JP2005333702A - 可動マグネット型リニアモータを内蔵したスライド装置 - Google Patents
可動マグネット型リニアモータを内蔵したスライド装置 Download PDFInfo
- Publication number
- JP2005333702A JP2005333702A JP2004147906A JP2004147906A JP2005333702A JP 2005333702 A JP2005333702 A JP 2005333702A JP 2004147906 A JP2004147906 A JP 2004147906A JP 2004147906 A JP2004147906 A JP 2004147906A JP 2005333702 A JP2005333702 A JP 2005333702A
- Authority
- JP
- Japan
- Prior art keywords
- bed
- slide device
- recess
- armature
- field magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Linear Motors (AREA)
Abstract
【解決手段】このスライド装置は,テーブル1に設けた8極でなる界磁マグネット6と界磁マグネット6に対向してベッド2に設けた矩形状のコアレスでなる12個の電機子コイル7を持つ電機子組立体5を有し,テーブル1に界磁マグネット6を位置決め可能にする凹部35を形成し,凹部35を界磁マグネット6の板厚の1/3以下の深さに形成する。【選択図】図5
Description
前記ベッドはコイルヨークとして及び前記テーブルはマグネットヨークとして,磁気回路部分になる磁性材料から構成され,且つ前記テーブルの前記第1対向面に多数の前記マグネットでなる前記界磁マグネットを位置決め可能にする第1凹部が形成され,前記第1凹部は前記界磁マグネットの板厚の1/3以下の深さに形成されていることを特徴とするスライド装置に関する。
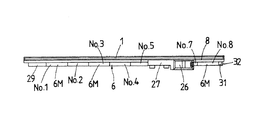
2 ベッド
3 軌道レール
4 スライダ
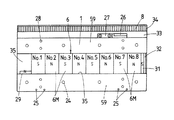
5 電機子組立体
6 界磁マグネット
7 電機子コイル
8 リニアスケール
9 側面カバー
10 直動案内ユニット
11 基板
14 コネクタブロック
15 センサ
16 支持バンド
17 電源線
18 センサ線
19 信号線
20,30 取付基準面
21 センサ支持ブラケット
25 ノックピン
35 凹部(第1凹部)
40 磁気検知素子(ホールIC)
50 凹部(第2凹部)
51 凹部(第3凹部)
55 凹部(第4凹部)
57 対向面(第1対向面)
58 対向面(第2対向面)
59 側部
60,61 側面
68 結線部分
d テーブルの凹部の深さ
m 電機子コイルの厚み
t 界磁マグネットの板厚
Claims (8)
- 長尺な板状でなるベッド,前記ベッドの長手方向に直動案内ユニットを介して往復移動自在な板状でなるテーブル,前記テーブルの前記ベッドに対する第1対向面に前記テーブルの移動方向に極性が交互に異にして並設された多数のマグネットでなる界磁マグネット,及び前記界磁マグネットに対向して前記ベッドの前記テーブルに対する第2対向面に前記長手方向に沿って矩形状のコアレスでなる電機子コイルを多数配設した電機子組立体を有する可動マグネット型リニアモータを内蔵したスライド装置において, 前記ベッドはコイルヨークとして及び前記テーブルはマグネットヨークとして,磁気回路部分になる磁性材料から構成され,且つ前記テーブルの前記第1対向面に多数の前記マグネットでなる前記界磁マグネットを位置決め可能にする第1凹部が形成され,前記第1凹部は前記界磁マグネットの板厚の1/3以下の深さに形成されていることを特徴とするスライド装置。
- 前記テーブルに形成された前記第1凹部は,0.05mm〜0.5mmの深さに形成されていることを特徴とする請求項1に記載のスライド装置。
- 前記界磁マグネットは前記マグネットの数が8個で構成され,及び前記電機子組立体は三相通電方式で各相の電流が供給される3個の前記電機子コイルが一組として構成されて前記電機子コイルの数が総計で12個から構成されていることを特徴とする請求項1又は2に記載のスライド装置。
- 前記ベッドの前記第2対向面には,前記電機子組立体が配設される第2凹部が形成され,前記第2凹部は前記電機子コイルの厚みの半分より浅く形成され,前記電機子組立体の両側面には異物の侵入を防止する側面カバーが配設されていることを特徴とする請求項1〜3のいずれか1項に記載のスライド装置。
- 前記テーブルは,突出部の無い平坦面に形成され,前記平坦面に位置決めピンにより位置決めされた前記直動案内ユニットにおけるスライダが固着され,前記スライダは,前記ベッドに固着された前記直動案内ユニットにおける軌道レールに転動体を介して摺動自在に跨架されていることを特徴とする請求項1〜4のいずれか1項に記載のスライド装置。
- 前記電機子組立体の中央に位置する6個の前記電機子コイルには,前記界磁マグネットを検知する磁気検知素子がそれぞれ配設されていることを特徴とする請求項1〜5のいずれか1項に記載のスライド装置。
- 前記テーブルの前記第1対向面の側部には,前記長手方向に沿ってリニアエンコーダでなるリニアスケールが固着され,前記ベッドの側面には,前記リニアスケールに対向してリニアエンコーダでなるセンサを配設するために前記センサの支持ブラケットを固着する取付用の第3凹部が形成されていることを特徴とする請求項1〜6のいずれか1項に記載のスライド装置。
- 前記ベッドの端部には,前記電機子組立体における前記電機子コイルを覆う基板に,電源線と信号線との結線部分を保護し且つ前記ベッドから前記テーブルの飛び出しを規制するコネクタブロックが固着され,前記コネクタブロックには,前記センサからのセンサ線を支持するための支持バンドを固着する前記支持バンドの取付用の第4凹部が形成されていることを特徴とする請求項7に記載のスライド装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004147906A JP4521221B2 (ja) | 2004-05-18 | 2004-05-18 | 可動マグネット型リニアモータを内蔵したスライド装置 |
| US11/098,532 US7170204B2 (en) | 2004-05-18 | 2005-04-05 | Sliding device with onboard moving-magnet linear motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004147906A JP4521221B2 (ja) | 2004-05-18 | 2004-05-18 | 可動マグネット型リニアモータを内蔵したスライド装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005333702A true JP2005333702A (ja) | 2005-12-02 |
| JP2005333702A5 JP2005333702A5 (ja) | 2006-06-08 |
| JP4521221B2 JP4521221B2 (ja) | 2010-08-11 |
Family
ID=35374516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004147906A Expired - Lifetime JP4521221B2 (ja) | 2004-05-18 | 2004-05-18 | 可動マグネット型リニアモータを内蔵したスライド装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7170204B2 (ja) |
| JP (1) | JP4521221B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007300759A (ja) * | 2006-05-02 | 2007-11-15 | Nippon Thompson Co Ltd | 可動マグネット型リニアモータを内蔵したスライド装置 |
| JP2024520640A (ja) * | 2021-06-02 | 2024-05-24 | ケアフュージョン 303、インコーポレイテッド | 自動調整式ivスタンド |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4702629B2 (ja) * | 2004-05-14 | 2011-06-15 | 株式会社安川電機 | ムービングマグネット形リニアスライダおよびそれを用いた工作機械 |
| JP4684679B2 (ja) * | 2005-02-23 | 2011-05-18 | 日本トムソン株式会社 | リニアモータを内蔵したスライド装置 |
| EP1732197B1 (de) * | 2005-06-09 | 2015-06-10 | Alois Jenny | Linearmotor mit integrierter Führung |
| FR2887376B1 (fr) * | 2005-06-15 | 2007-12-14 | Sonceboz Sa Sa Suisse | Servo-actionneur electromagnetique monophase rotatif comprenant un actionneur et un capteur de position |
| JP5253824B2 (ja) * | 2008-01-11 | 2013-07-31 | ヤマハ発動機株式会社 | リニアモータ、部品実装装置及び部品検査装置 |
| JP6046919B2 (ja) * | 2012-05-28 | 2016-12-21 | 日本トムソン株式会社 | スライド装置 |
| DE102013019958B4 (de) | 2013-12-09 | 2024-06-27 | Jenny Science Ag | Linearmotor mit optimierter Leistung |
| EP3262397B1 (en) * | 2015-02-27 | 2022-06-08 | Hycor Biomedical, LLC | Apparatuses for suspending and washing the contents of a plurality of cuvettes |
| EP3672044B1 (de) * | 2018-12-19 | 2024-05-22 | Etel S.A. | Linearmotorsystem sowie schnittstellenvorrichtung für einen linearmotor |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6391780U (ja) * | 1986-12-04 | 1988-06-14 | ||
| JPH04359662A (ja) * | 1991-06-06 | 1992-12-11 | Fuji Electric Co Ltd | 自動搬送装置用リニアモータの保護装置 |
| JPH08275493A (ja) * | 1995-03-28 | 1996-10-18 | Matsushita Electric Works Ltd | 自動扉用リニアモータ |
| JPH09266659A (ja) * | 1996-03-28 | 1997-10-07 | Nippon Thompson Co Ltd | 小形リニアモータテーブル |
| JPH09511380A (ja) * | 1995-02-03 | 1997-11-11 | クラウス−マツフアイ アクチエンゲゼルシヤフト | 同期リニアモータ |
| JP2001095225A (ja) * | 1999-09-20 | 2001-04-06 | Yaskawa Electric Corp | リニアモータ |
| JP2002010617A (ja) * | 2000-06-22 | 2002-01-11 | Nippon Thompson Co Ltd | 可動マグネット型リニアモータを内蔵したスライド装置 |
| JP2002136001A (ja) * | 2000-10-25 | 2002-05-10 | Mitsubishi Electric Corp | 永久磁石形モータ |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0734646B2 (ja) * | 1989-07-15 | 1995-04-12 | 松下電工株式会社 | リニアモータ |
| DE19603989A1 (de) * | 1996-02-05 | 1997-08-07 | Basf Ag | Wässrige Polyurethandispersionen enthaltend Struktureinheiten abgeleitet von Alkenyl- oder Alkylbernsteinsäure |
| AU7328598A (en) * | 1997-05-02 | 1998-11-27 | Ats Automation Tooling Systems Inc. | Modular conveyor system having multiple moving elements under independent ontrol |
| US6239516B1 (en) * | 1998-04-06 | 2001-05-29 | Kollmorgan Corporation | High performance ironless linear motor with supported windings |
| JP2001025229A (ja) * | 1999-07-06 | 2001-01-26 | Nippon Thompson Co Ltd | 可動コイル型リニアモータを内蔵したスライド装置 |
| JP2002191163A (ja) * | 2000-12-21 | 2002-07-05 | Thk Co Ltd | リニアモータ及びこれを駆動源とする駆動装置 |
-
2004
- 2004-05-18 JP JP2004147906A patent/JP4521221B2/ja not_active Expired - Lifetime
-
2005
- 2005-04-05 US US11/098,532 patent/US7170204B2/en not_active Expired - Lifetime
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6391780U (ja) * | 1986-12-04 | 1988-06-14 | ||
| JPH04359662A (ja) * | 1991-06-06 | 1992-12-11 | Fuji Electric Co Ltd | 自動搬送装置用リニアモータの保護装置 |
| JPH09511380A (ja) * | 1995-02-03 | 1997-11-11 | クラウス−マツフアイ アクチエンゲゼルシヤフト | 同期リニアモータ |
| JPH08275493A (ja) * | 1995-03-28 | 1996-10-18 | Matsushita Electric Works Ltd | 自動扉用リニアモータ |
| JPH09266659A (ja) * | 1996-03-28 | 1997-10-07 | Nippon Thompson Co Ltd | 小形リニアモータテーブル |
| JP2001095225A (ja) * | 1999-09-20 | 2001-04-06 | Yaskawa Electric Corp | リニアモータ |
| JP2002010617A (ja) * | 2000-06-22 | 2002-01-11 | Nippon Thompson Co Ltd | 可動マグネット型リニアモータを内蔵したスライド装置 |
| JP2002136001A (ja) * | 2000-10-25 | 2002-05-10 | Mitsubishi Electric Corp | 永久磁石形モータ |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007300759A (ja) * | 2006-05-02 | 2007-11-15 | Nippon Thompson Co Ltd | 可動マグネット型リニアモータを内蔵したスライド装置 |
| US7633188B2 (en) | 2006-05-02 | 2009-12-15 | Nippon Thompson Co., Ltd. | Sliding device with onboard moving-magnet linear motor |
| JP2024520640A (ja) * | 2021-06-02 | 2024-05-24 | ケアフュージョン 303、インコーポレイテッド | 自動調整式ivスタンド |
| JP7828370B2 (ja) | 2021-06-02 | 2026-03-11 | ケアフュージョン 303、インコーポレイテッド | 自動調整式ivスタンド |
Also Published As
| Publication number | Publication date |
|---|---|
| US7170204B2 (en) | 2007-01-30 |
| JP4521221B2 (ja) | 2010-08-11 |
| US20050258689A1 (en) | 2005-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4104810B2 (ja) | 可動マグネット型リニアモータを内蔵したスライド装置 | |
| JP4094799B2 (ja) | 可動マグネット型リニアモータを内蔵したスライド装置 | |
| US6348746B1 (en) | Slider unit with built-in moving-coil linear motor | |
| JP4886355B2 (ja) | 可動マグネット型リニアモータを内蔵したスライド装置 | |
| JP4521221B2 (ja) | 可動マグネット型リニアモータを内蔵したスライド装置 | |
| JP4702629B2 (ja) | ムービングマグネット形リニアスライダおよびそれを用いた工作機械 | |
| KR102022270B1 (ko) | 평면형 위치설정 장치 및 위치설정 테이블 | |
| US5416396A (en) | Linear encoder and a guide unit on which it is equipped | |
| JP5248150B2 (ja) | 可動コイル型リニアモータを内蔵したスライド装置 | |
| JP4684679B2 (ja) | リニアモータを内蔵したスライド装置 | |
| JPH0654516A (ja) | リニア直流モ−タ内へのリニア磁気エンコ−ダの組込み形成方法 | |
| JP7514098B2 (ja) | 昇降装置 | |
| JP3488845B2 (ja) | リニアモータ | |
| JP3488847B2 (ja) | リニアモータ | |
| JP5248149B2 (ja) | 可動コイル型リニアモータを内蔵したスライド装置 | |
| JP2004056872A (ja) | ホールセンサ付きリニアモータ | |
| JP2010110121A (ja) | リニアモータ | |
| JPH0739292U (ja) | リニア直流モ−タ | |
| JPH0739291U (ja) | リニア直流モ−タ | |
| JPH09238460A (ja) | 編針駆動用リニアモータ | |
| JPH0739294U (ja) | リニア直流モ−タ | |
| JPWO2007013289A1 (ja) | リニアモータ | |
| JPH0739293U (ja) | リニア直流モ−タ | |
| JP2009183073A (ja) | モータおよびロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060419 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100324 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100518 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100524 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130528 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4521221 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160528 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |