EP1897799A2 - Dispositif de stabilisation dynamique d'un engin sous-marin - Google Patents
Dispositif de stabilisation dynamique d'un engin sous-marin Download PDFInfo
- Publication number
- EP1897799A2 EP1897799A2 EP07290867A EP07290867A EP1897799A2 EP 1897799 A2 EP1897799 A2 EP 1897799A2 EP 07290867 A EP07290867 A EP 07290867A EP 07290867 A EP07290867 A EP 07290867A EP 1897799 A2 EP1897799 A2 EP 1897799A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- wing
- axis
- roll
- machine
- rudder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B21/00—Tying-up; Shifting, towing, or pushing equipment; Anchoring
- B63B21/56—Towing or pushing equipment
- B63B21/66—Equipment specially adapted for towing underwater objects or vessels, e.g. fairings for tow-cables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/14—Control of attitude or depth
- B63G8/18—Control of attitude or depth by hydrofoils
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/14—Control of attitude or depth
- B63G8/26—Trimming equipment
Definitions
- the invention particularly relates to a roll stabilization system of a moving underwater vehicle.
- Stabilization solutions exist, which consist, for example, in equipping the machine with a tilt sensor and in piloting the guide / orientation means (actuators, control surfaces, wings, etc.) so as to actively enslave this roll. .
- An object of the invention is to provide a solution to all or some of these disadvantages.
- this method it is proposed to link functionally, by control means, said wing (and / or thus said rudder) free to a ballast itself free to rotate about an axis parallel to the plane containing the roll axis and the yaw axis, so that when the machine tilts around the roll axis, the relative angular displacement between the ballast and the body of the machine generates an action on the control means which causes the wing to pivot about its axis of rotation.
- the direction of the coupling between the displacement of the ballast and that of the wing is then such that the incidence it takes generates a torque tending to bring it back to said reference angular position of the machine corresponding to a reduced roll, gear being of course on the move.
- ballast pivoting around the roll axis, its movement coming to actuate said wing, or to modify the force, or even the orientation of the thrust of a thruster, so as to bring the machine close to his roll is zero.
- This control principle can be applied to one (or more) wing mounted free of rotation on its axis, disposed under the machine, and weighted in front of its axis so that, when the machine tilts on its axis of roll (The low wing rises), the torque created by this ballast rotates the wing about its axis, the leading edge then naturally moving downwards, causing an incidence to sting on the wing.
- This effect can also be obtained by using the torque of the Archimedes thrust on the wing, the volume being disposed mainly behind the axis of rotation.
- the device does not exclude a craft that does not would find its vertical position and at the place that dynamically, that is to say, when the machine is moving forward, its stopping position then being unspecified.
- the principle of the wing controlled by a ballast may also be used to generate forces: the free wing being for example placed in the lower position, it can be equipped with one or more other wings, motorized (or other actuators) ), intended to control the machine and arranged in the opposite half-space. In this case, it is possible to deliberately attempt to destabilize the craft by causing a couple of rolls. Under the effect of this rolling action, when the machine advances, the reaction of the lower wing is to rotate to create a torque opposing the torque of the actuators, and therefore a force along the lateral axis of the craft.
- the machine then stabilizes in a position close to the vertical, with a slight heel, and the wing provides a lateral force capable of modifying the trajectory of the craft: although not controlled, and free of rotation on its axis , the wing can participate in steering the craft.
- the invention also relates to the production of an underwater vehicle comprising, as known per se for example in US- 2005-0268835-A1 (whose description is included by reference), a body where the roll axis of the vehicle is located, and orientation means driven by actuators, to control the craft, but here with the particularity that the ballast will then be designed, mounted on the machine and located relative to its wing and / or its "associated" rudder so that, the machine advancing along its axis of movement, driven by the actuators, the ballast, under the effect of a roll, will rotate the wing (the rudder) to create a torque opposing the pair of means of orientation, and therefore a force along an axis transverse to the axis of displacement of the gear.
- an underwater vehicle comprising, as known per se for example in US- 2005-0268835-A1 (whose description is included by reference), a body where the roll axis of the vehicle is located, and orientation means driven by actuators, to control the craft, but here with the particularity that
- a machine according to the invention may, immersed and in motion, stabilize the position of one or more towed objects, to which it will be bound for that, in a specific application.
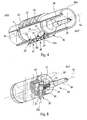
- a submerged underwater apparatus 1 according to the invention is used here to properly support and position a towed underwater object, in particular a towed linear acoustic antenna 3.
- the vehicle 1 comprises a hollow central body 5, and several wings rising around it, here three in number 7a, 7b, 7c ,.
- the body 5 has a longitudinal axis 5a corresponding to the axis of roll of the machine.
- This body comprises a fixed central portion 9 and an outer concentric shell 11 between which there is a possible relative rotation, about the axis 5a, of so that the wings can thus rotate around this axis, with the hull.
- the wings which extend along a transverse axis (here radial) to the axis 5a, are mounted individually pivotally about a pivot extending along their respective transverse axis of rotation, 13a, 13b, 13c.
- each wing is fixed towards its root, such as 17c for the wing 7c, to a pivot shaft (shaft 15c extending here radially, along the axis 13c, for the wing 7c).
- the radial shaft 15b passes through the outer shell 11 under which it is connected to a transverse leg 19 provided with a nipple or pin 21 which slides in the peripheral groove 23 of a ring 25 ( Figures 1 to 3).
- the ring 25 is traversed by two diametrically opposed holes 29 in each of which moves a finger 31 ( Figures 2 and 3).
- the finger 31 is an element of a radial eccentric device 33 driven by an angle gear 35 controlled by the output shaft 37 of an electric motor 39.
- the shaft 37 is controlled by a geared motor which rotates an axial screw 41 on which meshes the gear wheel with radial axis 43, thus defining the angle gear 35 ( Figure 5).
- the toothed wheel 43 is mounted on a radial shaft 45 which drives it in rotation.
- the shaft 45 is provided with an end eccentric, FIG.
- the assembly is identical for the wing 7a, with the ring 49 ( Figure 4).
- Two motors (see Figs.4,5: 39,39 ') and two actuator devices 29, 29', 31, 31 ', 37, 43, 39, 39' ... associated with the circular rings 25, 49, cause the wings 7a, 7b.
- the rotating rings 25, 49, and therefore the wings 7a, 7b, are shifted coaxially along the axis 5a.
- each wing can thus be adapted, either freely under the action of the outside and the ballast (wing 7c), or in a manner controlled by said motorized means (wings 7a, 7b ) here so called “actuators".
- actuators could be provided (cylinders ).
- the ballast 90 is mounted on the machine and located relative to the wing 7c, so that, the machine advancing along the roll axis 5a, a roll inclination of the wing will cause a couple tending to make pivoting this wing about its axis 13c, its leading edge 70c naturally oriented to cause an impact on the wing which will bring it back to said reference angular position of the machine thus corresponding to a reduced roll.
- the flange 7c will be located in a substantially vertical lower position and the two flanges 7a, 7b will be placed naturally in the upper position (above the body).
- the depth control will preferably be a local control using a pressure signal, as described in US-2005-0268835-A1 .
- the fixed central portion 9 of the body 5 is provided with first and second connection ends 53, 55.
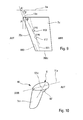
- the free wing 7c is located under the body and the ballast 90,900, carried here by this wing, is located in front of the pivot 13c (see front end noted AVT).
- the lower wing 7c tends to rise and the mass of its ballast tends to prick.
- the wing takes a negative impact producing a downward force, thus reducing the roll.
- the weighted free wing 7c is always shown at the bottom, and the roll to starboard is due to the thrust of the high wings 7b, 7c, that the lower wing compensates only when the inclination is sufficient, as explained below.
- the ballast 90 requires the wing to plunge as soon as it is sufficiently removed from its reference angular position corresponding to a "zero roll", which rectifies the machine.
- the hydrodynamic thrust center CPD materialized at 117, is preferably located behind the pivot axis 13c, for this wing 7c (see sides before AVT and rear ARR).
- this wing 7c see sides before AVT and rear ARR.
- the hydrodynamic force is such that it produces a roll torque opposite the torque created by the other wings, here 7a, 7b. This force also creates a rotational torque on the wing.
- the weight is in turn located in front of the axis 13c and produces a torque of rotation of the wing on its axis, which, in equilibrium, is opposed to that of the hydrodynamic force.
- FIG. 8 shows the line 111 for application of the hydrodynamic forces (thrust line) and locates at 113 the hydrodynamic thrust center (static, CPS).
- the center of thrust is situated on this line, at a position such that the surfaces on the root side and on the free end side of the wing are substantially equal.
- the equilibrium is reached when the torque of the weight is substantially equal to that of the hydrodynamic force, around the axis of the wing. The machine leans so until all these forces are balanced.
- the axis of rotation 13c is assumed vertical or at least perpendicular to the roll axis 5a.
- This inclination of the axis 13c by an angle other than 90 ° may allow the equilibrium angle of the wing at rest to be proportional to the heel of the craft and / or the damping by dynamic effect is even more effective.
- Tilting the axis 13c rearward and straightening the leading edge 70c of the wing can promote the damping of the oscillations when the machine produces lateral forces.
- Such inclination of the axis of rotation of the free wing may encourage placing the ballast at the wingtip, closer to its free end 700c, as fig.9 where the ballast is schematized 900 and is located just behind its leading edge.
- the free wing can be favorably made of composite material incorporating a foam.
- the buoyancy of the foam produces the same effect by buoyancy.
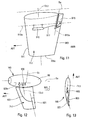
- Figures 10 to 19 show other possible embodiments, particularly in connection with the fact that the foregoing is applicable to a solution to rudder alone and / or wing provided with a rudder.
- the machine comprises only a wing 7c1 weighted at the front, for example 90 ', and mounted freely around its axis 13'c of pivoting relative to the central body 5' of the gear (roll axis 5'a). It may include some or all of the foregoing considerations.
- the body 5 'of the machine 10 may be monobloc.
- the ballast 910 is mounted on the wing 7c2, which pivots freely around its axis of rotation 13c2 which intersects the roll axis 5a which may be that of the body of the vehicle concerned, here not shown.
- the ballast 910 is mounted free of rotation about an axis 910a passing through the leading edges 911 and 913 of the wing.
- the ballast 910 is here placed towards the root of the wing, which carries a pivot shaft 13c2 axis.
- the ballast could be closer to the free end of the wing, or placed outside, for example beyond the wingtip.
- the wing carries the rudder 915 which is here pivotally mounted about an axis 915a parallel to the axis 13c2, along the trailing edge 913.
- the pivoting rudder 915 would advantageously be placed closer to the free end 700c.
- the ballast 920 and the rudder 915 are functionally interconnected by a control 917, such as a flexible cable or linkage, so that the pivoting of the ballast about its axis 910a, following a rolling action, acts on the 915 steering, or on the wing if it is itself pivotally mounted, to bring the machine to its reference angular position in roll and / or to participate in its orientation, when it advances (AVT) substantially parallel to the axis 5a, at a possible angle of skidding.
- a control 917 such as a flexible cable or linkage
- the ballast 920 has a direct effect on a rudder 921 pivotally mounted on and with respect to a wing 7c3 mounted on a machine body 50 with roll axis 5a.
- the wing 7c3 can be fixedly mounted on the body 50.
- wing 7c3 motorized steering wheel or fin 921 enslaved in roll by the ballast 920 operably linked to this rudder by the control 923.
- the command 923 can be one of those mentioned above.
- the ballast 920 is inside the body 50, to rotate freely along an angular sector, around the axis 920a parallel to the plane 925 containing the axis 5a and the yaw axis 5c, this characteristic being applicable to the case of Figures 11 or 14.
- FIGS. 14 and following show an indirect effect solution where a heel around the roll axis causes a rotation of rudder inducing a rotation, by variation of incidence, of the wing bearing this rudder and a reduction of the heel.
- the ballast 930 is placed in the body 51 of the machine 110.
- the ballast 930 which could be outside the body (likewise for the solution fig.12), pivots about an axis 930a parallel to 5a.
- a control of the aforementioned type, 931 transmits the effect of the ballast on the rear rudder 933.
- This rudder is pivotable relative to and behind the wing 7c4 which is free of rotation on and with respect to the body 51, about the axis 13c2 which intersects the roll axis 5a and passes through its root edges and free end.
- the axis 933a of the rudder 933 also intersects the axis 5a, but is not necessarily parallel to the axis 13c2.
- the pivoting shaft of the rudder along the axis 933a is carried by rods 935a, 935b fixed to the wing and extending behind its trailing edge 937.
- the wing 7c4 is here supposed to rotate freely about its axis 13c2, without being even subjected to the direct effect of any ballast.
- control 931 may comprise a cable, or for example a flexible rod 939 sliding in a sheath 941 and connecting on one side the control surface 933 (fig.14) and, on the other, by the intermediate of a pivot or ball 943, the ballast 930 which is pivotally mounted about its axis.
- the general equilibrium of the vehicle 110 is such that, if it advances substantially along the roll axis 5a of FIG. 14, it is naturally placed with the vertical free wing 7c4 and directed downward, directional force exerted.
- FIG. 16 shows what happens if the vehicle is lodged and that, consequently, the axis 13c2 of the wing 7c4 tilts with respect to the vertical: when the vehicle leans to port, the cable 939 is pulled . On the other hand, it is pushed if the gear is pitched to starboard, with the aforementioned effects.
- Figure 17 the machine advances in its position of Figure 15.
- the cable 939 and the wing 7c4 are in the neutral position.
- the wing and the rear rudder 933 can be oriented along the axis 5a of roll.
- an underwater vehicle equipped with a thruster such as a motor for driving at least one propeller, could be controlled at least partially by one of the ballast systems presented here. .
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Electric Cable Installation (AREA)
- Hydraulic Turbines (AREA)
- Other Liquid Machine Or Engine Such As Wave Power Use (AREA)
- Organic Low-Molecular-Weight Compounds And Preparation Thereof (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Vehicle Body Suspensions (AREA)
- Motor Or Generator Frames (AREA)
- Current-Collector Devices For Electrically Propelled Vehicles (AREA)
- Laying Of Electric Cables Or Lines Outside (AREA)
- Automatic Cycles, And Cycles In General (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Optical Communication System (AREA)
- Stereophonic System (AREA)
- Earth Drilling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
Description
- L'invention concerne en particulier un système de stabilisation en roulis d'un engin sous-marin en mouvement.
- Il est connu que des engins, autonomes, téléguidés ou remorqués, sont utilisés dans des applications sous-marines.
- Dans le cas d'un engin statique ou à déplacement lent, les positions respectives du centre de gravité, du centre de volume (point d'application de la poussée d'Archimède) et de l'axe éventuel de rotation (par exemple cas d'un engin remorqué), sont souvent telles que l'engin se positionne naturellement en position de roulis nul lorsqu'il est immergé, le couple de rappel ainsi créé vers la position verticale étant généralement suffisant pour assurer la stabilité de l'engin.
- Par contre, dans le cas d'un engin ayant une direction préférentielle de déplacement nommé ci-après « axe engin » et se déplaçant assez rapidement (quelques noeuds à plus de 10 noeuds) selon cet axe, les effets hydrodynamiques sur l'engin peuvent l'emporter sur les forces statiques de stabilisation décrites plus haut, et provoquer ainsi l'instabilité de l'engin.
- Des solutions de stabilisation existent, qui consistent par exemple à équiper l'engin d'un capteur d'inclinaison et à piloter les moyens de guidage/d'orientation (actionneurs, gouvernes, ailes...) de façon à asservir activement ce roulis.
- Ces systèmes présentent les inconvénients suivants :
- Nécessité de munir l'engin d'une source de courant (interne ou externe),
- Nécessité d'équiper l'engin d'un capteur d'inclinaison,
- Nécessité de disposer des actionneurs motorisés sur l'engin,
- Nécessité de créer une boucle d'asservissement,
- Consommation des actionneurs, souvent électriques,.
- Un objet de l'invention est d'apporter une solution à tout ou partie de ces inconvénients.
- Un autre but est de proposer l'utilisation d'un lest pouvant servir à la fois :
- de capteur d'inclinaison en roulis, par rapport à une position angulaire de référence, telle la verticale de l'endroit, et qui correspond à un roulis sensiblement nul,
- et de source mécanique d'asservissement en roulis.
- Selon un aspect, cette invention définit ainsi un procédé de contrôle de la navigation en immersion d'un engin sous-marin en déplacement, dans lequel:
- on monte au moins une aile (dans ce qui suit, on pourra lire, à la place, « gouverne ») libre de rotation autour d'un axe transversal à un axe de roulis de l'engin suivant lequel on le fait avancer sensiblement dans ladite direction, l'engin présentant, par rapport à son axe de roulis, une position angulaire de référence correspondant à un roulis sensiblement nul (c'est-à-dire limité à quelques degrés),
- on leste cette aile devant, respectivement derrière, son axe de rotation, et/ou on utilise le couple de la poussée d'Archimède sur cette aile, en situant l'essentiel de son volume derrière, respectivement devant, l'axe de rotation par rapport à la direction d'avance, de telle façon que lorsque l'engin, donc cette aile s'incline autour de l'axe de roulis, le couple créé par le lest et/ou ladite poussée d'Archimède tend à faire pivoter l'aile autour de son axe de rotation, le bord d'attaque s'orientant alors naturellement vers le bas, respectivement le haut, provoquant une incidence à piquer, respectivement à cabrer, sur l'aile, laquelle génère une force hydrodynamique qui tend à ramener cette aile vers ladite position angulaire de référence de l'engin correspondant à un roulis réduit, alors que l'engin se déplace.
- Selon un encore autre aspect de ce procédé, on propose de lier fonctionnellement, par des moyens de commande, ladite aile (et/ou donc ladite gouverne) libre à un lest lui-même libre de rotation autour d'un axe parallèle au plan contenant l'axe de roulis et l'axe de lacet, de telle façon que lorsque l'engin s'incline autour de l'axe de roulis, le déplacement angulaire relatif entre le lest et le corps de l'engin génère une action sur les moyens de commande qui entraîne en pivotement l'aile autour de son axe de rotation. Le sens du couplage entre le déplacement du lest et celui de l'aile est alors tel que l'incidence qu'elle prend génère un couple tendant à la ramener vers ladite position angulaire de référence de l'engin correspondant à un roulis réduit, l'engin étant bien entendu en déplacement.
- On peut ainsi envisager de monter un lest pivotant autour de l'axe de roulis, son mouvement venant actionner ladite aile, ou modifier la force, voire l'orientation de la poussée d'un propulseur, de façon à ramener l'engin proche de son roulis nul.
- On pourra appliquer ce principe de contrôle à une (ou plusieurs) aile montée libre de rotation sur son axe, disposée sous l'engin, et lestée devant son axe de telle façon que, lorsque l'engin s'incline sur son axe de roulis (l'aile basse monte), le couple créé par ce lest fait pivoter l'aile autour de son axe, le bord d'attaque s'orientant alors naturellement vers le bas, provoquant une incidence à piquer sur l'aile.
- Cet effet pourra également être obtenu en utilisant le couple de la poussée d'Archimède sur l'aile, le volume étant disposé principalement derrière l'axe de rotation.
- Le même résultat pourra encore être obtenu en plaçant l'aile libre en position verticale haute et en disposant le lest et/ou le volume à l'inverse de ce qui est décrit ci-dessus.
- S'il semble naturel de concevoir l'engin de telle sorte qu'à l'arrêt les forces de gravité et d'Archimède concourent à le maintenir en position verticale et à l'endroit, le dispositif n'exclut pas un engin qui ne trouverait sa position verticale et à l'endroit que de façon dynamique, c'est-à-dire lorsque l'engin avance vers l'avant, sa position à l'arrêt étant alors quelconque.
- Le principe de l'aile pilotée par un lest pourra également être utilisé pour générer des forces: l'aile libre étant par exemple placée en position basse, on peut munir l'engin d'une ou plusieurs autres ailes, motorisées (ou autres actionneurs), destinées à piloter l'engin et disposées dans le demi-espace opposé. Dans ce cas, il est possible de délibérément tenter de déstabiliser l'engin en provoquant un couple de roulis. Sous l'effet de cette prise de roulis, lorsque l'engin avance, la réaction de l'aile basse est de pivoter jusqu'à créer un couple s'opposant au couple des actionneurs, et donc une force selon l'axe latéral de l'engin. L'engin se stabilise alors dans une position proche de la verticale, avec une légère gîte, et l'aile fournit une force latérale à même de modifier la trajectoire de l'engin : bien que non commandée, et libre de rotation sur son axe, l'aile peut donc participer au pilotage de l'engin.
- Selon un tel aspect et pour généraliser, l'invention se rapporte donc aussi à la réalisation d'un engin sous-marin comprenant, comme connu en soi par exemple dans US-
2005-0268835-A1 (dont la description est incluse par référence), un corps où se situe l'axe de roulis de l'engin, et des moyens d'orientation mus par des actionneurs, pour piloter l'engin, mais avec ici comme particularité que le lest sera alors conçu, monté sur l'engin et situé par rapport à son aile et/ou sa gouverne « associée » de telle sorte que, l'engin avançant suivant son axe de déplacement, piloté par les actionneurs, le lest, sous l'effet d'une prise de roulis, fera pivoter l'aile (la gouverne) jusqu'à créer un couple s'opposant au couple des moyens d'orientation, et donc une force selon un axe transversal à l'axe de déplacement de l'engin. - Ceci est particulièrement intéressant pour le pilotage d'engins en mouvement dont on cherche à minimiser la consommation, et à rendre robuste la stabilité.
- Comme on l'a compris, un engin conforme à l'invention pourra, immergé et en déplacement, stabiliser la position d'un ou plusieurs objets remorqués, auxquels il sera lié pour cela, dans une application spécifique.
- D'autres caractéristiques et avantages de la présente invention apparaîtront encore dans la description qui suit, relative à différents modes de réalisation, dont un mode préféré. Dans les illustrations associées :
- la figure 1 est une vue en perspective avec arrachement d'un dispositif de contrôle conforme à l'invention, lorsque l'engin gite à tribord,
- les figures 2 et 3 sont deux vues en perspective du système de commande d'ailes soumises à des « actionneurs »,
- les figures 4 et 5 sont deux vues en perspective, avec arrachement, du système à « actionneurs »,
- la figure 6 montre de l'arrière de l'engin, en traction latérale à tribord,
- la figure 7 montre l'aile libre de la fig.6, suivant son axe, depuis le centre de l'engin,
- les figures 8,9 montrent l'inclinaison possible des axe de rotation et bord d'attaque d'aile, montrent de côté la ligne d'application des forces hydrodynamiques, localisent le centre de poussée hydrodynamique,
- la fig.10 montre une solution à une seule aile (libre),
- la fig.11, une solution à aile creuse pivotante et à gouverne arrière soumise à l'effet direct d'un lest,
- la fig.12, une solution à aile portant une gouverne arrière soumise à l'effet direct d'un lest,
- la fig.13 est un schéma de dessus de l'aile à gouverne de la fig.12,
- la fig.14 montre une solution à aile librement pivotante, à aileron arrière et soumise à l'effet indirect d'un lest,
- les figs.15,16 schématisent une vue en coupe selon XV-XV (par l'arrière), à gîte nulle (fig.15) et engin incliné (fig.16),
- et les figs.17,18,19 sont trois schémas de dessus de l'aile à gouverne de la fig.14, à gîte nulle (fig.17) et avec gîte (fig.18 puis 19).
- Figure 1, un engin 1 sous-marin immergeable conforme à l'invention est utilisé ici pour soutenir et positionner correctement un objet sous-marin remorqué, en particulier une antenne acoustique linéaire remorquée 3.
- L'engin 1 comprend un corps central creux 5, et plusieurs ailes se dressant autour de lui, ici au nombre de trois 7a, 7b, 7c,.
- Le corps 5 présente un axe longitudinal 5a correspondant à l'axe de roulis de l'engin.
- Ce corps comprend une partie centrale fixe 9 et une coque extérieure 11 concentrique entre lesquelles il existe une possible rotation relative, autour de l'axe 5a, de manière que les ailes puissent ainsi tourner autour de cet axe, avec la coque.
- Les ailes, qui s'étendent suivant un axe transversal (ici radial) à l'axe 5a, sont montées individuellement pivotantes autour d'un pivot s'étendant suivant leur axe transversal respectif de rotation, 13a, 13b, 13c.
- Pour cela, chaque aile est fixée vers son emplanture, telle que 17c pour l'aile 7c, à un arbre de pivot (arbre 15c s'étendant ici radialement, suivant l'axe 13c, pour l'aile 7c).
- Pour l'explication concernant les ailes, considérons l'aile 7b, le montage des autres ailes étant largement commun: l'arbre radial 15b traverse la coque extérieure 11 sous laquelle il est relié à une patte transversale 19 pourvue d'un téton ou ergot 21 qui coulisse dans la gorge périphérique 23 d'une bague 25 (figures 1 à 3).
- En décalage suivant l'axe 5a par rapport à la gorge, la bague 25 est traversée par deux trous diamétralement opposés 29 dans chacun desquels se déplace un doigt 31 (figures 2 et 3).
- Comme montré également figure 4 ou 5, le doigt 31 est un élément d'un dispositif radial à excentrique 33 mû par un renvoi d'angle 35 commandé par l'arbre de sortie 37 d'un moteur électrique 39.
- Pour l'aile 7c cette commande n'existe pas. Elle est donc « libre ».
- L'arbre 37 est commandé par un moto-réducteur qui entraîne en rotation une vis axiale 41 sur laquelle engrène la roue dentée à axe radial 43, définissant ainsi le renvoi d'angle 35 (figure 5).
- La roue dentée 43 est montée sur un arbre radial 45 qui l'entraîne en rotation.
- L'arbre 45 est muni d'un excentrique d'extrémité, figure 3.
- Le montage est identique pour l'aile 7a, avec la bague 49 (figure 4).
- Deux moteurs (voir figs.4,5:39,39') et deux dispositifs actionneurs 29, 29' , 31, 31' , 37, 43, 39, 39'... associés aux bagues circulaires 25, 49, entraînent les ailes 7a,7b.
- Les bagues tournantes 25, 49, et donc les ailes 7a, 7b, sont décalées coaxialement suivant l'axe 5a.
- Quant à l'aile libre 7c, son arbre radial 15c traverse la coque 11 en étant retenue axialement dedans, pour tourner par rapport à elle, et si nécessaire avec elle, autour de l'axe de roulis 5a. Autre solution : l'axe est fixe sur la coque et le pivot s'effectue dans l'aile.
- L'orientation angulaire, par rapport à cet axe, de chaque aile peut ainsi être adaptée, soit librement sous l'action de l'extérieur et du lest (aile 7c), soit de façon commandée par lesdits moyens motorisés (ailes 7a,7b) ici donc dénommés « actionneurs ». Des actionneurs autres pourraient être prévus (vérins...).
- Le lest 90 est monté sur l'engin et situé par rapport à l'aile 7c, de telle sorte que, l'engin avançant suivant l'axe de roulis 5a, une inclinaison en roulis de l'aile provoquera un couple tendant à faire pivoter cette aile autour de son axe 13c, son bord d'attaque 70c s'orientant naturellement pour provoquer une incidence sur l'aile qui va à la ramener vers ladite position angulaire de référence de l'engin correspondant donc à un roulis réduit.
- Dans l'exemple de la figure 1 et en avance dans l'eau, sans braquage imposé sur les ailes 7a, 7b ni roulis imposé notable, l'aile 7c sera située en position sensiblement verticale inférieure et les deux ailes 7a, 7b se placeront naturellement en position supérieure (au-dessus du corps).
- Si on souhaite alors un contrôle de la profondeur, on agira donc sur les actionneurs des deux ailes supérieures 7a,7b que l'on fera pivoter autour de leur axe de rotation, de sorte que l'engin 1 appliquera une force résultante verticale par exemple sur les tronçons amont et aval 3a, 3b de l'objet remorqué auquel on aura pu le relier (on suppose bien entendu que l'ensemble avancera).
- Pour un contrôle latéral (plan horizontal), les deux mêmes ailes supérieures 7a, 7b seront commandées pour pivoter dans le même sens.
- Le contrôle de la profondeur sera de préférence un contrôle local utilisant un signal de pression, comme décrit dans
US-2005-0268835-A1 . - Pour une liaison avec les tronçons d'objets tractés (liaison mécanique, électrique, circulation de signaux ...), la partie centrale fixe 9 du corps 5 est munie de premier et second embouts 53, 55 de raccordement.
- Figs 1,8-10, l'aile libre 7c est située sous le corps et le lest 90,900, porté ici par cette aile, est situé en avant du pivot 13c (voir extrémité avant notée AVT).
- Ainsi, lorsque l'engin prend du roulis, l'aile basse 7c tend à monter et la masse de son lest tend à la faire piquer. L'aile prend une incidence négative produisant un effort qui fait descendre, réduisant ainsi le roulis.
- Fig.6, l'aile libre lestée 7c est toujours représentée en bas, et la prise de roulis à tribord est due à la poussée des ailes hautes 7b,7c, que l'aile basse ne compense que lorsque l'inclinaison est suffisante, comme expliqué ci-dessous.
- Fig.7, le lest 90 impose à l'aile de plonger dès qu'elle est suffisamment écartée de sa position angulaire de référence correspondant à un « roulis nul », ce qui redresse l'engin.
- Comme illustré figs.8,9, le centre de poussée hydrodynamique CPD, matérialisé en 117, est de préférence situé derrière l'axe de pivot 13c, pour cette aile 7c (voir côtés avant AVT et arrière ARR). Ainsi, on assurera de manière naturelle la stabilité globale de l'engin 1.
- A l'équilibre, la force hydrodynamique est telle qu'elle produit un couple de roulis opposé au couple créé par les autres ailes, ici 7a,7b. Cette force crée également un couple de rotation sur l'aile. Le poids est quant à lui situé devant l'axe 13c et produit un couple de rotation de l'aile sur son axe, qui, à l'équilibre, s'oppose à celui de la force hydrodynamique.
- La fig.8 montre la ligne 111 d'application des forces hydrodynamiques (ligne de poussée) et localise en 113 le centre de poussée hydrodynamique (statique, CPS). Le centre de poussée est situé sur cette droite, à une position telle que les surfaces côté emplanture et côté extrémité libre de l'aile sont sensiblement égales. L'équilibre est atteint lorsque le couple du poids égale sensiblement celui de la force hydrodynamique, autour de l'axe de l'aile. L'engin s'incline donc jusqu'à ce que toutes ces forces s'équilibrent.
- Le choix de placer ici le lest en base d'aile, près du corps 5 (figs.1,8,10 notamment) a été en particulier guidé par deux considérations :
- la recherche d'un bras de levier maximum pour le lest,
- favoriser un bord d'attaque 70c incliné vers l'arrière par rapport à la verticale (voir angle A figs.8,9), pour limiter l'accrochage d'algues où de lignes.
- Fig.8, l'axe de rotation 13c est supposé vertical ou du moins perpendiculaire à l'axe de roulis 5a.
- Comme montré figs.9,10, on pourra préférer incliner cet axe 13c vers l'arrière de sorte que, derrière leur point d'intersection, les deux axes 5a-13c forment entre eux un angle β' aigu ; β si l'on considère la perpendiculaire à l'axe 5a, voir fig.9.
- Cette inclinaison de l'axe 13c d'un angle différent de 90° pourra permettre que l'angle d'équilibre de l'aile au repos soit proportionnel à la gîte de l'engin et/ou que l'amortissement par effet dynamique soit encore plus efficace.
- Incliner l'axe 13c vers l'arrière et redresser le bord d'attaque 70c de l'aile, peut favoriser l'amortissement des oscillations lorsque l'engin produit des efforts latéraux.
- Un bord d'attaque 70c moins incliné par rapport à la verticale que ne l'est l'axe de rotation de l'aile (soit A<β, ou A'>β' si l'on regarde par rapport à l'axe 5a) doit être favorable, dans cette situation.
- Environ 15 à 25° d'inclinaison d'aile et des axes d'ailes inclinés entre 15 et 35° sont envisageables.
- Une telle inclinaison de l'axe de rotation de l'aile libre peut inciter à placer le lest en bout d'aile, plus près de son extrémité libre 700c, comme fig.9 où le lest est schématisé 900 et se situe juste derrière son bord d'attaque. On profite de l'effet de quille du lest qui produit un couple naturel stabilisant, ce qui peut assurer à l'engin une position verticale même à l'arrêt.
- L'aile libre peut être favorablement réalisée en matériau composite incorporant une mousse. Ainsi, outre la masse qui exerce un couple à piquer sur l'aile, la flottabilité de la mousse produit le même effet par poussée d'Archimède.
- Les figures 10 à 19 montrent d'autres réalisations possibles, notamment en liaison avec le fait que ce qui précède est applicable à une solution à gouverne seule et/ou à aile pourvue d'une gouverne.
- Ainsi, fig.10, l'engin ne comprend qu'une aile 7c1 lestée à l'avant, par exemple en 90', et montée libre autour de son axe 13'c de pivotement par rapport au corps central 5' de l'engin (axe de roulis 5'a). Elle peut inclure tout ou partie des considérations qui précèdent. Le corps 5' de l'engin 10 peut être monobloc.
- Figure 11, le lest 910 est monté sur l'aile 7c2, laquelle pivote librement autour de son axe de rotation 13c2 qui intersecte l'axe de roulis 5a qui peut être celui du corps de l'engin concerné, ici non figuré.
- Sur l'aile, qui peut être creuse, le lest 910 est monté libre de rotation autour d'un axe 910a passant par les bords d'attaque 911 et de fuite 913 de l'aile.
- Le lest 910 est ici placé vers l'emplanture de l'aile, laquelle porte un arbre de pivot d'axe 13c2. Le lest pourrait être plus près de l'extrémité libre de l'aile, ou placé à l'extérieur, par exemple au-delà du bout d'aile.
- A l'arrière (ARR), l'aile porte la gouverne 915 qui est ici montée pivotante autour d'un axe 915a parallèle à l'axe 13c2, le long du bord de fuite 913.
- Si l'aile 7c2 était fixe, montée rigidement sur le corps de l'engin, la gouverne pivotante 915 serait avantageusement placée plus près de l'extrémité libre 700c.
- Le lest 920 et la gouverne 915 sont fonctionnellement liés entre eux par une commande 917, tel qu'un câble flexible ou une tringlerie, de manière que le pivotement du lest autour de son axe 910a, suite à une prise de roulis, agisse sur la gouverne 915, voire sur l'aile si elle est elle-même montée pivotante, pour ramener l'engin vers sa position angulaire de référence en roulis et/ou pour participer à son orientation, lorsque celui-ci avance (AVT) sensiblement parallèlement à l'axe 5a, à un angle possible de dérapage près.
- Figure 12, le lest 920 a un effet direct sur une gouverne 921 montée pivotante sur et par rapport à une aile 7c3 montée sur un corps d'engin 50 à axe de roulis 5a.
- L'aile 7c3 peut être montée fixe sur le corps 50.
- Elle peut également être montée suivant l'axe 13c2, sous la commande de moyens d'actionnement, tels les actionneurs précités de l'aile 7a ou 7b. On aura alors une aile 7c3 motorisée à gouverne ou aileron 921 asservi en roulis par le lest 920 lié fonctionnellement à cette gouverne par la commande 923.
- La commande 923 peut être l'une de celles précitées.
- Le lest 920 est à l'intérieur du corps 50, pour pivoter librement suivant un secteur angulaire, autour de l'axe 920a parallèle au plan 925 contenant l'axe 5a et l'axe de lacet 5c, cette caractéristique pouvant s'appliquer au cas des figures 11 ou 14.
- Figure 13, où l'on suppose l'aile 7c3 immobile, si une gîte à bâbord intervient, alors que l'engin 100 avance, une rotation de l'aileron 921 se produit, sous l'effet du lest 920, créant une portance et conduisant à une limitation du roulis.
- Les figures 14 et suivantes montrant une solution à effet indirect où une gîte autour l'axe de roulis provoque une rotation de gouverne induisant une rotation, par variation d'incidence, de l'aile porteuse de cette gouverne et une diminution de la gîte.
- Figure 14, le lest 930 est placé dans le corps 51 de l'engin 110.
- Le lest 930, qui pourrait être à l'extérieur du corps (de même pour la solution fig.12), pivote autour d'un axe 930a parallèle à 5a.
- En cas de roulis, une commande du type précité, 931, transmet l'effet du lest sur la gouverne arrière 933. Cette gouverne est pivotante par rapport et derrière l'aile 7c4 laquelle est libre de rotation sur et par rapport au corps 51, autour de l'axe 13c2 qui intersecte l'axe de roulis 5a et passe par ses bords d'emplanture et d'extrémité libre.
- L'axe 933a de la gouverne 933 intersecte également l'axe 5a, mais n'est pas nécessairement parallèle à l'axe 13c2.
- L'arbre de pivotement de la gouverne suivant l'axe 933a est porté par des tiges 935a, 935b fixées à l'aile et s'étendant derrière son bord de fuite 937.
- L'aile 7c4 est ici supposée librement en rotation autour de son axe 13c2, sans être même soumise à l'effet direct d'aucun lest.
- Figures 15 et 16, la commande 931 peut comprendre un câble, ou par exemple une tige souple, 939 coulissant dans une gaine 941 et reliant d'un côté la gouverne 933 (fig.14) et, de l'autre, par l'intermédiaire d'un pivot ou d'une rotule 943, le lest 930 qui est donc monté pivotant autour de son axe.
- Supposons, comme illustré figure 15, que l'équilibre général de l'engin 110 est tel que, s'il avance sensiblement suivant l'axe de roulis 5a de la figure 14, il se place naturellement avec l'aile libre 7c4 verticale et dirigée vers le bas, hors force directionnelle exercée.
- La figure 16 montre ce qui se produit si l'engin gîte et que, par conséquent, l'axe 13c2 de l'aile 7c4 s'incline par rapport à la verticale : lorsque l'engin gîte à bâbord, le câble 939 est tiré. Il est par contre poussé si l'engin gîte à tribord, avec les effets induits précités.
- Figure 17, l'engin avance dans sa position de la figure 15. Le câble 939 et l'aile 7c4 sont en position neutre. En l'absence de dérapage, l'aile et la gouverne arrière 933 peuvent être orientées suivant l'axe 5a de roulis.
- Figure 19, en cas de gîte à bâbord, le lest entraîne la gouverne 933 en rotation, du fait de la force générée par le roulis. Ceci provoque une rotation de l'aile 7c4. La force F principale générée redresse alors l'engin.
- On se rappellera enfin que l'orientation des ailes, fixes ou pivotantes, 7c, 7c1...7c4 ne sera pas nécessairement vers le bas lorsque l'engin concerné avance, leur position angulaire au repos pouvant être théoriquement quelconque, de même que le nombre d'ailes et/ou de gouvernes sur l'engin.
- Comme évoqué avant, un engin sous-marin équipé d'un propulseur, tel qu'un moteur d'entraînement d'au moins une hélice, pourrait voir son orientation contrôlée, au moins partiellement, par l'un des systèmes à lest ici présentés.
Claims (16)
- Procédé pour contrôler la navigation en immersion d'un engin sous-marin en déplacement dans une direction,
caractérisé en ce que :- on monte au moins une aile (7c,7c2,7c4..) et/ou une gouverne (915,933) libre de rotation autour d'un axe (13c,915a,933a) transversal à un axe (5a) de roulis de l'engin suivant lequel on le fait avancer sensiblement dans ladite direction, l'engin présentant, par rapport à son axe de roulis, une position angulaire de référence correspondant à un roulis sensiblement nul,- on leste cette aile (7c, 7c2, 7c4..) et/ou cette gouverne (915,933) devant, respectivement derrière, son axe de rotation, et/ou on utilise le couple de la poussée d'Archimède sur cette aile ou cette gouverne, en situant l'essentiel de son volume derrière, respectivement devant, l'axe de rotation par rapport à la direction d'avance, de telle façon que lorsque l'engin s'incline autour de l'axe (5a) de roulis, le couple créé par le lest et/ou ladite poussée d'Archimède tend à faire pivoter l'aile et/ou la gouverne autour de son axe (13c,915a,933a) de rotation, le bord d'attaque s'orientant alors naturellement vers le bas, respectivement le haut, provoquant une incidence à piquer, respectivement à cabrer qui tend à ramener cette aile et/ou cette gouverne vers ladite position angulaire de référence de l'engin. - Procédé pour contrôler la navigation en immersion d'un engin sous-marin en déplacement dans une direction et présentant, par rapport à son axe de roulis, une position angulaire de référence correspondant à un roulis sensiblement nul, caractérisé en ce que :- on monte au moins une aile (7c,7c2,7c4..) et/ou une gouverne (915,933) libre de rotation autour d'un axe transversal à un axe de roulis de l'engin suivant lequel on le fait avancer dans ladite direction,- on lie fonctionnellement, par des moyens de commande, cette aile et/ou cette gouverne à un lest (90,900,910,920,930) libre de rotation autour d'un axe parallèle au plan contenant l'axe (5a) de roulis et l'axe de lacet, de telle façon que lorsque l'engin s'incline autour de l'axe de roulis, le déplacement angulaire relatif entre le lest et le corps de l'engin génère une action sur les moyens de commande qui entraîne en pivotement l'aile (7c,7c2,7c4..) ou la gouverne (915,933) autour de son axe de rotation (13c,915a,933a), le sens du couplage entre le déplacement du lest et celui de l'aile ou de la gouverne étant tel que l'incidence ainsi prise par l'aile ou la gouverne génère un couple tendant à la ramener vers ladite position angulaire de référence de l'engin.
- Procédé selon la revendication 1 ou 2, caractérisé en ce que le lest est situé soit (920,930) à l'écart de l'aile ou de la gouverne, soit (910) monté pivotant sur l'aile autour d'un axe passant sensiblement par les bords d'attaque et de fuite de l'aile ou de la gouverne.
- Procédé selon l'une des revendication précédentes,
caractérisé en ce que :- on place le lest (90,90',900,910) sur l'aile(7c,7c2,),- on relie cette aile, de façon libre en pivotement autour dudit axe de rotation (13c), à un corps (5) dont on pourvoit l'engin,- on équipe ledit corps de plusieurs autres ailes (7a,7b) montées chacune pivotantes par rapport au corps, autour d'un axe de rotation transversal audit axe (5c) de roulis, sous l'action de moyens d'entraînement commandés par un actionneur (19,31,39...), et,- l'engin étant entraîné en déplacement, immergé, on le stablise sensiblement en roulis par l'intermédiaire de ladite aile lestée (7c) et/ou on fait participer cette aile à son pilotage, l'aile s'orientant naturellement, consécutivement à la gîte induite par le couple de rotation en roulis généré par les autres ailes sous l'action desdits actionneurs. - Engin sous-marin comprenant :- un corps (5,50,51) présentant une direction de déplacement coïncidant sensiblement avec l'axe (5c) de roulis de l'engin et présentant, par rapport à cet axe de roulis, une position angulaire de référence correspondant à un roulis sensiblement nul,- au moins une aile (7c,7c2,7c4..) montée pivotante par rapport au corps autour d'un axe transversal à l'axe de roulis,caractérisé en ce qu'il comprend un lest auquel l'aile (7c,7c2,7c4..) est liée au moins fonctionnellement et qui est conçu, monté sur l'engin et situé par rapport à cette aile de telle sorte que, l'engin avançant suivant son axe de déplacement, une inclinaison en roulis de l'engin provoque un couple créé par le lest et qui tend à faire pivoter l'aile autour de son axe, le bord d'attaque s'orientant alors naturellement pour provoquer une incidence sur l'aile tendant à ramener l'engin vers ladite position angulaire de référence de l'engin.
- Engin sous-marin comprenant :- un corps (5,50,51) présentant une direction de déplacement coïncidant sensiblement avec l'axe (5c) de roulis de l'engin et présentant, par rapport à cet axe de roulis, une position angulaire de référence correspondant à un roulis sensiblement nul,- au moins une aile (7c,7c2,7c4..) montée pivotante par rapport au corps autour d'un axe transversal à l'axe de roulis,caractérisé en ce que :- cette aile est pourvue d'une gouverne (915,933) montée pivotante par rapport à elle autour d'un axe transversal à l'axe de roulis,- et l'engin comprend un lest auquel l'aile (7c,7c2,7c4..) ou la gouverne (915,933) est liée au moins fonctionnellement et qui est conçu, monté sur l'engin et situé de telle sorte que, l'engin avançant suivant son axe de déplacement, une inclinaison en roulis de l'engin provoque un couple créé par le lest et qui tend à faire pivoter l'aile et/ou la gouverne autour de son axe, le bord d'attaque s'orientant alors naturellement pour provoquer une incidence sur l'aile et/ou la gouverne tendant à ramener l'engin vers ladite position angulaire de référence.
- Engin sous-marin comprenant :- un corps (5,50,51) présentant une direction de déplacement coïncidant sensiblement avec l'axe (5c) de roulis de l'engin et présentant, par rapport à cet axe de roulis, une position angulaire de référence correspondant à un roulis sensiblement nul,- au moins une aile (7c2,7c3..) montée sur le corps,caractérisé en ce que :- cette aile est montée fixe par rapport au corps et pourvue d'une gouverne (915,933) montée pivotante par rapport à elle autour d'un axe transversal à l'axe de roulis,- et l'engin comprend un lest auquel l'aile (7c2,7c3..) ou la gouverne (915,933) est liée au moins fonctionnellement et qui est conçu, monté sur l'engin et situé de telle sorte que, l'engin avançant suivant son axe de déplacement, une inclinaison en roulis de l'engin provoque un couple créé par le lest et qui tend à faire pivoter l'aile et/ou la gouverne autour de son axe, le bord d'attaque s'orientant alors naturellement pour provoquer une incidence sur l'aile et/ou la gouverne tendant à ramener l'engin vers ladite position angulaire de référence.
- Engin sous-marin comprenant :- un corps présentant une direction de déplacement coïncidant sensiblement avec l'axe de roulis,- des moyens d'orientation (7a,7b..) mus par des actionneurs (39,39'), pour piloter l'engin,caractérisé en ce qu'il comprend en outre :- au moins une aile (7c,7c1,7c2,7c3,7c4..) montée pivotante par rapport au corps autour d'un axe transversal à l'axe de roulis,- un lest (9,90,910) auquel l'aile est liée au moins fonctionnellement et qui est conçu, monté sur l'engin et situé par rapport à cette aile de telle sorte que, l'engin avançant suivant son axe de déplacement, piloté par les actionneurs, le lest, sous l'effet d'une prise de roulis, fait pivoter l'aile jusqu'à créer une force selon un axe transversal à l'axe de déplacement, l'engin se stabilisant alors dans une position proche de la position verticale, l'aile fournissant une force latérale à même de modifier la trajectoire de l'engin.
- Engin sous-marin comprenant :- un corps présentant une direction de déplacement coïncidant sensiblement avec l'axe de roulis de l'engin,- des moyens d'orientation (7a,7b..) mus par des actionneurs (39,39'), pour piloter l'engin,caractérisé en ce qu'il comprend en outre :- au moins une aile (7c,7c1,7c2,7c3,7c4..) montée pivotante par rapport au corps autour d'un axe transversal à l'axe de roulis et pourvue d'une gouverne (915,933) montée pivotante par rapport à elle autour d'un axe transversal à l'axe de roulis,- un lest (9,90,910) auquel l'aile et/ou la gouverne est liée au moins fonctionnellement et qui est conçu, monté sur l'engin et situé de telle sorte que, l'engin avançant suivant son axe de déplacement, piloté par les actionneurs, le lest, sous l'effet d'une prise de roulis, fait pivoter l'aile et/ou la gouverne jusqu'à créer une force selon un axe transversal à l'axe de déplacement, l'engin se stabilisant alors dans une position proche de la position verticale, l'aile et/ou la gouverne fournissant une force latérale à même de modifier la trajectoire de l'engin.
- Engin sous-marin comprenant :- un corps présentant une direction de déplacement coïncidant sensiblement avec l'axe de roulis de l'engin,- des moyens d'orientation (7a,7b..) mus par des actionneurs (39,39'), pour piloter l'engin,caractérisé en ce qu'il comprend en outre :- au moins une aile (7c2,7c3..) montée fixe par rapport au corps et qui est pourvue d'une gouverne (915,933) montée pivotante par rapport à elle autour d'un axe transversal à l'axe de roulis,- un lest (9,90,910) auquel l'aile et/ou la gouverne est liée au moins fonctionnellement et qui est conçu, monté sur l'engin et situé de telle sorte que, l'engin avançant suivant son axe de déplacement, piloté par les actionneurs, le lest, sous l'effet d'une prise de roulis, fait pivoter l'aile et/ou la gouverne jusqu'à créer une force selon un axe transversal à l'axe de déplacement, l'engin se stabilisant alors dans une position proche de la position verticale, l'aile et/ou la gouverne fournissant une force latérale à même de modifier la trajectoire de l'engin.
- Engin selon l'une des revendications 5 à 10,
caractérisé en ce que, pour piloter l'engin et/ou tendre vers une stabilisation en roulis:- ladite aile (7c,7c2,7c4..) liée au lest est montée libre de rotation par rapport au corps, et,- les moyens d'orientation comprennent plusieurs autres ailes (7a,7b) mues par lesdits actionneurs et montées pivotantes par rapport au corps chacune autour d'un axe transversal à l'axe de roulis. - Engin selon l'une quelconque des revendications 5 à 11, caractérisé en ce que l'axe de pivotement (13c,13c2) de l'aile ou de la gouverne liée fonctionnellement au lest est incliné d'un angle différent de 90° par rapport à l'axe de roulis (5a) du corps (5,51...) et/ou est incliné vers l'avant en direction de cet axe de roulis.
- Engin selon la revendication 12, caractérisé en ce que :- le lest (90,900) est disposé sur l'aile et décalé vers l'avant ou l'arrière par rapport à l'axe de pivotement (13c) de celle-ci, et,- le bord d'attaque (70c) de cette aile (7c,7c1) est plus incliné (angle A') par rapport à l'axe de roulis (5a) que ne l'est (angle β') l'axe de pivotement (13c,15c) de ladite aile.
- Engin selon l'une quelconque des revendications 5 à 12, caractérisé en ce que le lest (90,900) est disposé sur l'aile et décalé vers l'avant ou l'arrière par rapport à l'axe de pivotement (13c) de celle-ci et cette aile (7c,7c1) incorpore une mousse dont la flottabilité amplifie, par la poussée d'Archimède, l'action exercée sur elle par le lest (90,90',900).
- Utilisation d'au moins une aile ou une gouverne sur un engin sous-marin comprenant un corps et présentant une direction de déplacement coïncidant sensiblement avec l'axe de roulis, l'aile ou la gouverne étant montée pivotante transversalement à cet axe de déplacement,
caractérisée en ce qu'on utilise cette aile ou cette gouverne en la faisant mouvoir par un lest (90,90',900,910,920,930) dont on se sert à la fois comme capteur d'inclinaison en roulis et comme source mécanique d'asservissement en roulis. - Dispositif sous-marin remorqué, caractérisé en qu'il comprend l'engin selon l'une quelconque des revendications 5 à 14 auquel est lié un objet remorqué (3a,3b) dont ledit engin peut stabiliser la position, immergé et en déplacement.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0606453A FR2903655B1 (fr) | 2006-07-13 | 2006-07-13 | Dispositif de stabilisation dynamique d'un engin sous-marin. |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1897799A2 true EP1897799A2 (fr) | 2008-03-12 |
| EP1897799A3 EP1897799A3 (fr) | 2008-03-26 |
| EP1897799B1 EP1897799B1 (fr) | 2010-03-24 |
Family
ID=37745157
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07290867A Active EP1897799B1 (fr) | 2006-07-13 | 2007-07-10 | Dispositif de stabilisation dynamique d'un engin sous-marin |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7610871B2 (fr) |
| EP (1) | EP1897799B1 (fr) |
| CN (1) | CN101104438B (fr) |
| AT (1) | ATE461860T1 (fr) |
| DE (1) | DE602007005427D1 (fr) |
| FR (1) | FR2903655B1 (fr) |
| NO (1) | NO338013B1 (fr) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2917063B1 (fr) | 2007-06-07 | 2009-12-04 | Cybernetix | Dispositif de fermeture d'un fuselage lie a un objet sous-marin remorque et engin ainsi equipe |
| GB0914314D0 (en) * | 2009-08-14 | 2009-09-30 | Ultra Electronics Ltd | Towable buoy |
| US9587645B2 (en) * | 2010-09-30 | 2017-03-07 | Pratt & Whitney Canada Corp. | Airfoil blade |
| US9254509B2 (en) | 2012-04-05 | 2016-02-09 | Cggveritas Services Sa | Active cleaning device for seismic streamers and related methods |
| FR3001302B1 (fr) | 2013-01-24 | 2016-01-22 | Cggveritas Services Sa | . |
| FR3003040B1 (fr) | 2013-03-05 | 2016-07-01 | Cggveritas Services Sa | Aile pliable pour un dispositif et procede de pilotage de flute |
| US9487282B2 (en) | 2014-04-08 | 2016-11-08 | Mrv Systems, Llc | Underwater vehicles configured to perform vertical profiling and diagonal profiling, and corresponding methods of operation |
| DK178119B1 (en) * | 2014-06-11 | 2015-06-01 | Seismisk Iq Bird Aps | SEISMIC EQUIPMENT POSITIONING APPLIANCES TOWED BY AN INQUIRY VESSEL |
| US9381987B1 (en) | 2015-10-01 | 2016-07-05 | Mrv Systems, Llc | Air-based-deployment-compatible underwater vehicle configured to perform vertical profiling and, during information transmission, perform motion stabilization at a water surface, and associated methods |
| CN105292416B (zh) * | 2015-11-05 | 2017-04-26 | 江苏科技大学 | 一种主动平衡耐压装备及其控制方法 |
| CN105460187B (zh) * | 2015-11-30 | 2017-12-08 | 天津大学 | 一种水下滑翔机变翼机构 |
| CN105539787B (zh) * | 2015-12-04 | 2017-09-29 | 天津大学 | 一种新型水下滑翔机翼型调整装置 |
| CN106275337B (zh) * | 2016-08-24 | 2018-01-19 | 合肥凌翔信息科技有限公司 | 一种可进行海底探测的仿生鱼 |
| US10718878B2 (en) | 2018-01-08 | 2020-07-21 | Cgg Services Sas | Method and system for hydrostatic balance control, based on pressure modelling, of a marine seismic vibrator |
| US20240166312A1 (en) * | 2022-11-23 | 2024-05-23 | Rabih Masri | Vehicle operable as an underwater glider and a surface sailing vehicle and a method thereof |
| FR3149095A1 (fr) | 2023-05-23 | 2024-11-29 | Sercel | Appareil de positionnement et système d’acquisition sismique correspondant |
| CN120080979B (zh) * | 2025-02-26 | 2025-11-28 | 中国船舶科学研究中心 | 专用于应急上浮的被动抗横倾装置及工作流程 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2979010A (en) * | 1955-06-20 | 1961-04-11 | Sperry Rand Corp | Ship stabilization system |
| CA892351A (en) * | 1970-08-21 | 1972-02-08 | Dessureault Jean-Guy | Gravity controlled stabilizer |
| US3687100A (en) * | 1970-10-08 | 1972-08-29 | Everett P Larsh | Marine vessel roll stabilizer apparatus |
| US3934534A (en) * | 1972-07-19 | 1976-01-27 | Larsh Everett P | Marine vessel roll stabilizer apparatus |
| US3978813A (en) * | 1976-01-09 | 1976-09-07 | The United States Of America As Represented By The Secretary Of The Navy | Propeller-driven hydrophone array tensioning device |
| US4273063A (en) * | 1978-06-19 | 1981-06-16 | Societe Nouvelle Des Ateliers Et Chantiers Du Havre | Ship stabilizer |
| JPS6274793A (ja) * | 1985-09-27 | 1987-04-06 | Hitachi Zosen Corp | 潜水式重金属回収装置 |
| US4686922A (en) * | 1986-06-27 | 1987-08-18 | Burroughs Ralph B | Swing wing keel |
| FR2744870B1 (fr) * | 1996-02-13 | 1998-03-06 | Thomson Csf | Procede pour controler la navigation d'une antenne acoustique lineaire remorquee, et dispositifs pour la mise en oeuvre d'un tel procede |
| DE19719306C2 (de) * | 1997-05-07 | 2000-05-18 | Stn Atlas Elektronik Gmbh | Schleppkörper |
| US6011752A (en) * | 1998-08-03 | 2000-01-04 | Western Atlas International, Inc. | Seismic streamer position control module |
| US6305309B1 (en) * | 2000-04-24 | 2001-10-23 | The United States Of America As Represented By The Secretary Of The Navy | Attitude and roll stabilizer for towed undersea devices |
| FR2870509B1 (fr) * | 2004-05-18 | 2007-08-17 | Cybernetix Sa | Dispositif de controle de la navigation d'un objet sous-marin remorque |
-
2006
- 2006-07-13 FR FR0606453A patent/FR2903655B1/fr not_active Expired - Fee Related
-
2007
- 2007-07-10 DE DE602007005427T patent/DE602007005427D1/de active Active
- 2007-07-10 EP EP07290867A patent/EP1897799B1/fr active Active
- 2007-07-10 AT AT07290867T patent/ATE461860T1/de not_active IP Right Cessation
- 2007-07-11 CN CN200710130621.1A patent/CN101104438B/zh not_active Expired - Fee Related
- 2007-07-11 NO NO20073587A patent/NO338013B1/no unknown
- 2007-07-12 US US11/776,855 patent/US7610871B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE602007005427D1 (de) | 2010-05-06 |
| EP1897799B1 (fr) | 2010-03-24 |
| FR2903655A1 (fr) | 2008-01-18 |
| CN101104438B (zh) | 2013-05-29 |
| US7610871B2 (en) | 2009-11-03 |
| NO338013B1 (no) | 2016-07-18 |
| ATE461860T1 (de) | 2010-04-15 |
| US20080017094A1 (en) | 2008-01-24 |
| EP1897799A3 (fr) | 2008-03-26 |
| FR2903655B1 (fr) | 2009-04-17 |
| CN101104438A (zh) | 2008-01-16 |
| NO20073587L (no) | 2008-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1897799B1 (fr) | Dispositif de stabilisation dynamique d'un engin sous-marin | |
| WO2005054049A2 (fr) | Stabilisateur dynamique pour bateau, dispositif compensateur d’effort pour orienter une voilure et bateau semi-submersible | |
| EP0385827A1 (fr) | Dispositif de propulsion pour véhicule sous-marin | |
| EP3168126B1 (fr) | Aile portante en forme de t inversé adaptée pour être installée sur un bateau | |
| EP3212498B1 (fr) | Perfectionnements aux machines tournantes à rotor fluidique à pales orientables | |
| EP0694008B1 (fr) | Hydroptere a voile | |
| FR2887224A1 (fr) | Engin multimilieux | |
| WO2018229356A1 (fr) | Navire a plans porteurs a haute stabilite | |
| EP4363306B1 (fr) | Dispositif de mise à la verticale pour véhicule sous-marin | |
| WO2017109148A1 (fr) | Procede de pilotage d'un propulseur d'un vehicule marin | |
| WO2018229355A1 (fr) | Navire a plans porteurs a haute stabilite | |
| EP0708017A1 (fr) | Helice semi-immergee pour bateau | |
| WO2018229351A1 (fr) | Navire à plans porteurs à haute stabilité | |
| FR2529854A1 (fr) | Dispositif de stabilisation et de sustentation d'un navire | |
| CA2359374C (fr) | Aerodyne a decollage et atterrissage verticaux | |
| FR2932772A1 (fr) | Embarcation multicoques rotatives. | |
| WO2018127631A1 (fr) | Mécanisme d'actionnement et de réglage quatre degrés de liberté d'un foil de bateau | |
| WO2018229354A1 (fr) | Navire a plans porteurs a haute stabilite | |
| FR3125014A1 (fr) | Dispositif de direction a pivot vertical et appareil de propulsion de bateau comprenant celui-ci | |
| EP4440921A1 (fr) | Système de nageoires articulées pour bateau | |
| WO2025125765A1 (fr) | Dispositif de propulsion nautique et navire équipé du dispositif de propulsion | |
| FR2993238A1 (fr) | Structure navigante a traction par aile et montee sur foils | |
| WO1995013960A1 (fr) | Systeme de propulsion a voile pour embarcation | |
| HK1111389A (en) | Dynamic stabilisation device for a submarine vehicle | |
| WO2018229420A1 (fr) | Navire a plans porteurs a haute stabilite |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| 17P | Request for examination filed |
Effective date: 20080926 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| 17Q | First examination report despatched |
Effective date: 20081107 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 602007005427 Country of ref document: DE Date of ref document: 20100506 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20100324 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100625 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100705 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100724 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100624 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| BERE | Be: lapsed |
Owner name: SERCEL Effective date: 20100731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100726 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100731 |
|
| 26N | No opposition filed |
Effective date: 20101228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100710 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100324 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20190719 Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602007005427 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210202 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20230719 Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230725 Year of fee payment: 17 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20240801 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240801 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240731 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250722 Year of fee payment: 19 |