JP2012173152A - レーダ装置及びカーブ判定プログラム - Google Patents
レーダ装置及びカーブ判定プログラム Download PDFInfo
- Publication number
- JP2012173152A JP2012173152A JP2011035784A JP2011035784A JP2012173152A JP 2012173152 A JP2012173152 A JP 2012173152A JP 2011035784 A JP2011035784 A JP 2011035784A JP 2011035784 A JP2011035784 A JP 2011035784A JP 2012173152 A JP2012173152 A JP 2012173152A
- Authority
- JP
- Japan
- Prior art keywords
- curve
- road
- distance
- representative point
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000605 extraction Methods 0.000 claims abstract description 24
- 238000012545 processing Methods 0.000 claims description 99
- 230000006870 function Effects 0.000 claims description 45
- 238000000034 method Methods 0.000 claims description 22
- 239000000284 extract Substances 0.000 claims description 15
- 230000005484 gravity Effects 0.000 claims description 11
- 230000005540 biological transmission Effects 0.000 abstract description 13
- 238000010586 diagram Methods 0.000 description 22
- 238000001514 detection method Methods 0.000 description 19
- 238000004364 calculation method Methods 0.000 description 18
- 238000003860 storage Methods 0.000 description 16
- 238000009826 distribution Methods 0.000 description 10
- 230000000116 mitigating effect Effects 0.000 description 6
- 238000011144 upstream manufacturing Methods 0.000 description 6
- 102100024342 Contactin-2 Human genes 0.000 description 4
- 101000690440 Solanum lycopersicum Floral homeotic protein AGAMOUS Proteins 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 230000000630 rising effect Effects 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 3
- 230000035559 beat frequency Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images













Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ11〜1nと、受信された電波の方位毎に対象物と受信アンテナ11〜1nとの相対距離に対する受信された電波の強度の関数を算出するDBF処理部23と、受信された電波の方位毎にDBF処理部23により算出された関数から代表点を抽出する代表点抽出部と、代表点抽出部により抽出された前記受信された電波の方位毎の代表点の距離を比較することにより、前方がカーブしている道路であるか否かを判定するカーブ判定部と、を備える。
【選択図】図1
Description
上記レーダ装置によれば、前方がカーブしている道路であるか否かを判定することができるので、レーダ装置がカーブ道路外に存在する対象物を自レーダ装置が取り付けられた車両の走行軌跡上に存在すると誤認識することを防ぐことができる。
これによれば、カーブ判定部は前方が右カーブしている道路か左カーブしている道路かを判定することができるので、レーダ装置は、対象物がカーブ道路外にあるか否かを判定することができる。これにより、レーダ装置がカーブ道路外にある対象物を走行上にある障害物と誤認識することを防ぐことができる。
これによれば、DBF処理部により算出された関数から、移動物成分を除去することができるので、静止物のみを対象物として、その静止物がカーブの道路外にあるか否か判定することができる。これにより、静止物のみに対しカーブ道路外判定すれはよいので、演算量を減らすことができる。
これによれば、前方がカーブしている道路である場合において、対象物がカーブの道路外にあるか否か判定することができるので、レーダ装置がカーブ道路外に存在する対象物を自レーダ装置が取り付けられた車両の走行軌跡上に存在すると誤認識することを防ぐことができる。
これによれば、レーダ装置は、対象物がカーブの道路外にあるか否かを判定することができるので、カーブ道路外に存在する対象物を自レーダ装置が取り付けられた車両の走行軌跡上に存在すると誤認識することを防ぐことができる。
これによれば、レーダ装置は、カーブ道路外に存在する対象物をカーブ道路外と判定することができる。これにより、レーダ装置は、カーブ道路外に存在する対象物を自レーダ装置が取り付けられた車両の走行に障害となる物標からはずすことができるので、レーダ装置がその対象物を自レーダ装置が取り付けられた車両の走行軌跡上に存在すると誤認識することを防ぐことができる。
これによれば、代表点としてDBF処理部により算出された関数の重心を算出する際には、閾値を設定する必要がないので、必ず代表点として重心を抽出できるという利点がある。また、受信強度にノイズ成分が重畳しており、受信強度がピークをとる距離を正しく算出できないときであっても、代表点抽出部33は代表点を抽出することができる。これにより、前方がカーブしている道路であるか否かを、測定条件やノイズに対してロバストに判定することができる。
上記カーブ判定プログラムによれば、前方がカーブしている道路であるか否かを判定することができるので、レーダ装置がカーブ道路外に存在する対象物を自レーダ装置が取り付けられた車両の走行軌跡上に存在すると誤認識することを防ぐことができる。
同図において、本発明の実施形態におけるレーダ装置は、受信アンテナ11〜1n(nは正の整数)と、ミキサ21〜2n(nは正の整数)と、送信アンテナ3と、分配器4と、フィルタ51〜5n(nは正の整数)、SW(スイッチ)6と、ADC(A/Dコンバータ、受信波取得部)7と、制御部8と、三角波生成部9と、VCO(Voltage Controlled Oscillator)10と、信号処理部20とを備える。
受信アンテナ11〜1nは、送信波が対象物にて反射し、この対象物から到来する反射波、すなわち受信波を受信する。
ミキサ21〜2n各々は、送信アンテナ3から送信される送信波と、各受信アンテナ11〜1nそれぞれにおいて受信された受信波が増幅器により増幅された信号とを混合して、それぞれの周波数差に対応したビート信号を生成する。
分配器4は、VCO10からの周波数変調された送信信号を、上記ミキサ21〜2nおよび送信アンテナ3に分配する。
SW6は、制御部8から入力されるサンプリング信号に対応して、フィルタ51〜5n各々を通過した各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号を、順次切り替えて、ADC(受信波取得部)7に供給する。
信号処理部20内の記憶部21は、A/Dコンバータ7においてデジタル変換されたデジタル信号を各受信アンテナ11〜1nに対応したチャンネルごとに格納する。
なお、ビート信号の上り部分のピーク値、またはビート信号の上り部分のピーク値とビート信号の下り部分のピーク値の平均を信号レベルとして使用してもよい。
距離検出部24は、算出された対象物との距離Rを示す情報を物標引継ぎ処理部27と先行カーブ判別処理部28と不図示の外部装置とへ供給する。また、距離検出部24は、その対象物との距離を示す情報を記憶部21に保存する。
次に、図2を用いて、信号処理部20において用いられる、レーダ装置と対象物との距離、相対速度、角度(方位)を検出する原理について簡単に説明する。
移動物判定部31は、相対速度を示す情報と本実施形態のレーダ装置が取り付けられた車両(以後、自車と称する)の車速を示す情報とに基づいて、対象物が移動物であるか否か判定する。具体的には、例えば、移動物判定部31は、自車の車速をVxとすると、静止物の相対速度は−Vxとなるから、相対速度が−Vxとなるものを静止物と判定する。一方、移動物判定部31は、相対速度が−Vx以外の対象物を移動物と判定する。
なお、代表点抽出部33は、代表点として受信強度のピークを抽出してもよい。
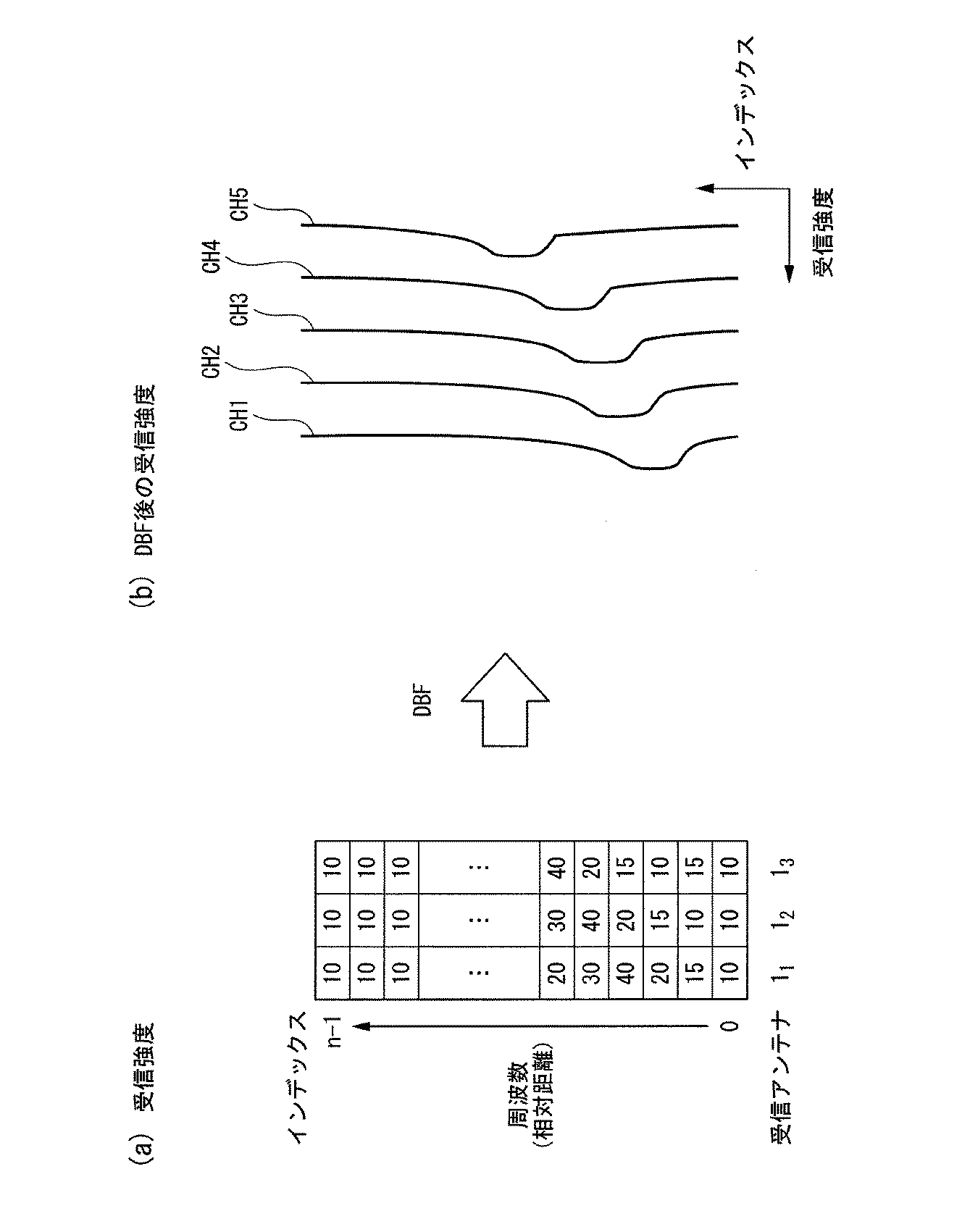
レーダ検知範囲内に先行車や反対車線を走行する対向車などの移動物が検出された場合には、チャンネル間における受信強度分布の重心における相対距離の関係が崩れることがある。
本実施形態では、カーブ判定部34が、前方がカーブしている道路であるか否か判定する際に、静止物成分のみにするため、移動物成分除去部32は移動物成分を除去する。
なお、移動物成分除去部32は、処理負荷を軽減する場合には、上り変調周波数fu、下り変調周波数fdのそれぞれから前後所定の周波数範囲を除去してもよい。
代表点抽出部33は、図9に示すようなチャンネル毎に受信強度分布の重心を代表点として抽出する。そして、代表点抽出部33は、抽出したチャンネル毎の重心の相対距離の大小関係を比較し、a<b<c<d<eであれば右カーブ、逆に、a>b>c>d>eであれば左カーブと判定する。
また、受信強度にノイズ成分が重畳しており、受信強度がピークをとる距離を正しく算出できないときであっても、代表点抽出部33は代表点を抽出することができる。これにより、前方がカーブしている道路であるか否かを、測定条件やノイズに対してロバストに判定することができる。
なお、カーブ道路外判定部35は、相対距離cを中心にして前後所定の範囲をカーブ道路外と判定してもよい。
まず、移動物判定部31は、物標が静止物のみか否か判定する(ステップS201)。物標が静止物のみの場合(ステップS201 YES)、ステップS203の処理に進む。物標が移動物を含む場合(ステップS201 NO)、DBF処理後の各チャンネルの受信強度と相対距離の関係から移動物成分を除去する(ステップS202)。
ステップS209において、カーブ道路外判定部35は、各対象物がカーブ道路外に存在するか否か判定する(ステップS209)。
21、2n ミキサ
3 送信アンテナ
4 分配器
51、5n フィルタ
6 SW
7 ADC(受信波取得部)
8 制御部
9 三角波生成部
10 VOC
20 信号処理部
21 記憶部
22 受信強度算出部
23 DBF処理部
24 距離検出部
25 速度検出部
26 方位検出部
27 物標引継ぎ処理部
28 先行カーブ判別処理部
29 物標出力処理部
31 移動物判定部
32 移動物成分除去部
33 代表点抽出部
34 カーブ判定部
35 カーブ道路外判定部
Claims (8)
- 電波を送信する送信アンテナと、
前記送信された電波が対象物により反射された電波を受信する複数の受信アンテナと、
前記受信された電波の方位毎に前記対象物と受信アンテナとの相対距離に対する前記受信された電波の強度の関数を算出するDBF処理部と、
前記受信された電波の方位毎に前記DBF処理部により算出された関数から代表点を抽出する代表点抽出部と、
前記代表点抽出部により抽出された前記受信された電波の方位毎の代表点の距離を比較することにより、前方がカーブしている道路であるか否かを判定するカーブ判定部と、
を備えることを特徴とするレーダ装置。 - 前記カーブ判定部は、前記受信された電波の方位毎の代表点の距離が前記対象物を正面にして左側の受信アンテナから右側の受信アンテナの順に遠くなっていれば、前方が右カーブしている道路であると判定し、前記受信された電波の方位毎の代表点の距離が前記対象物を正面にして左側の受信アンテナから右側の受信アンテナの順に近くなっていれば、前方が左カーブしている道路であると判定することを特徴とする請求項1に記載のレーダ装置。
- 自レーダ装置を基準とした前記対象物の相対速度を検出する速度検出部と、
前記検出された相対速度と、自レーダ装置が取り付けられた車両の速度とに基づいて、前記対象物が移動物であるか否か判定する移動物判定部と、
前記対象物が移動物と判定された場合、前記DBF処理部により算出された関数から、移動物成分を除去する移動物成分除去部と、
を備えることを特徴とする請求項1または請求項2に記載のレーダ装置。 - 前記DBF処理部により算出された関数に基づいて、前記対象物が前記カーブの道路外にあるか否か判定するカーブ道路外判定部を更に備えることを特徴とする請求項1から請求項3のいずれか1項に記載のレーダ装置。
- 前記受信された電波の強度に基づいて、前記対象物と前記受信アンテナとの前記相対距離を検出する距離検出部と、
前記DBF処理部により算出された関数に基づいて、前記対象物の方位を検出する方位検出部と、
を備え、
前記カーブ道路外判定部は、前記DBF処理部により算出された方位毎の関数のうち前記対象物の方位の関数を抽出し、抽出された関数における代表点の距離と、前記検出された相対距離とに基づいて、前記対象物が前記カーブの道路外にあるか否か判定することを特徴とする請求項1から請求項4のいずれか1項に記載のレーダ装置。 - 前記カーブ道路外判定部は、前記検出された相対距離が、前記抽出された関数における代表点に対応する距離に基づく距離に基づいて、前記対象物をカーブ道路外にあるか否か判定することを特徴とする請求項5に記載のレーダ装置。
- 前記代表点は、前記DBF処理部により算出された関数の重心であることを特徴とする請求項1から請求項6のいずれか1項に記載のレーダ装置。
- 受信された電波の方位毎に対象物と受信アンテナとの相対距離に対する受信された電波の強度の関数を算出する第1のステップと、
前記受信された電波の方位毎に前記第1のステップにより算出された関数から代表点を抽出する第2のステップと、
前記代表点抽出部により抽出された前記受信された電波の方位毎の代表点の距離を比較することにより、前方がカーブしている道路であるか否かを判定する第3のステップと、
をコンピュータに実行させるためのカーブ判定プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011035784A JP2012173152A (ja) | 2011-02-22 | 2011-02-22 | レーダ装置及びカーブ判定プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011035784A JP2012173152A (ja) | 2011-02-22 | 2011-02-22 | レーダ装置及びカーブ判定プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012173152A true JP2012173152A (ja) | 2012-09-10 |
Family
ID=46976188
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011035784A Pending JP2012173152A (ja) | 2011-02-22 | 2011-02-22 | レーダ装置及びカーブ判定プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012173152A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014147859A1 (ja) * | 2013-03-19 | 2014-09-25 | 三菱電機株式会社 | レーダ装置 |
| JP2014199221A (ja) * | 2013-03-29 | 2014-10-23 | 富士通株式会社 | レーダ装置及びプログラム |
| KR20150001393A (ko) * | 2013-06-27 | 2015-01-06 | 주식회사 만도 | 레이더 배열 안테나 빔 감지 장치 및 방법 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05159199A (ja) * | 1991-12-10 | 1993-06-25 | Nissan Motor Co Ltd | 接近検知装置 |
| JPH05232214A (ja) * | 1992-02-21 | 1993-09-07 | Fujitsu Ten Ltd | Fm−cwレーダ装置 |
| JPH07128440A (ja) * | 1993-11-05 | 1995-05-19 | Honda Motor Co Ltd | レーダ装置 |
| JPH1164502A (ja) * | 1997-08-22 | 1999-03-05 | Mitsubishi Electric Corp | 障害物検出レーダ装置 |
| JPH11211811A (ja) * | 1998-01-26 | 1999-08-06 | Honda Motor Co Ltd | レーダ装置 |
| JP2001141824A (ja) * | 1999-11-09 | 2001-05-25 | Calsonic Kansei Corp | 道路形状抽出装置 |
| JP2003139854A (ja) * | 2001-11-01 | 2003-05-14 | Nissan Motor Co Ltd | 先行車検出装置 |
| JP2009271008A (ja) * | 2008-05-09 | 2009-11-19 | Honda Motor Co Ltd | 物体検知装置 |
-
2011
- 2011-02-22 JP JP2011035784A patent/JP2012173152A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05159199A (ja) * | 1991-12-10 | 1993-06-25 | Nissan Motor Co Ltd | 接近検知装置 |
| JPH05232214A (ja) * | 1992-02-21 | 1993-09-07 | Fujitsu Ten Ltd | Fm−cwレーダ装置 |
| JPH07128440A (ja) * | 1993-11-05 | 1995-05-19 | Honda Motor Co Ltd | レーダ装置 |
| JPH1164502A (ja) * | 1997-08-22 | 1999-03-05 | Mitsubishi Electric Corp | 障害物検出レーダ装置 |
| JPH11211811A (ja) * | 1998-01-26 | 1999-08-06 | Honda Motor Co Ltd | レーダ装置 |
| JP2001141824A (ja) * | 1999-11-09 | 2001-05-25 | Calsonic Kansei Corp | 道路形状抽出装置 |
| JP2003139854A (ja) * | 2001-11-01 | 2003-05-14 | Nissan Motor Co Ltd | 先行車検出装置 |
| JP2009271008A (ja) * | 2008-05-09 | 2009-11-19 | Honda Motor Co Ltd | 物体検知装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014147859A1 (ja) * | 2013-03-19 | 2014-09-25 | 三菱電機株式会社 | レーダ装置 |
| CN105190350A (zh) * | 2013-03-19 | 2015-12-23 | 三菱电机株式会社 | 雷达装置 |
| JPWO2014147859A1 (ja) * | 2013-03-19 | 2017-02-16 | 三菱電機株式会社 | レーダ装置 |
| JP2014199221A (ja) * | 2013-03-29 | 2014-10-23 | 富士通株式会社 | レーダ装置及びプログラム |
| KR20150001393A (ko) * | 2013-06-27 | 2015-01-06 | 주식회사 만도 | 레이더 배열 안테나 빔 감지 장치 및 방법 |
| KR101938898B1 (ko) * | 2013-06-27 | 2019-04-10 | 주식회사 만도 | 레이더 배열 안테나 빔 감지 장치 및 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9354299B2 (en) | Radar apparatus and signal processing method | |
| JP6092596B2 (ja) | レーダ装置、および、信号処理方法 | |
| JP6170704B2 (ja) | レーダ装置、および、信号処理方法 | |
| CN103323834B (zh) | 雷达装置、及信号处理方法 | |
| JP6788388B2 (ja) | レーダ装置及びレーダ装置の制御方法 | |
| US10712429B2 (en) | Radar device and signal processing method | |
| JP6260483B2 (ja) | 物標検出装置 | |
| JP6701983B2 (ja) | 物標検出装置 | |
| JP2013050322A (ja) | 移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム | |
| JPWO2011092814A1 (ja) | 障害物検出装置 | |
| JP4281632B2 (ja) | 物標検出装置 | |
| JP5184196B2 (ja) | レーダ装置、レーダ装置の信号処理方法及び、車両制御システム | |
| JP2011117896A (ja) | 電子走査型レーダ装置及びコンピュータプログラム | |
| US20150234041A1 (en) | Radar apparatus | |
| JP6231803B2 (ja) | レーダ装置、及び、信号処理方法 | |
| KR101752651B1 (ko) | 레이더 시스템의 클러터 제거 및 다중 표적 추적방법 | |
| US10698105B2 (en) | Radar device and peak processing method | |
| JP2009103565A (ja) | 測定装置および方法 | |
| JP2004198438A (ja) | 車載レーダ装置 | |
| JP5637706B2 (ja) | レーダ装置及びコンピュータプログラム | |
| JP2013053946A (ja) | レーダ装置 | |
| JP7045648B2 (ja) | 車両の物体検出装置 | |
| JP2018115930A (ja) | レーダ装置および物標検出方法 | |
| JP2018080938A (ja) | レーダ装置および物標検知方法 | |
| JP2012173152A (ja) | レーダ装置及びカーブ判定プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140129 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20140130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141007 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150303 |