Die Erfindung betrifft ein Triebfahrzeug mit zumindest einem
Drehgestell mit quer an einem Träger angeordneten Fahrmotoren.
In einem Drehgestell eines Triebfahrzeugs werden die, insbesondere
quer angeordneten, Fahrmotoren an einem oder zwei
Mittelquerträgern positioniert. Die Drehmomentreaktionskräfte
dieser beiden Motoren wirken dabei jeweils in die gleiche
Richtung. Die Pendelmomentreaktionskräfte führen zu Schwingungen
des Drehgestells mit teilweise erheblichen Luftschallemissionen.
Diese Geräusche beeinträchtigen unter anderem den Fahrkomfort.
Es sind bereits viele Versuche unternommen worden, um
die auftretenden Schwingungs- und Geräuschprobleme zu beherrschen.
So ist es bekannt, dass Geräusch oder Schall bis zu
einem beträchtlichen Ausmaß gedämpft werden kann, entsprechend
der Wirkung von schwingungshemmenden oder Puffermaterialien
wie ein Gummipolster, eine Abdämmung oder dergleichen.
Diese Maßnahmen werden an geeigneten Stellen des Triebfahrzeugs
eingesetzt. Diese umfassen Fahrmotorbefestigungen und
Aufhängesysteme. Die schalldämpfenden bzw. schalldämmenden
Wirkungen dieser schwingungshemmenden Materialien sind lediglich
auf den individuellen schalldämpfenden oder isolierenden
Eigenschaften begründet. Um weitere Schallreduzierungen zu
erreichen, müssen die Eigenschaften individueller schwingungshemmender
Materialien verbessert werden und/oder die Anzahl
dieser Materialien vergrößert werden. Die erhaltenen
schalldämmenden bzw. schalldämpfenden Wirkungen dieser
schwingungshemmenden Materialien bleiben jedoch auf die Summe
der Einzelwirkungen dieser Materialien beschränkt.
Ein weiterer Vorschlag diese Geräusche zu dämpfen besteht darin,
die ausgesandten Schallwellen derartig zu modulieren,
dass eine Phasendifferenz auftritt, die zu einer Löschung der
Schallwelle führt.
So ist in der EP 0 618 564 A1 ein Verfahren beschrieben, mit
dem der ausgegebene Schall gemessen wird und über Lautsprecher
eine Schallwelle in Gegenphase ausgibt. Dieses System
bekämpft aber die bereits ausgegebenen Schallemissionen, so
dass insbesondere falls dieses System nicht exakt arbeitet
eine überhöhte Lärm- und Schallbelästigung auftritt.
Aufgabe der Erfindung ist es demnach, ein Drehgestell eines
Triebfahrzeugs zu schaffen, das bereits derartige Schallemissionen
im Vorfeld unterdrückt oder vermeidet.
Die Lösung der gestellten Aufgabe gelingt durch eine Ansteuerung
der Fahrmotoren eines Drehgestells, das folgende Merkmale
aufweist:
- eine gerade Anzahl von zur Fahrtrichtung quer angeordneten
Fahrmotoren,
- zumindest zwei Stromrichter zur elektrischen Speisung der
Fahrmotoren und
- elektrische Mittel, die Pendelmomentreaktionskräfte der
Fahrmotoren am Drehgestell kompensieren.
Die Pendelmomente in den Fahrmotoren entstehen aufgrund der
nicht-sinusförmigen Ausgangsspannungen des Stromrichters. Sie
weisen einen Frequenzbereich von wenigen 100 Hz bis zu einigen
1000 Hz auf. Dieser Frequenzbereich liegt im menschlichen
Hörbereich und wird somit als besonders störend empfunden.
Unter einem Querträger des Drehgestells für die Fahrmotoren
ist u.a. die Verbindung der Längsträger des Drehgestells zu
verstehen, der somit als Einzelträger oder aus mehreren parallelen
Einzelträgern aufgebaut sein kann.
Durch die Kompensation der Momentenreaktionskräfte der Fahrmotoren
am Drehgestell reduzieren sich die Auswirkungen der
Pendelmomente. Die Geräuschemissionen werden damit wirkungsvoll
unterdrückt. Es sind insbesondere die Pendelmomente störend,
die in der Nähe einer mechanischen Eigenfrequenz des
Drehgestells liegen.
Eine Kompensation dieser Kräfte wird insbesondere dadurch erreicht,
dass jeweils ein Fahrmotor eines Drehgestells eine
gegenüber dem anderen Fahrmotor dieses Drehgestells phasenversetzte
Ansteuerung aufweist. Es findet somit eine Einzelspeisung
der Fahrmotoren statt, mit einer gleichen Grundfrequenz
f1 und gleichen Halbleiter-Schaltimpuls-Zeitpunkten aber
einem zeitlichen Versatz der Impulse um vorzugsweise
Δt= 1 / 2 f 1 n oder um ein ungeradzahliges Vielfaches davon.
n ist dabei die Ordnungszahl derjenigen Pendelmomentkomponente,
dessen Reaktionskraft kompensiert werden soll (n·f1 =
Frequenz der Pendelmomentkomponente).
Geringe Änderungen des Wertes reduzieren die Wirksamkeit der
angestrebten Kräftekompensation.
Dieser grundfrequenzabhängige Versatz der Impulse wird dann
eingesetzt, wenn die Impulse synchron zur Grundfrequenz und
zur Phasenlage der Grundschwingung der Stromrichter-Ausgangsspannung
sind, im sogen. synchronen Pulsbetrieb.
Wenn dieser Synchronismus nicht gegeben ist, werden die
Stromrichter üblicherweise mit konstanter Schaltfrequenz fs
betrieben, dem sogen. asynchronen Pulsbetrieb. In dieser Betriebsweise
entstehen Pendelmomente mit m-facher Schaltfrequenz.
Zur weitest gehenden Kompensation der Reaktionskräfte
der zu kompensierenden Komponente beträgt der zeitliche Versatz
vorzugsweise
Δt = 1 / 2 fs m oder ein ungeradzahliges Vielfaches davon.
Geringe Änderungen des Wertes reduzieren die Wirksamkeit der
angestrebten Kräftekompensation.
In einer bevorzugten Ausführungsform sind die Befestigungspunkte
der Fahrmotoren an einem Träger des Drehgestells derart
angeordnet, dass sie bezüglich der Fahrtrichtung des
Triebfahrzeugs hintereinander liegen. Damit wird die Wirksamkeit
der erfindungsgemäßen Kompensation der Momentreaktionskräfte
wesentlich erhöht, da eine Aufhebung der geräuschbildenden
Kräfte bereits am Träger des Drehgestells geschieht.
Vorteilhafterweise erreicht man, wenn die Getriebe der Fahrmotoren
eines Drehgestells auf der gleichen Seite liegen,
dass die Aufhängungspunkte der Fahrmotoren an dem Träger unabhängig
von der Länge der Fahrmotoren exakt hintereinander
liegen und somit zur Momentenkompensation einfache Zug-Druckstangen
einsetzbar sind.
Die Wirksamkeit der Momentenkompensation wird durch die konstruktiven
Maßnahmen gemäß den weiteren Unteransprüchen zusätzlich
erhöht.
Die Erfindung sowie weitere vorteilhafte Ausgestaltungen der
Erfindung gemäß Merkmalen der Unteransprüche werden im folgenden
anhand schematisch dargestellter Ausführungsbeispiele
in der Zeichnung näher erläutert. Darin zeigen:
- FIG 1
- eine prinzipielle Darstellung eines Drehgestells in
Aufsicht,
- FIG 2
- eine prinzipiell dargestellte Gruppenschaltung von jeweils
zwei Fahrmotoren zweier Drehgestelle,
- FIG 3
- Seitenansicht eines Drehgestells und
- FIG 4
- eine weitere Seitenansicht eines Drehgestells,
- FIG 5
- eine prinzipielle Darstellung eines weiteren Drehgestells
in Aufsicht.
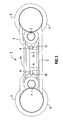
FIG 1 zeigt in prinzipieller Darstellung die Aufsicht eines
Drehgestells 1 eines nicht näher dargestellten Triebfahrzeugs.
Das Drehgestell 1 weist zwei Längsträger 2 auf, die
zwei Radsätze 3 führen. Jeder Radsatz 3 weist zwei darauf befindliche
Räder 4 auf, deren Abstand sich nach der Spurweite
des jeweiligen Triebfahrzeugs richtet. Die Längsträger 2 sind
durch einen Träger 5 verbunden. Dieser Träger 5 kann auch aus
mehreren parallelen Trägern 5 oder einer allgemeinen Befestigungskonsole
zwischen den Längsträgern 2 bestehen. An dem
Träger 5 sind über Befestigungspunkte 6 die jeweiligen Fahrmotoren
7 befestigt. Die Fahrmotoren 7 treiben die Radsätze 3
über jeweilige Getriebe 20 an. Die elektrische Speisung der
Fahrmotoren 7 erfolgt über nicht näher dargestellte Stromrichter.
Um die Reaktionskräfte der Drehmomente der Fahrmotoren
7 am Drehgestell 1 zu kompensieren, sind zum einen die
Befestigungspunkte 6 der jeweiligen Fahrmotoren 7 am Träger 5
in Fahrtrichtung hintereinander angeordnet. Zusätzlich werden
die Fahrmotoren 7 mit Einzelspeisung betrieben, d.h. es steht
jeweils ein Stromrichter zur Verfügung, der den Fahrmotor 7
speist. Entsprechend der gewünschten Grundfrequenz f1 und
Spannung werden die Halbleiterschalter des Stromrichters mit
einer nicht näher beschriebenen Folge von Impulsen, mit einem
sogenannten Pulsmuster, geschaltet. Beide Fahrmotoren 7 eines
Drehgestells 1 erhalten aus ihren jeweiligen Stromrichtern
eine Spannung mit derselben Grundfrequenz, demselben Pulsmuster,
aber einem zeitlichen Versatz der Schaltimpulse im synchronen
Pulsbetrieb um vorzugsweise
Δt = 1 / 2 f 1·n oder um ein ungeradzahliges Vielfaches davon,
wobei n die Ordnungszahl der
zu kompensierenden Pendelmomentkomponente ist.
Im asynchronen Pulsbetrieb beträgt der zeitliche Versatz der
Schaltimpulse vorzugsweise
Δt = 1 / 2 fs m oder um ein ungeradzahliges Vielfaches
davon, wobei fs die Schaltfrequenz des
Stromrichters und m der Quotient aus der
Frequenz der zu kompensierenden Pendelmomentkomponente
und der Schaltfrequenz ist.
Durch den zeitlichen Versatz der Schaltimpulse entwickeln
beide Fahrmotoren eines Drehgestells den gleichen Mittelwert
des Drehmomentes, aber ein jeweils gegenphasiges zu kompensierendes
Pendelmoment. Es erfolgt somit eine nahezu komplette
Aufhebung der zu kompensierenden Pendelmomentenkräfte am
Drehgestell, so dass die Geräuschemissionen erheblich reduziert
werden. Die Speisung der beiden Fahrmotoren 7 eines
Drehgestells wird somit vorzugsweise mit zwei Stromrichtern
betrieben.
Ein Triebfahrzeug gemäß FIG 2 weist zwei Drehgestelle 1, 1'
auf. Jeder der beiden Fahrmotoren eines Drehgestells wird an
einem Stromrichter A oder B betrieben, so dass man den oben
beschriebenen Effekt erzielen kann, indem man Fahrmotor 7.1
und Fahrmotor 7.3 an Stromrichter A, und Fahrmotor 7.2 und
Fahrmotor 7.4 an Stromrichter B betreibt. Damit lässt sich
ebenfalls eine phasenverschobene Ansteuerung realisieren und
eine Aufhebung einer Pendelmomentkomponente erreichen, ohne
dass jeder Fahrmotor einen eigenen Stromrichter benötigt. Damit
werden die Geräuschemissionen erheblich reduziert.
FIG 3 zeigt in Seitenansicht ein Drehgestells 1, das insbesondere
bei parallelen Trägern 5 ebenso zu einer Geräuschreduktion
durch die erfindungsgemäße Ansteuerung der Fahrmotoren
7 führt. Die Fahrmotoren 7 sind dabei nicht starr, sondern
drehelastisch an ihren jeweiligen Trägern 5 befestigt.
Dies geschieht z. B durch Sphärolager 12, die eine Gummischicht
zwischen zwei koaxialen Hülsen bilden um kleine Winkelbewegungen
zuzulassen. In allen anderen Richtungen verhält
sich dieses Lager 12 wie eine starre Befestigung. Damit ist
es jedem Fahrmotor 7 unmöglich Momentreaktionskräfte ins
Drehgestell 1 einzuleiten. Zur Aufnahme der Momentreaktionskräfte
werden die Fahrmotoren 7 untereinander mit einer oder
mehreren steifen Zug-Druckstangen 13 verbunden. Diese Stangen
13 sind nicht mit dem Drehgestell 1 verbunden und können somit
auch keine Kräfte in das Drehgestell 1 einleiten.
FIG 4 zeigt eine Abwandlung der Ausführung nach FIG 3. Die
Fahrmotoren 7 sind starr an einem gemeinsamen Fahrmotorträger
15 befestigt, der seinerseits mit dem Drehgestell 1 elastisch
verbunden ist. Auch damit wird bei der erfindungsgemäßen Ansteuerung
der Fahrmotoren 7 eine Reduktion der Geräuschemissionen
erreicht.
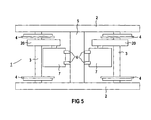
FIG 5 zeigt in einer weiteren prinzipiellen Darstellung die
Aufsicht eines Drehgestells 1 eines nicht näher dargestellten
Triebfahrzeugs. Das Drehgestell 1 weist zwei Längsträger 2
auf, die zwei Radsätze 3 führen. Jeder Radsatz 3 weist zwei
darauf befindliche Räder 4 auf, deren Abstand sich nach der
Spurweite des jeweiligen Triebfahrzeugs richtet. Die Längsträger
2 sind durch einen Träger 5 verbunden. Dieser Träger 5
kann auch aus mehreren parallelen Trägern 5 oder einer allgemeinen
Befestigungskonsole zwischen den Längsträgern 2 bestehen.
An dem Träger 5 sind über Befestigungspunkte 6 die jeweiligen
Fahrmotoren 7 befestigt. Die Fahrmotoren 7 treiben
die Radsätze 3 über jeweilige Getriebe 20 an. Die Getriebe
des Drehgestells der jeweiligen Radsätze liegen in Fahrtrichtung
des Triebfahrzeugs gesehen auf der gleichen Seite des
Fahrmotors 7. Somit wird erreicht, dass die Aufhängungspunkte
beider Fahrmotore 7 unabhängig von der Länge der Fahrmotoren
7 in Fahrzeuglängsrichtung exakt hintereinander liegen und
zur Momentenkompensation einfache Zug-Druckstangen eingesetzt
werden können. Damit wird insbesondere gegenüber FIG 1 Bauraum
eingespart, der vorteilhafterweise dem Fahrmotor 7 zugute
kommen kann.