼力(系数)DΔωs;以及第二乘法器6b,用来乘以估算的相位差角差分Δδs一个常数K1,从而获得估算的有功功率差分ΔPs,等等。此外,每个观测器1i包括第二加法器4b,用来计算有功功率差分ΔP和估算的有功功率差分ΔPs之间的偏差;以及第三乘法器7a,用来用一常数K1乘以计算的偏差,把乘得的偏差信号反馈回第一加法器4a。
如上所述,在上述的功率波动再现电路中,可以有效地并精确地估算低频燥声,因为该电路不工作在其主振荡方式之外的方式下。另外,和带通滤通器不同,相位几乎不被滞后。因此,在具有相应于每个基本功率波动方式的观测器1i的多方式观测器1A中,可以精确地检测每种方式,而不受其它方式的影响并且没有相位滞后。
这里作为多方式观测器1A的一个例子,下面说明具有三个观测器1a,1b和1c和三个功率稳定电路2a,2b和2c的电力稳定装置。在这例子中,观测器1a用于低于0.5Hz的振范频率的低频功率波动;观测器1a用于低于0.5Hz的振荡频率的低频功率波动;观测器1b用于大Hz的振荡频率的中频功率波动;以及观测器1c用于高于2Hz的振范频率的高频功率波动。
在实际中,最好低频功率波动方式观测1a被设定为0.3Hz振荡频率方式;中频功率波动方式观测器1a被设定为1Hz振荡频率方式;高频功率波动观测器1a被设定为3Hz振范频率方式。
因此,在这种情况下,DeMello/(Concordia模型的参数K1,K2,…,K6以及阻尼比D对于三个功率波动方式中的每一个被合适地确定为独立的(0.3,1和3Hz)。一般地,因为这些参数由系统阻抗函数表示,所以三个振荡频率可通过合适地决定这些系统的阻抗确定。当这一模型适用时,对每一方式可以建立如下关系:
Δa=-ΔTe-DΔω
ΔTe=K1Δδ+K2E′q
其中:
Δa:发电机的角加速度差分
Δω:发电机的角速度差分
Δδ:相位差角差分
U:PSS的输出
ΔTe:电扭矩变化率
E′q:q轴瞬变反电压
D:阻尼常数
M:惯性常数
T′do:磁场电路的瞬变常数
K1-KAVR:常数
上述公式可被整理成下面的状态方程:
Xi=AiXi+BiUi
Yi=CiXi 其中,X表示状态值;Y表示观测值;u表示PSS的输出。此外,A、B和C是按每一方式确定的常数矩阵。另外,下标i代表方式种类。
上述公知已作为一种方式的状态方程被建立了。不过,在本实施例中,因为有三种功率波动方式(0,3,1和3Hz),对于多方式观测器1所用的部功率波动方式,状态方式可以表示如下:
X=Ax+Bu
Y=Cx
因此,多方式观测器1可根据上述的状态方程表示如下:Xs=AXs+Bu+L(y-CXs)
其中x代表状态值;y代表观测值;L代表表示观测器的反馈增益的9(行)×2(列)矩阵。虽然这矩阵不象Kalman滤波器那样被计算,但也可以这样确定矩阵,即使估算的值集中在一起。具体地说,当难于调节9(行)×2(列)矩阵的所有元素时,L可用这种方式确定,即只校正发电机的基本状态(例如加速度差分Δa或角速度差分Δω)。在上述的结构的功率稳定装置中,各个功率波动方式的各个估算的加速度差分Δasi(i=1,2,3)和估算的速度差分Δωsi(i=1,2,3)被从多方式观测器1A中取出,然后被送到被调节为最佳状态的各个功率稳定器电路2A。这就是说,被调节到0.3Hz功率波动方式的功率稳定器电路2a按照计算的速度差分Δωs1操作。在另一方面,被调节到1到3Hz功率波动方式的两个功率稳定器电路2b和2c分别按照估算的加速度差分Δas2和Δas3操作。三个功率稳定的电路这样调节的理由如下:
此处考虑单个发电机连接于无穷大母线系统的情况。从PSS的输出到电扭矩差分ΔTe的传递函数是滞后的,如图10(a)和10(b)所示,它们是表示磁场电路的传递特性的波德图。图10(a)是增益-频率特性,图10(b)是相位-频率特性。因为如上所述,磁场电路是滞后的,可以通过补偿这一滞后获得反抗功率波动的阻尼力(系数),这就是说,通过这样改变电扭矩差分ΔTe,使其和角速度差分Δω同步。因而,按照功率波动的周期(频率),最佳相位偿不同。另外,过分大的相位补偿并不好,因为高频噪声也被放大了。因此,角加速度差分Δa(其相位超前角速度差分Δω90°)被用于功率稳定电路2b和2c(对1和3Hz的高频方式提供的),它们分别需要大的相位补偿(见图10(b)),以便减小大的超前相位的补偿程度。在另一方面,角速度差分Δω被用于功率稳定器电路2a(为0.3Hz的低频方式提供的),它不需要大的相位补偿(见图10(b))。当这三个功率稳定器电路2a,2b和2c的三个输出被加法器4相加时,便可以获得最后的电压调节信号e。如上所述,在上述的功率稳定装置中,这样提供一组观测器1A和一组观测器电路1B,使得可以在最佳条件下阻尼任何频率方式(通常被考虑的)的系统的波动。
(第二实施例)
图11表示按照本发明的功率稳定装置的第二方面的第二实施例。在本实施例中,多方式观测器1A由用于观测发电机电波动的功率波动方式观测器1a和用于观测发电机机械振动的机械振动方式观测器1b构成。这是因为有这样的情况,即在有功功率差分ΔP中不仅有电力波动而且有机械波动(振动)。在这种情况下,只有需要被除去的机械波动被从有功功率差分ΔP中分离出来作为机械振动分量。结果,就可以除去由于机械振动而产生的高谐波噪声,至今这种噪声在ΔωPSS或ΔfPSS中一直引起问题。
更详细地说,多方式观测器1A的观测器1a分离包括在发电机功率波动中的电力(电的)波动,计算相应于所述电力波动的估算的角速度差分Δωs1,并将其输出到多方式功率稳定电路2A(Δω-PSS)的稳定器电路2a。以同一方式,多方式观测器1A的观测器1b分离包括在发电机的功率波动中的机械振动,计算相应于所述机械振动的估算的角速度差分ΔωS2,并将其输出到多方式功率稳定10电路2A(Δω-PSS)的稳定器电路2b。在这种情况下,由观测器1a计算的功率波动的频率被设为1Hz或3Hz,由观测器1b计算的机械振动频率被设为例如5Hz或更高。在这种情况下,机械振动方式的传递函数一般可用下式表示:
这里,以和第一实施例的情况相同的方式,电力波动方式和机械振动方式彼此结合,从而获得一个状态方程,并根据结合的方式构成多方式观测器1A。按上述构成的多方式观测器1A估算估算的角速度变化率Δωs,并把它输入给Δω-PSS。在这一实施例中,机械振动被从功率波动中分离出来,并因此可以获得估算的角速度变化率Δωs,其中包括极小的机械噪声分量。
结果,可以解决至今在常规的Δω-PSS中存在的这样的问题,即当为补偿磁场电路的滞后而用大的超前角进行相位校正时,包含在角速度差分Δω中机械噪声被放大,从而引起发电机轴振动。
在上述的第二实施例中,虽然Δω-PSS被用作功率稳定器电路2A,但上述同样的情况可以应用于使用频率差分Δf的Δf-PSS。此外,一般地说,虽然功率波动方式的频率为1Hz,但存在这样的情况,即当两个相邻发电机之间的阻抗低时,大约3Hz振动会引起问题。在这种情况下,第二实施例是有效的,尤其是因为功率波动方式可从机械振动方式中分离出来或反之亦然(至少在现有技术中的功率稳定装置中是不可能的)。
(第三实施例)
图12表示本发明的第二方面的第三实施例。该实施例的特点是,对于电力波动(在相当低的频率方式中)使用角速度差分功率稳定器电路(Δω-PSS)2a,对于机械振动(相当高的频率方式),使用有功功率差分功率稳定电路(Δ-PSS)2b。根据Δωs的Δω-PSS 2a被设定为大约1Hz的功率波动方式,根据Δas的ΔP-PSS被设为3Hz的机械振动方式。这是因为,当振动频率为3Hz时,适用于采用基于Δas的ΔP-PSS(它相对于Δω超前90度),因为需要大的相位超前角补偿(大约90度,见图10(b))。换句话说,因为在3Hz时补偿在的相位超前角难于用Δω-PSS执行,所以大约3Hz的短周期的波动被分离出来并由ΔP-PSS进行补偿,ΔP-PSS不要求大的相位超前角。
总之,在第三实例中,多方式观测器1A由用来观测大约1Hz的功率波动的第一观测器1a和用来观测大约3Hz的机械振动的第二观测器16构成。
由第一观测器1a获得的估算的角速度差分Δωs被送到多方式功率稳定电路2的角速度差分功率稳定电路(Δω-PSS)2a,由第二观测器1b获得的估算的角加速度差分Δas被送到多方式功率稳定电路2的有功功率变化率功率稳定器电路(ΔP-PSS)2b。
结果,对于机械的和电气的两种振动,都能在最佳条件下实现相位补偿,因为大约3Hz的机械振动(它需要大的相对超前角补偿)可以被分离出来,并且因为被分离的短周期的机械振动可由ΔP-PSS进行补偿(它不需要大的相位超前角补偿)。
(第四实施例)
图13表示本发明第二方面的第四实施例。在此实施例中,在多方式观测器1A中提供有开关装置9A,用来选择与多个功率波动方式相应设置的多个观测器1a到1n之一,此外,在多方式功率稳定器电路2A中提供有另一个开关装置9B,用来选择相应于选择方式的多个稳定器电路2a到2n中的合适的一个,这两个开关装置9A和9B形成多路互锁开关。
在实际的发电机运行中,存在一种情况,即不需要观察多个功率波动方式。尤其是当在发电机运行中实际上不观察许多电力波动方式或许多机械振动方式时,按照情况,只选择所需要的频率方式是合适的,因为对于每种振动或波动方式者都需要复杂的计算。因此,当开关装置9A和9B被提供用来消除不需要的方式时,可以实现进一步优化的功率稳定装置。
如上所述,在本发明的第二个方面中,可使用多方式观测器分离功率波动方式,从而使得可以按照所需的功率波动方式或情况,提供最佳的多方式功率稳定系统,因此,总能获得使功率稳定的最佳相位补偿。此外,在所有相间总能获得最佳的增益。
另外,因为多方式观测器由电力波动观测器和机械波动观测器构成,以便使电力波动和机械波动彼此分离,就能够有效地减少至今包含在功率波动方式的角速度差分Δω或频率差分Δf中的机械噪声。
Claims (19)
1.一种用于发电机的功率稳定装置,用来向自动电压调节器(3)输入电压调节信号(e),作为辅助信号用来把发电机的端电压控制在目标电压(Vo),该装置包括:
功率稳定器电路(2),用以计算加到该自动电压调节器(3)的校正电压调节信号(e);
其特征在于还包括:
角加速度观测器(1),用来根据发电机的至少一种稳定信号差分计算发电机估算的角加速度差分(Δas);以及
该功率稳定器电路(2)根据由所述角加速度观测器(1)计算的估算的角加速度的差分值(Δas)计算所述校正电压调节信号(e)。
2.如权利要求1的发电机的功率定装置,其特征在于所述的发电机的稳定信号差分包括有功功率差分(ΔP)和角速度差分(Δω)。
3.如权利要求2的电发机的功率稳定装置,其特征在于所述角加速度观测器(1)包括:
估算的角加速度差分计算装置(11),用来根据有功功率差分(ΔP)计算估算的角速度差分(Δωs),估算的相位差角差分(Δωs),估算的阻尼力(DΔωs),以及估算的有功功率差分(ΔPs),从而获得用于再现功率波动的估算的角加速度差分(Δas);以及
有功功率差分反馈装置(12),用来计算有功功率差分(ΔP)和估算的有功功率差分(ΔPs)之间的偏差信号,并用于反馈计算的偏差信号到所述角加速度差分估算装置(11)。
4.如权利要求3的发电机的功率稳定装置,其特征在于所述估算的角加速度差分计算装置(11)包括:
第一加法器(4a),响应有功功率差分(ΔP)和反馈信号,用来计算估算的角加速度差分(Δas);
第一积分器(5a),用来积分估算的角加速度差分,从而获得角速度差分(Δωs);
第二积分器(5b),用来积分估算的角加速度差分(Δωs),从而获得估算的相位差角差分(Δδs);
第一乘法器(6a),用来用一常数(D)乘以角速度差分(Δωs),从而获得估算的阻尼力(DΔωs);以及
第二乘法器(6b),用来用一常数(K1)乘以估算的相位差角差分(Δδs),从而获得估算的有功功率(ΔPs)。
5.如权利要求4的发电机功率稳定装置,其特征在于所述功功率差分反馈装置(12)包括:
第二加法器(4b),用来计算有功功率差分(ΔP)和估算的有功功率差分(ΔPs)之间的偏差;以及
第三乘法器(7a),用来用一常数(L1)乘法计算的偏差,并把乘得的偏差信号反馈给所述估算的角加速度差分计算装置(11)的所述的第一加法器(4a)。
6.如权利要求4的发电机的功率稳定装置,其特征在于还包括角速度差分反馈装置(13),它包括:
第三加法器(4c),用来计算实际的角速度差分(Δω)和估算的角速度差分(Δωs)之间的偏差;以及
第四乘法器(7b),用来用一常数(L2)乘以计算的偏差,并把被乘的偏差反馈给所述估算角加速度差分计算装置(11)的所述第一加法器(4a)。
7.如权利要求4的发电机的功率稳定装置,其特征在于还包括角速度差分反馈装置(13),它包括:
第三加法器(4c),用来计算实际的角速度差分(Δω)和估算的角速度差分(Δωs)之间的偏差;
第四加法器(4d),连接在所述第一积分器(5a)和所述第二积分器(5b)之间;以及
第五乘法器(7c),用来用一常数(L3)乘以计算的偏差,并把被乘过的偏差反馈给所述估算角加速度差分计算装置(11)的所述第四加法器(4d)。
8.如权利要求4的发电机的功率稳定装置,其特征在于还包括角速度差分反馈装置(13),它包括:
第四加法器(4d),连接在所述第一积分器(5a)和所述第二积分器(5b)之间;
第八加法器(4h),用来计算实际的角速度差分(Δω)和估算的角速度差分(Δωs)之间的偏差;
第十乘法器(7f),用来用一常数(L6)乘法计算的偏差,并把乘得的偏差反馈回所述估算的角加速度差分计算装置(11)的所述第一加法器(4a);
第十一乘法器(7g),用来用一常数(L7)乘以计算的偏差,并把乘得的偏差反馈回所述估算角加速度差分计算装置(11)的所述第四加法器(4d)。
9.如权利要求8的发电机的功率稳定装置,其特征在于还包括:
第五加法器(4e),用来计算有功功率差分(ΔP)和估算的有功功率差分(ΔPs)之间的偏差;
第八乘法器(7d),用来用一常数(L4)乘以计算的偏差,并把乘得的结果加于所述第一加法器(4a);以及
第九乘法器(7e),用来用一常数(L5)乘以计算的偏差,并把乘得的结果加到所述第四加法器(4d)。
10.如权利要求9的发电机的功率稳定装置,其特征在于还包括:
第七乘法器(6d),用来用一常数(K4)乘以估算的相位差角差分(Δδs);
第七加法器(4g),用来计算发电机电压差分(ΔE)和被乘的相位角差(Δδs×K4)之间的差;
一次滞后滤波器(8),用来滞后所述的计算的差;
第六乘法器(6c),用来用一常数(K2)乘以滞后的结果;以及
第六加法器(4f),用来加所乘的滞后结果和估算的有功功率差分(PS),并把加得的结果加到所述第一加法器(4a)。
11.一种发电机的功率稳定装置,用来向自动电压调节器输入电压调节信号(e),作为辅助信号,用来控制发电机的端电压为目标电压(Vo),该装置包括:
功率稳定器电路,用以计算加到该自动电压调节器(3)的校正电压调节信号(e);其特征在于:
多个观测器(1A),每个被分配给发电机输出波动频率的每一个,用来对于每一波动频率根据发电机的稳定信号差分中的至少一个计算下述量中的至少一个:估算的角加速度差分(Δas),估算的角速度变化率(Δωs),估算的有功功率差分(ΔPs)以及估算的频率差分(Δfs);
该功率稳定器电路包括:
多个功率稳定器电路(2A),每个被分配给所述多个观测器(1A)中的每个,用来对于每一波动频率计算每个电压调节信号,根据下列量中的至少一个进行所述计算:估算的角加速度差分(Δas),估算的角速度差分(Δωs),估算的有功功率差分(ΔPs)以及估算的频率差分(Δfs);以及
加法器(4),用来加计算的电压调节信号,所加的电压调节信号(e)被施加给自动电压调节器(3),作为校正电压调节信号(e)。
12.如权利要求11的发电机的功率稳定装置,其特征在于所述发电机的稳定信号变化率是:有功功率差分(ΔP),角速度差分(Δω),以及频率差分(Δf)。
13.如权利要求11的功率稳定装置,其特征在于所述多个观测器(1A)是:用来再现低频波动频率方式的第一观测器,用来再现中频波动频率方式的第二观测器和用来再现高频波动频率方式的第三观测器。
14.如权利要求13的功率稳定装置,其特征在于所述低频是0.5Hz或更低,中频是大约1Hz,高频是2Hz或更高。
15.如权利要求14的功率稳定装置,其特征在于低频是0.3Hz,中频为1Hz,高频为3Hz。
16.如权利要求11的功率稳定装置,其特征在于所述多个观测器(1A)是:用于再现第一频率的电波动频率方式的第一观测器,以及用于再现第二频率机械振动频率方式的第二观测器。
17.如权利要求16的功率稳定装置,其特征在于所述第一频率为3Hz或更低,第二频率为5Hz或更高。
18.如权利要求11的功率稳定装置,其特征在于所述用来估算角速度差分(Δωs)的观测器被分配给较低频率波动方式,并和角速度差分型(Δω-PSS)的所述功率稳定器电路相关;以及所述用于估算角加速度差分(Δas)的所述观测器被分配给较高频率波动方式,并和有功功率差分型(ΔP-PSS)的所述功率稳定电路相关。
19.如权利要求11的功率稳定装置,其特征在于还包括多个开关装置(9A,9B),每个被分别分配给所述观测器和所述功率稳定器电路中的每个,用来选择至少一个所述观测器和至少一个所述相应的功率稳器电路。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP304246/1994 | 1994-11-15 | ||
| JP30424694A JP3305899B2 (ja) | 1994-11-15 | 1994-11-15 | 発電機の電力安定化装置 |
| JP31610594A JP3311881B2 (ja) | 1994-11-28 | 1994-11-28 | 電力安定化装置 |
| JP316105/1994 | 1994-11-28 | ||
| JP316105/94 | 1994-11-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1130320A CN1130320A (zh) | 1996-09-04 |
| CN1053773C true CN1053773C (zh) | 2000-06-21 |
Family
ID=26563837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN95118862A Expired - Fee Related CN1053773C (zh) | 1994-11-15 | 1995-11-14 | 发电机的电力稳定装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5698968A (zh) |
| EP (1) | EP0713287B1 (zh) |
| KR (1) | KR0185464B1 (zh) |
| CN (1) | CN1053773C (zh) |
| DE (1) | DE69504457T2 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107070332A (zh) * | 2017-03-29 | 2017-08-18 | 广西大学 | 基于平方和分解技术的发电机l2鲁棒综合控制方法 |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9610265D0 (en) * | 1996-05-16 | 1996-07-24 | Univ Manchester | Generator transfer function regulator |
| JP4034397B2 (ja) * | 1998-01-13 | 2008-01-16 | 中部電力株式会社 | 系統安定化装置 |
| JP3464384B2 (ja) * | 1998-06-03 | 2003-11-10 | 三菱電機株式会社 | 制御信号処理装置及び制御信号処理装置を用いた電力系統安定化装置 |
| JP3435066B2 (ja) * | 1998-07-31 | 2003-08-11 | 三菱電機株式会社 | 電力系統安定化装置及び電力系統安定化方法 |
| US6208120B1 (en) * | 1999-05-03 | 2001-03-27 | Eaton Corporation | Excitation control system for rotating electrical apparatus |
| US6204642B1 (en) | 1999-08-06 | 2001-03-20 | General Electric Company | Method and apparatus for modifying limit and protection software in a synchronous generator exciter to match the capability of the turbine-generator |
| TR200200656T2 (tr) * | 1999-09-13 | 2002-06-21 | Wobben Aloys | Reaktif gücü kontrol etme metodu ve elektriksel bir şebekede elektrik enerjisi elde etme cihazı |
| JP2001125690A (ja) * | 1999-10-26 | 2001-05-11 | Mitsubishi Electric Corp | マイクロコンピュータの誤動作防止装置及びマイクロコンピュータの誤動作防止方法 |
| JP3795783B2 (ja) * | 2001-09-21 | 2006-07-12 | 三菱電機株式会社 | 電圧安定化制御方法 |
| US6819087B2 (en) * | 2002-12-27 | 2004-11-16 | General Electric Company | Distributed resource (DR) stabilization control for microgrid applications |
| US7239113B2 (en) * | 2005-05-03 | 2007-07-03 | Caterpillar Inc | Method for reducing undesired currents in an electrical power generation system |
| CN100349352C (zh) * | 2005-12-09 | 2007-11-14 | 天津理工大学 | 模糊式电力系统稳定器参数自寻优方法与自寻优装置 |
| US7808215B2 (en) * | 2007-07-02 | 2010-10-05 | Hamilton Sundstrand Corporation | Active damping for synchronous generator torsional oscillations |
| FI121644B (fi) * | 2008-03-03 | 2011-02-15 | Waertsilae Finland Oy | Värähtelyn vaimennusjärjestely |
| US8203316B2 (en) | 2008-12-18 | 2012-06-19 | Hamilton Sundstrand Corporation | Eddy current torsional damper for generator |
| CN101599680B (zh) * | 2009-04-03 | 2011-08-17 | 隆发建筑机械(上海)有限公司 | 双焊枪直流弧焊发电两用机 |
| US8248038B2 (en) * | 2009-05-27 | 2012-08-21 | Empire Technology Development Llc | Synchronous generator protection |
| CN102420559B (zh) * | 2011-11-01 | 2013-11-06 | 南方电网科学研究院有限责任公司 | 基于系统辨识和遗传算法的发电机广域阻尼控制方法 |
| DE102013204600A1 (de) | 2013-03-15 | 2014-09-18 | Senvion Se | Windkraftanlage mit Frequenzmessung |
| CN107048962B (zh) * | 2013-11-30 | 2019-01-18 | 苏州德沃智能系统有限公司 | 智能邮箱、智能邮箱系统及相关方法 |
| US9771823B2 (en) * | 2014-06-26 | 2017-09-26 | General Electric Company | Power generation system control following transient grid event |
| JP6397760B2 (ja) * | 2014-12-26 | 2018-09-26 | 株式会社日立製作所 | 電力系統安定化装置および方法 |
| JP6316500B2 (ja) * | 2015-03-09 | 2018-04-25 | 株式会社日立製作所 | 電力系統安定化システム |
| CN104776989B (zh) * | 2015-03-27 | 2017-07-28 | 苏州井上橡塑有限公司 | 汽车干净空气管功能验证装置 |
| US10656609B2 (en) * | 2017-04-27 | 2020-05-19 | Massachusetts Institute Of Technology | Plug-and-play reconfigurable electric power microgrids |
| KR102680896B1 (ko) * | 2020-07-14 | 2024-07-04 | 한국전력공사 | 전력계통 안정화 장치의 제어정수 자동선정 장치 및 그 방법 |
| US11942891B2 (en) | 2021-06-15 | 2024-03-26 | Kohler Co. | Dynamic frequency to voltage ratio for regulator machine |
| FR3141572A1 (fr) * | 2022-10-26 | 2024-05-03 | General Electric Company | Systèmes et procédés pour un stabilisateur de système électrique (pss) adaptatif |
| FR3141573A1 (fr) * | 2022-10-26 | 2024-05-03 | General Electric Company | Systèmes et procédés pour un stabilisateur de système électrique (pss) adaptatif |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4336486A (en) * | 1980-01-09 | 1982-06-22 | Westinghouse Electric Corp. | Dynamoelectric machines brushless supplemental excitation system |
| US4701689A (en) * | 1985-04-18 | 1987-10-20 | Huazhong Institute Of Technology | Optimal control power system stabilizer and method using simulating state variables |
| US5039932A (en) * | 1989-08-09 | 1991-08-13 | Sundstrand Corporation | Integrated variable reluctance generator for air frames |
| US5264778A (en) * | 1991-12-31 | 1993-11-23 | Westinghouse Electric Corp. | Apparatus protecting a synchronous machine from under excitation |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61280714A (ja) * | 1985-06-05 | 1986-12-11 | 三菱電機株式会社 | 電力系統安定化装置 |
| US4741023A (en) * | 1986-12-23 | 1988-04-26 | General Electric Company | On-line test and diagnostic system for power system stabilizer |
| JPS63240400A (ja) * | 1987-03-26 | 1988-10-06 | Toshiba Corp | 系統安定化装置 |
| JPH0697880B2 (ja) * | 1987-11-12 | 1994-11-30 | 株式会社日立製作所 | 同期機の励磁制御装置 |
| US4996519A (en) * | 1989-09-25 | 1991-02-26 | General Electric Company | Method and apparatus for monitoring an amplifier |
| US5300876A (en) * | 1990-05-11 | 1994-04-05 | Kabushiki Kaisha Toshiba | Power system stabilizer estimating a power system impedance |
| JP2738605B2 (ja) * | 1991-06-04 | 1998-04-08 | 三菱電機株式会社 | 磁石発電装置 |
| US5440222A (en) * | 1991-07-15 | 1995-08-08 | Mitsubishi Denki Kabushiki Kaisha | Excitation control apparatus for synchronous machine |
| US5483147A (en) * | 1992-07-10 | 1996-01-09 | Massachusetts Institute Of Technology | Decentralized excitation control for an electrical power utility system |
-
1995
- 1995-11-14 CN CN95118862A patent/CN1053773C/zh not_active Expired - Fee Related
- 1995-11-15 DE DE69504457T patent/DE69504457T2/de not_active Expired - Fee Related
- 1995-11-15 KR KR1019950041439A patent/KR0185464B1/ko not_active Expired - Fee Related
- 1995-11-15 EP EP95117995A patent/EP0713287B1/en not_active Expired - Lifetime
- 1995-11-15 US US08/559,486 patent/US5698968A/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4336486A (en) * | 1980-01-09 | 1982-06-22 | Westinghouse Electric Corp. | Dynamoelectric machines brushless supplemental excitation system |
| US4701689A (en) * | 1985-04-18 | 1987-10-20 | Huazhong Institute Of Technology | Optimal control power system stabilizer and method using simulating state variables |
| US5039932A (en) * | 1989-08-09 | 1991-08-13 | Sundstrand Corporation | Integrated variable reluctance generator for air frames |
| US5264778A (en) * | 1991-12-31 | 1993-11-23 | Westinghouse Electric Corp. | Apparatus protecting a synchronous machine from under excitation |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107070332A (zh) * | 2017-03-29 | 2017-08-18 | 广西大学 | 基于平方和分解技术的发电机l2鲁棒综合控制方法 |
| CN107070332B (zh) * | 2017-03-29 | 2018-11-09 | 广西大学 | 基于平方和分解技术的发电机l2鲁棒综合控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0713287B1 (en) | 1998-09-02 |
| EP0713287A1 (en) | 1996-05-22 |
| US5698968A (en) | 1997-12-16 |
| KR960018823A (ko) | 1996-06-17 |
| KR0185464B1 (ko) | 1999-05-15 |
| DE69504457D1 (de) | 1998-10-08 |
| DE69504457T2 (de) | 1999-02-18 |
| CN1130320A (zh) | 1996-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1053773C (zh) | 发电机的电力稳定装置 | |
| CN102782513B (zh) | 用于扭振减振的方法和装置 | |
| JP5344067B1 (ja) | 動力計システム | |
| US8242617B2 (en) | Method and arrangement for damping of tower-oscillations | |
| KR101822535B1 (ko) | 부유식 풍력 터빈의 틸트 댐핑 | |
| JP5304913B2 (ja) | ダイナモメータシステム | |
| EP2754889B1 (en) | Method and controller for damping vibrations in a wind power system | |
| CN1244059A (zh) | 电力系统稳定装置及电力系统稳定方法 | |
| CN105518989B (zh) | 锁相回路,发电机控制装置和用于控制混合动力机动车的电驱动系统的方法 | |
| JP2009540790A (ja) | 2重給電式非同期機に対する電流制限 | |
| CN112368477B (zh) | 用于控制风力涡轮机以减小机舱振动的方法和系统 | |
| WO2017014228A1 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2011172317A (ja) | モータ制御装置 | |
| WO2017188133A1 (ja) | 能動型騒音低減装置及び能動型騒音低減方法 | |
| JP6497408B2 (ja) | 電気慣性制御装置 | |
| US20210310900A1 (en) | Electric inertia control apparatus | |
| US4539845A (en) | Driving system for exciting a mechanical component at its resonant frequency for fatigue-testing purposes | |
| JP5439039B2 (ja) | 電力変換装置 | |
| JP2008304233A (ja) | 電気慣性制御方法 | |
| JPH04275086A (ja) | ダイナミック・シミュレータの制御装置 | |
| JP2010503370A (ja) | 減衰調節装置 | |
| JPH0998600A (ja) | 発電機励磁制御装置 | |
| JP3311881B2 (ja) | 電力安定化装置 | |
| CN110635730A (zh) | 一种柔性励磁系统的无功控制器、无功控制方法及系统 | |
| US11671043B2 (en) | Device and method for monitoring the torque of a brushless AC motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |