JP2004185332A - ネットワークサーボシステム - Google Patents
ネットワークサーボシステム Download PDFInfo
- Publication number
- JP2004185332A JP2004185332A JP2002351869A JP2002351869A JP2004185332A JP 2004185332 A JP2004185332 A JP 2004185332A JP 2002351869 A JP2002351869 A JP 2002351869A JP 2002351869 A JP2002351869 A JP 2002351869A JP 2004185332 A JP2004185332 A JP 2004185332A
- Authority
- JP
- Japan
- Prior art keywords
- positioning
- network
- servo system
- positioning completion
- completion signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images


Landscapes
- Numerical Control (AREA)
- Programmable Controllers (AREA)
Abstract
【課題】配線本数を低減し、位置決め時間の早いネットワークサーボシステムを提供することを目的とする。
【解決手段】位置決め完了信号をORで接続し、コントローラが指定した軸だけが位置決め完了を出力する事で配線本数の増大を防止する。
【選択図】 図2
【解決手段】位置決め完了信号をORで接続し、コントローラが指定した軸だけが位置決め完了を出力する事で配線本数の増大を防止する。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
本発明シリアルで結合されたFAなどに用いる、ネットワークサーボシステムに関する。
【0002】
【従来の技術】
従来のネットワークサーボシステムは例えば図1のようになっている。コントローラ1とサーボドライバ4はネットワーク3で接続されていて、位置データや位置決め完了信号2はシリアルの通信で送られて来ている。
通信による位置決め完了では次のシーケンスに進むのにタイムラグが発生し全体の位置決め時間が長くなる、これはマウンター等では問題となっている。位置決め完了信号2を個別にコントローラ1に返すことが考えられるが、これでは配線本数が増大しネットワーク3の良さが激減するし、コントローラ1も入力が増えたりする(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平10−3311号公報(第4―5頁、図1)
【0004】
【発明が解決しようとする課題】
本発明は上記課題を解決するためになされたものであり、配線本数を低減し、位置決め時間の早いネットワークサーボシステムを提供することを目的とする。
【0005】
【課題を解決するための手段】
位置決め完了信号をORで接続し、コントローラが指定した軸だけが位置決め完了を出力する事で配線本数の増大を防止する。
【0006】
【発明の実施の形態】
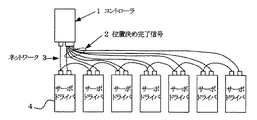
図2は本発明の構成である。コントローラ1とサーボドライバ4はネットワーク3と位置決め完了信号2の2本のケーブルでデージーチェーンでつながれている。図3はこのサーボドライバ側の回路を示す、ネットワーク3で送られる位置決めコマンドは位置決めの指令と位置決めする位置のデータが含まれている、さらに特定のビットが位置決め完了出力イネーブルビットとなっている、上位のコントローラ1は特定のサーボドライバ4に位置決め完了時に位置決め完了を出力させるものである。位置決め完了出力イネーブルビットが立っていて、且つ内部で位置決めが完了すると、これらはANDが取られ、フォトカプラーをONさせる。フォトカプラーの出力はOR他の軸とORが取られているので、どの軸でも同じ信号となっているので、1点の入力を上位コントローラ1はチェックすれば良い、軸の指定は事前に行うので図1の方式に比べ位置決め完了を全てスキャンするよりも早い時間で次のシーケンスへ進む事が可能になる。
【0007】
【発明の効果】
以上述べたように本発明によれば、配線本数がさほど増加せずに位置決め時間の早いサーボを供する事が出来る。
【図面の簡単な説明】
【図1】従来のネットワークサーボシステムを示すブロック図。
【図2】本発明の実施例を示すネットワークサーボシステムのブロック図。
【図3】サーボドライバ側の回路図。
【符号の説明】
1 コントローラ
2 位置決め完了信号
3 ネットワーク
4 サーボドライバ
【発明の属する技術分野】
本発明シリアルで結合されたFAなどに用いる、ネットワークサーボシステムに関する。
【0002】
【従来の技術】
従来のネットワークサーボシステムは例えば図1のようになっている。コントローラ1とサーボドライバ4はネットワーク3で接続されていて、位置データや位置決め完了信号2はシリアルの通信で送られて来ている。
通信による位置決め完了では次のシーケンスに進むのにタイムラグが発生し全体の位置決め時間が長くなる、これはマウンター等では問題となっている。位置決め完了信号2を個別にコントローラ1に返すことが考えられるが、これでは配線本数が増大しネットワーク3の良さが激減するし、コントローラ1も入力が増えたりする(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平10−3311号公報(第4―5頁、図1)
【0004】
【発明が解決しようとする課題】
本発明は上記課題を解決するためになされたものであり、配線本数を低減し、位置決め時間の早いネットワークサーボシステムを提供することを目的とする。
【0005】
【課題を解決するための手段】
位置決め完了信号をORで接続し、コントローラが指定した軸だけが位置決め完了を出力する事で配線本数の増大を防止する。
【0006】
【発明の実施の形態】
図2は本発明の構成である。コントローラ1とサーボドライバ4はネットワーク3と位置決め完了信号2の2本のケーブルでデージーチェーンでつながれている。図3はこのサーボドライバ側の回路を示す、ネットワーク3で送られる位置決めコマンドは位置決めの指令と位置決めする位置のデータが含まれている、さらに特定のビットが位置決め完了出力イネーブルビットとなっている、上位のコントローラ1は特定のサーボドライバ4に位置決め完了時に位置決め完了を出力させるものである。位置決め完了出力イネーブルビットが立っていて、且つ内部で位置決めが完了すると、これらはANDが取られ、フォトカプラーをONさせる。フォトカプラーの出力はOR他の軸とORが取られているので、どの軸でも同じ信号となっているので、1点の入力を上位コントローラ1はチェックすれば良い、軸の指定は事前に行うので図1の方式に比べ位置決め完了を全てスキャンするよりも早い時間で次のシーケンスへ進む事が可能になる。
【0007】
【発明の効果】
以上述べたように本発明によれば、配線本数がさほど増加せずに位置決め時間の早いサーボを供する事が出来る。
【図面の簡単な説明】
【図1】従来のネットワークサーボシステムを示すブロック図。
【図2】本発明の実施例を示すネットワークサーボシステムのブロック図。
【図3】サーボドライバ側の回路図。
【符号の説明】
1 コントローラ
2 位置決め完了信号
3 ネットワーク
4 サーボドライバ
Claims (2)
- 上位コントローラとネットワークで、デェージーチェーンで接続された複数のサーボドライブ装置と、サーボドライブ装置が、各々の位置決め完了信号をORで接続し、上位コントローラから指定された軸だけが、位置決め完了信号を出力する事を特徴とする多軸サーボシステム。
- 上位コントローラとネットワークで、デェージーチェーンで接続された複数のサーボドライブ装置と、サーボドライブ装置が、各々の位置決め完了信号をORで接続し、上位コントローラから指定された軸だけが、位置決め完了信号を出力する事を特徴とする多軸サーボシステムで、位置決め完了を返す軸は事前に設定する事で、完了のスキャンを不要とした位置決めシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002351869A JP2004185332A (ja) | 2002-12-04 | 2002-12-04 | ネットワークサーボシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002351869A JP2004185332A (ja) | 2002-12-04 | 2002-12-04 | ネットワークサーボシステム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004185332A true JP2004185332A (ja) | 2004-07-02 |
Family
ID=32753632
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002351869A Abandoned JP2004185332A (ja) | 2002-12-04 | 2002-12-04 | ネットワークサーボシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004185332A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104963041A (zh) * | 2015-05-27 | 2015-10-07 | 台嘉玻璃纤维有限公司 | 捻纱机的plc控制系统 |
-
2002
- 2002-12-04 JP JP2002351869A patent/JP2004185332A/ja not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104963041A (zh) * | 2015-05-27 | 2015-10-07 | 台嘉玻璃纤维有限公司 | 捻纱机的plc控制系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH04346151A (ja) | データ処理装置及びファクシミリ装置 | |
| JPH0749832A (ja) | 情報処理装置 | |
| JPH07105128A (ja) | データ転送装置 | |
| JP2004185332A (ja) | ネットワークサーボシステム | |
| WO2002019047A3 (en) | Universal controller expansion module system, method & apparatus | |
| CN100461066C (zh) | 多层系统和时钟控制方法 | |
| JPH1083215A (ja) | モータ制御装置 | |
| CN116233575A (zh) | 图像信号处理板卡、方法和系统 | |
| KR100656171B1 (ko) | 호스트 컴퓨터와 다수의 통신모듈간의 인터페이싱 시스템 | |
| JP2004334551A (ja) | シリアル通信システム及びシリアル通信用ローカル端末 | |
| JPH0973310A (ja) | 数値制御装置及び数値制御システム | |
| JPH09237247A (ja) | バス幅変換装置およびバス幅変換システム装置 | |
| JPS62182857A (ja) | 入出力制御装置 | |
| JPS6136859A (ja) | インタフエ−ス制御装置 | |
| JPH09198113A (ja) | 多軸位置決め装置 | |
| JP2541105B2 (ja) | 通信プロトコル間のゲ―ト方式 | |
| JP2006018536A (ja) | メモリ装置、メモリ制御方法並びに情報処理装置 | |
| JP3268347B2 (ja) | バス接続制御システム | |
| KR100320563B1 (ko) | 메모리 및 입출력 포트 인터페이스 제어 장치 | |
| JP2873711B2 (ja) | データ転送方式 | |
| JP2000322370A (ja) | データ出力回路 | |
| JPH02183809A (ja) | トランスファーライン用数値制御装置 | |
| JPH06335056A (ja) | 遠隔制御システムのデータ伝送方式 | |
| JPH06290128A (ja) | 制御装置の通信切換システム | |
| JPH0282342A (ja) | データ通信装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20051115 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20080218 |