EP2991925B1 - Steuerschalter für eine bedienung einer maschine, insbesondere eine drahtlose, tragbare und handbetätigbare fernbedienung für einen kran - Google Patents
Steuerschalter für eine bedienung einer maschine, insbesondere eine drahtlose, tragbare und handbetätigbare fernbedienung für einen kran Download PDFInfo
- Publication number
- EP2991925B1 EP2991925B1 EP14771886.0A EP14771886A EP2991925B1 EP 2991925 B1 EP2991925 B1 EP 2991925B1 EP 14771886 A EP14771886 A EP 14771886A EP 2991925 B1 EP2991925 B1 EP 2991925B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- sensor
- control switch
- operator
- housing
- sensors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/40—Applications of devices for transmitting control pulses; Applications of remote control devices
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C17/00—Arrangements for transmitting signals characterised by the use of a wireless electrical link
- G08C17/02—Arrangements for transmitting signals characterised by the use of a wireless electrical link using a radio link
Definitions
- the invention relates to a control switch for operating a machine, in particular a wireless, portable and manually operable remote control for a crane, with a detection device, via which an operator can be detected, and with a safety circuit, via which the control switch is activated upon detection of an operator and is disabled when not detecting an operator.
- the German patent application DE 10 2009 051 819 A1 discloses a suspension switch for a crane whose controls are activated and deactivated via a safety circuit.
- the security circuit comprises an RFID reader which is arranged in the hanging switch, and an RFID transponder which is carried in the form of a bracelet by an operator authorized to operate the crane.
- the RFID reader has a signal strength with a short range in the range of about 20 cm to 30 cm.
- the safety circuit ensures that the controls of the pendant switch are activated only as long and thus the crane is only as long as operable as an authorized operator is in sufficient proximity to the control switch, ie the RIFD transponder in the reception area of the RFID reader , As soon as the operator or their RFID transponder moves too far out of the reception area of the RFID reader, the safety circuit deactivates the operating elements of the pendant switch.
- a wireless control switch for a crane which has a micro-joystick and a tilt sensor as controls.
- a so-called deadman button is arranged, which must be pressed with the thumb, in order to be able to work with the micro joystick. This is intended to prevent unintentional triggering of crane functions.
- the tilt sensor in the control switch is activated by a release button on the underside of the control switch pressed by a forefinger. As soon as the release button is released, the tilt sensor is deactivated.
- the inclination sensor can be used to initiate lifting or lowering movements as well as traveling movements of a crane trolley.
- a deadman circuit for a circular saw known.
- the circular saw has a trolley which can be moved by means of a feed drive.
- the feed drive can be controlled via a rotary handle.
- the dead man's circuit is provided in the form of a capacitive, inductive, mechanical and / or electrical sensor in the region of the rotary handle. This ensures that when a touch of the rotary handle by an operator, the presence of the operator is detected, which triggers a release of the feed drive by the dead man's circuit.
- the invention has for its object to provide a control switch for operation of a crane, in particular a wireless, portable and hand-operated remote control, which provides an improved safety circuit for activating and deactivating the control switch.
- a control switch for operating a crane in particular a wireless, portable and hand-operated remote control, with a detection device, via which an operator is detectable, and with a gripping area for an operator having housing and with a safety circuit, via which the control switch can be activated upon detection of an operator and can be deactivated when not detecting an operator
- the detection device comprises at least one sensor which detects a hand holding the control switch in the gripping area of the operator in a near field
- the detection device at least one other Includes sensor that detects a use of the control switch.
- the at least two sensors together with the safety circuit take over the deadman function and continuously detect the presence of the operator's hand in the gripping area of the housing of the control switch or a use of the control switch. In ergonomically speaking, this leads to an improvement, since the operator does not have to actively operate a deadman button. In addition, unwanted interruptions in the operation are avoided because the activation of the control switch is not dependent on the permanent holding down a deadman button, but only on the fact that an operator holds the control switch in his hand. Also, the operation of the control switch changes or is not limited compared to known models, since the sensors are not perceived by the operator. Furthermore, these sensors are robust, so that a suitability for the operation of a crane is given. The use of two sensors increases the likelihood that only one operator hand or operator using the controller will cause the activation.
- a hand recognition could also take place indirectly in connection with a wireless solution and a transponder located on the hand or the body and to be recognized.
- the at least one sensor and the further sensor are connected to a logic circuit which sends an activation signal to the safety circuit when the near field sensor and the further sensor each detect an operator or detect a use of the control switch. This increases the safety with respect to the detection and the function of the sensors
- the near field starting from the gripping area, extends a maximum of 3 mm, preferably a maximum of 2 mm. This reliably ensures that inadvertent operation of the control switch can not take place. Also, the desired deadman function is achieved by this small close range.
- the at least one first sensor is arranged in the interior of a housing of the control switch such that a hand of the operator holding the control switch can be recognized by the sensor.
- the sensors are thus integrated in the housing and are not perceived by the user and do not interfere with the operation of the control switch.
- At least one further sensor is arranged in the interior of the housing, which sensor is designed as a near-field sensor, acceleration sensor, as an optical sensor or as an inclination sensor. An activation of the control switch is then only if in addition to the detection by the capacitive sensor and a detection by the other sensor is present.
- the second sensor is designed as a near-field sensor and the first sensor and the second sensor are arranged at a distance from each other in the housing. The spacing increases the likelihood that only one operator's hand will trigger the activation.
- a second near-field sensor and a third near-field sensor are arranged in the interior of the housing of the control switch such that a hand holding the control switch of the operator of the second sensor or the third sensor in addition to the first Sensor is recognizable.
- the control switch can also be placed on an object without an activation takes place.
- the at least one first near field sensor is a capacitive sensor or a radio sensor.
- the first, second and third sensors are designed as capacitive sensors, each comprising a first, second and third electrode, the first electrode, the second electrode and the third electrode at a distance, preferably orthogonal in different spatial Layers are arranged to each other in the housing.
- the spacing and, where appropriate, the spatial arrangement of the electrodes increases the likelihood that only one operator's hand will cause the activation.
- first electrode in the region of a bottom of the housing, the second electrode in the region of a left longitudinal side of the housing and the third electrode in the region of a right longitudinal side of the housing is arranged. In order to allows both right- and left-handed operation.
- the near field sensor and the further sensor are connected to a logic circuit which sends an activation signal to the safety circuit when the near field sensor and the further sensor each detect an operator.
- the first, second and third sensor are connected to a logic circuit that sends an activation signal to the safety circuit when the first sensor and one of the second and third sensors each detect an operator.
- FIG. 1 shows a plan view of a wireless control switch 1 according to the invention, which is designed as a radio-operated and portable hand control switch.
- the control switch 1 consists in a conventional manner of a substantially cuboidal housing 2 with rounded corners, on the upper side 2a more controls 3 and a display 4 are arranged.
- the shape and dimensions of the control switch 1 are dimensioned so that it fits well on a gripping area 2f of a hand 13 of an operator (see FIG. 2 ) can be surrounded and the controls 3 are easily accessible and operable with the thumb.
- the controls 3 are designed as a single or multi-stage button or mini-joystick and wear in a conventional manner symbols, each corresponding to an operating function for a crane.
- control switch 1 for an indoor crane
- the symbols show the functions lifting, lowering, crab drive right, Katzfahrt left, crane forward, crane movement backwards as well as freely assignable special functions such as operation of a horn.
- the mini-joysticks for example, control the travel movements of crane and cat.
- the display 4 for example, the state of charge of a battery or operating states of the control switch 1 can be displayed.
- By operating one of the controls 3 of the control switch 1 corresponding control signals are generated for the respective operating function and sent wirelessly to the crane and thus triggered the respective control process.
- the housing 2 there is enough space to accommodate unillustrated components such as a rechargeable battery 5, mechanical and electrical parts of the controls 3, and a control circuit 6 for generating, processing, transmitting, and receiving control signals.
- a rechargeable battery 5 for generating, processing, transmitting, and receiving control signals.
- the battery 5 and the control circuit 6 are in the FIG. 2 shown schematically.
- safety circuit 7 is provided to prevent inadvertent operation of the control switch 1.
- the control switch 1 between a safety state and an operating state as needed switchable back and forth.
- the controls 3 - With the exception of the stop button - disabled.
- it can not come to an unintentional operation of the crane, for example, by not deposited or stored on the control switch 1 items or the fall of the control switch.
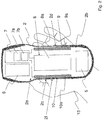
- FIG. 2 shows a sectional view of the control switch according to FIG. 1 ,
- the housing 2 consists of an upper part and a lower part, so that the FIG. 2 the bowl-shaped lower part with a bottom 2b, a left longitudinal side 2c and a right longitudinal side 2d shows.
- the control circuit 6 and the safety circuit 7 at the upper end of the housing 2 are shown schematically next to the battery 6 at the lower end of the housing 2.
- the safety circuit 7 is divided into a logic part 7a and a monitoring part 7b.
- the monitoring part 7b cyclically checks the correct function of the sensors 8, 9, 10. This monitoring function can also be implemented in the control circuit 6.
- a first sensor 8, second sensor 9 and a third sensor 10 are disposed inside 2e of the housing 2.
- Each of the sensors 8, 9 and 10 is designed as a near-field sensor with a near-field region of a maximum of 3 mm, preferably a maximum of 2 mm. This near field area is located in the gripping area 2f of the control switch 2. By means of such a near field sensor, a hand 13 of an operator can be detected when it is in the near field area.
- Near-field sensors can be sensors with capacitive electrodes or radio antennas.
- the sensors 8, 9 and 10 are formed as touch-sensitive capacitive sensors, each having a flat plate-shaped and rectangular electrodes 8a, 9a and 10a, which are arranged in the longitudinal direction L of the housing 2 in the middle and thus in the gripping area 2f of a control switch 1 embracing hand 13 of an operator.
- the electrodes 8a, 9a and 10a are plate-shaped or rod-shaped.
- the first electrode 8a is aligned with its longitudinal extent in the longitudinal direction L of the housing 2 and arranged on the underside 2b of the housing 2 and thus is the center of a hand of an operator encompassing the control switch 1 opposite. Usually lies in the operation of the control switch 1, this with its bottom 2b in the palm of the operator.
- the palm of his hand is on his hand from the outside on the right longitudinal side 2 d of the control switch 1 at.
- the second electrode 9b is arranged and aligned with its longitudinal extension in the longitudinal direction L of the housing 2.
- the second electrode 9b thus lies opposite the palm of the hand.
- the third electrode 10a is disposed opposite to the second electrode 9b inside on the left longitudinal side 2c of the housing 2 and also aligned with its longitudinal extent in the longitudinal direction L of the housing 2.
- the fingers are only slightly or not from the outside on the left longitudinal side 2c, so that they are not the third sensor 10 opposite.
- the third sensor 10 is thus used when the control switch 1 is held by a left-hander, since then the palm of your hand rests against the left longitudinal side 2c.
- the rectangular electrodes 8a, 9a and 10a are made of a conductive material, preferably copper or a copper alloy.
- the capacitance required for the electrodes 8a, 9a and 10a depends, inter alia, on the size and position of the electrodes 8a, 9a and 10a in the housing 2, the material of the housing 2 and the electrodes 8a, 9a and 10a.
- the plate-like or rod-shaped shape of the electrodes 8a, 9a and 10a it is also conceivable that these to evaporate on the inside of the case.
- the electrodes 8a, 9a and 10a of the sensors 8, 9 and 10 are in this case designed and disposed within the housing 2 of the control switch 1 that a touch on an outside of the housing 2 to the control switch 1 of the sensors 8, 9 and 10 without a direct contact with their electrodes 8a, 9a and 10a leads to a detectable capacitance change and thus also to the detection of an adjacent hand. It is irrelevant whether the hand has direct contact with the housing or the operator wears a glove. In order to be able to output a corresponding output signal in the case of a hand recognition, the sensors 8, 9 and 10 work with a recognition circuit 8b, 9b and 10b (see FIG FIG.
- a quiescent value may change depending on environmental conditions. Since a predetermined change in capacitance leads to an output signal in the sense of a hand recognition, a corresponding adaptation of the associated absolute values takes place.
- the sensors 8, 9 and 10 cooperate with the safety circuit 7 to activate and deactivate the control switch 1 in the manner of a dead man's circuit.
- the detection circuits 8b, 9b and 10b are connected to the safety circuit 7 via first, second and third signal lines 8c, 9c and 10.
- the detection circuits 8b, 9b and 10b are not shown. These can also be arranged together on a circuit board with the safety circuit 7, so that the first, second and third signal lines 8c, 9c and 10c are printed conductors.
- the control switch 1 in particular the bottom 2b and one of the long sides 2c and 2d with an object, which is usually the hand 13 of an operator in contact.
- the control circuit 1 is activated by the safety circuit 7.
- the control switch 1 remains activated only as long as such an applied hand is detected.
- the safety circuit 7 continuously queries the state of the sensors 8, 9 and 10. Accordingly, the safety circuit 2 deactivates the control switch 1, when no operator's hand is detected anymore. This deactivation is usually associated with a locking of the controls 3, so that all crane functions come to a standstill with the exception of the stop button.
- the control switch 1 Since not only touches of one hand, but also touches by any, both electrically conductive and dielectric material can be detected via the sensors 8, 9 and 10, it must be ruled out that the control switch 1 is already activated by merely resting on a workbench, for example becomes. Therefore, the first electrode 8a is offset from the second or third electrode 9a, 10a by approximately 90 degrees, so that they do not lie in a common plane of the housing 2 of the control switch 1.
- FIG. 3 shows a schematic diagram of the logic circuit 7a within the safety circuit of the control switch 1.
- the sensors 8, 9 and 10 with their electrodes 8a, 9a and 10a and detection circuits 8b, 9b and 10b interconnected with the target that for Activation of the control switch 1 must reach at least two sensors 8, 9 and 10 in a detection state.
- first, second and third signal lines 8c, 9c and 10c of the sensors 8, 9 and 10 are provided on the output side of their detection circuits 8b, 9b and 10b.
- the logic circuit is designed as a two-channel system, wherein the first electrode 8a is assigned to the bottom 2b of the housing 2 a first channel and the second and third electrode 9a, 10a on the longitudinal sides 2c, 2d of the housing 2 is associated with a second channel.
- the output signals of the first and the second channel are linked via an AND circuit 11, so that the palm and palms of the operator of the sensors 8, 9 and 10 must be recognized for activation of the control switch 1.
- the two opposing sensors 9 and 10 are provided, of which corresponding manner only one of the palm of the operator is detected, is a link via an OR circuit 12 in the second Channel provided.
- the safety circuit 7 activates the control switch 1 only when both channels of the safety circuit 7 detect an applied hand.
- the output signals of the OR circuit 12 and the detection circuit 8b are monitored by the monitoring circuit 7b.
- the logic circuit 7a and / or the monitoring circuit 7b can also by Microcomputer technology can be realized.
- two micro-controllers are then preferably required. Both receive the sensor information and compare the respective output signals. Only if they match the controls 3 are unlocked.
- FIG. 4 shows a substantially the schematic diagram according to FIG. 3 corresponding circuit diagram, so that reference can essentially be made to the preceding description.
- the main difference is that only two sensors 8, 9 are used.
- the first sensor 8 is designed as a capacitive sensor and the second sensor 9 as a tilt sensor.
- the OR circuit 12 can be omitted, since the inclination sensor operates independently of the operation of the control switch 1 by a right or left-handed. Accordingly, the output signals of the two detection circuits 8b and 9b are monitored by the monitoring circuit 7b.
- the present invention is described with reference to a radio controlled control switch 1.
- the invention in an infrared-operated control switch or other wireless methods for data transmission.
- the control switch 1 is designed as a conventional suspension control switch and the control signals are sent via a control line connecting the suspension control switch with the crane.
- the present invention enables operation of machines in general, in the event the control switch is used.
- the sensors 8, 9 and 10 may be formed as an acceleration sensor, as an optical sensor or as a tilt sensor. These sensors can be arranged at any location in or on the housing 2 of the control switch 1.
- the side electrodes 9a and 10a may be replaced by portions of EMC gaskets consisting essentially of an elastic support and an electrically conductive wire mesh.
- the electrodes 8a, 9a and 10a be damped or glued electrodes. These sections then each assume the function of a capacitive sensor.
- the near-field sensor is described as a capacitive sensor with an electrode.
- the near-field sensor can also be designed as a radio sensor with an antenna, which is then arranged in the housing instead of the electrode.
- An RF sensor or radio sensor generally consists of an antenna and an RF module, both of which are arranged in the housing of the control switch and usually adjacent.
- the RF module has a transmitter (transmitter) with which electrical signals are converted into electromagnetic waves and transmitted via the antenna.
- RF modules that can transmit and receive (transceiver).
- the antenna dimensions are matched to the frequency of the electromagnetic waves to be transmitted and received or at the wavelength thereof.
- a transponder in particular RIFD transponder is then arranged, which is then detected.
- the near field sensor can also be designed as an IR transmitting diode and IR receiver diode, which is then arranged in the housing instead of the electrodes or radio sensors.
- IR transmitter diode and IR receiver diode are arranged opposite each other in terms of light barrier, so that the IR light path is interrupted by the operator's hand in order to generate the required signal "handle occupied".
- reflex photoelectric sensors can be used: IR transmitters and IR receivers are not arranged opposite each other but side by side. The operator's hand reflects the IR light as it approaches, so in this case, the "handle busy" signal is generated when the receiver receives the reflected IR light.
- near-field sensors base units of the so-called body-Com technology of Microchip Technology.
- the body-com technology uses bidirectional communication between a base unit that is installed in the housing of the switch and a mobile detection chip that is carried by the operator on the body or in the clothing.
- the signals to be transmitted are capacitively transmitted and received by the base unit and the detection chip, the human body serving as a communication channel.
- This technology implicitly recognizes the hand of an operator as the communication channel is established. For the purposes of the invention, this also means a hand recognition.
- an RFID transponder may also be worn by the operator near his thumb.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Switches That Are Operated By Magnetic Or Electric Fields (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
- Control And Safety Of Cranes (AREA)
Description
- Die Erfindung betrifft einen Steuerschalter für eine Bedienung einer Maschine, insbesondere eine drahtlose, tragbare und handbetätigbare Fernbedienung für einen Kran, mit einer Erfassungsvorrichtung, über die ein Bediener erfassbar ist, und mit einer Sicherheitsschaltung, über die der Steuerschalter bei Erfassen eines Bedieners aktivierbar ist und bei Nicht-Erfassen eines Bedieners deaktivierbar ist.
- Die deutsche Offenlegungsschrift
DE 10 2009 051 819 A1 offenbart einen Hängeschalter für einen Kran, dessen Bedienelemente über eine Sicherheitsschaltung aktivierbar und deaktivierbar sind. Die Sicherheitsschaltung umfasst ein RFID-Lesegerät, das in dem Hängeschalter angeordnet ist, und einen RFID-Transponder, der in Form eines Armbandes von einer zum Bedienen des Krans berechtigten Bedienperson getragen wird. Das RFID-Lesegerät hat eine Signalstärke mit einer geringen Reichweite im Bereich von etwa 20 cm bis 30 cm. Über die Sicherheitsschaltung wird erreicht, dass die Bedienelemente des Hängeschalter nur solange aktiviert werden und somit der Kran auch nur solange bedienbar bleibt, wie sich eine berechtigte Bedienperson in hinreichender Nähe zu dem Steuerschalter befindet, d.h. der RIFD-Transponder im Empfangsbereich des RFID-Lesegeräts ist. Sobald die Bedienperson beziehungsweise deren RFID-Transponder sich zu weit aus dem Empfangsbereich des RFID-Lesegerätes entfernt, erfolgt über die Sicherheitsschaltung eine Deaktivierung der Bedienelemente des Hängeschalters. - Außerdem ist auf der Internetseite (www.hbc-radiomatic.com) der HBC-radiomatic GmbH unter dem Produktnamen "radiomatic pilot" ein drahtloser Steuerschalter für einen Kran beschrieben, der einen Mikro-Joystick und einen Neigungssensor als Bedienelemente aufweist. Auf dem Mikro-Joystick ist ein sogenannter Totmanntaster angeordnet, der mit dem Daumen gedrückt werden muss, um mit dem Mikro-Joystick arbeiten zu können. Hierdurch soll ein unbeabsichtigtes Auslösen von Kranfunktionen verhindert werden. Der Neigungssensor in dem Steuerschalter wird durch einen von einem Zeigefinger gedrückten Freigabetaster auf der Unterseite des Steuerschalters aktiviert. Sobald der Freigabetaster losgelassen wird, wird der Neigungssensor deaktiviert. Über den Neigungssensor können Hub- oder Senkbewegungen sowie Fahrbewegungen einer Krankatze initiiert werden.
- Des Weiteren ist aus der deutschen Offenlegungsschrift
DE 199 21 349 A1 eine Totmannschaltung für eine Kreissäge bekannt. Die Kreissäge weist einen mittels eines Vorschubantriebes verfahrbaren Besäumtisch auf. Der Vorschubantrieb ist über einen Drehgriff steuerbar. Um zu unterbinden, dass der Vorschubantrieb ungewollt beziehungsweise unbeaufsichtigt läuft, ist die Totmannschaltung in Form eines kapazitiven, induktiven, mechanischen und/oder elektrischen Sensors im Bereich des Drehgriffs vorgesehen. Hierdurch wird erreicht, dass bei einer Berührung des Drehgriffs durch eine Bedienperson die Anwesenheit der Bedienperson detektiert wird, was eine Freigabe des Vorschubantriebs durch die Totmannschaltung auslöst. - Der Erfindung liegt die Aufgabe zugrunde, einen Steuerschalter für eine Bedienung eines Krans, insbesondere eine drahtlose, tragbare und handbetätigbare Fernbedienung, bereit zu stellen, der eine verbesserte Sicherheitsschaltung zur Aktivierung und Deaktivierung des Steuerschalters umfasst.
- Diese Aufgabe wird durch eine Steuerschalter für eine Bedienung eines Krans, insbesondere eine drahtlose, tragbare und handbetätigbare Fernbedienung, mit den Merkmalen des Anspruchs 1 gelöst. In den Unteransprüchen 2 bis 11 sind vorteilhafte Ausgestaltungen der Erfindung angegeben.
- Erfindungsgemäß wird bei einem Steuerschalter für eine Bedienung eines Krans, insbesondere eine drahtlose, tragbare und handbetätigbare Fernbedienung, mit einer Erfassungsvorrichtung, über die ein Bediener erfassbar ist, und mit einem einen Greifbereich für einen Bediener aufweisenden Gehäuse und mit einer Sicherheitsschaltung, über die der Steuerschalter bei Erfassen eines Bedieners aktivierbar ist und bei Nicht-Erfassen eines Bedieners deaktivierbar ist, eine Verbesserung dadurch erreicht, dass die Erfassungsvorrichtung mindestens einen Sensor umfasst, der in einem Nahfeld eine den Steuerschalter im Greifbereich haltende Hand des Bedieners erkennt, und die Erfassungsvorrichtung mindestens einen weiteren Sensor umfasst, der eine Benutzung des Steuerschalters erkennt. Hierdurch kann in ergonomisch vorteilhafter Weise auf die Verwendung sogenannter Totmanntaster verzichtet werden. Die mindestens zwei Sensoren zusammen mit der Sicherheitsschaltung übernehmen die Totmannfunktion und erkennen kontinuierlich die Anwesenheit der Bedienerhand im Greifbereich des Gehäuses des Steuerschalters beziehungsweise eine Benutzung des Steuerschalters. In ergonomischer Sicht führt dies zu einer Verbesserung, da der Bediener nicht aktiv einen Totmanntaster betätigen muss. Zudem werden ungewollte Unterbrechungen bei der Bedienung vermieden, da die Aktivierung des Steuerschalters nicht von dem permanenten Niederhalten eines Totmanntasters, sondern lediglich davon abhängt, dass eine Bedienperson den Steuerschalter in der Hand hält. Auch ändert sich die Bedienung des Steuerschalters oder wird diese eingeschränkt gegenüber bekannten Modellen nicht, da die Sensoren von dem Bediener nicht wahrgenommen werden. Ferner sind diese Sensoren robust, so dass eine Eignung für die Bedienung eines Krans gegeben ist. Die Verwendung von zwei Sensoren erhöht die Wahrscheinlichkeit, dass nur eine Bedienerhand beziehungsweise ein die Steuerung benutzender Bediener die Aktivierung hervorruft.
- Eine Handerkennung könnte im Sinne der Erfindung auch indirekt im Zusammenhang mit einer Funklösung und einen an der Hand oder dem Körper befindlichen und zu erkennenden Transponder erfolgen.
- Des Weiteren ist vorteilhafter vorgesehen, dass der mindestens eine Sensor und der weitere Sensor mit einer Logikschaltung verbunden sind, die ein Aktivierungssignal an die Sicherheitsschaltung sendet, wenn der Nahfeld-Sensor und der weitere Sensor jeweils einen Bediener erfassen beziehungsweise eine Benutzung des Steuerschalters erkennen. Hierdurch wird die Sicherheit in Bezug auf die Erkennung und die Funktion der Sensoren erhöht
- Vorteilhafter Weise ist vorgesehen, dass sich das Nahfeld ausgehend von dem Greifbereich maximal 3 mm, vorzugsweise maximal 2 mm, ausdehnt. Hierdurch wird zuverlässig gewährleistet, dass eine unbeabsichtigte Betätigung des Steuerschalters nicht stattfinden kann. Auch wird durch diesen kleinen Nahbereich die gewünschte Totmannfunktion erreicht.
- Vorteilhafter Weise ist vorgesehen, dass der mindestens eine erste Sensor im Inneren eines Gehäuses des Steuerschalters derart angeordnet ist, dass eine den Steuerschalter haltende Hand des Bedieners von dem Sensor erkennbar ist. Hierdurch ist eine zuverlässige Erkennung der Bedienerhand möglich. Auch sind die Sensoren somit im Gehäuse integriert und werden von dem Benutzer nicht wahrgenommen und behindern diesen nicht bei der Bedienung des Steuerschalters.
- Zur Erhöhung der Erkennungssicherheit und der Vermeidung einer Fehlerkennung durch Hinlegen des Steuerschalters auf einen Gegenstand ist vorgesehen, dass im Inneren des Gehäuses mindestens ein weiterer Sensor angeordnet ist, der als Nahfeld-Sensor, Beschleunigungssensor, als optischer Sensor oder als Neigungssensor ausgebildet ist. Eine Aktivierung des Steuerschalters erfolgt dann nur wenn neben der Erkennung durch den kapazitiven Sensor auch eine Erkennung durch den anderen Sensor vorliegt.
- In bevorzugter Ausgestaltung ist vorgesehen, dass der zweite Sensor als NahfeldSensor ausgebildet ist und der erste Sensor und der zweite Sensor mit Abstand zueinander im Gehäuse angeordnet sind. Die Beabstandung erhöht die Wahrscheinlichkeit, dass nur eine Bedienerhand die Aktivierung hervorruft.
- In einer besonderen bevorzugten Ausgestaltung ist vorgesehen, dass ein zweiter Nahfeld-Sensor und ein dritter Nahfeld-Sensor im Inneren des Gehäuses des Steuerschalters derart angeordnet sind, dass eine den Steuerschalter haltende Hand des Bedieners von dem zweiten Sensor oder dem dritten Sensor zusätzlich zu dem ersten Sensor erkennbar ist. Somit kann der Steuerschalter auch auf einem Gegenstand aufgelegt werden, ohne dass eine Aktivierung erfolgt.
- In bevorzugter Ausgestaltung ist vorgesehen, dass der mindestens eine erste Nahfeld-Sensor ein kapazitiver Sensor oder ein Funk-Sensor ist.
- In konstruktiv vorteilhafter Weise ist vorgesehen, dass die ersten, zweiten und dritten Sensoren als kapazitive Sensoren ausgebildet sind, jeweils eine erste, zweite und dritte Elektrode umfassen, die erste Elektrode, die zweite Elektrode und die dritte Elektrode mit Abstand, vorzugsweise orthogonal in verschiedenen räumlichen Ebenen, zueinander im Gehäuse angeordnet sind. Die Beabstandung und gegebenenfalls die räumliche Anordnung der Elektroden erhöht die Wahrscheinlichkeit, dass nur eine Bedienerhand die Aktivierung hervorruft.
- Im Zusammenhang mit einem quaderförmigen Gehäuse des Steuerschalters ist vorteilhaft, dass die erste Elektrode im Bereich einer Unterseite des Gehäuses, die zweite Elektrode im Bereich einer linken Längsseite des Gehäuses und die dritte Elektrode im Bereich einer rechten Längsseite des Gehäuses angeordnet ist. Damit sowohl eine rechts- wie eine linkshändige Bedienung ermöglicht.
- Zur Ansteuerung der Sicherheitsschaltung ist vorgesehen, dass der Nahfeld-Sensor und der weitere Sensor mit einer Logikschaltung verbunden sind, die ein Aktivierungssignal an die Sicherheitsschaltung sendet, wenn der Nahfeld-Sensor und der weitere Sensor jeweils einen Bediener erfassen.
- Alternativ ist zur Ansteuerung der Sicherheitsschaltung vorgesehen, dass der erste, zweite und dritte Sensor mit einer Logikschaltung verbunden sind, die ein Aktivierungssignal an die Sicherheitsschaltung sendet, wenn der erste Sensor und einer der zweiten und dritten Sensoren jeweils einen Bediener erfassen.
- Nachfolgend wird die vorliegende Erfindung an Hand eines in einer Zeichnung gezeigten Ausführungsbeispiels näher erläutert. Es zeigen:
-
Figur 1 eine Draufsicht auf einen erfindungsgemäßen Steuerschalter, -
Figur 2 eine Schnittansicht des Steuerschalters gemäßFigur 1 , -
Figur 3 ein schematisches Schaltbild einer Logikschaltung in einer Sicherheitsschaltung des Steuerschalters nachFigur 1 mit drei Sensoren und -
Figur 4 ein schematisches Schaltbild einer Logikschaltung in einer Sicherheitsschaltung des Steuerschalters nachFigur 1 mit zwei Sensoren. - Die
Figur 1 zeigt eine Draufsicht auf einen erfindungsgemäßen drahtlosen Steuerschalter 1, der als funkbetriebener und tragbarer Handsteuerschalter ausgebildet ist. Der Steuerschalter 1 besteht in üblicher Weise aus einem im Wesentlichen quaderförmigen Gehäuse 2 mit abgerundeten Ecken, auf dessen Oberseite 2a mehrere Bedienelemente 3 und eine Anzeige 4 angeordnet sind. Die Form und Abmessungen des Steuerschalters 1 sind so dimensioniert, dass dieser gut an einem Greifbereich 2f von einer Hand 13 eines Bedieners (sieheFigur 2 ) umgriffen werden kann und die Bedienelemente 3 mit dem Daumen gut erreichbar und betätigbar sind. Die Bedienelemente 3 sind als ein- oder mehrstufige Taster oder Mini-Joystick ausgebildet und tragen in üblicher Weise Symbole, die jeweils einer Bedienfunktion für einen Kran entspricht. Im Zusammenhang mit einem Steuerschalter 1 für einen Hallenlaufkran zeigen die Symbole die Funktionen Heben, Senken, Katzfahrt rechts, Katzfahrt links, Kranfahrt vorwärts, Kranfahrt rückwärts sowie frei belegbare Sonderfunktionen wie beispielsweise Bedienung einer Hupe. Über die Mini-Joysticks werden beispielsweise die Fahrbewegungen von Kran und Katze gesteuert. Mittels der Anzeige 4 kann beispielsweise der Ladezustand einer Batterie oder Betriebszustände des Steuerschalters 1 angezeigt werden. Durch Betätigung eines der Bedienelemente 3 des Steuerschalters 1 werden für die jeweilige Bedienfunktion entsprechende Steuersignale erzeugt und drahtlos an den Kran gesendet und so der jeweilige Steuervorgang ausgelöst. In dem Gehäuse 2 ist ausreichend Raum um nicht dargestellte Bauteile wie eine aufladbare Batterie 5, mechanische und elektrische Teile der Bedienelemente 3 und eine Steuerschaltung 6 zum Generieren, Verarbeiten, Senden und Empfangen von Steuersignalen aufzunehmen. Die Batterie 5 und die Steuerschaltung 6 sind in derFigur 2 schematisch dargestellt. - Zusätzlich ist eine in der
Figur 2 angedeutete Sicherheitsschaltung 7 vorgesehen, um ein unbeabsichtigtes Bedienen des Steuerschalters 1 zu vermeiden. Über die Sicherheitsschaltung 7 ist der Steuerschalter 1 zwischen einem Sicherheitszustand und einen Betriebszustand je nach Bedarf hin und her schaltbar. In dem Sicherheitszustand sind die Bedienelemente 3 - unter Ausnahme des Stopp-Tasters - deaktiviert. Somit kann es beispielsweise nicht durch auf den Steuerschalter 1 abgesetzte oder abgelegte Gegenstände oder beim Herunterfallen des Steuerschalters 1 nicht zu einer ungewollten Betätigung des Krans kommen. - Die
Figur 2 zeigt eine Schnittansicht des Steuerschalters gemäßFigur 1 . Im vorliegenden Fall besteht das Gehäuse 2 aus einem oberen Teil und einem unteren Teil, so dass dieFigur 2 das schalenförmige Unterteil mit einer Unterseite 2b, einer linken Längsseite 2c und einer rechten Längsseite 2d zeigt. Im Inneren 2e des Gehäuses 2 sind schematisch neben der Batterie 6 am unteren Ende des Gehäuses 2, die Steuerschaltung 6 und die Sicherheitsschaltung 7 am oberen Ende des Gehäuses 2 dargestellt. Die Sicherheitsschaltung 7 ist in einen Logikteil 7a und einen Überwachungsteil 7b unterteilt. Der Überwachungsteil 7b überprüft zyklisch die korrekte Funktion der Sensoren 8, 9, 10. Diese Überwachungsfunktion kann auch in der Steuerschaltung 6 implementiert werden. Auch sind ein erster Sensor 8, zweiter Sensor 9 und ein dritter Sensor 10 im Inneren 2e des Gehäuses 2 angeordnet. Jeder der Sensoren 8, 9 und 10 ist als Nahfeld-Sensor mit einem Nahfeldbereich von maximal 3 mm, vorzugsweise maximal 2 mm, ausgebildet. Dieser Nahfeldbereich befindet sich im Greifbereich 2f des Steuerschalters 2. Mittels eines derartigen Nahfeldsensors kann eine Hand 13 eines Bedieners erkannt werden, wenn diese sich im Nahfeldbereich befindet. Nahfeld-Sensoren können Sensoren mit kapazitiven Elektroden oder Funkantennen sein. - In dem vorliegenden Ausführungsbeispiel sind die Sensoren 8, 9 und 10 als berührungsempfindliche kapazitive Sensoren ausgebildet, die jeweils eine flache plattenförmige und rechteckförmige Elektrode 8a, 9a und 10a aufweisen, die in Längsrichtung L des Gehäuses 2 gesehen in der Mitte angeordnet sind und somit im Greifbereich 2f einer den Steuerschalter 1 umgreifenden Hand 13 eines Bedieners. Die Elektroden 8a, 9a und 10a sind platten- oder stabförmig. Der erste Elektrode 8a ist mit ihrer Längserstreckung in Längsrichtung L des Gehäuses 2 ausgerichtet und an der Unterseite 2b des Gehäuses 2 angeordnet und liegt somit der Mittelhand eines den Steuerschalter 1 umgreifenden Hand eines Bedieners gegenüber. Üblicherweise liegt bei der Bedienung des Steuerschalters 1, dieser mit seiner Unterseite 2b im Handteller des Bedieners. Für den Fall, dass der Steuerschalter 1 in der Hand eines Rechtshänders liegt, liegt der Handballen seiner Hand von außen auf der rechten Längsseite 2d des Steuerschalters 1 an. Innen an der rechten Längsseite 2d ist die zweite Elektrode 9b angeordnet und mit ihrer Längserstreckung in Längsrichtung L des Gehäuses 2 ausgerichtet. Die zweite Elektrode 9b liegt somit dem Handballen gegenüber. Die dritte Elektrode 10a ist gegenüberliegend zu der zweiten Elektrode 9b innen an der linken Längsseite 2c des Gehäuses 2 angeordnet und ebenfalls mit ihrer Längserstreckung in Längsrichtung L des Gehäuses 2 ausgerichtet. Bei einer geschlossenen Hand liegen die Finger nur leicht oder nicht von außen an der linken Längsseite 2c an, so dass die nicht dem dritten Sensor 10 gegenüber liegen. Der dritte Sensor 10 kommt somit zum Einsatz, wenn der Steuerschalter 1 von einem Linkshänder gehalten wird, da dann der Handballen an der linken Längsseite 2c anliegt.
- Die rechteckigen Elektroden 8a, 9a und 10a sind aus einem leitfähigem Material, vorzugsweise Kupfer beziehungsweise einer Kupferlegierung, hergestellt. Die für die Elektroden 8a, 9a und 10a erforderliche Kapazität hängt unter anderem von der Größe und der Position der Elektroden 8a, 9a und 10a im Gehäuse 2, dem Material des Gehäuses 2 und der Elektroden 8a, 9a und 10a ab. Anstatt der platten- oder stabförmigen Gestalt der Elektroden 8a, 9a und 10a ist es auch denkbar, diese von innen auf das Gehäuse aufzudampfen. Die Elektroden 8a, 9a und 10a der Sensoren 8, 9 und 10 sind hierbei so ausgelegt und innerhalb des Gehäuses 2 des Steuerschalters 1 angeordnet, dass eine Berührung an einer Außenseite des Gehäuses 2 an des Steuerschalters 1 von den Sensoren 8, 9 und 10 ohne einen direkten Kontakt zu deren Elektroden 8a, 9a und 10a zu einer detektierbaren Kapazitätsänderung und somit auch zur Detektion einer anliegenden Hand führt. Hierbei ist es unerheblich, ob die Hand direkt Kontakt mit dem Gehäuse hat oder der Bediener einen Handschuh trägt. Um bei einer Handerkennung ein entsprechendes Ausgangssignal ausgeben zu können, arbeiten die Sensoren 8, 9 und 10 mit einer Erkennungsschaltung 8b, 9b und 10b (siehe
Figur 3 ) zusammen, die jeweils im Wesentlichen aus einem integrierten Schaltkreis besteht, der ausgehend von einem Ruhewert, d.h. Kapazität des Gehäuses 2 ohne anliegende Hand 13 bei vorbestimmten Kapazitätsänderung schaltet und somit ein Ausgangssignal liefert. Üblicherweise erfolgt die Einstellung der Sensibilität der Sensoren über Kondensatoren und Widerstände, die Bestand der Erkennungsschaltung 8b, 9b und 10b sind. Der Ruhewert kann sich in Abhängigkeit von Umgebungsbedingungen ändern. Da eine vorbestimmte Kapazitätsänderung zu einem Ausgangssignal im Sinne einer Handerkennung führt, erfolgt eine entsprechende Anpassung der zugehörigen absoluten Werte. - Die Sensoren 8, 9 und 10 wirken mit der Sicherheitsschaltung 7 zusammen, um nach Art einer Totmannschaltung den Steuerschalter 1 zu aktivieren und deaktivieren. Hierfür sind die Erkennungsschaltungen 8b, 9b und 10b über erste, zweite und dritte Signalleitungen 8c, 9c und 10 mit der Sicherheitsschaltung 7 verbunden. In der
Figur 2 sind die Erkennungsschaltungen 8b, 9b und 10b nicht dargestellt. Diese können auch gemeinsam auf einer Platine mit der Sicherheitsschaltung 7 angeordnet sein, so dass die ersten, zweiten und dritten Signalleitungen 8c, 9c und 10c dann Leiterbahnen sind. Über die Sicherheitsschaltung 7 beziehungsweise die Sensoren 8, 9 und 10 wird erkannt, ob der Steuerschalter 1, insbesondere deren Unterseite 2b und einer der Längsseiten 2c und 2d mit einem Gegenstand, der üblicherweise die Hand 13 eines Bedieners ist, in Kontakt steht. Wird die Hand eines Bedieners erkannt, wird von der Sicherheitsschaltung 7 der Steuerschalter 1 aktiviert. Der Steuerschalter 1 bleibt nur so lange aktiviert, wie eine derart anliegende Hand detektiert wird. Die Sicherheitsschaltung 7 fragt hierzu kontinuierlich den Zustand der Sensoren 8, 9 und 10 ab. Entsprechend deaktiviert die Sicherheitsschaltung 2 den Steuerschalter 1, wenn keine Hand eines Bedieners mehr erkannt wird. Diese Deaktivierung geht üblicherweise mit einem Sperren der Bedienungselemente 3 einher, so dass alle Kranfunktionen zum Stillstand mit Ausnahme des Stopp-Tasters kommen. - Da über die Sensoren 8, 9 und 10 nicht nur Berührungen einer Hand, sondern auch Berührungen durch jedes beliebige, sowohl elektrisch leitende als auch dielektrische Material detektiert werden können, muss ausgeschlossen werden, dass der Steuerschalter 1 bereits durch bloßes Aufliegen beispielsweise auf einer Werkbank aktiviert wird. Daher ist die erste Elektrode 8a gegenüber der zweiten oder dritten Elektrode 9a, 10a etwa um 90 Grad versetzt angeordnet, so dass diese nicht in einer gemeinsamen Ebene des Gehäuses 2 des Steuerschalters 1 liegen.
- Die
Figur 3 zeigt ein schematisches Schaltbild der Logikschaltung 7a innerhalb der Sicherheitsschaltung des Steuerschalters 1. Über diese Logikschaltung 7a werden die Sensoren 8, 9 und 10 mit Ihren Elektroden 8a, 9a und 10a und Erkennungsschaltungen 8b, 9b und 10b mit dem Ziel untereinander verbunden, dass für eine Aktivierung des Steuerschalters 1 mindestens zwei Sensoren 8, 9 und 10 in einen Erkennungszustand gelangen müssen. Hierbei sind erste, zweite und dritte Signalleitungen 8c, 9c und 10c der Sensoren 8, 9 und 10 ausgangsseitig an deren Erkennungsschaltungen 8b, 9b und 10b vorgesehen. Die Logikschaltung ist als zweikanaliges System ausgebildet, wobei die erste Elektrode 8a an der Unterseite 2b des Gehäuses 2 einem ersten Kanal zugeordnet ist und die zweite und dritte Elektrode 9a, 10a an den Längsseiten 2c, 2d des Gehäuses 2 einem zweiten Kanal zugeordnet ist. Die Ausgangssignale des ersten und des zweiten Kanals sind über eine UND-Schaltung 11 verknüpft, so dass Handfläche und Handballen des Bedieners von den Sensoren 8, 9 und 10 für eine Aktivierung des Steuerschalters 1 erkannt werden müssen. In Bezug auf den Rechts- und Linkshand-Betrieb des Steuerschalters 1 sind die beiden gegenüberliegenden Sensoren 9 und 10 vorgesehen, von denen entsprechender Weise jeweils nur einer von dem Handballen des Bedieners erkannt wird, ist eine Verknüpfung über eine ODER-Schaltung 12 in dem zweiten Kanal vorgesehen. Dementsprechend aktiviert die Sicherheitsschaltung 7 den Steuerschalter 1 nur dann, wenn beide Kanäle der Sicherheitsschaltung 7 eine anliegende Hand detektieren. Die Ausgangssignale der ODER-Schaltung 12 und der Erkennungsschaltung 8b werden von der Überwachungsschaltung 7b überwacht. Die Logikschaltung 7a und/oder die Überwachungsschaltung 7b kann auch durch Mikrocomputertechnik verwirklicht werden. Um eine redundante, zweikanalige Sicherheitsschaltung 7 zu realisieren, sind dann vorzugsweise zwei Mikrokontroller erforderlich. Beide erhalten die Sensorinformationen und vergleichen die jeweiligen Ausgangssignale. Nur bei Übereinstimmung werden die Bedienelemente 3 freigeschaltet. - Die
Figur 4 zeigt ein im Wesentlichen dem schematischen Schaltbild gemäßFigur 3 entsprechendes Schaltbild, so dass im Wesentlichen auf die vorhergehende Beschreibung verwiesen werden kann. Der wesentliche Unterschied besteht darin, dass nur zwei Sensoren 8, 9 zum Einsatz kommen. Der erste Sensor 8 ist als kapazitiver Sensor und der zweite Sensor 9 als Neigungssensor ausgebildet. Auch hier kommt eine zweikanalige Signalverarbeitung zum Einsatz, wobei jedoch die ODER-Schaltung 12 entfallen kann, da der Neigungssensor unabhängig von der Bedienung des Steuerschalters 1 durch einen Rechts- oder Linkshänder arbeitet. Entsprechend werden die Ausgangssignale der beiden Erkennungsschaltung 8b und 9b von der Überwachungsschaltung 7b überwacht. - Die vorliegende Erfindung ist an Hand eines funkbetriebenen Steuerschalters 1 beschrieben. Es ist grundsätzlich auch denkbar, die Erfindung bei einem infrarotbetriebenen Steuerschalter oder andere drahtlose Verfahren zur Datenübertragung einzusetzen. Selbstverständlich ist es alternativ auch möglich, dass der Steuerschalter 1 als konventioneller Hängesteuerschalter ausgebildet ist und die Steuersignale über eine den Hängesteuerschalter mit dem Kran verbindende Steuerleitung gesendet werden. Unabhängig davon ermöglicht die vorliegende Erfindung eine Bedienung von Maschinen allgemein, für den Fall, das Steuerschalter zum Einsatz kommen. Auch können die Sensoren 8, 9 und 10 als Beschleunigungssensor, als optischer Sensor oder als Neigungssensor ausgebildet sein. Diese Sensoren können an beliebigen Orten in oder an dem Gehäuse 2 des Steuerschalters 1 angeordnet werden. Sicherheitstechnisch bevorzugt wäre eine Kombination von verschiedenen Sensortechnologien, beispielsweise eines kapazitiven ersten Sensors 8 mit nur einem weiteren Neigungssensor, die zweikanalig über eine UND-Schaltung miteinander verbunden sind. Alternativ können die seitlichen Elektroden 9a und 10a durch Abschnitte von EMV-Dichtungen ersetzt werden, die im Wesentlichen aus einem elastischem Träger und einem elektrisch leitenden Drahtgewebe bestehen. Auch können die Elektroden 8a, 9a und 10a aufgedämpfte oder aufgeklebte Elektroden sein. Diese Abschnitte übernehmen dann jeweils die Funktion eines kapazitiven Sensors. Ferner ist im vorliegenden Ausführungsbeispiel der Nahfeld-Sensor als kapazitiver Sensor mit einer Elektrode beschrieben. Der Nahfeld-Sensor kann auch als Funksensor mit einer Antenne ausgebildet sein, die dann im Gehäuse an Stelle der Elektrode angeordnet wird. Ein RF-Sensor beziehungsweise Funksensor besteht im Allgemeinen aus einer Antenne und einem RF-Modul, die beide im Gehäuse des Steuerschalters und üblicherweise benachbart angeordnet sind. Das RF-Modul hat einen Sender (Transmitter) mit dem elektrische Signale in elektromagnetische Wellen umgewandelt und über die Antenne gesendet werden. Es gibt auch RF-Module, die Senden und Empfangen können (Transceiver). Die Antennenabmessungen sind an die Frequenz der zu sendenden und empfangenden elektromagnetischen Wellen beziehungsweise an deren Wellenlänge abgestimmt. Im Bereich der Bedienerhand ist dann ein Transponder, insbesondere RIFD-Transponder angeordnet, der dann erkannt wird. Des Weiteren kann der Nahfeld-Sensor auch als IR-Sendediode und IR-Empfängerdiode ausgebildet sein, die dann im Gehäuse an Stelle der Elektroden oder Funksensoren angeordnet wird. In einer Ausgestaltung sind IR-Sendediode und IR-Empfängerdiode lichtschrankenmäßig gegenüberliegend angeordnet, so dass die IR-Lichtstrecke durch die Bedienerhand unterbrochen, um das benötigte Signal "Griff belegt" zu erzeugen. Alternativ können sogenannte Reflex-Lichtschranken verwendet werden: Dabei sind IR-Sender und IR-Empfänger nicht gegenüber, sondern nebeneinander angeordnet. Die Bedienerhand reflektiert bei Annäherung das IR-Licht, so dass in diesem Fall das Signal "Griff belegt" erzeugt wird, wenn der Empfänger das reflektierte IR-Licht empfängt. Auch können als Nahfeld-Sensoren Basiseinheiten der sogenannten Body-Com-Technologie der Firma Mikrochip Technology eingesetzt werden. Die Body-Com-Technologie verwendet eine bidirektionale Kommunikation zwischen einer Basiseinheit, die im Gehäuse des Schalters eingebaut wird, und einen mobilen Erkennungschip, der von dem Bediener am Körper oder in der Kleidung mitgeführt wird. Die zu übertragenden Signale werden kapazitiv von der Basiseinheit und dem Erkennungschip gesendet und empfangen, wobei der menschliche Körper als Kommunikationskanal dient. Diese Technologie erkennt implizit die Hand eines Bedieners, wenn der Kommunikationskanal aufgebaut wird. Im Sinne der Erfindung wird hierunter auch eine Handerkennung verstanden. Anstatt der Body-Com-Technologie kann auch ein RFID-Transponder von dem Bediener in der Nähe seines Daumens getragen werden.
-
- 1
- Steuerschalter
- 2
- Gehäuse
- 2a
- Oberseite
- 2b
- Unterseite
- 2c
- linke Längsseite
- 2d
- rechte Längsseite
- 2e
- Inneren
- 2f
- Greifbereich
- 3
- Bedienelement
- 4
- Anzeige
- 5
- Batterie
- 6
- Steuerschaltung
- 7
- Sicherheitsschaltung
- 7a
- Logikschaltung
- 7b
- Überwachungsteil
- 8
- erster Sensor
- 8a
- erste Sensor-Elektrode
- 8b
- erste Erkennungsschaltung
- 8c
- erste Signalleitung
- 9
- zweiter Sensor
- 9a
- zweite Sensor-Elektrode
- 9b
- zweite Erkennungsschaltung
- 9c
- zweite Signalleitung
- 10
- dritter Sensor
- 10a
- dritte Sensor-Elektrode
- 10c
- dritte Signalleitung
- 10b
- dritte Erkennungsschaltung
- 11
- UND-Schaltung
- 12
- ODER-Schaltung
- 13
- Hand
Claims (11)
- Steuerschalter (1) für eine Bedienung einer Maschine, insbesondere eine drahtlose, tragbare und handbetätigbare Fernbedienung für einen Kran, mit einem einen Greifbereich (2f) für einen Bediener aufweisenden Gehäuse (2) und mit einer Erfassungsvorrichtung, über die ein Bediener erfassbar ist, und mit einer Sicherheitsschaltung (7), über die der Steuerschalter (1) bei Erfassen eines Bedieners aktivierbar ist und bei Nicht-Erfassen eines Bedieners deaktivierbar ist, dadurch gekennzeichnet, dass die Erfassungsvorrichtung mindestens einen Sensor (8, 9, 10) umfasst, der in einem Nahfeld eine den Steuerschalter (1) im Greifbereich (2f) haltende Hand des Bedieners erkennt und die Erfassungsvorrichtung mindestens einen weiteren Sensor (9, 10) umfasst, der eine Benutzung des Steuerschalters (1) erkennt.
- Steuerschalter (1) nach Anspruch 1, dadurch gekennzeichnet, dass der mindestens eine Sensor (8, 9, 10) und der weitere Sensor (9, 10) mit einer Logikschaltung (7a) verbunden sind, die ein Aktivierungssignal an die Sicherheitsschaltung (7) sendet, wenn der Nahfeld-Sensor (8) und der weitere Sensor (9, 10) jeweils einen Bediener erfassen beziehungsweise eine Benutzung des Steuerschalters (1) erkennen.
- Steuerschalter (1) nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass sich das Nahfeld ausgehend von dem Greifbereich (2) maximal 3 mm, vorzugsweise maximal 2 mm, ausdehnt.
- Steuerschalter (1) nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass ein erster Sensor (8) im Inneren (2e) eines Gehäuses (2) des Steuerschalters (1) derart angeordnet ist, dass eine den Steuerschalter (1) haltende Hand des Bedieners von dem ersten Sensor (8) erkennbar ist.
- Steuerschalter (1) nach Anspruch 4, dadurch gekennzeichnet, dass im Inneren (2e) des Gehäuses (2) mindestens ein zweiter Sensor (9, 10) angeordnet ist, der als Nahfeld-Sensor, Beschleunigungssensor, als optischer Sensor oder als Neigungssensor ausgebildet ist.
- Steuerschalter (1) nach Anspruch 5, dadurch gekennzeichnet, dass der zweite Sensor (9, 10) als Nahfeld-Sensor ausgebildet ist und der erste Sensor (8) und der zweite Sensor (9) mit Abstand zueinander im Gehäuse (2) angeordnet sind.
- Steuerschalter (1) nach Anspruch 4, dadurch gekennzeichnet, dass ein zweiter Sensor (9) und ein dritter Sensor (10) jeweils als Nahfeld-Sensoren ausgebildet sind und im Inneren (2e) des Gehäuses (2) des Steuerschalters (1) derart angeordnet sind, dass eine den Steuerschalter (1) haltende Hand des Bedieners von dem zweiten Sensor (9) oder dem dritten Sensor (10) zusätzlich zu dem ersten Sensor (8) erkennbar ist.
- Steuerschalter (1) nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass der erste Nahfeld-Sensor (8) ein kapazitiver Sensor oder ein Funk-Sensor ist.
- Steuerschalter (1) nach Anspruch 7 und 8, dadurch gekennzeichnet, dass die ersten, zweiten und dritten Sensoren (8, 9, 10) als kapazitive Sensoren ausgebildet sind, jeweils eine erste, zweite und dritte Elektrode (8a, 9a, 10a) umfassen, die erste Elektrode (8a), die zweite Elektrode (9a) und die dritte Elektrode (10a) mit Abstand zueinander im Gehäuse (2) angeordnet sind.
- Steuerschalter (1) nach Anspruch 9, dadurch gekennzeichnet, dass die erste Elektrode (8a) im Bereich einer Unterseite (2b) des Gehäuses (2), die zweite Elektrode (9a) im Bereich einer linken Längsseite (2c) des Gehäuses (2) und die dritte Elektrode (10a) im Bereich einer rechten Längsseite (2d) des Gehäuses (2) angeordnet ist.
- Steuerschalter (1) nach einem der Anspruch 7 bis 10, dadurch gekennzeichnet, dass der erste, zweite und dritte Sensor (8, 9, 10) mit einer Logikschaltung (7a) verbunden sind, die ein Aktivierungssignal an die Sicherheitsschaltung (7) sendet, wenn der erste Sensor (8) und einer der zweiten und dritten Sensoren (9, 10) jeweils einen Bediener erfassen.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102013110681.1A DE102013110681A1 (de) | 2013-09-26 | 2013-09-26 | Steuerschalter für eine Bedienung einer Maschine, insbesondere eine drahtlose, tragbare und handbetätigbare Fernbedienung für einen Kran |
| PCT/EP2014/070151 WO2015044093A1 (de) | 2013-09-26 | 2014-09-22 | Steuerschalter für eine bedienung einer maschine, insbesondere eine drahtlose, tragbare und handbetätigbare fernbedienung für einen kran |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2991925A1 EP2991925A1 (de) | 2016-03-09 |
| EP2991925B1 true EP2991925B1 (de) | 2017-03-22 |
Family
ID=51589312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14771886.0A Active EP2991925B1 (de) | 2013-09-26 | 2014-09-22 | Steuerschalter für eine bedienung einer maschine, insbesondere eine drahtlose, tragbare und handbetätigbare fernbedienung für einen kran |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9776839B2 (de) |
| EP (1) | EP2991925B1 (de) |
| CN (1) | CN203877772U (de) |
| DE (1) | DE102013110681A1 (de) |
| ES (1) | ES2627637T3 (de) |
| WO (1) | WO2015044093A1 (de) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6578797B2 (ja) * | 2015-08-06 | 2019-09-25 | オムロン株式会社 | 操作装置およびx線撮影ユニット |
| DE102016102668B4 (de) * | 2016-02-16 | 2017-09-28 | W + W Aufzugkomponenten Gmbh U. Co. Kg | Einrichtung für eine Aufzugsanlage, die eine im Aufzugsschacht anbringbare Inspektionssteuereinrichtung aufweist |
| JP6794337B2 (ja) * | 2017-11-27 | 2020-12-02 | 株式会社日立産機システム | 無線送信機用ホルダー及び巻上機 |
| USD868708S1 (en) * | 2018-02-22 | 2019-12-03 | Nbb Holding Ag | Remote control |
| CN109019333B (zh) * | 2018-07-02 | 2020-06-30 | 吴思 | 一种智能塔吊手持定位与控制终端 |
| DE102018215066A1 (de) * | 2018-09-05 | 2020-03-05 | Brendel Holding Gmbh & Co. Kg | Bedienteil für eine Fernsteuerung, umfassend einen Aktivierungssensor mit veränderbarem effektiven Sensorbereich |
| DE102019125223A1 (de) * | 2019-09-19 | 2021-03-25 | Konecranes Global Corp. | Vorrichtung zur Handbetätigung einer Maschine, vorzugsweise eines Hebezeugs oder Krans |
| TR2021017876A2 (tr) * | 2021-11-17 | 2021-12-21 | Elfatek Elektronik Makina Ve Otomasyonu Sanayi Ticaret Ltd Sirketi | Halat Salınım Emniyet Sistemi |
| USD1023981S1 (en) * | 2022-03-15 | 2024-04-23 | Stellar Industries, Inc. | Crane remote control device |
| USD1026393S1 (en) * | 2022-04-19 | 2024-05-07 | Stellar Industries, Inc. | Crane remote control device |
| USD1026045S1 (en) * | 2022-05-06 | 2024-05-07 | Stellar Industries | Crane remote control device |
| DE102022115160A1 (de) | 2022-06-17 | 2023-12-28 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Einhand-Bedieneinrichtung |
| CN116425034B (zh) * | 2023-03-09 | 2025-09-30 | 广州大学 | 一种起重设备的作业前安全隐患排除方法及装置 |
| DE102023129470A1 (de) * | 2023-10-25 | 2025-04-30 | B. Braun New Ventures GmbH | Medizinischer Joystick mit Freigabesensor, medizinisches System und computerimplementiertes Steuerverfahren |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE8215903U1 (de) * | 1982-06-01 | 1982-10-07 | Steuerungstechnik GmbH, 8000 München | Transportabler Funkfernsteuersender |
| DE19921349C2 (de) | 1999-05-10 | 2003-09-25 | Otto Martin Maschb Gmbh & Co | Verfahren und Vorrichtung zur Steuerung eines motorischen Vorschubantriebes |
| US6948398B2 (en) * | 2002-07-22 | 2005-09-27 | Deere & Company | Joystick with enabling sensors |
| DE102006012471B4 (de) * | 2006-03-18 | 2010-08-26 | Demag Cranes & Components Gmbh | Verfahren und System zur drahtlosen Übertragung von Steuerungsbefehlen für eine Steuerung eines Hebezeugs |
| DE102007055465A1 (de) * | 2007-11-13 | 2009-05-20 | Trumpf Medizin Systeme Gmbh | Fernbedienung für eine Vorrichtung zur Lagerung eines Patienten |
| US9520743B2 (en) * | 2008-03-27 | 2016-12-13 | Echostar Technologies L.L.C. | Reduction of power consumption in remote control electronics |
| WO2009130165A2 (en) * | 2008-04-25 | 2009-10-29 | Ident Technology Ag | Electrode system for proximity detection and hand-held device with electrode system |
| US8134475B2 (en) * | 2009-03-16 | 2012-03-13 | Echostar Technologies L.L.C. | Backlighting remote controls |
| DE102009051819A1 (de) | 2009-11-04 | 2010-06-02 | Daimler Ag | Sicherungssystem zum Aktivieren und Deaktivieren der Funktionsfähigkeit der Bedienelemente einer Steuerungseinrichtung eines Krans |
| DE102009057935B4 (de) | 2009-12-11 | 2015-07-09 | Ident Technology Ag | Einrichtung und Verfahren zur Detektion eines Umgreifens eines Handgeräts durch eine Hand |
| KR101275314B1 (ko) * | 2011-05-11 | 2013-06-17 | 도시바삼성스토리지테크놀러지코리아 주식회사 | 리모트 컨트롤러와, 이를 이용한 제어 방법 및 제어 시스템 |
-
2013
- 2013-09-26 DE DE102013110681.1A patent/DE102013110681A1/de not_active Withdrawn
- 2013-11-05 CN CN201320698960.0U patent/CN203877772U/zh not_active Expired - Lifetime
-
2014
- 2014-09-22 ES ES14771886.0T patent/ES2627637T3/es active Active
- 2014-09-22 EP EP14771886.0A patent/EP2991925B1/de active Active
- 2014-09-22 WO PCT/EP2014/070151 patent/WO2015044093A1/de not_active Ceased
- 2014-09-22 US US15/022,113 patent/US9776839B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN203877772U (zh) | 2014-10-15 |
| EP2991925A1 (de) | 2016-03-09 |
| US9776839B2 (en) | 2017-10-03 |
| ES2627637T3 (es) | 2017-07-28 |
| DE102013110681A1 (de) | 2015-03-26 |
| WO2015044093A1 (de) | 2015-04-02 |
| US20160236914A1 (en) | 2016-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2991925B1 (de) | Steuerschalter für eine bedienung einer maschine, insbesondere eine drahtlose, tragbare und handbetätigbare fernbedienung für einen kran | |
| EP3535637B1 (de) | Bedienvorrichtung für eine fahrzeugkomponente | |
| DE102006016737B4 (de) | Verfahren und Vorrichtung zum Konfigurieren verschiedener Betriebsmodi in einem passiven Schließsystem | |
| EP1328695B1 (de) | Vorrichtung zum einleiten eines öffnungs- und verriegelungsvorgangs eines kraftfahrzeugs | |
| DE102012203535B4 (de) | Tastenloser Fahrzeugschlüssel mit Gestikerkennung | |
| EP1920928B2 (de) | Druckmaschine mit mehreren Bedienzonen | |
| EP1673866B1 (de) | Sicherheitsschalter, insbesondere not-aus-schalter, zum sicheren abschalten eines gefahrbringenden gerätes | |
| EP2652566B1 (de) | Steuervorrichtung für eine werkzeugmaschine und verfahren zum steuern der werkzeugmaschine | |
| DE102012108004A1 (de) | Sicherheitssystem für eine Kraftfahrzeugtür eines Kraftfahrzeuges mit mindestens zwei Sensoren | |
| DE102006054163A1 (de) | Fahrzeugtür-Öffnen/Schließen-Vorrichtung | |
| DE102019131065A1 (de) | Türverriegelungssystem und Griff einer Tür für ein Fahrzeug | |
| WO2007042015A1 (de) | Anlage zur überwachung des manuellen transfers von mit identifikationsträgern versehenen gütern | |
| DE102009051819A1 (de) | Sicherungssystem zum Aktivieren und Deaktivieren der Funktionsfähigkeit der Bedienelemente einer Steuerungseinrichtung eines Krans | |
| EP3350031B1 (de) | Verfahren zum betreiben eines fahrzeugzugangssystems | |
| EP3096066B1 (de) | Maschinenbedienelement mit sicherheitsfunktionalität | |
| EP4386124B1 (de) | Verfahren und vorrichtung zum betreiben mindestens eines haushaltsgeräts und haushaltsgerät | |
| DE102018109234B4 (de) | Vorrichtung und Verfahren zur Steuerung eines Kransystems | |
| EP3629478B1 (de) | Sensorvorrichtung zur detektion einer aktivierungshandlung bei einem fahrzeug | |
| EP3183632B1 (de) | Bedienvorrichtung und mobiles bediengerät, insbesondere für ein elektronisches haushaltsgerät | |
| DE102018125176B4 (de) | Türgriffmodul mit einem NFC-Initiator | |
| AT6728U1 (de) | Handbediengerät mit einer not-aus schaltvorrichtung und verfahren zum herstellen und aufheben einer funktionalen wirkverbindung | |
| DE102016219844A1 (de) | Hupensteuerung | |
| DE102012100923A1 (de) | Schlüsselloses Zutrittskontrollsystem für ein Gebäude | |
| DE102024116735A1 (de) | Schaltungsanordnung für einen Fahrzeuggriff | |
| DE102017103741A1 (de) | Steuerung des Zugriffs auf eine Maschine, insbesondere auf eine industrielle Produktionsmaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20151204 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: TEREX MHPS IP MANAGEMENT GMBH |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| DAX | Request for extension of the european patent (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20160722 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: TEREX MHPS GMBH |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 877527 Country of ref document: AT Kind code of ref document: T Effective date: 20170415 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014003145 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20170322 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2627637 Country of ref document: ES Kind code of ref document: T3 Effective date: 20170728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170622 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170623 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170622 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170722 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170724 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014003145 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| 26N | No opposition filed |
Effective date: 20180102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502014003145 Country of ref document: DE Owner name: KONECRANES GLOBAL CORP., FI Free format text: FORMER OWNER: TEREX MHPS GMBH, 40597 DUESSELDORF, DE Ref country code: DE Ref legal event code: R082 Ref document number: 502014003145 Country of ref document: DE Representative=s name: MOSER GOETZE & PARTNER PATENTANWAELTE MBB, DE Ref country code: DE Ref legal event code: R081 Ref document number: 502014003145 Country of ref document: DE Owner name: KONECRANES GLOBAL CORPORATION, FI Free format text: FORMER OWNER: TEREX MHPS GMBH, 40597 DUESSELDORF, DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 732E Free format text: REGISTERED BETWEEN 20180531 AND 20180606 Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170922 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: PC2A Owner name: DEMAG CRANES & COMPONENTS GMBH Effective date: 20181022 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: PC2A Owner name: KONECRANES GLOBAL CORPORATION Effective date: 20181207 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170322 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 877527 Country of ref document: AT Kind code of ref document: T Effective date: 20190922 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190922 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230428 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250919 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250923 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250924 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250930 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20251020 Year of fee payment: 12 |