JP2012185032A - 変位センサ - Google Patents
変位センサ Download PDFInfo
- Publication number
- JP2012185032A JP2012185032A JP2011048173A JP2011048173A JP2012185032A JP 2012185032 A JP2012185032 A JP 2012185032A JP 2011048173 A JP2011048173 A JP 2011048173A JP 2011048173 A JP2011048173 A JP 2011048173A JP 2012185032 A JP2012185032 A JP 2012185032A
- Authority
- JP
- Japan
- Prior art keywords
- coil
- sensor
- sensor coil
- current
- displacement sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【解決手段】二つのコイルに矩形波電圧を印加して、各々のコイルに流れる電流を独立して検出してから差動回路等で差を演算するのではなく、直接電流の差の値を検出することにより、S/N比が良好であり高感度な変位センサを実現できる。また、各々のコイルは同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
【選択図】図3
Description
より詳細には、高感度且つ安定した検出性能を実現する変位センサに関する。
図16は特許文献1に開示されている、変位センサの検出回路の回路図である。
コイルA及びコイルBには、トランス1602を介して矩形波発生器の矩形波が印加される。
コイルAに流れる電流は、ダイオードD1603を通じてコンデンサC1604に流れ、コンデンサC1604には電荷が蓄積される。コイルAとコンデンサC1604との間のダイオードD1603は、コイルからコンデンサに流れる電流を片方向に制限する。ダイオードD1603に電流が流れない期間では、コンデンサC1604に蓄積された電荷は、コンデンサC1604に並列接続されている抵抗R1605によって放電される。したがって、コンデンサC1604の両端(端子1610Bと端子1610Cとの間)には鋸歯状波が得られる。
端子1610Aと端子1610Bから得られる信号を図示しない差動増幅回路で差動増幅すると、直流電圧が得られる。この直流電圧は、コイルA及びコイルBのインダクタンスに応じて変化する。
コイルA及びコイルBのそれぞれに同じ検出回路が接続され、同相の鋸歯状波が検出され、筒が被さった方の検出出力が小さくなる。両方の検出出力信号を差動増幅器で差動増幅すると、検出コイルのインダクタンスの変化に基づいて、出力電圧が変化する。
そこで、出願人および発明者は、プローブの機械強度を上げるため、プローブの外殻を金属製に代える検討を始めた。
しかし、変位センサがコイルのインダクタンスの変化を検出する仕組みであるが故に、プローブの外殻を金属製にすると、外殻に渦電流に起因する損失が発生し、位置検出感度が著しく低下する。
更に、図16に開示する、従来技術の変位センサの回路構成では、検出感度を上昇させるためにコイルに流す電流を大きくしても、渦電流損失ばかり大きくなり、感度の向上に殆ど寄与しないことが判った。
また、各々のコイルは同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
第一の実施形態及び第二の実施形態にて開示する変位センサは、二つのコイルを用いて、基準点から正負方向に移動体が変位した際の変位量を正負両極性のアナログ信号として出力する。
第三の実施形態、第四の実施形態及び第五の実施形態にて開示する近接センサは、二つのコイルを用いて、変位センサと同じ動作原理にて非磁性体金属及び/又は磁性体がセンサコイルに近接したことをデジタルの論理信号として出力する。
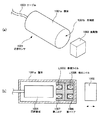
図1は、本発明の第一の実施形態に係る変位センサの外観斜視図である。
変位センサ101は、センサ本体部102とスリーブ103の組み合わせよりなる。
センサ本体部102は、検出回路を内蔵する筐体105の一端に、円筒形状のプローブ104が取り付けられている。
筐体105には、センサ本体部102を任意の物品に固定するための取り付け穴105a及び105bが設けられている。
プローブ104には後述する検出コイルである第一センサコイルL201及び第二センサコイルL202が内蔵されている。このプローブ104に、真鍮製の筒であるスリーブ103が挿入される。
スリーブ103がプローブ104を左右に移動すると、センサ本体部102は、プローブ104に対するスリーブ103の位置に応じた、アナログの検出信号を出力する。
図2(a)は、変位センサ101を横から見た状態で、スリーブ103とプローブ104について断面形状を示す一部断面図である。
プローブ104の外殻104aは剛性を向上させるために、本出願人の従来製品の樹脂モールドではなく、非磁性体であるオーステナイト系のステンレスで形成され、検出コイルである第一センサコイルL201及び第二センサコイルL202を内蔵する。
なお、プローブ104の外殻104aの材質は、必ずしもステンレスに限られないが、一定の条件が求められる。前述のように、非磁性体金属であることと、抵抗率が高いことである。抵抗率は、スリーブ103の抵抗率より高いことが好ましい。本実施形態の場合はスリーブ103の材質である真鍮(黄銅)が5〜7×10-8nΩmであるのに対し、ステンレスは7.2×10-7nΩmなので、この条件を満たす。
スリーブ103の長さは、第一センサコイルL201及び第二センサコイルL202の長さと同一か、やや長い。
図2(b)はコイルの回路図である。第一センサコイルL201及び第二センサコイルL202は、一端が接続され、三つの端子が設けられている。
図3は、変位センサ101のブロック図である。図3のブロック図は、第一の実施形態に係る変位センサ101と、後述する第二の実施形態に係る変位センサの、上位概念を示す。
矩形波電圧源301は、第一センサコイルL201及び第二センサコイルL202に夫々矩形波の交流電圧を印加する。電流差検出部302は、第一センサコイルL201及び第二センサコイルL202に流れる電流の差を検出し、電流の差に応じた電圧信号を出力する。電流差検出部302は交流の検出信号を出力するので、これを直流にするため、反転増幅回路303と電圧検出部304を用いて、直流の変位検出信号を生成する。
図4は、変位センサ101の回路図である。
第一矩形波電圧源401と第二矩形波電圧源402は、シーケンサ403の制御に基づいて、同じ電圧且つ相互に逆位相の矩形波電圧を生成する。
第一矩形波電圧源401の一端には第一センサコイルL201が接続され、第二矩形波電圧源402の一端には第二センサコイルL202が接続されている。第一矩形波電圧源401の他端と第二矩形波電圧源402の他端は接地されている。
第一センサコイルL201と第二センサコイルL202の接続中点には、オペアンプ404の反転入力端子が接続される。オペアンプ404の非反転入力端子は接地され、オペアンプ404の反転入力端子と出力端子との間には、帰還抵抗である抵抗R405が接続されている。オペアンプ404と抵抗R405は、周知の電流電圧変換回路を構成する。
アナログスイッチ409の出力端子には、抵抗R410が接続され、抵抗R410の他端にはコンデンサC411が接続される。コンデンサC411の他端は接地される。抵抗R405とコンデンサC411は周知の積分器を構成するので、脈流の信号から交流成分が除去され、出力端子から直流信号が出力される。
図5(a)、(b)、(c)、(d)、(e)及び(f)は、図4に示した変位センサ101の、各部の信号波形図である。
図5(a)は、第一矩形波電圧源401の電圧波形である。
図5(b)は、第二矩形波電圧源402の電圧波形である。
図5(c)は、シーケンサ403からアナログスイッチ409に与えられる制御信号の波形である。
図5(d)は、第一センサコイルL201及び第二センサコイルL202の電流波形である。
図5(e)は、オペアンプ404の出力端子及びオペアンプ404の出力端子の電圧波形である。
図5(f)は、アナログスイッチ409の出力信号波形である。
なお、図5(a)、(b)、(c)、(d)、(e)及び(f)は、横軸が同一の時間軸である。
第一センサコイルL201と第二センサコイルL202の接続中点は、周知のオペアンプ404のイマジナルショートによって仮想的な接地状態になっている。
オペアンプ404は、第一センサコイルL201に流れる電流I421と、第二センサコイルL202に流れる電流I422の差(I421−I422)が抵抗R405に流れるように動作する。したがって、オペアンプ404の出力端子には電流差に比例した電圧(図5(e)のE423)が出力される。
そして、図5(e)の電流差信号E423を、反転増幅回路303で反転させた信号(反転信号E424)と共にアナログスイッチ409によって同期整流を行うことで、図5(f)に示すように全波整流(全波整流信号E425)を実現する。
E423=−R405(I421−I422)
オペアンプ404の出力端子の電圧である反転信号E424は以下の式で表せられる。
E424=−E423
以上より、アナログスイッチ409、抵抗R410及びコンデンサC411で構成される同期整流回路は、電流差信号E423の振幅に比例した直流電圧を出力する。
図6(b)は、スリーブ103がプローブ104の中心に位置している時の、オペアンプ404の出力端子及びオペアンプ404の出力端子の電圧波形である。
図6(c)は、スリーブ103がプローブ104の中心に位置している時の、アナログスイッチ409の出力信号波形である。
スリーブ103が第一センサコイルL201及び第二センサコイルL202の中心にある時は、夫々のコイルにスリーブ103が均等に作用するので、第一センサコイルL201及び第二センサコイルL202のインダクタンスは同じである。このため、電流差信号E423の電圧はゼロになり、よってアナログスイッチ409の出力電圧である全波整流信号E425もゼロになる。
図6(e)は、スリーブ103がプローブ104の第一センサコイルL201側に位置している時の、オペアンプ404の出力端子及びオペアンプ404の出力端子の電圧波形である。
図6(f)は、スリーブ103がプローブ104の第一センサコイルL201側に位置している時の、アナログスイッチ409の出力信号波形である。
スリーブ103が第一センサコイルL201の側に位置している時は、第一センサコイルL201のインダクタンスは第二センサコイルL202のインダクタンスより小さくなる。
このため、第一センサコイルL201は電流が流れやすくなるので、第一センサコイルL201の電流波形の振幅は第二センサコイルL202の電流波形の振幅より大きくなる。この状態で同期整流を行うと、第一の実施形態の場合、全波整流信号E425の電圧は正方向に現れる。
図6(h)は、スリーブ103がプローブ104の第二センサコイルL202側に位置している時の、オペアンプ404の出力端子及びオペアンプ404の出力端子の電圧波形である。
図6(i)は、スリーブ103がプローブ104の第二センサコイルL202側に位置している時の、アナログスイッチ409の出力信号波形である。
スリーブ103が第二センサコイルL202の側に位置している時は、第二センサコイルL202のインダクタンスは第一センサコイルL201のインダクタンスより小さくなる。
このため、第二センサコイルL202は電流が流れやすくなるので、第二センサコイルL202の電流波形の振幅は第一センサコイルL201の電流波形の振幅より大きくなる。この状態で同期整流を行うと、第一の実施形態の場合、全波整流信号E425の電圧は負方向に現れる。
本実施形態に係る変位センサ101は、以下のような応用例が考えられる。
(1)第一矩形波電圧源401と第二矩形波電圧源402の出力電圧を個別に調整できるように構成すると、第一センサコイルL201及び第二センサコイルL202の相互のインダクタンスのばらつきから生じるオフセット電圧をキャンセルできるように、変位センサ101を構成することができる。
(2)第一の実施形態に係る変位センサ101は、第一矩形波電圧源401と第二矩形波電圧源402の、二つの矩形波電圧源を用いているが、トランスを利用することで、単一の矩形波電圧源で変位センサ101を実現することができる。
図7(a)は、変位センサ101の応用例を示す、矩形波電圧源と第一センサコイルL201及び第二センサコイルL202の回路図である。
点線枠で示す変位検出部701は、図4に示す変位センサ101の変位検出部412を置換する。トランス702の二次側巻線は、第一矩形波電圧源401及び第二矩形波電圧源402と実質的に等価である。
図7(b)は、変位センサ101の応用例を示す、サンプルホールド回路の回路図である。
モノマルチ704にはシーケンサ403から出力される第一矩形波電圧源401の制御信号を、モノマルチ705にはシーケンサ403から出力される第二矩形波電圧源402の制御信号を、それぞれ入力する。周知のとおり、モノマルチは入力信号のアップエッジ或はダウンエッジに呼応して、所定の時間幅のパルス信号を出力する。
モノマルチ704が出力するパルス信号でスイッチ706をオン・オフ制御すると、電流差信号E423のピーク電圧をコンデンサC707でサンプルし、ボルテージフォロワを構成するオペアンプ708で電圧信号を得ることができる。同様に、モノマルチ705が出力するパルス信号でスイッチ710をオン・オフ制御すると、反転信号E424のピーク電圧をコンデンサC711でサンプルし、ボルテージフォロワを構成するオペアンプ712で電圧信号を得ることができる。
なお、サンプルホールド回路を採用する場合、積分回路は不要になる。
前述の通り、プローブ104に対するスリーブ103の変位は、第一センサコイルL201及び第二センサコイルL202のインダクタンスを変化させる。そして、インダクタンスの変化は第一センサコイルL201と第二センサコイルL202の夫々に流れる電流の、ピーク電流値の変化として現れる。変位センサ101は、ピーク電流値の差からスリーブ103の変位を検出している。
ピーク電流値の差を大きくするには、二通りの方法がある。一つは、パルス電圧を大きくすることであり、もうひとつはパルス電圧のパルス周期を大きくすることである。後者の場合、図5(d)にて明らかなように、電流値は時間の一次関数で増加することに起因する。
もし、パルス電圧を大きくすると、ステンレス製の外殻104aに発生する渦電流が大きくなる。すると、渦電流に基づく損失が大きくなり、消費電流が増大し、発熱する。
また、この現象はトランスに置き換えて説明することもできる。第一センサコイルL201及び第二センサコイルL202に対して、ステンレス製の外殻104aは、トランスの一時コイルと1ターンの二次コイルの関係に相当する。このため、第一センサコイルL201及び第二センサコイルL202の電流を増やすために第一矩形波電圧源401及び第二矩形波電圧源402の電圧を大きくすると、二次コイルに相当する外殻104aに誘起する電圧も大きくなり、短絡電流が増加する。
つまり、外殻104aをステンレス製にしたことで、パルス電圧を大きくすることは消費電力をいたずらに増大させるばかりで、変位センサ101の感度上昇には殆ど寄与しない。
以上のことから、パルス電圧はなるべく低く押さえて、その代わりにパルス周期を大きく取ることでピーク電流を大きくすることが、変位センサ101の感度上昇に効果がある。
コイルを有する交流回路の電力消費は、フェライトコアの場合、巻線抵抗によるジュール熱が支配的である。例えば、ピーク電流値が50mAであっても、巻線抵抗が数Ωの場合、消費電流は1mA以下である。したがって、検出感度を上げるためにピーク電流を増大させても、消費電流に与える影響は少ない。
仮に、個々のコイルの電流を検出する場合は、その回路にはピーク電流値に対応したダイナミックレンジが求められる。言い換えると、大きなオフセット値を持った信号の中から僅かな変化(電流差)を求めるような回路構成になってしまう。このような回路構成の場合、出力信号のS/N比は低下する。
第一の実施形態に係る変位センサ101の場合、直接電流差のみを検出しているので、S/N比は良好であり高感度である。
また、第一センサコイルL201及び第二センサコイルL202は同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
図8は、本発明の第二の実施形態に係る変位センサ801の回路図である。
図8の変位センサ801の、図4に開示した本発明の第一の実施形態に係る変位センサ101との相違点は、一つの矩形波電圧源802がカレントトランス803に接続され、更にカレントトランス803に第一センサコイルL201及び第二センサコイルL202が接続されている点である。オペアンプ404以降の回路構成は図4の変位センサ101と同一であるので、同一の回路素子には同一の符号を付して説明を省略する。
矩形波電圧源802の一端は接地されており、他端はカレントトランス803の第一巻線の上流側端子と、第二巻線の下流側端子に接続されている。カレントトランス803の第一巻線と第二巻線の巻線数は同じである。
カレントトランス803の第一巻線の下流側端子には、第一センサコイルL201の一端が接続されている。
同様に、カレントトランス803の第二巻線の上流側端子には、第二センサコイルL202の一端が接続されている。
第一センサコイルL201及び第二センサコイルL202の他端は夫々接地されている。
カレントトランス803の第三巻線の上流側端子及び下流側端子は、夫々オペアンプ404の反転入力端子と非反転入力端子に接続される。
カレントトランス803の第三巻線に接続されるオペアンプ404は、図4と同様、電流電圧変換回路を構成する。
図9(a)、(b)、(c)、(d)及び(e)は、変位センサ801の各部の信号波形図である。
図9(a)は、矩形波電圧源802の電圧波形である。これは図5(a)と等しい。
図9(b)は、シーケンサ804からアナログスイッチ409に与えられる制御信号の波形である。これは図5(c)と等しい。
図9(c)は、第一センサコイルL201及び第二センサコイルL202の電流波形である。これは図5(d)と等しい。
図9(d)は、オペアンプ404の出力端子及びオペアンプ404の出力端子の電圧波形である。これは図5(e)と等しい。
図9(e)は、アナログスイッチ409の出力信号波形である。これは図5(f)と等しい。
同様に、矩形波電圧源802が生成する矩形波の交流電圧は、カレントトランス803の第二巻線を通じて第二センサコイルL202に印加される。
矩形波電圧源802はカレントトランス803の第一巻線と第二巻線には逆位相に接続されているので、第一センサコイルL201と第二センサコイルL202の電流差が第三巻線に現れる。
これ以降は、図5の説明と同等であるので割愛する。
第二の実施形態に係る変位センサ801は、カレントトランス803を採用することで第一センサコイルL201及び第二センサコイルL202の一端を接地すると同時に、電流電圧変換回路を構成するオペアンプ404の入力端子を第一センサコイルL201及び第二センサコイルL202から絶縁した。
第一の実施形態に係る変位センサ101の場合、第一センサコイルL201及び第二センサコイルL202は接地されていないので、仮に第一センサコイルL201及び第二センサコイルL202と回路の間を接続コードで延長すると、外来ノイズの影響を受けやすくなる。
一方、第二の実施形態に係る変位センサ801は、第一センサコイルL201及び第二センサコイルL202の一端が接地されているので、ノイズに強くなる。したがって、回路から第一センサコイルL201及び第二センサコイルL202を延長コードで離す構成の変位センサ101を実現するに適している。
本実施形態に係る変位センサ801は、以下のような応用例が考えられる。
(1)第二の実施形態に係る変位センサ801も、第一の実施形態に係る変位センサ101と同様に、図7(b)のサンプルホールド回路を採用することができる。この場合、一方のモノマルチ704には、他方のモノマルチ704に入力される、シーケンサ804から出力される矩形波電圧源の制御信号をNOTゲートで反転させた信号を入力する。
第一及び第二の実施形態では、変位センサ101及び変位センサ801を開示した。変位センサ101は、第一センサコイルL201及び第二センサコイルL202に被さる金属製のスリーブ103の、被さる長さに応じたアナログ電圧信号を出力する仕様である。
今、この変位センサ101のプローブ104からスリーブ103を抜き取り、第一センサコイルL201及び第二センサコイルL202のうち一方のコイルにのみスリーブ103を被せると、同様のアナログ電圧信号を得ることができる。ここで、コイル及びヨークの形状を工夫して、金属物がコイルに近接したことに呼応してインダクタンスが変化するように構成すると、コイルに対する金属物の近接状態を信号として得ることができる。そして、この信号をコンパレータで二値化すれば、コイルに対する金属物の所定距離以内の近接状態を論理値として得ることができる。
つまり、変位センサ101のアナログ電圧信号を二値化することで、容易に金属物の存在を検出する近接センサに応用することができる。
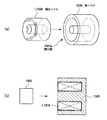
近接センサ1001は、円筒形状でオーステナイト系ステンレス製の筐体1001aに収納され、その先端部分1001bに金属物1002が近接すると、ケーブル1003を通じて所定の論理信号を出力する。
筐体1001aの内部には、回路基板1004と、フェライト製の第一コア1005に収納された検出コイルL1006と、第一コア1005と同一材質且つ同一形状の第二コア1007に収納された参照コイルL1008が、対面状態で収納されている。
図11(a)は、検出コイルL1006と第一コア1005の分解斜視図である。図11(b)は、検出コイルL1006を収納した第一コア1005の断面図である。なお、参照コイルL1008も検出コイルL1006と同一形状及び同一の電気特性である。
検出コイルL1006を、ボビン形状の第一コア1005に形成された開口部1005aに収納する。こうして第一コア1005に収納された検出コイルL1006は、金属物1002が開口部1005aに近づくと当該金属に渦電流が発生し、この渦電流に起因する損失に応じて検出コイルL1006のインダクタンスが低下する。
図12は、近接センサ1001のブロック図である。図12のブロック図の、図3の変位センサ101と同じ箇所には同一の符号を付して説明を省略する。
図12に示す近接センサ1001の、図3の変位センサ101と異なる点は、電圧検出部304の後にコンパレータが二つ存在することである。
第一コンパレータ1201には、電圧検出部304から出力される変位検出信号が反転入力端子に入力されると共に、電源電圧+Vccを抵抗R1202及び抵抗R1203で分圧した参照電圧が非反転入力端子に入力される。
第二コンパレータ1206には、電圧検出部304から出力される変位検出信号が非反転入力端子に入力されると共に、電源電圧+Vccを抵抗R1207及び抵抗R1208で分圧した参照電圧が反転入力端子に入力される。
第一コンパレータ1201は、電流制限抵抗R1204を通じてオープンコレクタのトランジスタスイッチ1205をオン・オフ制御する。
第二コンパレータ1206は、電流制限抵抗R1209を通じてオープンコレクタのトランジスタスイッチ1210をオン・オフ制御する。
これを近接センサ1001に応用すると、例えば、インダクタンスが固定されている参照コイルL1008に対して検出コイルL1006のインダクタンスが減少すると正極の検出信号を出力するように近接センサ1001が構成されている場合、逆に検出コイルL1006のインダクタンスが増加すると負極の検出信号を出力することとなる。
そこで、検出コイルL1006に非磁性体金属が近接して、検出コイルL1006のインダクタンスが減少することを検出する第一コンパレータ1201と、検出コイルL1006に磁性体金属が近接して、検出コイルL1006のインダクタンスが増加することを検出する第二コンパレータ1206とをそれぞれ設けると、一つの近接センサ1001で二つの状態変化を検出することができる。
勿論、一方のコンパレータを省略して、非磁性体金属のみを検出する近接センサとしても、或は磁性体金属のみを検出する近接センサとしても応用することができる。
図12にて説明したように、変位センサ101の出力信号をコンパレータで二値化することで、近接センサ1001が実現できる。
図13は、本発明の第三の実施形態である近接センサ1001の回路図である。
図13に示す近接センサ1001の回路構成のうち、コンパレータ以前の回路構成は、図4にて説明した、第一の実施形態に係る変位センサ101と同一である。勿論、シーケンサ403の動作も同一であるので、図5及び図6に開示した波形図と同じ動作をする。変位センサ101と異なる点は、第一センサコイルL201は検出コイルL1006となり、第二センサコイルL202は参照コイルL1008となったことである。つまり、検出コイルL1006のインダクタンスは変化するが、参照コイルL1008のインダクタンスは変化しないので、厳密には図5(d)の波形の振幅が少し変化する。しかし、相対的なインダクタンスの差が変化することには変わりがないので、電流差を検出した以降の波形は同一になる。
また、コンパレータ以降の回路構成は、図12の回路素子と全く同一である。したがって、検出コイルL1006のインダクタンスの変化に応じて、非磁性体金属及び磁性体をそれぞれのコンパレータで検出することができる。
図14は、本発明の第四の実施形態である近接センサ1401の回路図である。
コンパレータ以前の回路構成は、図8にて説明した、第二の実施形態に係る変位センサ801と同一である。勿論、シーケンサ804の動作も同一であるので、図9に開示した波形図と同じ動作をする。
また、第三の実施形態の近接センサ1001と同様、コンパレータ以降の回路構成は、図12の回路素子と全く同一である。したがって、検出コイルL1006のインダクタンスの変化に応じて、非磁性体金属及び磁性体をそれぞれのコンパレータで検出することができる。
第三の実施形態の近接センサ1001及び第四の実施形態に係る近接センサ1401は、それぞれ第一の実施形態に係る変位センサ101及び第二の実施形態に係る変位センサ801の回路をそのまま応用して、近接センサを実現した。変位センサは、プローブ104に対するスリーブ103の位置をアナログ電圧信号にて出力するため、その回路素子には所定の精度(誤差範囲)を要求する。特に、アナログ電圧信号は正負両極方向に変化するので、所定の位置検出精度を実現するため、計測用途に適したオペアンプを正電源と負電源の二電源で駆動させる必要があった。
翻って、近接センサはデジタル値を出力する。つまり、変位センサに求められていた位置検出精度は不要である。非磁性体金属及び/又は磁性体が近接したか否かを検出できさえすればよい。そこで、回路構成をより簡易にするため、図13に開示した近接センサ1001を片電源で実現する構成に作り変えたものが、図15に開示する近接センサ1501である。
図15に示す近接センサ1501の回路構成のうち、図13に示す近接センサ1001の回路構成との相違点は、第一矩形波電圧源401、第二矩形波電圧源402及びシーケンサ403をマイコン1511で実現している点と、オペアンプ404及びオペアンプ407を片電源で動作させるために、非反転入力端子に抵抗R1504及び抵抗R1505で電源電圧を分圧して、電源電圧の半分の電位を与えている点である。
検出コイルL1006には、マイコン1511から出力される矩形波信号がコンデンサC1509を介して入力される。同様に参照コイルL1008には、マイコン1511から出力される矩形波信号がコンデンサC1510を介して入力される。市場に流通する一般的なマイコン1511は例えば+5Vの片電源仕様であるので、マイコン1511のバスから出力される矩形波信号は、0Vと5Vしか出力しない。そこで、コンデンサC1509及びC1510で直流成分をカットして、検出コイルL1006及び参照コイルL1008に矩形波信号の交流成分のみ供給する。
図15の回路は、仮に変位センサとして用いると変位検出精度の点では劣るものの、金属物或は磁性体を検出する用途であれば十分な性能を発揮する。また、片電源仕様であり、市販のマイコン1511をそのまま用いることができるので、極めて安価に近接センサ1501を実現することができる。
第一乃至第五の実施形態に共通する技術として、二つのコイルに矩形波電圧を印加して、各々のコイルに流れる電流を独立して検出してから差動回路等で差を演算するのではなく、直接電流の差の値を検出することにより、S/N比が良好であり高感度なセンサを実現できる。
また、各々のコイルは同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
なお、プローブ104の外殻104aの材質は、必ずしもステンレスに限られないが、一定の条件が求められる。前述のように、非磁性体金属であることと、抵抗率が高いことである。抵抗率は、スリーブ103の抵抗率より高いことが好ましい。本実施形態の場合はスリーブ103の材質である真鍮(黄銅)が5〜7×10-8 Ωmであるのに対し、ステンレスは7.2×10-7 Ωmなので、この条件を満たす。
Claims (4)
- 第一センサコイルと、
第二センサコイルと、
前記第一センサコイル及び/又は第二センサコイルのインダクタンスを変化させる金属製のスリーブと、
前記第一センサコイル及び前記第二センサコイルに矩形波電圧を供給する矩形波電圧源と、
前記第一センサコイルに流れる第一の電流と、前記第二センサコイルに流れる第二の電流との差を検出して電圧信号を出力する電流差検出部と、
前記電流差検出部から得られる電流差信号の電位を反転する反転増幅回路と、
前記電流差信号と前記反転増幅回路の出力信号を基に前記第一センサコイル及び前記第二センサコイルの相対的インダクタンスの差に応じて変化する信号を出力する電圧検出部と
を具備する変位センサ。 - 更に、
前記第一センサコイル及び前記第二センサコイルが長手方向に巻線される高透磁率のコアと、
前記第一センサコイル及び前記第二センサコイルを収納する金属製の外殻と
を具備し、
前記スリーブは前記金属製の外殻を覆う形状であると共に、前記スリーブの抵抗率は前記外殻の抵抗率より小さい、
請求項1記載の変位センサ。 - 前記電流差検出部はオペアンプであり、
前記第一センサコイルと前記第二センサコイルは前記オペアンプの反転入力端子に接続される、
請求項2記載の変位センサ。 - 前記電流差検出部はトランスとオペアンプであり、
前記第一センサコイルは前記トランスの第一巻線に接続され、
前記第二センサコイルは前記トランスの前記第一巻線と同一巻線数の第二巻線に接続され、
前記オペアンプの反転入力端子及び非反転入力端子はそれぞれ前記トランスの第三巻線に接続される、
請求項2記載の変位センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011048173A JP4852666B1 (ja) | 2011-03-04 | 2011-03-04 | 変位センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011048173A JP4852666B1 (ja) | 2011-03-04 | 2011-03-04 | 変位センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4852666B1 JP4852666B1 (ja) | 2012-01-11 |
| JP2012185032A true JP2012185032A (ja) | 2012-09-27 |
Family
ID=45540510
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011048173A Active JP4852666B1 (ja) | 2011-03-04 | 2011-03-04 | 変位センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4852666B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101751485B1 (ko) * | 2015-03-10 | 2017-06-27 | 주식회사 트루윈 | 진폭 변조를 이용한 인덕턴스 방식의 변위센서 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112284230B (zh) * | 2020-10-09 | 2021-11-16 | 珠海格力电器股份有限公司 | 位移检测装置、位移监控方法及压缩机 |
| CN114440753B (zh) * | 2022-02-24 | 2022-11-22 | 电子科技大学 | 一种基于电涡流原理的非接触式位移测量装置 |
Citations (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5276055A (en) * | 1975-12-22 | 1977-06-25 | Bon Denki Kk | Device for detecting uneveness of surface of banddlike object |
| JPS549652A (en) * | 1977-06-22 | 1979-01-24 | Matsushita Electric Works Ltd | Differential transformer type sensor |
| JPS5544950A (en) * | 1978-09-25 | 1980-03-29 | Shin Meiwa Ind Co Ltd | Electromagnetic sensing method and sensor |
| JPS566488A (en) * | 1979-06-28 | 1981-01-23 | Toshiba Corp | Oxide piezo-electric material |
| JPS57207804A (en) * | 1981-06-17 | 1982-12-20 | Japanese National Railways<Jnr> | Spot detecting device of vehicle |
| JPS58206918A (ja) * | 1982-01-29 | 1983-12-02 | Komatsu Ltd | 差動トランスの信号処理回路 |
| JPS5910814A (ja) * | 1982-07-12 | 1984-01-20 | Hitachi Metals Ltd | トナ−レベルセンサ |
| JPS6018701A (ja) * | 1983-07-13 | 1985-01-30 | Anritsu Corp | 変位測定装置 |
| JPS6049404U (ja) * | 1983-09-12 | 1985-04-06 | 株式会社ミツトヨ | 変位量測定装置 |
| JPS6146463U (ja) * | 1984-08-30 | 1986-03-28 | ティーディーケイ株式会社 | 磁気的検知装置 |
| JPS61284608A (ja) * | 1985-06-11 | 1986-12-15 | Shin Meiwa Ind Co Ltd | 差動トランスの信号処理装置 |
| JPS6222002A (ja) * | 1985-07-22 | 1987-01-30 | Mitsutoyo Mfg Corp | 変位検出ヘツド |
| JPS6253373U (ja) * | 1985-09-25 | 1987-04-02 | ||
| JPS63163114A (ja) * | 1986-12-25 | 1988-07-06 | Sanki Eng Co Ltd | 偏位検出装置 |
| JPS63252258A (ja) * | 1987-04-09 | 1988-10-19 | Diesel Kiki Co Ltd | 振動により生じる加速度の検出装置 |
| JPS63273001A (ja) * | 1987-04-30 | 1988-11-10 | Makome Kenkyusho:Kk | 変位測定装置 |
| JPH0158163U (ja) * | 1987-10-08 | 1989-04-11 | ||
| JPH01202670A (ja) * | 1988-02-09 | 1989-08-15 | Diesel Kiki Co Ltd | 三次元加速度センサ |
| JPH02201114A (ja) * | 1989-01-30 | 1990-08-09 | Makome Kenkyusho:Kk | 変位測定装置 |
| JPH0518406A (ja) * | 1991-07-11 | 1993-01-26 | Yamaha Motor Co Ltd | ストロークセンサー付油圧機器 |
| JPH0577604U (ja) * | 1992-03-23 | 1993-10-22 | 株式会社南武 | ロータリーシリンダのロッド位置検出装置 |
| JPH05280914A (ja) * | 1992-03-31 | 1993-10-29 | Isuzu Motors Ltd | 変位量検出センサ |
| JPH06331303A (ja) * | 1993-05-26 | 1994-12-02 | I T W Ind Kk | コア変位量検出方法 |
| JPH0755499A (ja) * | 1993-08-13 | 1995-03-03 | Sakata Denki Kk | 変位測定装置 |
| JPH07234102A (ja) * | 1994-02-25 | 1995-09-05 | Reideitsuku:Kk | 変位測定装置 |
| JPH07270178A (ja) * | 1994-03-29 | 1995-10-20 | Japan Steel Works Ltd:The | 差動トランスのコアの位置を検出する装置 |
| JPH1038090A (ja) * | 1996-07-22 | 1998-02-13 | Koyo Electron Ind Co Ltd | 金属部材と樹脂との一体成形品における防水構造 |
| JP2001027505A (ja) * | 1999-07-13 | 2001-01-30 | Ribekkusu:Kk | 小型流体圧シリンダにおける位置検出器 |
| JP2001356179A (ja) * | 2000-06-13 | 2001-12-26 | S G:Kk | 導体検出装置 |
| JP2005031245A (ja) * | 2003-07-09 | 2005-02-03 | Kyocera Mita Corp | 画像形成装置 |
| JP2005201790A (ja) * | 2004-01-16 | 2005-07-28 | Keyence Corp | 接触式変位測定器 |
| JP2008170360A (ja) * | 2007-01-15 | 2008-07-24 | Shinko Denki Kk | 変位センサ |
| JP2010216863A (ja) * | 2009-03-13 | 2010-09-30 | Yamatake Corp | 近接センサ |
-
2011
- 2011-03-04 JP JP2011048173A patent/JP4852666B1/ja active Active
Patent Citations (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5276055A (en) * | 1975-12-22 | 1977-06-25 | Bon Denki Kk | Device for detecting uneveness of surface of banddlike object |
| JPS549652A (en) * | 1977-06-22 | 1979-01-24 | Matsushita Electric Works Ltd | Differential transformer type sensor |
| JPS5544950A (en) * | 1978-09-25 | 1980-03-29 | Shin Meiwa Ind Co Ltd | Electromagnetic sensing method and sensor |
| JPS566488A (en) * | 1979-06-28 | 1981-01-23 | Toshiba Corp | Oxide piezo-electric material |
| JPS57207804A (en) * | 1981-06-17 | 1982-12-20 | Japanese National Railways<Jnr> | Spot detecting device of vehicle |
| JPS58206918A (ja) * | 1982-01-29 | 1983-12-02 | Komatsu Ltd | 差動トランスの信号処理回路 |
| JPS5910814A (ja) * | 1982-07-12 | 1984-01-20 | Hitachi Metals Ltd | トナ−レベルセンサ |
| JPS6018701A (ja) * | 1983-07-13 | 1985-01-30 | Anritsu Corp | 変位測定装置 |
| JPS6049404U (ja) * | 1983-09-12 | 1985-04-06 | 株式会社ミツトヨ | 変位量測定装置 |
| JPS6146463U (ja) * | 1984-08-30 | 1986-03-28 | ティーディーケイ株式会社 | 磁気的検知装置 |
| JPS61284608A (ja) * | 1985-06-11 | 1986-12-15 | Shin Meiwa Ind Co Ltd | 差動トランスの信号処理装置 |
| JPS6222002A (ja) * | 1985-07-22 | 1987-01-30 | Mitsutoyo Mfg Corp | 変位検出ヘツド |
| JPS6253373U (ja) * | 1985-09-25 | 1987-04-02 | ||
| JPS63163114A (ja) * | 1986-12-25 | 1988-07-06 | Sanki Eng Co Ltd | 偏位検出装置 |
| JPS63252258A (ja) * | 1987-04-09 | 1988-10-19 | Diesel Kiki Co Ltd | 振動により生じる加速度の検出装置 |
| JPS63273001A (ja) * | 1987-04-30 | 1988-11-10 | Makome Kenkyusho:Kk | 変位測定装置 |
| JPH0158163U (ja) * | 1987-10-08 | 1989-04-11 | ||
| JPH01202670A (ja) * | 1988-02-09 | 1989-08-15 | Diesel Kiki Co Ltd | 三次元加速度センサ |
| JPH02201114A (ja) * | 1989-01-30 | 1990-08-09 | Makome Kenkyusho:Kk | 変位測定装置 |
| JPH0518406A (ja) * | 1991-07-11 | 1993-01-26 | Yamaha Motor Co Ltd | ストロークセンサー付油圧機器 |
| JPH0577604U (ja) * | 1992-03-23 | 1993-10-22 | 株式会社南武 | ロータリーシリンダのロッド位置検出装置 |
| JPH05280914A (ja) * | 1992-03-31 | 1993-10-29 | Isuzu Motors Ltd | 変位量検出センサ |
| JPH06331303A (ja) * | 1993-05-26 | 1994-12-02 | I T W Ind Kk | コア変位量検出方法 |
| JPH0755499A (ja) * | 1993-08-13 | 1995-03-03 | Sakata Denki Kk | 変位測定装置 |
| JPH07234102A (ja) * | 1994-02-25 | 1995-09-05 | Reideitsuku:Kk | 変位測定装置 |
| JPH07270178A (ja) * | 1994-03-29 | 1995-10-20 | Japan Steel Works Ltd:The | 差動トランスのコアの位置を検出する装置 |
| JPH1038090A (ja) * | 1996-07-22 | 1998-02-13 | Koyo Electron Ind Co Ltd | 金属部材と樹脂との一体成形品における防水構造 |
| JP2001027505A (ja) * | 1999-07-13 | 2001-01-30 | Ribekkusu:Kk | 小型流体圧シリンダにおける位置検出器 |
| JP2001356179A (ja) * | 2000-06-13 | 2001-12-26 | S G:Kk | 導体検出装置 |
| JP2005031245A (ja) * | 2003-07-09 | 2005-02-03 | Kyocera Mita Corp | 画像形成装置 |
| JP2005201790A (ja) * | 2004-01-16 | 2005-07-28 | Keyence Corp | 接触式変位測定器 |
| JP2008170360A (ja) * | 2007-01-15 | 2008-07-24 | Shinko Denki Kk | 変位センサ |
| JP2010216863A (ja) * | 2009-03-13 | 2010-09-30 | Yamatake Corp | 近接センサ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101751485B1 (ko) * | 2015-03-10 | 2017-06-27 | 주식회사 트루윈 | 진폭 변조를 이용한 인덕턴스 방식의 변위센서 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4852666B1 (ja) | 2012-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6304647B2 (ja) | 電流検出装置 | |
| US10508932B2 (en) | Measuring the position of an object using eddy-currents | |
| CN106950515A (zh) | 磁传感器及具备其的电流传感器 | |
| JP4852667B1 (ja) | 近接センサ | |
| JP2014117153A (ja) | 電気機械における抵抗の推定 | |
| CN105264389B (zh) | 电流测量装置以及电流计算方法 | |
| CN103575960A (zh) | 巨磁阻效应电流传感器 | |
| JP4852666B1 (ja) | 変位センサ | |
| JP2013120098A (ja) | 電圧検出装置及び電力検出装置 | |
| JP7262885B2 (ja) | 超高感度マイクロ磁気センサ | |
| JP4209114B2 (ja) | 磁界センサ | |
| Wang et al. | Split core closed loop Hall effect current sensors and applications | |
| JP2011112634A (ja) | フラックスゲート漏電センサ用のリングコア、該リングコアを備えるリングコアユニット及びフラックスゲート漏電センサ | |
| JP6106909B2 (ja) | 電流センサ | |
| JP5767673B2 (ja) | 電流波形測定装置 | |
| JP4623289B2 (ja) | 電流センサ | |
| JP4747224B1 (ja) | インダクタンス変化検出回路、変位検出装置及び金属検出装置 | |
| JP4898971B1 (ja) | インダクタンス変化検出回路、変位検出装置及び金属検出装置 | |
| JP4731633B1 (ja) | 磁気センサ | |
| JP4810021B2 (ja) | 位置検出装置 | |
| KR100860527B1 (ko) | 전자식 전류 변성기 | |
| JP4902001B2 (ja) | インダクタンス変化検出回路、変位検出装置及び金属検出装置 | |
| JP5758229B2 (ja) | 磁界検出装置 | |
| JP3583699B2 (ja) | センサ装置 | |
| WO2000063057A1 (en) | Current sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111024 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4852666 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141028 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |