JP2010010221A - 基板の処理装置及び処理方法 - Google Patents
基板の処理装置及び処理方法 Download PDFInfo
- Publication number
- JP2010010221A JP2010010221A JP2008164876A JP2008164876A JP2010010221A JP 2010010221 A JP2010010221 A JP 2010010221A JP 2008164876 A JP2008164876 A JP 2008164876A JP 2008164876 A JP2008164876 A JP 2008164876A JP 2010010221 A JP2010010221 A JP 2010010221A
- Authority
- JP
- Japan
- Prior art keywords
- rotary table
- substrate
- balance weight
- centrifugal force
- turntable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Cleaning Or Drying Semiconductors (AREA)
Abstract
【解決手段】基板を回転させながら処理する処理装置であって、回転テーブル11と、回転テーブルを回転駆動するモータ8と、回転テーブルの上面に設けられた基板の下面を支持する支持ピン19及び基板の外面に係合する係合ピン20と、回転テーブルの下面に径方向に沿って位置決め可能に設けられ回転テーブルの回転速度が増大するにつれて径方向の外方に位置決めされて係合ピンの遠心力によって生じる回転テーブルの周辺部を下方へ撓ませる力を打ち消す力を発生するバランスウエイト24を具備する。
【選択図】 図1
Description
F=m・r・ω2
によって与えられる。
回転テーブルと、
この回転テーブルを回転駆動する駆動源と、
上記回転テーブルの上面に設けられた上記基板の下面を支持する支持部材及び上記基板の外面に係合する係合部材と、
上記回転テーブルの下面に径方向に沿って位置決め可能に設けられ上記回転テーブルの回転速度が増大するにつれて径方向の外方に位置決めされて上記係合部材の遠心力によって生じる上記回転テーブルの周辺部を下方へ撓ませる力を打ち消す力を発生するバランスウエイトと
を具備したことを特徴とする基板の処理装置にある。
上記バランスウエイトを上記回転テーブルの径方向に沿って弾性的に移動可能に保持し上記回転テーブルが回転して上記バランスウエイトに遠心力が生じたときにその遠心力によって弾性変形して上記バランスウエイトを上記リニアガイドに沿って上記回転テーブルの径方向の外方へ移動させる弾性保持手段と
を具備したことが好ましい。
上記回転テーブルの回転速度に応じて上記バランスウエイトを上記リニアガイドに沿って駆動して上記回転テーブルの径方向に沿う所定の位置に位置決めする駆動手段と
を具備したことが好ましい。
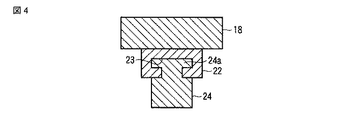
各アーム体の上面には上記支持部材と上記係合部材が設けられ、上記アーム体の下面には上記バランスウエイトが上記回転テーブルの回転速度に応じて径方向の所定の位置に位置決めされるよう設けられていることが好ましい。
基板の下面を支持する支持部材及び外面に係合する係合部材が設けられた回転テーブルに上記基板を保持して回転させる工程と、
上記回転テーブルの下面に設けられたバランスウエイトを回転テーブルの回転速度の増加に応じて径方向の外方に移動させ、上記回転テーブルの回転によって上記係合部材に発生する上記回転テーブルの周辺部を下方へ撓ませる遠心力を打ち消す遠心力を上記バランスウエイトによって生じさせる工程と
を具備したことを特徴とする基板の処理方法にある。
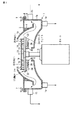
図1乃至図4はこの発明の第1の実施の形態を示し、図1に示す処理装置はカップ体1を備えている。このカップ体1は下カップ1aと上カップ1bを有する。この下カップ1aは上面が開放したお椀状に形成され、その底部中心部には通孔2が形成されていて、上端縁には受けフランジ3が設けられている。
図5はこの発明の第2の実施の形態を示し、この実施の形態はアーム体18の先端に連結部材25を設け、この連結部材25とバランスウエイト24との間に、回転テーブル11の回転によってバランスウエイト24に生じる遠心力でこのバランスウエイト24が回転テーブル11の径方向外方へ移動したときに圧縮されるばね26aを設けるようにした。
Claims (5)
- 基板を回転させながら処理する処理装置であって、
回転テーブルと、
この回転テーブルを回転駆動する駆動源と、
上記回転テーブルの上面に設けられた上記基板の下面を支持する支持部材及び上記基板の外面に係合する係合部材と、
上記回転テーブルの下面に径方向に沿って位置決め可能に設けられ上記回転テーブルの回転速度が増大するにつれて径方向の外方に位置決めされて上記係合部材の遠心力によって生じる上記回転テーブルの周辺部を下方へ撓ませる力を打ち消す力を発生するバランスウエイトと
を具備したことを特徴とする基板の処理装置。 - 上記回転テーブルの下面に設けられ上記バランスウエイトを径方向に沿って移動可能に支持したリニアガイドと、
上記バランスウエイトを上記回転テーブルの径方向に沿って弾性的に移動可能に保持し上記回転テーブルが回転して上記バランスウエイトに遠心力が生じたときにその遠心力によって弾性変形して上記バランスウエイトを上記リニアガイドに沿って上記回転テーブルの径方向の外方へ移動させる弾性保持手段と
を具備したことを特徴とする請求項1記載の基板の処理装置。 - 上記回転テーブルの下面に径方向に沿って設けられ上記バランスウエイトが移動可能に支持されるリニアガイドと、
上記回転テーブルの回転速度に応じて上記バランスウエイトを上記リニアガイドに沿って駆動して上記回転テーブルの径方向に沿う所定の位置に位置決めする駆動手段と
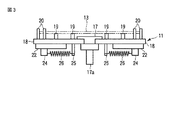
を具備したことを特徴とする請求項1記載の基板の処理装置。 - 上記回転テーブルは上記駆動源に連結される基部と、この基部に基端を連結して放射状に延出された複数のアーム体によって構成されていて、
各アーム体の上面には上記支持部材と上記係合部材が設けられ、上記アーム体の下面には上記バランスウエイトが上記回転テーブルの回転速度に応じて径方向の所定の位置に位置決めされるよう設けられていることを特徴とする請求項1記載の基板の処理装置。 - 基板を回転させながら処理する処理方法であって、
基板の下面を支持する支持部材及び外面に係合する係合部材が設けられた回転テーブルに上記基板を保持して回転させる工程と、
上記回転テーブルの下面に設けられたバランスウエイトを回転テーブルの回転速度の増加に応じて径方向の外方に移動させ、上記回転テーブルの回転によって上記係合部材に発生する上記回転テーブルの周辺部を下方へ撓ませる遠心力を打ち消す遠心力を上記バランスウエイトによって生じさせる工程と
を具備したことを特徴とする基板の処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164876A JP5274911B2 (ja) | 2008-06-24 | 2008-06-24 | 基板の処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164876A JP5274911B2 (ja) | 2008-06-24 | 2008-06-24 | 基板の処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010010221A true JP2010010221A (ja) | 2010-01-14 |
| JP5274911B2 JP5274911B2 (ja) | 2013-08-28 |
Family
ID=41590393
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008164876A Expired - Fee Related JP5274911B2 (ja) | 2008-06-24 | 2008-06-24 | 基板の処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5274911B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108091598A (zh) * | 2016-11-21 | 2018-05-29 | 东京毅力科创株式会社 | 基板处理装置 |
| CN110323159A (zh) * | 2018-03-30 | 2019-10-11 | 芝浦机械电子株式会社 | 基板处理装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63203943A (ja) * | 1987-02-18 | 1988-08-23 | Ricoh Co Ltd | 回転体の回転ムラ軽減装置 |
| JPH06244165A (ja) * | 1993-02-16 | 1994-09-02 | Hitachi Ltd | 回転処理装置 |
| JP2001221291A (ja) * | 2000-02-04 | 2001-08-17 | Nippon Densan Corp | 回転バランス修正装置 |
-
2008
- 2008-06-24 JP JP2008164876A patent/JP5274911B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63203943A (ja) * | 1987-02-18 | 1988-08-23 | Ricoh Co Ltd | 回転体の回転ムラ軽減装置 |
| JPH06244165A (ja) * | 1993-02-16 | 1994-09-02 | Hitachi Ltd | 回転処理装置 |
| JP2001221291A (ja) * | 2000-02-04 | 2001-08-17 | Nippon Densan Corp | 回転バランス修正装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108091598A (zh) * | 2016-11-21 | 2018-05-29 | 东京毅力科创株式会社 | 基板处理装置 |
| CN108091598B (zh) * | 2016-11-21 | 2023-03-28 | 东京毅力科创株式会社 | 基板处理装置 |
| CN110323159A (zh) * | 2018-03-30 | 2019-10-11 | 芝浦机械电子株式会社 | 基板处理装置 |
| CN110323159B (zh) * | 2018-03-30 | 2023-02-03 | 芝浦机械电子株式会社 | 基板处理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5274911B2 (ja) | 2013-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100517633C (zh) | 旋转头及使用该旋转头的基底处理方法 | |
| US10204818B2 (en) | Device for holding and rotating plate shaped article | |
| KR20180018341A (ko) | 접합 장치 및 접합 시스템 | |
| JPH06291030A (ja) | 回転式基板処理装置用の基板回転保持装置 | |
| CN104701233A (zh) | 一种盘状物夹持装置 | |
| TW201631690A (zh) | 基板轉移裝置 | |
| CN103762196B (zh) | 盘状物的夹持装置及盘状物的旋转平台 | |
| JP5274911B2 (ja) | 基板の処理装置 | |
| JP4920643B2 (ja) | 液処理装置および液処理方法 | |
| JP7160872B2 (ja) | 基板処理装置およびその駆動方法 | |
| EP1233667B1 (en) | Electronic component mounting apparatus | |
| CN108231644B (zh) | 掩膜对准装置用基板升降装置 | |
| CN118943067B (zh) | 一种涂胶显影机晶圆定位装置 | |
| JP2009206288A (ja) | 薄型基板回転処理装置 | |
| JP2004079637A (ja) | 板状部材の把持装置、把持方法、及びスピン処理装置 | |
| JP3343012B2 (ja) | 回転式基板処理装置 | |
| JPH10135312A (ja) | 基板回転保持装置および回転式基板処理装置 | |
| CN111015502A (zh) | 一种定位装置 | |
| KR100857233B1 (ko) | 기판 스핀 장치 | |
| JPH1140655A (ja) | 基板回転保持装置および回転式基板処理装置 | |
| JP2000223395A (ja) | 半導体製造品の回転塗布装置、および半導体製造品の回転塗布方法 | |
| JPH11252875A (ja) | 電機子コイル巻線装置および方法 | |
| JP2001185522A (ja) | 矩形基板の処理装置 | |
| KR100855737B1 (ko) | 웨이퍼 스핀 척 | |
| JP2008141010A (ja) | 基板処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130515 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5274911 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |