JP2010142372A - ガイドチューブ、ガイドチューブ装置および内視鏡システム - Google Patents
ガイドチューブ、ガイドチューブ装置および内視鏡システム Download PDFInfo
- Publication number
- JP2010142372A JP2010142372A JP2008321481A JP2008321481A JP2010142372A JP 2010142372 A JP2010142372 A JP 2010142372A JP 2008321481 A JP2008321481 A JP 2008321481A JP 2008321481 A JP2008321481 A JP 2008321481A JP 2010142372 A JP2010142372 A JP 2010142372A
- Authority
- JP
- Japan
- Prior art keywords
- guide tube
- cilia
- tubular body
- vibration
- endoscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 210000004081 cilia Anatomy 0.000 claims abstract description 81
- 230000002093 peripheral effect Effects 0.000 claims abstract description 13
- 238000003780 insertion Methods 0.000 claims description 42
- 230000037431 insertion Effects 0.000 claims description 42
- 230000005540 biological transmission Effects 0.000 claims description 11
- 238000003384 imaging method Methods 0.000 claims description 7
- 238000004804 winding Methods 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 7
- 230000001886 ciliary effect Effects 0.000 description 6
- 239000002184 metal Substances 0.000 description 5
- 230000033001 locomotion Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000004677 Nylon Substances 0.000 description 1
- 239000002390 adhesive tape Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 229920001169 thermoplastic Polymers 0.000 description 1
- 239000004416 thermosoftening plastic Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00154—Holding or positioning arrangements using guiding arrangements for insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0055—Constructional details of insertion parts, e.g. vertebral elements
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Abstract
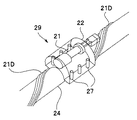
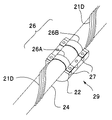
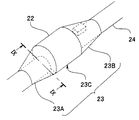
【解決手段】ガイドチューブ10は管体24と、管体24の外周部に設けられた、管体24の長手方向に傾斜した多数の繊毛31から構成された繊毛部30と、管体24に設けられた、管体24を長手方向に進めるように繊毛部30を振動する振動部29と、を有する。
【選択図】図2
Description
伊崎和也、他、第11回ロボティクスシンポジア講演論文集(繊毛移動機構によって駆動する能動索状体の開発)、日本、2006年3月16日、414頁−419頁。
以下、図面を参照して第1の実施の形態の内視鏡システム1、第1の実施の形態のガイドチューブ10、および、第1の実施の形態のガイドチューブ装置20について説明する。なお、以下、内視鏡システム、ガイドチューブ、およびガイドチューブ装置を内視鏡システム等という。
以下、本発明の第2の実施の形態の内視鏡システム等について説明する。本実施の形態の内視鏡システム1B等は第1の実施の形態の内視鏡システム1等と類似しているため、同じ構成要素には同じ符号を付し、説明は省略する。図13は本実施の形態の内視鏡システム1Bの構成を示した構成図である。
2…内視鏡装置
3…本体部
4…電源部
6…コネクタ
7…内視鏡操作部
8…挿入部
10…ガイドチューブ
12…振動操作部
13…スイッチ部
14…振動制御部
15…コネクタ
20…ガイドチューブ装置
21…振動モータ
22…モーターケース
23…段差低減部
24…管体
24A…挿通孔
26…固定治具
29…振動部
29A…ビス
30…繊毛部
30A…繊毛テープ
31、31A〜31C…繊毛
Claims (14)
- 管体と、
前記管体の外周部に設けられた、前記管体の長手方向に傾斜した多数の繊毛から構成された繊毛部と、
前記管体に設けられた、前記管体を前記長手方向に進めるように前記繊毛部を振動する振動部と、を有することを特徴とするガイドチューブ。 - 前記繊毛部が、前記振動部において前記管体と固定されていることを特徴とする請求項1に記載のガイドチューブ。
- 前記繊毛部が、固定部材により前記管体に固定されていることを特徴とする請求項2に記載のガイドチューブ。
- 前記繊毛部が、片面に繊毛を有する繊毛テープを前記管体に巻回することにより構成されていることを特徴とする請求項1から請求項3のいずれか1項に記載のガイドチューブ。
- 一部の前記振動部のみが選択的に駆動可能であることを特徴とする請求項1から請求項4のいずれか1項に記載のガイドチューブ。
- 前記振動部は複数設けられていることを特徴とする請求項1から請求項5のいずれか1項に記載のガイドチューブ。
- 前記振動部が、振動モータと、前記振動モータが収納された、内周部が前記管体と密着する形状のケースとを有することを特徴とする請求項1から請求項6のいずれか1項に記載のガイドチューブ。
- 前記ケースと前記管体表面との長手方向の段差を低減するための段差低減部を有することを特徴とする請求項7に記載のガイドチューブ。
- 前記ケースの外周部に設けられた前記繊毛部の前記繊毛の長さが、他の部分の前記繊毛より短いことを特徴とする請求項7または請求項8に記載のガイドチューブ。
- 前記先端部にマイクまたはスピーカを有することを特徴とする請求項1から請求項9のいずれか1項に記載のガイドチューブ。
- 前記管体が、先端部に撮像部が配設された内視鏡装置の挿入部が挿通可能な内径を有することを特徴とする請求項1から請求項10のいずれか1項に記載のガイドチューブ。
- 管体と、前記管体の外周部に設けられた、前記管体の長手方向に傾斜した多数の繊毛から構成された繊毛部と、前記管体に配設された、前記管体を前記長手方向に進めるように前記繊毛部を振動する振動部と、を有するガイドチューブと、
前記振動部を制御する振動制御部を操作する振動操作部と、
前記振動部の駆動電力を受電するための受電コネクタと、を具備することを特徴とするガイドチューブ装置。 - 前記管体が、先端部に撮像部が配設された内視鏡装置の挿入部が挿通可能な内径を有し、
前記振動操作部が前記内視鏡装置の内視鏡操作部に着脱可能な固定治具を有し、
前記受電コネクタが前記内視鏡装置の電源部から電力を送電するための送電コネクタと接続可能であることを特徴とする請求項12に記載のガイドチューブ装置。 - 先端部に撮像手段を有する挿入部と、前記挿入部の基端部側に配設された前記挿入部を操作する内視鏡操作部と、電源部が配設された本体部と、電源部から電力を送電するための送電コネクタとを有する内視鏡装置と、
前記挿入部が挿通可能な内径を有する管体と、前記管体の外周部に設けた、前記管体の長手方向に傾斜した多数の繊毛から構成された繊毛部と、前記管体に配設された、前記管体を前記長手方向に進めるように前記繊毛部を振動する振動部とを有するガイドチューブと、前記振動部を操作する、前記内視鏡操作部に着脱可能な振動操作部と、前記送電コネクタと接続可能な受電コネクタとを有するガイドチューブ装置と、を具備することを特徴とする内視鏡システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008321481A JP5389429B2 (ja) | 2008-12-17 | 2008-12-17 | ガイドチューブ、ガイドチューブ装置および内視鏡システム |
| US12/637,874 US8556799B2 (en) | 2008-12-17 | 2009-12-15 | Guide tube, guide tube apparatus, and endoscope system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008321481A JP5389429B2 (ja) | 2008-12-17 | 2008-12-17 | ガイドチューブ、ガイドチューブ装置および内視鏡システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010142372A true JP2010142372A (ja) | 2010-07-01 |
| JP5389429B2 JP5389429B2 (ja) | 2014-01-15 |
Family
ID=42241343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008321481A Expired - Fee Related JP5389429B2 (ja) | 2008-12-17 | 2008-12-17 | ガイドチューブ、ガイドチューブ装置および内視鏡システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8556799B2 (ja) |
| JP (1) | JP5389429B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013252260A (ja) * | 2012-06-06 | 2013-12-19 | Olympus Corp | 内視鏡装置 |
| JP2014157292A (ja) * | 2013-02-15 | 2014-08-28 | Toshiba Corp | 管内移動装置および管内移動装置挿入方法 |
| WO2016189724A1 (ja) * | 2015-05-28 | 2016-12-01 | オリンパス株式会社 | 可撓管挿入装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10509559B2 (en) | 2015-05-05 | 2019-12-17 | Massachusetts Institute Of Technology | Micro-pillar methods and apparatus |
| CN209673136U (zh) * | 2019-05-07 | 2019-11-22 | 深圳市华普森电子有限公司 | 高清智能一体化管道探测器 |
| DE102021103749A1 (de) | 2021-02-17 | 2022-08-18 | Lufthansa Technik Aktiengesellschaft | Zentrierungshilfe für Boroskope |
| US20230414253A1 (en) * | 2022-06-27 | 2023-12-28 | Covidien Lp | Devices, systems, and methods facilitating access to the uterus |
| NL2036368B1 (en) * | 2023-11-28 | 2025-06-04 | Univ Delft Tech | Medical device for intraluminal intervention |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04144533A (ja) * | 1990-10-05 | 1992-05-19 | Olympus Optical Co Ltd | 内視鏡 |
| JPH09201332A (ja) * | 1996-01-25 | 1997-08-05 | Olympus Optical Co Ltd | 内視鏡 |
| JP2002263054A (ja) * | 2001-03-13 | 2002-09-17 | Asahi Optical Co Ltd | 内視鏡用振動装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5779623A (en) * | 1993-10-08 | 1998-07-14 | Leonard Medical, Inc. | Positioner for medical instruments |
| US7064472B2 (en) * | 1999-07-20 | 2006-06-20 | Sri International | Electroactive polymer devices for moving fluid |
| JP4505345B2 (ja) * | 2004-03-31 | 2010-07-21 | オリンパス株式会社 | 内視鏡挿入補助用プローブ及びこれを適用する内視鏡装置 |
| US8092549B2 (en) * | 2004-09-24 | 2012-01-10 | The Invention Science Fund I, Llc | Ciliated stent-like-system |
| US7998060B2 (en) * | 2004-04-19 | 2011-08-16 | The Invention Science Fund I, Llc | Lumen-traveling delivery device |
| US20090012359A1 (en) * | 2005-03-28 | 2009-01-08 | Shinsuke Tanaka | Medical instrument insertion apparatus and medical instrument insertion apparatus system |
| US20070015965A1 (en) * | 2005-07-13 | 2007-01-18 | Usgi Medical Inc. | Methods and apparatus for colonic cleaning |
| JPWO2007077922A1 (ja) * | 2005-12-28 | 2009-06-11 | オリンパスメディカルシステムズ株式会社 | 被検体内導入システムおよび被検体内観察方法 |
| US8287446B2 (en) * | 2006-04-18 | 2012-10-16 | Avantis Medical Systems, Inc. | Vibratory device, endoscope having such a device, method for configuring an endoscope, and method of reducing looping of an endoscope |
-
2008
- 2008-12-17 JP JP2008321481A patent/JP5389429B2/ja not_active Expired - Fee Related
-
2009
- 2009-12-15 US US12/637,874 patent/US8556799B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04144533A (ja) * | 1990-10-05 | 1992-05-19 | Olympus Optical Co Ltd | 内視鏡 |
| JPH09201332A (ja) * | 1996-01-25 | 1997-08-05 | Olympus Optical Co Ltd | 内視鏡 |
| JP2002263054A (ja) * | 2001-03-13 | 2002-09-17 | Asahi Optical Co Ltd | 内視鏡用振動装置 |
Non-Patent Citations (1)
| Title |
|---|
| JPN6013032509; 新妻 翔(他4名): 'ファイバースコープのための振動駆動型繊毛移動機構の開発' 第23回 日本ロボット学会学術講演会予稿集 , 20050915, 1A23, 日本ロボット学会 * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013252260A (ja) * | 2012-06-06 | 2013-12-19 | Olympus Corp | 内視鏡装置 |
| JP2014157292A (ja) * | 2013-02-15 | 2014-08-28 | Toshiba Corp | 管内移動装置および管内移動装置挿入方法 |
| WO2016189724A1 (ja) * | 2015-05-28 | 2016-12-01 | オリンパス株式会社 | 可撓管挿入装置 |
| JPWO2016189724A1 (ja) * | 2015-05-28 | 2018-03-15 | オリンパス株式会社 | 可撓管挿入装置 |
| US10694926B2 (en) | 2015-05-28 | 2020-06-30 | Olympus Corporation | Flexible tube insertion apparatus having vibration actuator for reducing insertion force of endoscope insertion member |
Also Published As
| Publication number | Publication date |
|---|---|
| US8556799B2 (en) | 2013-10-15 |
| JP5389429B2 (ja) | 2014-01-15 |
| US20100152536A1 (en) | 2010-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5389429B2 (ja) | ガイドチューブ、ガイドチューブ装置および内視鏡システム | |
| US8287446B2 (en) | Vibratory device, endoscope having such a device, method for configuring an endoscope, and method of reducing looping of an endoscope | |
| JP4422571B2 (ja) | 内視鏡挿入補助装置 | |
| US9901370B2 (en) | Tube insertion device having end effector capable of changing direction | |
| JP2012029865A (ja) | 内視鏡装着具 | |
| JP2006149581A (ja) | カプセル型医療装置本体及びカプセル型医療システム | |
| CN105163645A (zh) | 插入装置 | |
| JP5294239B2 (ja) | 自走式ケーブル装置 | |
| JPH10248794A (ja) | 内視鏡システム | |
| JP6393382B2 (ja) | 医療装置 | |
| WO2008089770A1 (en) | Oscillating catheter | |
| JP2012200354A (ja) | 内視鏡用可撓管 | |
| JP6280633B2 (ja) | 摩擦駆動アクチュエータ | |
| JP2012191976A (ja) | 内視鏡用挿入補助装置 | |
| JP2015002861A (ja) | 内視鏡挿入部の剛性可変装置 | |
| JP2012050514A (ja) | 自己推進装置 | |
| JP2009039325A5 (ja) | ||
| JP4477332B2 (ja) | 携帯型内視鏡装置 | |
| US20160059292A1 (en) | Bending device | |
| JP2005066128A (ja) | 内視鏡 | |
| JP2005287102A (ja) | 線材・円筒状部材用自動走行ロボット | |
| JP2001161636A (ja) | 内視鏡装置 | |
| JP2012040239A (ja) | 自己推進装置 | |
| JP2020162858A (ja) | 画像診断装置、画像診断システム、画像診断用カテーテル及びプライミング方法 | |
| JP2005329080A (ja) | 内視鏡、回転アダプタ付き内視鏡及び内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130711 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131009 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5389429 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees | ||
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |