EP3828124B1 - Grue de levage avec système de détermination automatisée du mouflage - Google Patents
Grue de levage avec système de détermination automatisée du mouflage Download PDFInfo
- Publication number
- EP3828124B1 EP3828124B1 EP20209155.9A EP20209155A EP3828124B1 EP 3828124 B1 EP3828124 B1 EP 3828124B1 EP 20209155 A EP20209155 A EP 20209155A EP 3828124 B1 EP3828124 B1 EP 3828124B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- lifting
- reeving
- configuration
- block
- double
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D3/00—Portable or mobile lifting or hauling appliances
- B66D3/04—Pulley blocks or like devices in which force is applied to a rope, cable, or chain which passes over one or more pulleys, e.g. to obtain mechanical advantage
- B66D3/043—Block and tackle system with variable number of cable parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/16—Applications of indicating, registering, or weighing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/26—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes for use on building sites; constructed, e.g. with separable parts, to facilitate rapid assembly or dismantling, for operation at successively higher levels, for transport by road or rail
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
- B66C23/905—Devices for indicating or limiting lifting moment electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/02—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with non-adjustable and non-inclinable jibs mounted solely for slewing movements
- B66C23/022—Pivot axis common with column
Definitions
- the invention relates to a lifting crane comprising a boom and a double-reeving lifting device shaped to distribute and lift a load along the boom.
- It relates more particularly to a lifting crane in which the lifting device is reversibly configurable between two reeving configurations including a single reeving configuration with two lifting strands and a double reeving configuration with four lifting strands, and where the lifting device lifting comprising a reeving change system making it possible to change reeving between the single reeving configuration and the double reeving configuration.
- the invention finds a preferred, and non-limiting, application in the field of tower cranes.
- the document FR3061163 describes an example of a lifting crane equipped with such a lifting device reversibly configurable between a single reeving configuration and a double reeving configuration in accordance with the preamble of claim 1.
- a lifting crane comprises a control/command unit controlling all crane movements in order to guarantee correct use within authorized limits of the crane, and in particular guarantee the stability of the crane by constantly monitoring that the load suspended on the lifting device at the span measured on the boom is less than a maximum load allowed by a predefined load curve.
- this suspended load control function is carried out by a moment bar calculation which makes it possible to directly measure an elastic deformation of the arrow under the suspended load moment, with numerous disadvantages including the cost of such control/command units and the complexity of implementation.
- control/command unit it is necessary for the control/command unit to know the number of lifting strands, in other words the hauling configuration between the single hauling configuration and the double hauling configuration.
- the hauling configuration is known in a declarative mode, that is to say that it is the crane pilot who declares the current hauling configuration on an interface. Consequently, the stability of the crane, and therefore compliance with safety conditions, will depend on the correct declaration of the hauling configuration by the pilot; it being noted that poor consideration of the number of strands involved can lead to accepting an overload of a factor of 2 compared to the maximum authorized load, with serious consequences such as, for example, the crane tipping over.
- the invention proposes to eliminate this declarative mode of the reeving configuration, and thereby eliminate the aforementioned disadvantages associated with its implementation, including mainly the risks of false declarations, erroneous declarations or late declarations.
- the invention relates to a lifting crane according to claim 1.
- the invention is based on an automated mode of determining the hauling configuration, rather than on a declarative mode, which makes the recognition of the hauling configuration more reliable and thus makes it possible to automatically change the load curve. (adaptation of the load curve according to the number of lifting strands) without the decision of the crane operator, and ensuring that you always have the correct load curve, particularly during the transition phases, during the change of hauling.
- the invention also makes it possible to make the recognition of the hauling configuration more reliable without using a moment bar calculation which, in addition to being expensive, is complicated to implement.
- the automated determination of the reeving configuration is based on the detection of absence/presence of the secondary reeving at a reference location, which has the advantage of having reliable detection and thus determination of the configuration equally reliable hauling system.
- the automated hauling determination system comprises a storage module connected to the control/command unit to store at least one last hauling configuration determined by the control/command unit, and the control unit /command is configured to automatically determine the reeving configuration also based on said last reeving configuration stored in the storage module.
- the control/command unit can determine the new reeving configuration and check whether this determination is consistent with the last reeving configuration stored in the memory. Also, the control/command unit can check whether or not a reeving change is taking place correctly, so as to be able to deduce the new reeving configuration in a safe manner and, once the new reeving configuration has been determined, this is stored in the storage module until the next reeving change.
- the system for detecting the presence of the secondary muffle is configured to detect the presence/absence of the secondary muffle inside the muffle housing occupied by the secondary muffle in the single reeving configuration and/or at the same time. location above the main block occupied by the secondary block in the double block configuration.
- this storage location is at the base of the arrow.
- the invention makes it possible to secure reeving changes, and therefore avoid erroneous operations.
- the lifting crane comprises a lifting winch provided with a lifting drum cooperating with the lifting cable to move the load up and down, said lifting winch being equipped with its own unwinding sensor measuring an unwound length of the lifting cable, where the control unit is configured to compare the unwound lengths of the hoisting cable at the start of a first automated sequence and at the start of a second automated sequence which follows or precedes said first automated sequence.
- control/command unit is designed to automatically determine the reeving configuration also depending on the comparison between the unwound lengths of the lifting cable at the start of a first automated sequence and at the start of a second automated sequence which follows or precedes said first automated sequence.
- a load sensor coupled to a lifting strand of the lifting cable for measuring a lifting tension on said lifting strand
- the control unit is connected to the load sensor and is configured to calculate a value of the load as a function of said lifting tension on said lifting strand and of the hauling configuration determined automatically by said control/command unit.
- the invention indeed finds an advantageous application for calculating a value of the load suspended from the lifting strands, in a reliable manner and without a declarative mode, thus offering a reliable solution making it possible to overcome human error and thus to improve the level of security.
- control/command unit is configured to compare the value of the load with a maximum authorized load.
- the configuration of the lifting device is determined automatically based also on the comparison between the unwound lengths of the lifting cable at the start of a first automated sequence and at the start of a second automated sequence which follows or precedes said first automated sequence.
- a lifting crane 1 of the tower crane type, comprises a distributor boom 2 mounted on a tower 3 (also called mast) at the foot 20 of the boom 2.
- a tower 3 also called mast
- the foot 20 of arrow 2 is rotatably mounted on tower 3 along a vertical axis.
- Arrow 2 can be extended to the other side of tower 3 by a counter-jib 30, generally equipped with ballast.
- the lifting crane 1 further comprises a lifting device 4 with double reeving designed to distribute a load (not illustrated) along the boom 2, this lifting device 4 circulating on a raceway formed on the boom 2, between the foot 20 and the tip 21 of the arrow 2, also called the free end of the arrow 2.
- This lifting device 4 comprises a distributor carriage 5 which comprises a suspended structure 50 on the raceway by primary front and rear rolling members formed of rollers or wheels rolling on the raceway.
- This suspended structure 50 supports pulleys which guide a lifting cable 40.
- the suspended structure 50 is connected to a distribution system 55 capable of moving the distributor carriage 5 along the raceway in a forward direction (in other words in the direction of the tip 21 of arrow 2, towards the right in the figures) and a reverse direction (in other words towards the foot 20 of arrow 2, towards the left in the figures).
- this distribution system 55 comprises a motor 56 driving a distribution winch 57 coupled to a distribution cable 58 having strands fixed on either side of the distributor carriage 5 and which circulates up to the tip 21 of the arrow 2.
- the distributor carriage 5 further comprises a main block 51 suspended from the suspended structure 50 by the lifting cable 40.
- This main block 51 supports a lifting member 52 in the lower part; this lifting member 52 being intended for hooking the load and being able to take the form of a hook articulated on the main block 51.
- the lifting device 4 comprises a reeving change system making it possible to reversibly carry out a reeving change between the single reeving configuration and the double reeving configuration, and vice versa.
- This reeving change system includes a remaining carriage 6 which can be moved on the raceway.
- the remaining carriage 6 comprises a frame suspended 60 on the raceway by secondary front and rear rolling members formed of rollers or wheels rolling on the raceway.
- the suspended frame 40 is open at the front, allowing entry/exit of the distributor cart 3.
- This reeving change system further comprises a secondary reeving block 61 supported by the suspended frame 60 of the remaining carriage 6 in double reeving configuration.
- the locking/unlocking mechanism comprises support members integral with the suspended frame 60 of the remaining carriage 6 and on which the secondary block 61 is suspended at a location above the main block in the double block configuration, and the main block 51 comprises the block housing 55 arranged to at least partially accommodate the secondary block 61 in the single block configuration.
- the lifting device 4 is arranged to move from the single reeving configuration to the double reeving configuration, and vice versa, by moving the distributor carriage 5 with its main reeving block 51, and to do this the reeving change system and more specifically its locking/unlocking mechanism are shaped to move from the single hauling configuration to the double hauling configuration, and vice versa, by acting on the distribution system (to move the distributor trolley 5) and on the lifting cable 40.
- the lifting crane 1 comprises a lifting system 45 provided with a motor 46 driving a lifting winch 47 provided with a lifting drum coupled to the lifting cable 40 on which the main block 51 is suspended, and which circulates up to 'at point 21 of arrow 2.
- the lifting crane 1 further comprises an automated reeving determination system 7 designed to automatically determine the reeving configuration between the single reeving configuration and the double reeving configuration.
- This presence detection system 8 may include a first means for detecting the presence/absence of the secondary muffle 61 inside the muffle housing 55 occupied by the secondary muffle 61 in the single muffle configuration.
- This first means can for example comprise a contact sensor, a mechanical sensor, an electrical sensor, an optical sensor, etc. placed for example in front of or inside the muffle housing 55.
- This presence detection system 8 may include a second means for detecting the presence/absence of the secondary muffle 61 at the location above the main muffle 51 occupied by the secondary muffle 61 in the double muffle configuration, and in particular the presence/absence of the secondary block 61 suspended on the support members provided on the remaining carriage 6.
- This second means can for example comprise a contact sensor, a mechanical sensor, an electrical sensor, an optical sensor, etc. placed for example opposite or on the support members.
- This presence detection system 8 may include a third means for detecting the presence/absence of the remaining cart 6 at the storage location (under the foot 20 of the arrow 2 in the illustrated embodiment), to the extent that the presence/absence of the remaining carriage 6 at the storage location is correlated with the location of the secondary block 61 and the blockage configuration.
- the lifting device 4 is in simple reeving configuration, and conversely if the remaining carriage 6 is absent from the storage location then the lifting device 4 is in double reeving configuration.
- This presence detection system 8 may comprise all or part of the first means, the second means and the third means described above.
- the presence detection system 8 comprises the third means, visible on the Figure 3 , which comprises a proximity sensor 80 associated with a stop 81 mounted sliding in translation on a fixed structural element 22 of the lifting crane 1 placed at the level of the foot 20 of the boom 2, so that the stop 81 is located in face of the remaining carriage 6 when the latter is in the storage location, under foot 20 of arrow 2.
- This stop 81 comprises a rod 82 extended by an enlarged head 83.
- the rod 82 is slidably mounted on the structural element 22 and, as such, the rod 82 passes through this structural element 22 in an orifice or bearing.
- the rod 82 has a free front end provided with an abutment surface 84 provided so that the remaining carriage 6 abuts against said abutment surface 84.
- the remaining carriage 6 can present, at the rear, a rear stopper 63 suitable for bearing on the stop surface 84.
- This abutment surface 84 is widened relative to the rod 82, and is in particular in the form of a disc with a diameter greater than the diameter of the rod 82 if the latter is cylindrical.
- the enlarged head 83 has a flat detection surface 85 inclined relative to a sliding direction of the stop 81 on the structural element 22.
- an elastic return member 86 interposed between the structural element 22 and the abutment surface 84, where this return member 86 is in the form of a helical compression spring mounted around the rod 82.
- the proximity sensor 80 is for its part fixedly mounted on the arrow 2 and is arranged facing the detection surface 85 of the enlarged head 83 of the stop 81, where the proximity sensor 80 is configured to detect and measure the distance between said proximity sensor 80 and said detection surface 85.
- This proximity sensor 80 can for example be an inductive sensor or a light sensor (infrared sensor, etc.).
- the stop 81 In the detection position, the stop 81 has slid (backwards), compared to the rest position, which contributes to a modification of the distance between the proximity sensor 80 and the detection surface 85, and also to compression of the return member 86 between the structural element 22 and the abutment surface 84. It should be noted that the detection surface 85 is inclined in the direction of a reduction in the distance between the proximity sensor 80 and the detection surface 85 when the stop 81 has slid (backwards) from its rest position towards the detection position.
- control/command unit 9 makes it possible to automatically determine the hauling configuration based on the detection made by the presence detection system 8.
- the automated reeving determination system 7 comprises a storage module 90 (or memory) connected to the control/command unit 9 to store at least one last reeving configuration determined by the control/command unit 9.
- the last hauling configuration is stored in this storage module 90, so that when a hauling change is made, the control/command unit 9 is configured to automatically determine the reeving configuration also based on this last reeving configuration stored in the storage module.
- the new hauling configuration Once the new hauling configuration has been determined, based at least on the detection made by the presence detection system 8 and the last hauling configuration stored, it is this new hauling configuration which is stored in the module. storage 90 and which therefore becomes the last hauling configuration. In other words, the reeving configuration is updated in the storage module 90 each time the reeving changes.
- the control/command unit 9 can also be connected to an unwinding sensor provided on the lifting winch 47 and capable of measuring an unwound length of the lifting cable 40.
- the control/command unit 9 can compare the unwound lengths of the lifting cable 40 at the start of a first automated sequence and at the start of a second automated sequence which follows or precedes this first automated sequence, and the control/command unit 9 can thus automatically determine the hauling configuration also depending on this comparison between the unwound lengths of the lifting cable 40.
- control/command unit 9 establishes the presence of an error and automatically restarts the current sequence and/or emits an alarm.
- control/command unit 9 confirms that the reeving configuration is the double reeving configuration if no error has been detected, and stores this double reeving configuration in the storage module 90.
- control/command unit 9 confirms that the reeving configuration is the single reeving configuration if no error has been detected, and stores this single reeving configuration in the storage module 90.
- the lifting crane 1 may also include a load sensor 91 coupled to a lifting strand of the lifting cable 90 to measure a lifting tension on this lifting strand.
- control/command unit 9 is connected to this load sensor 91 and is configured to calculate a value of the load as a function of the lifting tension measured on this lifting strand and the determined hauling configuration automatically by the control/command unit 9, to the extent that a single reeving configuration corresponds to a distribution of the load over two lifting strands, and a double reeving configuration corresponds to a distribution of the load over four lifting strands.
- control/command unit 9 can compare the value of the load with a maximum authorized load, and consequently the control/command unit 9 can act on the movement of the distributor cart 5 and the movement of the lifting cable 40 in the event of exceeding the maximum authorized load, and can in particular stop any movement of the load in the event of exceeding the maximum authorized load.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Control And Safety Of Cranes (AREA)
- Combined Means For Separation Of Solids (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Jib Cranes (AREA)
Description
- L'invention se rapporte à une grue de levage comprenant une flèche et un dispositif de levage à double mouflage conformé pour distribuer et lever une charge le long de la flèche.
- Elle se rapporte plus particulièrement à une grue de levage dans laquelle le dispositif de levage est configurable réversiblement entre deux configurations de mouflage incluant une configuration simple mouflage à deux brins de levage et une configuration double mouflage à quatre brins de levage, et où le dispositif de levage comprenant un système de changement de mouflage permettant de réaliser un changement de mouflage entre la configuration simple mouflage et la configuration double mouflage.
- L'invention trouve une application favorite, et non limitative, dans le domaine des grues à tour.
- Le document
FR3061163 - De manière connue, une grue de levage comporte une unité de contrôle/commande contrôlent l'ensemble des mouvements de grue afin de garantir une utilisation correcte dans des limites autorisées de la grue, et en particulier garantir la stabilité de la grue en contrôlant en permanence que la charge suspendue sur le dispositif de levage à la portée mesurée sur la flèche est inférieure à une charge maximale autorisée par une courbe de charge prédéfinie.
- De manière connue avec des unités de contrôle/commande électromécaniques, cette fonction de contrôle de la charge suspendue est réalisée par un calcul de barre de moment qui permet de mesurer directement une déformation élastique de la flèche sous le moment de charge suspendue, avec de nombreux inconvénients dont le coût de telles unités de contrôle/commande et la complexité de mise en oeuvre.
- L'état de la technique peut également être illustré par les enseignements du document
CN 109 879 181 qui décrit un exemple d'une grue de levage munie d'un dispositif de levage configurable réversiblement entre une configuration simple mouflage et une configuration double mouflage. - Il est également connu de calculer la charge suspendue à partir d'une tension de levage réelle mesurée sur au moins un brin de levage (brin du câble de levage supportant en partie la charge), puis cette tension de levage est multipliée par le nombre de brins de levage en action, qui est de deux en configuration simple mouflage et de quatre en configuration double mouflage.
- Aussi, il est nécessaire que l'unité de contrôle/commande ait connaissance du nombre de brins de levage, autrement dit de la configuration de mouflage entre la configuration simple mouflage et la configuration double mouflage.
- Actuellement, la configuration de mouflage est connue sur un mode déclaratif, c'est-à-dire que c'est le pilote de la grue qui déclare sur une interface la configuration de mouflage en cours. Par conséquent, la stabilité de la grue, et donc le respect des conditions de sécurité, vont dépendre de la bonne déclaration de la configuration de mouflage par le pilote ; étant noté qu'une mauvaise prise en compte du nombre de brins en jeu peut conduire à accepter une surcharge d'un facteur 2 comparativement à la charge maximale autorisée, avec de graves conséquences comme par exemple un basculement de la grue.
- Ainsi, l'invention propose de supprimer ce mode déclaratif de la configuration de mouflage, et par la même supprimer les inconvénients précités associés à sa mise en oeuvre, dont principalement les risques de fausses déclarations, déclarations erronées ou déclarations tardives.
- A cet effet, l'invention se rapporte à une grue de levage conforme à la revendication 1.
- Ainsi, l'invention s'appuie sur un mode automatisé de la détermination de la configuration de mouflage, plutôt que sur un mode déclaratif, ce qui permet de fiabiliser la reconnaissance de la configuration de mouflage et ainsi permet de changer automatiquement la courbe de charge (adaptation de la courbe de charge en fonction du nombre de brins de levage) sans décision du grutier, et en s'assurant de toujours avoir la bonne courbe de charge en particulier durant les phases de transition, pendant le changement de mouflage.
- L'invention permet par ailleurs de fiabiliser la reconnaissance de la configuration de mouflage sans utiliser un calcul de barre de moment qui, en plus d'être coûteux, est compliqué à mettre en oeuvre.
- Selon l'invention, le dispositif de levage comprend un chariot distributeur comprenant une structure suspendue sur la flèche et reliée à un système de distribution propre à déplacer le chariot distributeur le long de la flèche selon une direction avant et une direction arrière opposées, et une moufle principale suspendue à ladite structure suspendue par un câble de levage ;
- le système de changement de mouflage comprend une moufle secondaire et un mécanisme de verrouillage/déverrouillage coopérant avec la moufle principale et la moufle secondaire pour passer de la configuration simple mouflage à la configuration double mouflage ou inversement ; et
- le système de détermination automatisée du mouflage comprend au moins :
- un système de détection de présence de la moufle secondaire propre à détecter une présence/absence de la moufle secondaire à un emplacement de référence prédéterminé occupé par ladite moufle secondaire dans l'une ou l'autre des configurations de mouflage, et
- une unité de contrôle/commande raccordée au système de détection de présence de la moufle secondaire et conformée pour déterminer automatiquement la configuration de mouflage en fonction de la détection d'absence/présence de la moufle secondaire à l'emplacement de référence.
- Ainsi, la détermination automatisée de la configuration de mouflage s'appuie sur la détection d'absence/présence de la moufle secondaire à un emplacement de référence, ce qui a l'avantage d'avoir une détection fiable et ainsi une détermination de la configuration de mouflage tout autant fiable.
- Selon une possibilité, le système de détermination automatisée du mouflage comprend un module de stockage relié à l'unité de contrôle/commande pour stocker au moins une dernière configuration de mouflage déterminée par l'unité de contrôle/commande, et l'unité de contrôle/commande est conformée pour déterminer automatiquement la configuration de mouflage également en fonction de ladite dernière configuration de mouflage stockée dans le module de stockage.
- Ainsi, lors d'un changement de mouflage, l'unité de contrôle/commande peut déterminer la nouvelle configuration de mouflage et vérifier si cette détermination est en cohérence avec la dernière configuration de mouflage stockée dans la mémoire. Aussi, l'unité de contrôle/commande peut vérifier le bon déroulement ou non d'un changement de mouflage, de manière à être en mesure de déduire la nouvelle configuration de mouflage de manière sûre et, une fois la nouvelle configuration de mouflage déterminée, celle-ci est mémorisée dans le module de stockage jusqu'au prochain changement de mouflage.
- Selon une autre possibilité :
- dans la configuration simple mouflage, le mécanisme de verrouillage/déverrouillage déverrouille la moufle secondaire qui reste positionnée à l'intérieur d'un logement de moufle prévu sur la moufle principale de sorte que le câble de levage coopère avec la moufle principale pour un levage à deux brins de levage, et
- dans la configuration double mouflage, le mécanisme de verrouillage/déverrouillage verrouille la moufle secondaire sur le chariot distributeur à un emplacement au-dessus de la moufle principale de sorte que le câble de levage coopère à la fois avec la moufle principale et la moufle secondaire pour un levage à quatre brins de levage.
- Dans une première réalisation, le système de détection de présence de la moufle secondaire est configuré pour détecter la présence/absence de la moufle secondaire à l'intérieur du logement de moufle occupé par la moufle secondaire dans la configuration simple mouflage et/ou à l'emplacement au-dessus de la moufle principale occupé par la moufle secondaire dans la configuration double mouflage.
- Ainsi dans cette première réalisation, le système de détection de présence de la moufle secondaire met en oeuvre une détection directe de la présence/absence de la moufle secondaire à un emplacement de référence ; cet emplacement de référence correspondant :
- à l'intérieur du logement de moufle (si la moufle secondaire est à l'intérieur du logement de moufle alors le dispositif de levage est en configuration simple mouflage) ;
- à l'emplacement au-dessus de la moufle principale (si la moufle secondaire est suspendue à l'emplacement au-dessus de la moufle principale alors le dispositif de levage est en configuration double mouflage).
- Dans une seconde réalisation, le système de changement de mouflage comprend un chariot restant comprenant une armature suspendue sur la flèche et supportant la moufle secondaire, où :
- dans la configuration double mouflage, le mécanisme de verrouillage/déverrouillage verrouille ensemble le chariot distributeur et le chariot restant qui sont assemblées et déplaçables en association le long de la flèche, et la moufle secondaire est suspendue sur le chariot restant à l'emplacement au-dessus de la moufle principale ; et
- dans la configuration simple mouflage, le mécanisme de verrouillage/déverrouillage déverrouille le chariot restant, de sorte que le chariot distributeur et le chariot restant sont désassemblés, la moufle secondaire est logée à l'intérieur du logement de moufle prévu sur la moufle principale et le chariot distributeur est déplaçable seul tandis que le chariot restant est positionné statiquement avec la moufle secondaire à un emplacement de stockage ;
- Ainsi dans cette seconde réalisation, le système de détection de présence de la moufle secondaire met en oeuvre une détection indirecte de la présence/absence de la moufle secondaire à un emplacement de référence. En effet, c'est le chariot restant qui est détecté comme étant présent/absent à cet emplacement de stockage, autrement dit :
- si le chariot restant est présent à l'emplacement de stockage, alors nécessairement la moufle secondaire est à l'intérieur du logement de moufle et le dispositif de levage est en configuration simple mouflage ;
- si le chariot restant est absent de l'emplacement de stockage, alors nécessairement la moufle secondaire est suspendue à l'emplacement au-dessus de la moufle principale et le dispositif de levage est en configuration double mouflage.
- Selon une variante, cet emplacement de stockage se trouve en pied de flèche.
- Selon l'invention, le système de changement de mouflage fait passer le dispositif de levage de la configuration simple mouflage vers la configuration double mouflage, et inversement, par déplacement du chariot distributeur avec sa moufle principale, et l'unité de contrôle/commande est raccordée au système de distribution pour piloter le déplacement du chariot distributeur selon :
- une première séquence automatisée faisant passer le dispositif de levage de la configuration simple mouflage vers la configuration double mouflage ; et inversement
- une seconde séquence automatisée faisant passer le dispositif de levage de la configuration double mouflage vers la configuration simple mouflage ;
- Grâce à la détection automatisée de la configuration de mouflage, il est donc désormais avantageux de piloter de manière automatisée les changements de mouflage, de manière intégrale ou non du début jusqu'à la fin ; tout comme il est envisageable que ce pilotage relève d'une assistance au pilotage, par exemple en contrôlant ou en limitant les vitesses et/ou les accélérations et/ou les freinages et/ou les arrêts. Avantageusement, l'unité de contrôle/commande est conformée pour autoriser :
- la première séquence automatisée au moins à la condition où l'unité de contrôle/commande a déterminé que le dispositif de levage est en configuration simple mouflage ;
- la seconde séquence automatisée au moins à la condition où l'unité de contrôle/commande a déterminé que le dispositif de levage est en configuration double mouflage.
- Ainsi, l'invention permet de sécuriser les changements de mouflage, et donc éviter des opérations erronées.
- Selon l'invention, la grue de levage comprend un treuil de levage muni d'un tambour de levage coopérant avec le câble de levage pour déplacer la charge en montée et en descente, ledit treuil de levage étant équipé d'un capteur de déroulement propre à mesurer une longueur déroulée du câble de levage, où l'unité de contrôle/commande est conformée pour comparer les longueurs déroulées du câble de levage au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée.
- Selon l'invention, l'unité de contrôle/commande est conformée pour déterminer automatiquement la configuration de mouflage en fonction également de la comparaison entre les longueurs déroulées du câble de levage au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée.
- Ainsi, cette comparaison permet de fiabiliser encore la détermination de la configuration de mouflage.
- Dans une réalisation avantageuse, un capteur de charge couplé à un brin de levage du câble de levage pour mesurer une tension de levage sur ledit brin de levage, où l'unité de contrôle/commande est raccordée au capteur de charge et est conformée pour calculer une valeur de la charge en fonction de ladite tension de levage sur ledit brin de levage et de la configuration de mouflage déterminée automatiquement par ladite unité de contrôle/commande.
- L'invention trouve en effet une application avantageuse pour calculer une valeur de la charge suspendue aux brins de levage, de manière fiable et sans mode déclaratif, offrant ainsi une solution fiable permettant de s'affranchir de l'erreur humaine et ainsi d'améliorer le niveau de sécurité.
- Selon une autre possibilité, l'unité de contrôle/commande est conformée pour comparer la valeur de la charge avec une charge maximale autorisée.
- L'invention se rapporte également à un procédé de pilotage d'une grue de levage selon l'invention, comme décrit ci-dessus, comprenant les étapes de :
- réaliser un changement de mouflage entre la configuration simple mouflage et la configuration double mouflage, ou inversement ;
- déterminer automatiquement la configuration de mouflage entre la configuration simple mouflage et la configuration double mouflage.
- Selon l'invention, le procédé de pilotage comprend les étapes de :
- détecter une présence/absence de la moufle secondaire à un emplacement de référence prédéterminé occupé par ladite moufle secondaire dans l'une ou l'autre des configurations de mouflage ;
- déterminer automatiquement la configuration de mouflage en fonction de la détection d'absence/présence de la moufle secondaire à l'emplacement de référence. Avantageusement, le procédé de pilotage comprend une étape de stockage d'au moins une dernière configuration de mouflage déterminée automatiquement, et dans lequel la configuration du dispositif de levage est déterminée automatiquement en fonction également de ladite dernière configuration de mouflage stockée.
- Selon l'invention, le procédé de pilotage comprend une étape de piloter le déplacement du chariot distributeur selon :
- une première séquence automatisée faisant passer le dispositif de levage de la configuration simple mouflage vers la configuration double mouflage ; et inversement
- une seconde séquence automatisée faisant passer le dispositif de levage de la configuration double mouflage vers la configuration simple mouflage ;
- Avantageusement, le procédé de pilotage comprend l'étape d'autoriser :
- la première séquence automatisée au moins à la condition où il est déterminé automatiquement que le dispositif de levage est en configuration simple mouflage ;
- la seconde séquence automatisée au moins à la condition où il est déterminé automatiquement que le dispositif de levage est en configuration double mouflage.
- Selon l'invention, le procédé de pilotage comprend les étapes de :
- mesurer une longueur déroulée du câble de levage, ledit câble de levage coopérant avec un tambour de levage d'un treuil de levage pour déplacer la charge en montée et en descente,
- comparer les longueurs déroulées du câble de levage au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée.
- Selon l'invention, la configuration du dispositif de levage est déterminée automatiquement en fonction également de la comparaison entre les longueurs déroulées du câble de levage au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée.
- Selon une autre possibilité, le procédé de pilotage comprend les étapes de :
- mesurer une tension de levage sur un brin du câble de levage ;
- calculer une valeur de la charge en fonction de ladite tension de levage sur ledit brin du câble de levage et de la configuration de mouflage déterminée automatiquement. Avantageusement, le procédé de pilotage comprend l'étape de comparer la valeur de la charge avec une charge maximale autorisée.
- D'autres caractéristiques et avantages de la présente invention apparaîtront à la lecture de la description détaillée ci-après, d'un exemple de mise en oeuvre non limitatif, faite en référence aux figures annexées dans lesquelles :
- [
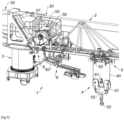
Fig. 1 ] est une vue en perspective d'une partie d'une grue de levage conforme à l'invention, comprenant un dispositif de levage illustré en configuration double mouflage, ce dispositif de levage comprenant un chariot distributeur et un chariot restant assemblés, et un câble de levage coopérant avec une moufle principale et avec une moufle secondaire suspendue au-dessus de la moufle principale ; - [
Fig. 2 ] est une vue en perspective d'une partie de la grue de levage de laFigure 1 , avec le dispositif de levage en configuration double mouflage et en pied de flèche ; - [
Fig. 3 ] est une vue zoomée de la zone III de laFigure 2 qui est positionnée sur un système de détection de présence de la moufle secondaire ; - [
Fig. 4 ] est une vue d'une partie de la grue de levage de laFigure 1 , avec le dispositif de levage en configuration simple mouflage, où le chariot distributeur et le chariot restant sont désassemblés, la moufle secondaire est logée dans un logement de moufle de la moufle principale, et le chariot restant étant stationné au pied de la flèche ; - [
Fig. 5 ] est une vue schématique d'une grue de levage conforme à l'invention en configuration simple mouflage ; et - [
Fig. 6 ] est une vue schématique d'une grue de levage similaire à celle de laFigure 5 mais en configuration double mouflage. - En référence aux Figures, une grue de levage 1 selon l'invention, de type grue à tour, comprend une flèche 2 distributrice montée sur une tour 3 (aussi appelée mât) au pied 20 de la flèche 2. De manière classique, le pied 20 de la flèche 2 est montée rotative sur la tour 3 selon un axe vertical. La flèche 2 peut être prolongée de l'autre côté de la tour 3 par une contre-flèche 30, généralement muni de lests.
- La grue de levage 1 comporte en outre un dispositif de levage 4 à double mouflage conformé pour distribuer une charge (non illustrée) le long de la flèche 2, ce dispositif de levage 4 circulant sur un chemin de roulement formé sur la flèche 2, entre le pied 20 et la pointe 21 de la flèche 2, aussi appelée extrémité libre de la flèche 2.
- Ce dispositif de levage 4 comprend un chariot distributeur 5 qui comporte une structure suspendue 50 sur le chemin de roulement par des organes primaires de roulement avant et arrière formés de galets ou de roues roulant sur le chemin de roulement. Cette structure suspendue 50 supporte des poulies qui assurent le guidage d'un câble de levage 40.
- La structure suspendue 50 est reliée à un système de distribution 55 propre à déplacer le chariot distributeur 5 le long du chemin de roulement selon une direction avant (autrement dit en direction de la pointe 21 de la flèche 2, vers la droite sur les figures) et une direction arrière (autrement dit en direction du pied 20 de la flèche 2, vers la gauche sur les figures) opposées.
- Comme schématisé aux
Figures 4 ,5 et6 , ce système de distribution 55 comprend un moteur 56 entraînant un treuil de distribution 57 accouplé à un câble de distribution 58 ayant des brins fixés de part et d'autre du chariot distributeur 5 et qui circule jusqu'à la pointe 21 de la flèche 2. - Le chariot distributeur 5 comprend en outre une moufle principale 51 suspendue à la structure suspendue 50 par le câble de levage 40. Cette moufle principale 51 supporte un organe de levage 52 en partie basse ; cet organe de levage 52 étant prévu pour un accrochage de la charge et pouvant se présenter sous la forme d'un crochet articulé sur la moufle principale 51.
- Ce dispositif de levage 4 est configurable réversiblement entre deux configurations de mouflage incluant :
- comme illustré aux
Figures 4 et5 , une configuration simple mouflage à deux brins de levage du câble de levage 40 ; et - comme illustré aux
Figures 1 ,2 et6 , une configuration double mouflage à quatre brins de levage du câble de levage 40. - Le dispositif de levage 4 comprend un système de changement de mouflage permettant de réaliser réversiblement un changement de mouflage entre la configuration simple mouflage et la configuration double mouflage, et inversement.
- Ce système de changement de mouflage comprend un chariot restant 6 qui est déplaçable sur le chemin de roulement. Le chariot restant 6 comprend une armature suspendue 60 sur le chemin de roulement par des organes secondaires de roulement avant et arrière formés de galets ou de roues roulant sur le chemin de roulement. L'armature suspendue 40 est ouverte sur l'avant, autorisant une entrée/sortie du chariot distributeur 3.
- Ce système de changement de mouflage comprend en outre une moufle secondaire 61 supportée par l'armature suspendue 60 du chariot restant 6 en configuration double mouflage.
- Ce système de changement de mouflage comprend également un mécanisme de verrouillage/déverrouillage coopérant avec la moufle principale 51 et la moufle secondaire 61 pour passer de la configuration simple mouflage à la configuration double mouflage ou inversement, de sorte que :
- dans la configuration double mouflage illustrée aux
Figures 1 ,2 et6 , le mécanisme de verrouillage/déverrouillage verrouille ensemble le chariot distributeur 5 et le chariot restant 6 qui sont assemblées et déplaçables en association le long de la flèche 2, et ainsi le mécanisme de verrouillage/déverrouillage verrouille la moufle secondaire 51 sur le chariot distributeur 5 qui est alors déplaçable avec la moufle principale 51 et avec la moufle secondaire 61 qui est suspendue au-dessus de la moufle principale 51, de sorte que le câble de levage 40 coopère à la fois avec la moufle principale 51 et la moufle secondaire 61 pour un levage à quatre brins de levage ; et - dans la configuration simple mouflage illustrée aux
Figures 4 et5 , le mécanisme de verrouillage/déverrouillage déverrouille le chariot restant 6 vis-à-vis du chariot distributeur 5, de sorte que le chariot distributeur 5 et le chariot restant 6 sont désassemblés et le chariot distributeur 5 est déplaçable seul tandis que le chariot restant 5 est positionné statiquement à un emplacement de stockage stationnaire sous la flèche 2, et plus précisément sous le pied 20 de la flèche 2, et ainsi le mécanisme de verrouillage/déverrouillage déverrouille la moufle secondaire 51 qui reste positionnée à l'intérieur d'un logement de moufle 55 prévu sur la moufle principale 51, de sorte que le câble de levage 40 coopère avec la moufle principale 51 pour un levage à deux brins de levage. - Dans le mode de réalisation illustré sur les
Figures 1 à 4 , le mécanisme de verrouillage/déverrouillage comprend des organes de support solidaires de l'armature suspendue 60 du chariot restant 6 et sur lesquels la moufle secondaire 61 est suspendue à un emplacement au-dessus de la moufle principale dans la configuration double mouflage, et la moufle principale 51 comprend le logement de moufle 55 agencé pour loger au moins partiellement la moufle secondaire 61 dans la configuration simple mouflage. - Par ailleurs, le dispositif de levage 4 est agencée pour passer de la configuration simple mouflage vers la configuration double mouflage, et inversement, par déplacement du chariot distributeur 5 avec sa moufle principale 51, et pour ce faire le système de changement de mouflage et plus spécifiquement son mécanisme de verrouillage/déverrouillage sont conformés pour passer de la configuration simple mouflage vers la configuration double mouflage, et inversement, en agissant sur le système de distribution (pour déplacer le chariot distributeur 5) et sur le câble de levage 40.
- Comme schématisé aux
Figures 5 et6 , la grue de levage 1 comprend un système de levage 45 pourvu d'un moteur 46 entraînant un treuil de levage 47 muni d'un tambour de levage accouplé au câble de levage 40 sur lequel est suspendue la moufle principale 51, et qui circule jusqu'à la pointe 21 de la flèche 2. - Ce type de dispositif de levage 4 est décrit de manière complète et détaillée dans les demandes de brevet français n°
FR 3 061 163 FR 3 061 164 - Le dispositif de levage 4 passe de la configuration double mouflage vers la configuration simple mouflage comme suit :
- dans la configuration double mouflage, la structure suspendue 50 du chariot distributeur 5 est disposée au moins partiellement à l'intérieur de l'armature suspendue 60 du chariot restant 6, et la moufle secondaire 61 est portée par les organes de support de l'armature suspendue 60 du chariot restant 6, de sorte que la moufle secondaire 61 est verrouillé sur le chariot distributeur 5 à un emplacement au-dessus de la moufle principale 51 ;
- la moufle principale 51 est remontée jusqu'à ce que la moufle secondaire 61 soit décrochée des organes de support après avoir été poussée vers le haut par la moufle principale 51, et jusqu'à ce que la moufle secondaire 61 soit logée au moins partiellement à l'intérieur du logement de moufle 55 de la moufle principale 51 ;
- le chariot distributeur 5 est déplacé en translation selon la direction avant, le chariot restant 6 n'étant pas déplacé en translation et restant à l'emplacement de stockage prédéfini sous la flèche 2, et ce chariot restant 6 ayant son armature suspendue 60 ouverte sur l'avant pour laisser un libre passage au câble de levage 40 qui suit le chariot distributeur 5 ; et
- la moufle principale 51 est descendue et le câble de levage 40 coopère avec la moufle principale 51 pour un travail en simple mouflage, la moufle secondaire 61 étant logée au moins partiellement à l'intérieur du logement de moufle 55 de la moufle principale 51.
- Le dispositif de levage 4 passe de la configuration simple mouflage vers la configuration double mouflage comme suit :
- dans la configuration simple mouflage, la moufle secondaire 61 est logée au moins partiellement à l'intérieur du logement de moufle 55 de la moufle principale 51 ;
- la moufle principale 51 est remontée jusqu'à établir un contact avec l'armature suspendue 60 du chariot restant 6 ;
- le chariot distributeur 5 est déplacé en translation selon la direction arrière ;
- la moufle principale 51 est descendue jusqu'à ce que la moufle secondaire 61 se raccroche aux organes de support, autorisant la moufle principale 51 à descendre sans que la moufle secondaire 61 ne soit logée à l'intérieur du logement de moufle 55 de la moufle principale 51.
- En référence aux
Figures 5 et6 , et selon l'invention, la grue de levage 1 comprend en outre un système de détermination automatisée du mouflage 7 conformé pour déterminer automatiquement la configuration de mouflage entre la configuration simple mouflage et la configuration double mouflage. - Ce système de détermination automatisée du mouflage 7 comprend au moins :
- un système de détection de présence 8 de la moufle secondaire 61 propre à détecter une présence/absence de la moufle secondaire 61 à un emplacement de référence prédéterminé occupé par la moufle secondaire 61 dans l'une ou l'autre des configurations de mouflage, et
- une unité de contrôle/commande 9 raccordée au système de détection de présence 8 de la moufle secondaire 61 et conformée pour déterminer automatiquement la configuration de mouflage en fonction de la détection d'absence/présence de la moufle secondaire à l'emplacement de référence.
- Ce système de détection de présence 8 peut comprendre un premier moyen pour détecter la présence/absence de la moufle secondaire 61 à l'intérieur du logement de moufle 55 occupé par la moufle secondaire 61 dans la configuration simple mouflage. Ainsi, si la moufle secondaire 61 est à l'intérieur du logement de moufle 55 alors le dispositif de levage 4 est en configuration simple mouflage, et à l'inverse si la moufle secondaire 61 est absente du logement de moufle 55 alors le dispositif de levage 4 est en configuration double mouflage. Ce premier moyen peut par exemple comprendre un capteur à contact, un capteur mécanique, un capteur électrique, un capteur optique, ... disposé par exemple en face de ou à l'intérieur du logement de moufle 55.
- Ce système de détection de présence 8 peut comprendre un deuxième moyen pour détecter la présence/absence de la moufle secondaire 61 à l'emplacement au-dessus de la moufle principale 51 occupé par la moufle secondaire 61 dans la configuration double mouflage, et en particulier la présence/absence de la moufle secondaire 61 en suspension sur les organes de support prévus sur le chariot restant 6. Ainsi, si la moufle secondaire 61 est présente sur les organes de support alors le dispositif de levage 4 est en configuration double mouflage, et à l'inverse si la moufle secondaire 61 est absente des organes de support alors le dispositif de levage 4 est en configuration simple mouflage. Ce deuxième moyen peut par exemple comprendre un capteur à contact, un capteur mécanique, un capteur électrique, un capteur optique, ... disposé par exemple en face des ou sur les organes de support.
- Ce système de détection de présence 8 peut comprendre un troisième moyen pour détecter la présence/absence du chariot restant 6 à l'emplacement de stockage (sous le pied 20 de la flèche 2 dans le mode de réalisation illustré), dans la mesure où la présence/absence du chariot restant 6 à l'emplacement de stockage est corrélé à la localisation de la moufle secondaire 61 et à la configuration de mouflage. Ainsi, si le chariot restant 6 est présent à l'emplacement de stockage alors le dispositif de levage 4 est en configuration simple mouflage, et à l'inverse si le chariot restant 6 est absent de l'emplacement de stockage alors le dispositif de levage 4 est en configuration double mouflage.
- Ce système de détection de présence 8 peut comprendre tout ou partie du premier moyen, du deuxième moyen et du troisième moyen décrit ci-dessus.
- Dans le mode de réalisation illustré, le système de détection de présence 8 comprend le troisième moyen, visible sur la
Figure 3 , qui comprend un capteur de proximité 80 associé à une butée 81 montée coulissante en translation sur un élément de structure 22 fixe de la grue de levage 1 placé au niveau du pied 20 de la flèche 2, de sorte que la butée 81 se situe en face du chariot restant 6 lorsque ce dernier est à l'emplacement de stockage, sous le pied 20 de la flèche 2. - Cette butée 81 comprend une tige 82 prolongée par une tête élargie 83. La tige 82 est montée coulissante sur l'élément de structure 22 et, à ce titre, la tige 82 traverse cet élément de structure 22 dans un orifice ou palier.
- La tige 82 présente une extrémité avant libre munie d'une surface de butée 84 prévue pour que le chariot restant 6 vienne en butée contre ladite surface de butée 84. A ce titre, le chariot restant 6 peut présenter, sur l'arrière, un butoir arrière 63 propre à venir en appui sur la surface de butée 84.
- Cette surface de butée 84 est élargie relativement à la tige 82, et se présente notamment sous la forme d'un disque de diamètre supérieur au diamètre de la tige 82 si celle-ci est cylindrique.
- La tige 82 présente une extrémité arrière, opposée à l'extrémité avant et donc à la surface de butée 84, sur laquelle est fixée la tête élargie 83. Ainsi, la butée 81 présente de part et d'autre de l'élément de structure 22 :
- une première extrémité présentant la surface de butée 84 et
- une seconde extrémité présentant la tête élargie 83.
- La tête élargie 83 présente une surface de détection 85 plane et inclinée relativement à une direction de coulissement de la butée 81 sur l'élément de structure 22.
- Il est également prévu un organe de rappel 86 élastique intercalée entre l'élément de structure 22 et la surface de butée 84, où cet organe de rappel 86 se présente sous la forme d'un ressort hélicoïdal de compression monté autour de la tige 82.
- Le capteur de proximité 80 est quant à lui monté fixement sur la flèche 2 et est disposé en regard de la surface de détection 85 de la tête élargie 83 de la butée 81, où le capteur de proximité 80 est configuré pour détecter et mesurer la distance entre ledit capteur de proximité 80 et ladite surface de détection 85. Ce capteur de proximité 80 peut par exemple être un capteur inductif ou un capteur lumineux (capteur infrarouge, ...).
- La butée 81 est déplaçable sélectivement entre :
- une position de repos en l'absence de poussée exercée par le chariot restant 6 sur la butée 81, autrement dit en l'absence d'effort de poussée exercé vers l'arrière (autrement dit en direction du pied de flèche) par le butoir arrière 63 du chariot restant 6 sur la surface de butée 84 de la butée 81, étant noté que l'organe de rappel 86 sollicite cette butée 81 vers sa position de repos ; et
- au moins une position de détection en présence d'un effort de poussée exercé par le chariot restant 6 sur la butée 81, autrement dit en présence d'un effort de poussée exercé vers l'arrière par le butoir arrière 63 du chariot restant 6 sur la surface de butée 84 de la butée 81, étant noté que l'organe de rappel 86 offre un effort résistant à cet effort de poussée exercé par le chariot restant 6 sur la butée 81.
- Dans la position de détection, la butée 81 a coulissé (vers l'arrière), comparativement à la position de repos, ce qui contribue à une modification de la distance entre le capteur de proximité 80 et la surface de détection 85, et aussi à une compression de l'organe de rappel 86 entre l'élément de structure 22 et la surface de butée 84. Il est à noter que la surface de détection 85 est inclinée dans le sens d'une réduction de la distance entre le capteur de proximité 80 et la surface de détection 85 lorsque la butée 81 a coulissé (vers l'arrière) de sa position de repos vers la position de détection.
- Comme le capteur de proximité 80 est configuré pour détecter et mesurer la distance entre le capteur de proximité 80 et la surface de détection 85, ce capteur de proximité 80 est alors configuré pour détecter la butée 81 dans sa position de repos et dans sa position de détection, où :
- la position de repos correspond à une configuration double mouflage, le chariot restant 6 étant en déplacement avec le chariot distributeur 5 et donc absent de l'emplacement de stockage au pied 20 de la flèche 2 ; et
- la position de détection correspond à une configuration simple mouflage, le chariot restant 6 étant présent à l'emplacement de stockage au pied 20 de la flèche 2.
- Ainsi, l'unité de contrôle/commande 9 permet de déterminer automatiquement la configuration de mouflage en fonction de la détection opérée par le système de détection de présence 8.
- De manière avantageuse, le système de détermination automatisée du mouflage 7 comprend un module de stockage 90 (ou mémoire) relié à l'unité de contrôle/commande 9 pour stocker au moins une dernière configuration de mouflage déterminée par l'unité de contrôle/commande 9. Autrement dit, est stockée dans ce module de stockage 90 la dernière configuration de mouflage, de sorte que lorsqu'un changement de mouflage est opéré, l'unité de contrôle/commande 9 est conformée pour déterminer automatiquement la configuration de mouflage également en fonction de cette dernière configuration de mouflage stockée dans le module de stockage.
- Une fois la nouvelle configuration de mouflage déterminée, sur la base au moins de la détection faite par le système de détection de présence 8 et de la dernière configuration de mouflage stockée, c'est cette nouvelle configuration de mouflage qui est stockée dans le module de stockage 90 et qui devient donc la dernière configuration de mouflage. Autrement dit, la configuration de mouflage est mise à jour dans le module de stockage 90 à chaque changement de mouflage.
- Comme schématisé sur les
Figures 5 et6 , cette unité de contrôle/commande 9 peut être raccordée au système de distribution 55 et aussi au système de levage 45 pour piloter le déplacement du chariot distributeur 5 et le déplacement du câble de levage 40 (et donc de la moufle principale 51) selon : - une première séquence automatisée faisant passer le dispositif de levage 4 de la configuration simple mouflage vers la configuration double mouflage ; et inversement
- une seconde séquence automatisée faisant passer le dispositif de levage 4 de la configuration double mouflage vers la configuration simple mouflage ;
- Aussi, l'unité de contrôle/commande 9 peut autoriser :
- la première séquence automatisée au moins à la condition où l'unité de contrôle/commande 9 a déterminé que le dispositif de levage 4 est en configuration simple mouflage ;
- la seconde séquence automatisée au moins à la condition où l'unité de contrôle/commande 9 a déterminé que le dispositif de levage 4 est en configuration double mouflage.
- L'unité de contrôle/commande 9 peut également être reliée à un capteur de déroulement prévu sur le treuil de levage 47 et propre à mesurer une longueur déroulée du câble de levage 40. Ainsi, l'unité de contrôle/commande 9 peut comparer les longueurs déroulées du câble de levage 40 au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède cette première séquence automatisée, et l'unité de contrôle/commande 9 peut ainsi déterminer automatiquement la configuration de mouflage en fonction également de cette comparaison entre les longueurs déroulées du câble de levage 40.
- Si ces longueurs déroulées du câble de levage 40 ne sont pas équivalentes, alors l'unité de contrôle/commande 9 établit une présence d'erreur et relance automatiquement la séquence en cours et/ou émet une alarme.
- Ainsi, lors d'une première séquence automatisée, l'unité de contrôle/commande 9 surveille le bon déroulement comme suit :
- l'unité de contrôle/commande 9 vérifie, avant de lancer la première séquence, que le dispositif de levage 4 est en configuration simple mouflage (par exemple par la détection de présence du chariot restant 6 à l'emplacement de stockage) ;
- vérification que la longueur déroulée du câble de levage 40 est équivalente à la longueur déroulée du câble de levage 40 mémorisée lors du changement de mouflage précédent ;
- l'unité de contrôle/commande 9 lance la première séquence en pilotant le déplacement du chariot distributeur 5 et le déplacement du câble de levage 40;
- l'unité de contrôle/commande 9 vérifie que le dispositif de levage 4 est passé configuration double mouflage (par exemple par la détection d'absence du chariot restant 6 à l'emplacement de stockage).
- A l'issue de ces étapes, l'unité de contrôle/commande 9 confirme que la configuration de mouflage est la configuration double mouflage si aucune erreur n'a été détectée, et mémorise cette configuration double mouflage dans le module de stockage 90.
- De même, lors d'une seconde séquence automatisée, l'unité de contrôle/commande 9 surveille le bon déroulement comme suit :
- l'unité de contrôle/commande 9 vérifie, avant de lancer la seconde séquence, que le dispositif de levage 4 est en configuration double mouflage (par exemple par la détection d'absence du chariot restant 6 à l'emplacement de stockage) ;
- vérification que la longueur déroulée du câble de levage 40 est équivalente à la longueur déroulée du câble de levage 40 mémorisée lors du changement de mouflage précédent ;
- l'unité de contrôle/commande 9 lance la seconde séquence en pilotant le déplacement du chariot distributeur 5 et le déplacement du câble de levage 40;
- l'unité de contrôle/commande 9 vérifie que le dispositif de levage 4 est passé configuration simple mouflage (par exemple par la détection de présence du chariot restant 6 à l'emplacement de stockage).
- A l'issue de ces étapes, l'unité de contrôle/commande 9 confirme que la configuration de mouflage est la configuration simple mouflage si aucune erreur n'a été détectée, et mémorise cette configuration simple mouflage dans le module de stockage 90.
- En référence aux
Figures 5 et6 , la grue de levage 1 peut également comprendre un capteur de charge 91 couplé à un brin de levage du câble de levage 90 pour mesurer une tension de levage sur ce brin de levage. - Dans ce cas, l'unité de contrôle/commande 9 est raccordée à ce capteur de charge 91 et est conformée pour calculer une valeur de la charge en fonction de la tension de levage mesurée sur ce brin de levage et de la configuration de mouflage déterminée automatiquement par l'unité de contrôle/commande 9, dans la mesure où une configuration simple mouflage correspond à une répartition de la charge sur deux brins de levage, et une configuration double mouflage correspond à une répartition de la charge sur quatre brins de levage.
- Ainsi, l'unité de contrôle/commande 9 peut comparer la valeur de la charge avec une charge maximale autorisée, et par conséquent l'unité de contrôle/commande 9 peut agir sur le déplacement du chariot distributeur 5 et le déplacement du câble de levage 40 en cas de dépassement de la charge maximale autorisée, et peut en particulier arrêter tout mouvement de la charge en cas de dépassement de la charge maximale autorisée.
Claims (8)
- Grue de levage (1) comprenant une flèche (2) et un dispositif de levage (4) à double mouflage conformé pour distribuer et lever une charge le long de la flèche (2), ledit dispositif de levage (4) étant configurable réversiblement entre deux configurations de mouflage incluant une configuration simple mouflage à deux brins de levage et une configuration double mouflage à quatre brins de levage, et le dispositif de levage (4) comprenant un système de changement de mouflage permettant de réaliser un changement de mouflage entre la configuration simple mouflage et la configuration double mouflage, et inversement, ladite grue de levage (1) comprenant un système de détermination automatisée du mouflage (7) conformé pour déterminer automatiquement la configuration de mouflage entre la configuration simple mouflage et la configuration double mouflage,ladite grue de levage étant caractérisée en ce que le dispositif de levage (4) comprend un chariot distributeur (5) comprenant une structure suspendue (50) sur la flèche (2) et reliée à un système de distribution (55) propre à déplacer le chariot distributeur (5) le long de la flèche (2) selon une direction avant et une direction arrière opposées, et une moufle principale (51) suspendue à ladite structure suspendue (50) par un câble de levage (40) ;et dans laquelle le système de changement de mouflage comprend une moufle secondaire (61) et un mécanisme de verrouillage/déverrouillage coopérant avec la moufle principale (51) et la moufle secondaire (61) pour passer de la configuration simple mouflage à la configuration double mouflage ou inversement ; etle système de détermination automatisée du mouflage (7) comprend au moins :- un système de détection de présence (8) de la moufle secondaire (61) propre à détecter une présence/absence de la moufle secondaire (61) à un emplacement de référence prédéterminé occupé par ladite moufle secondaire (61) dans l'une ou l'autre des configurations de mouflage, et- une unité de contrôle/commande (9) raccordée au système de détection de présence (8) de la moufle secondaire (61) et conformée pour déterminer automatiquement la configuration de mouflage en fonction de la détection d'absence/présence de la moufle secondaire (61) à l'emplacement de référence ;- en ce que le système de changement de mouflage fait passer le dispositif de levage (4) de la configuration simple mouflage vers la configuration double mouflage, et inversement, par déplacement du chariot distributeur (5) avec sa moufle principale (51), et l'unité de contrôle/commande (9) est raccordée au système de distribution (55) pour piloter le déplacement du chariot distributeur (5) selon :- une première séquence automatisée faisant passer le dispositif de levage (4) de la configuration simple mouflage vers la configuration double mouflage ; et inversement- une seconde séquence automatisée faisant passer le dispositif de levage (4) de la configuration double mouflage vers la configuration simple mouflage ;en fonction de la configuration de mouflage déterminée automatiquement par ladite unité de contrôle/commande (9) ;en ce qu'elle comprend un treuil de levage (47) muni d'un tambour de levage coopérant avec le câble de levage (40) pour déplacer la charge en montée et en descente, ledit treuil de levage (47) étant équipé d'un capteur de déroulement propre à mesurer une longueur déroulée du câble de levage (40), où l'unité de contrôle/commande (9) est conformée pour comparer les longueurs déroulées du câble de levage (40) au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée ;et en ce que l'unité de contrôle/commande (9) est conformée pour déterminer automatiquement la configuration de mouflage en fonction également de la comparaison entre les longueurs déroulées du câble de levage (40) au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée.
- Grue de levage (1) selon la revendication 1, dans laquelle le système de détermination automatisée du mouflage (7) comprend un module de stockage (90) relié à l'unité de contrôle/commande (9) pour stocker au moins une dernière configuration de mouflage déterminée par l'unité de contrôle/commande (9),
et l'unité de contrôle/commande (9) est conformée pour déterminer automatiquement la configuration de mouflage également en fonction de ladite dernière configuration de mouflage stockée dans le module de stockage (90). - Grue de levage (1) selon l'une quelconque des revendications 1 et 2, dans laquelle :- dans la configuration simple mouflage, le mécanisme de verrouillage/déverrouillage déverrouille la moufle secondaire (61) qui reste positionnée à l'intérieur d'un logement de moufle (55) prévu sur la moufle principale (51) de sorte que le câble de levage (40) coopère avec la moufle principale (51) pour un levage à deux brins de levage, et- dans la configuration double mouflage, le mécanisme de verrouillage/déverrouillage verrouille la moufle secondaire (61) sur le chariot distributeur (5) à un emplacement au-dessus de la moufle principale (51) de sorte que le câble de levage (40) coopère à la fois avec la moufle principale (51) et la moufle secondaire (61) pour un levage à quatre brins de levage.
- Grue de levage (1) selon la revendication 3, dans laquelle le système de détection de présence (8) de la moufle secondaire (61) est configuré pour détecter la présence/absence de la moufle secondaire (61) à l'intérieur du logement de moufle (55) occupé par la moufle secondaire (61) dans la configuration simple mouflage et/ou à l'emplacement au-dessus de la moufle principale (51) occupé par la moufle secondaire (61) dans la configuration double mouflage.
- Grue de levage (1) selon l'une quelconque des revendications 3 et 4, dans laquelle le système de changement de mouflage comprend un chariot restant (6) comprenant une armature suspendue (60) sur la flèche (2) et supportant la moufle secondaire (61), où :- dans la configuration double mouflage, le mécanisme de verrouillage/déverrouillage verrouille ensemble le chariot distributeur (5) et le chariot restant (6) qui sont assemblées et déplaçables en association le long de la flèche (2), et la moufle secondaire (61) est suspendue sur le chariot restant (6) à l'emplacement au-dessus de la moufle principale (51) ; et- dans la configuration simple mouflage, le mécanisme de verrouillage/déverrouillage déverrouille le chariot restant (6), de sorte que le chariot distributeur (5) et le chariot restant (6) sont désassemblés, la moufle secondaire (61) est logée à l'intérieur du logement de moufle (55) prévu sur la moufle principale (51) et le chariot distributeur (5) est déplaçable seul tandis que le chariot restant (6) est positionné statiquement avec la moufle secondaire (61) à un emplacement de stockage ;et le système de détection de présence (8) de la moufle secondaire (61) est configuré pour détecter une présence/absence du chariot restant (6) à l'emplacement de stockage.
- Grue de levage (1) selon l'une quelconque des revendications 1 à 5, comprenant un capteur de charge (91) couplé à un brin de levage du câble de levage (40) pour mesurer une tension de levage sur ledit brin de levage, où l'unité de contrôle/commande (9) est raccordée au capteur de charge (91) et est conformée pour calculer une valeur de la charge en fonction de ladite tension de levage sur ledit brin de levage et de la configuration de mouflage déterminée automatiquement par ladite unité de contrôle/commande (9), et par exemple pour comparer la valeur de la charge avec une charge maximale autorisée.
- Procédé de pilotage d'une grue de levage (1) selon l'une quelconque des revendications 1 à 6, comprenant les étapes de :- réaliser un changement de mouflage entre la configuration simple mouflage et la configuration double mouflage, ou inversement ;- détecter une présence/absence de la moufle secondaire (61) à un emplacement de référence prédéterminé occupé par ladite moufle secondaire (61) dans l'une ou l'autre des configurations de mouflage ;- déterminer automatiquement la configuration de mouflage entre la configuration simple mouflage et la configuration double mouflage en fonction de la détection d'absence/présence de la moufle secondaire (61) à l'emplacement de référence ; ledit procédé de pilotage comprenant une étape de piloter le déplacement du chariot distributeur (5) selon :- une première séquence automatisée faisant passer le dispositif de levage (4) de la configuration simple mouflage vers la configuration double mouflage ; et inversement- une seconde séquence automatisée faisant passer le dispositif de levage (4) de la configuration double mouflage vers la configuration simple mouflage ;en fonction de la configuration de mouflage déterminée automatiquement ; etledit procédé de pilotage comprenant les étapes de :- mesurer une longueur déroulée du câble de levage (40), ledit câble de levage (40) coopérant avec un tambour de levage d'un treuil de levage (47) pour déplacer la charge en montée et en descente,- comparer les longueurs déroulées du câble de levage (40) au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée ;et dans lequel la configuration du dispositif de levage (4) est déterminée automatiquement en fonction également de la comparaison entre les longueurs déroulées du câble de levage (40) au début d'une première séquence automatisée et au début d'une seconde séquence automatisée qui suit ou précède ladite première séquence automatisée..
- Procédé de pilotage selon la revendication 7, comprenant les étapes de :- mesurer une tension de levage sur un brin du câble de levage (40) ;- calculer une valeur de la charge en fonction de ladite tension de levage sur ledit brin du câble de levage (40) et de la configuration de mouflage déterminée automatiquement, et par exemple de comparer la valeur de la charge avec une charge maximale autorisée.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1913446A FR3103803B1 (fr) | 2019-11-29 | 2019-11-29 | Grue de levage avec système de détermination automatisée du mouflage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3828124A1 EP3828124A1 (fr) | 2021-06-02 |
| EP3828124B1 true EP3828124B1 (fr) | 2024-04-24 |
Family
ID=69468910
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20209155.9A Active EP3828124B1 (fr) | 2019-11-29 | 2020-11-23 | Grue de levage avec système de détermination automatisée du mouflage |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11753284B2 (fr) |
| EP (1) | EP3828124B1 (fr) |
| ES (1) | ES2982697T3 (fr) |
| FR (1) | FR3103803B1 (fr) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3137908B1 (fr) * | 2022-07-12 | 2025-01-10 | Manitowoc Crane Group France | Procédé automatique pour la détermination lors d’un levage d’une position physique de fin de course d’un moufle d’une grue à tour |
| FR3139561B1 (fr) | 2022-09-14 | 2024-12-20 | Manitowoc Crane Group France | Engin de levage avec changement de mouflage automatisé |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2463394A (en) * | 1945-10-17 | 1949-03-01 | Carl B King | Hoist |
| SU397470A1 (ru) * | 1969-02-06 | 1973-09-17 | Грузовой полиспаст переменной кратности для стреловых кранов | |
| DE2116544A1 (de) * | 1971-04-05 | 1972-11-23 | F.B. Kroell A/S, Roedovre (Dänemark) | Umschervorrichtung für Windwerke mit einer mehrsträngig aufgehängten Unterflasche |
| US3993287A (en) * | 1973-02-09 | 1976-11-23 | Linden-Alimak Ab | Method and device of reblocking to an increased or reduced number of rope parts at a hoisting gear |
| US6926103B1 (en) * | 2001-07-02 | 2005-08-09 | Itrec B.V. | Splittable block on a derrick |
| FR3061164B1 (fr) | 2016-12-23 | 2019-05-24 | Manitowoc Crane Group France | Grue de levage comprenant un dispositif de levage a double mouflage |
| FR3061163B1 (fr) | 2016-12-23 | 2019-05-24 | Manitowoc Crane Group France | Grue de levage comprenant un dispositif de levage a double mouflage |
| CN109879181B (zh) * | 2019-03-13 | 2024-02-13 | 科曼萨建设机械(杭州)有限公司 | 动臂塔机的自动换倍率转换装置及其使用方法 |
-
2019
- 2019-11-29 FR FR1913446A patent/FR3103803B1/fr not_active Expired - Fee Related
-
2020
- 2020-11-23 EP EP20209155.9A patent/EP3828124B1/fr active Active
- 2020-11-23 ES ES20209155T patent/ES2982697T3/es active Active
- 2020-11-25 US US17/104,643 patent/US11753284B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20210188599A1 (en) | 2021-06-24 |
| FR3103803A1 (fr) | 2021-06-04 |
| EP3828124A1 (fr) | 2021-06-02 |
| ES2982697T3 (es) | 2024-10-17 |
| FR3103803B1 (fr) | 2022-02-11 |
| US11753284B2 (en) | 2023-09-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3828124B1 (fr) | Grue de levage avec système de détermination automatisée du mouflage | |
| EP3466862B1 (fr) | Grue à flèche relevable avec dispositif de verrouillage de la flèche en configuration relevée | |
| EP2167251B1 (fr) | Dispositif de manutention d'une charge telle qu'une bobine de tole | |
| EP4049960B1 (fr) | Dispositif de levage à double mouflage avec mécanisme de verrouillage à loquet | |
| EP3415458B1 (fr) | Dispositif et procédé de tension automatisée d'un câble distributeur pour grue | |
| EP3418245A1 (fr) | Dispositif pour la manutention d'objet | |
| EP3791844A1 (fr) | Systeme d'automatisation du chargement et de l'extraction d'un chariot sur un recepteur | |
| FR2692528A1 (fr) | Dispositif de captation d'électricité pour un véhicule tel qu'un trolleybus ou un tramway. | |
| FR2949627A1 (fr) | Procede pour verifier l'etat d'un frein d'un mecanisme commande par un convertisseur de frequence ou autre controleur | |
| CA2039391C (fr) | Dispositif de manoeuvre d'un engin supporte par un train principal et au moins une roue orientable, tel qu'un helicoptere, entre deux zones determinees sur une plateforme, telles qu'une aire d'appontage et une aire de garage sur un pont de navire | |
| FR2956653A1 (fr) | Dispositif de manutention d'objets pour au moins retourner un meuble, tes que par exemple un lit. | |
| FR2503120A1 (fr) | Dispositif de commande pour un mecanisme de chargement et de dechargement | |
| EP2035310B1 (fr) | Devidoir a mandrin expansible pour bobine | |
| EP0340076B1 (fr) | Appareil de manutention et de chargement d'objets allongés tels que des échelles sur le toit d'un véhicule | |
| FR3022230A1 (fr) | Systeme declencheur d'un dispositif de blocage de cabine d'ascenseur, notamment limiteur de vitesse. | |
| EP2133261B1 (fr) | Dispositif enrouleur et étarqueur de voile d'avant ralinguée ou à guindant libre pour voilier | |
| EP4345052B1 (fr) | Engin de levage avec changement de configuration de mouflage automatisé | |
| EP3924070B1 (fr) | Connecteur, fausse fourche largable muni d'un tel connecteur et procédé d'utilisation | |
| EP4273085B1 (fr) | Dispositif de levage à double mouflage avec mécanisme amélioré de verrouillage à loquet | |
| FR2678596A1 (fr) | Dispositif de prehension pour le levage ou la manutention de pieces. | |
| EP4049959B1 (fr) | Procédé de sécurisation d'une grue à flèche inclinable pour sécuriser une position angulaire d'une flèche inclinable | |
| FR2939398A1 (fr) | Dispositif pour securiser la manutention d'une charge roulante sur une plate-forme telle que le pont d'un navire soumis a une mer agitee. | |
| FR3159382A1 (fr) | Système et procédé de levage de colis | |
| FR2678576A1 (fr) | Systeme de bloqueurs interdependants pour palans de chariot d'ecoute de grand-voile et analogues. | |
| FR2647584A1 (fr) | Dispositif de levage auxiliaire pour reacteur nucleaire |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20211117 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B66C 23/26 20060101ALI20231027BHEP Ipc: B66C 23/90 20060101ALI20231027BHEP Ipc: B66D 3/04 20060101AFI20231027BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20231116 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602020029465 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20240424 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1679431 Country of ref document: AT Kind code of ref document: T Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240824 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240725 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240826 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2982697 Country of ref document: ES Kind code of ref document: T3 Effective date: 20241017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240826 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240724 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240824 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240725 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240724 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602020029465 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20250127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241123 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20241123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241130 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20241130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240424 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241123 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241123 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20251119 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241123 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20251126 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20251229 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20201123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20201123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241123 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20251125 Year of fee payment: 6 |
|
| PGRI | Patent reinstated in contracting state [announced from national office to epo] |
Ref country code: IT Effective date: 20250331 |