JP2014130077A - パターン形状評価方法、半導体装置の製造方法及びパターン形状評価装置 - Google Patents
パターン形状評価方法、半導体装置の製造方法及びパターン形状評価装置 Download PDFInfo
- Publication number
- JP2014130077A JP2014130077A JP2012287906A JP2012287906A JP2014130077A JP 2014130077 A JP2014130077 A JP 2014130077A JP 2012287906 A JP2012287906 A JP 2012287906A JP 2012287906 A JP2012287906 A JP 2012287906A JP 2014130077 A JP2014130077 A JP 2014130077A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- obtaining
- pattern
- edge
- pattern shape
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/285—Emission microscopes, e.g. field-emission microscopes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/22—Optical, image processing or photographic arrangements associated with the tube
- H01J37/222—Image processing arrangements associated with the tube
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/261—Details
- H01J37/265—Controlling the tube; circuit arrangements adapted to a particular application not otherwise provided, e.g. bright-field-dark-field illumination
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P74/00—Testing or measuring during manufacture or treatment of wafers, substrates or devices
- H10P74/20—Testing or measuring during manufacture or treatment of wafers, substrates or devices characterised by the properties tested or measured, e.g. structural or electrical properties
- H10P74/203—Structural properties, e.g. testing or measuring thicknesses, line widths, warpage, bond strengths or physical defects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B15/00—Measuring arrangements characterised by the use of electromagnetic waves or particle radiation, e.g. by the use of microwaves, X-rays, gamma rays or electrons
- G01B15/04—Measuring arrangements characterised by the use of electromagnetic waves or particle radiation, e.g. by the use of microwaves, X-rays, gamma rays or electrons for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/56—Measuring geometric parameters of semiconductor structures, e.g. profile, critical dimensions or trench depth
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/22—Treatment of data
- H01J2237/221—Image processing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/245—Detection characterised by the variable being measured
- H01J2237/24571—Measurements of non-electric or non-magnetic variables
- H01J2237/24578—Spatial variables, e.g. position, distance
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/245—Detection characterised by the variable being measured
- H01J2237/24592—Inspection and quality control of devices
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Length-Measuring Devices Using Wave Or Particle Radiation (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Abstract
【課題】ウエハの上方から観察した回路パターンの平面像のみから、回路パターンの断面形状又は3次元形状を推定し評価する。
【解決手段】本発明は、立体的な構造体が上面に形成された基板の主面に略垂直な方向から収束エネルギー線を照射するとともに上記基板の上面を走査させ、上記基板及び上記構造体から発生した2次エネルギー線又は上記基板及び上記構造体により反射若しくは散乱されたエネルギー線の強度を検出及び/又は測定し、上記構造体の上面観察像を取得する処理と、上記上面観察像における収束エネルギー線の照射位置と測定された上記強度から上記構造体の表面の凹凸形状による散乱強度の不確かさ情報を求める処理と、求めた上記不確かさ情報に基づいて上記構造体の表面の傾斜角度θを求める処理と、求めた傾斜角度θに基づいて上記構造体の立体形状を推定する処理とを有する。
【選択図】図14
【解決手段】本発明は、立体的な構造体が上面に形成された基板の主面に略垂直な方向から収束エネルギー線を照射するとともに上記基板の上面を走査させ、上記基板及び上記構造体から発生した2次エネルギー線又は上記基板及び上記構造体により反射若しくは散乱されたエネルギー線の強度を検出及び/又は測定し、上記構造体の上面観察像を取得する処理と、上記上面観察像における収束エネルギー線の照射位置と測定された上記強度から上記構造体の表面の凹凸形状による散乱強度の不確かさ情報を求める処理と、求めた上記不確かさ情報に基づいて上記構造体の表面の傾斜角度θを求める処理と、求めた傾斜角度θに基づいて上記構造体の立体形状を推定する処理とを有する。
【選択図】図14
Description
本発明は、例えば走査型顕微鏡を用いた非破壊観測及び画像処理による詳細な形状評価方法、そのための装置、及び、当該技術を採用する半導体装置の製造方法に関する。
半導体集積回路(LSI)は、回路パターンの微細化による高性能化・高集積化が進んでいる。現在、最先端LSIの最小回路パターンの線幅は30nm(ナノメートル)以下であり、LSIの性能を確保するためには、これらの回路寸法を厳密に(例えば寸法のバラツキ変動の許容値が設計値の1割以下となるような精度で)管理する必要がある。上記回路寸法の測定には現在広く走査型電子顕微鏡(SEM)が用いられている。非特許文献1には、ウエハを上面から観察する回路寸法計測専用の電界放出型電子顕微鏡(CD-SEM: Critical Dimension SEM)について記載されている。
上記CD-SEMは、半導体回路の線幅測定の他、様々な特徴量を計測するために用いられている。例えば、上記回路パターンのエッジにはラインエッジラフネス(LER)と呼ばれる凹凸が存在し、回路性能に悪影響を及ぼすことが知られている。CD-SEMは上記LERの計測に広く用いられており、例えば特許文献1にはその測定方法が記載されている。
その一方で、ウエハ上に積層・パターニングにより形成された素子構造の立体的な形状を知りたいという要求がある。特に、LSIの量産工程では、断面観察によらず非破壊でこれを行うことが望ましいが、このための手法として、一般にAFM又は光学的方法(Scatterometry)が用いられている。
AFMは、微細な先端をもつ探針により、探針先端と試料表面の間の原子間力が一定になるように走査することにより、試料表面の凹凸形状を計測する方法である。その詳細は、例えば特許文献2に記載されている。
Scatterometryは、周期的立体構造をもつパターンに光を入射してその反射回折光の波長又は回折角依存性を測定し、これをあらかじめ様々な断面形状に対して計算により求めた回折角依存性と比較することにより立体構造の断面形状を推定する。Scatterometryについては、例えば非特許文献2に記載されている。
Scatterometryと類似の手法であって、SEMを用いて断面形状を推定する方法に、MBL(model-based library)法がある。MBL法は、試料に収束電子ビームを走査して得られる2次電子検出信号強度分布と、予め様々な断面形状に対して計算により求めた2次電子信号強度分布との比較により、立体構造の断面形状を推定する。MBLについては、例えば特許文献3又は非特許文献3に記載されている。
また、SEMを用いて立体構造を測定する方法として、tilt-SEMがある。この方法はウエハに対して異なる角度から電子線を入射して得られた複数の像からステレオ画像の原理により3次元形状を推測する。tilt-SEMについては、例えば特許文献4に記載されている。
Hitachi Review vol.60 (2011), No.5 pp.203-209
Solid State Technology, Vol.54, Issue 8, (2011)
Proceedings of SPIE Vol. 5375 (SPIE, Bellingham, WA, 2004) Dimensional Metrology of Resist Lines using a SEM Model-Based Library Approach
半導体集積回路(LSI)の製造工程では、回路パターン又はこれを形成するためのレジストパターン等の断面形状、もしくは3次元形状を所定の設計範囲内に管理することが重要である。これらの形状が設計値通りとなるように製造条件を設定したり、形状が劣化した場合には、いち早くこれを検知し、製造プロセスへフィードバックすることで品質劣化を抑制する必要がある。
しかし、現在まで、任意形状の微細な回路パターンの断面形状又は3次元形状を、非破壊、高精度かつ簡便に計測できる手法が存在しないという技術課題があった。例えばCD-SEMは、任意形状の微細な回路パターンの寸法を非破壊、高精度かつ簡便に計測できるが、ウエハの上方から回路の平面形状を観察するために、断面形状の推定が困難であるという技術課題を有している。
そこで一般には、ウエハを破壊して回路パターンの断面を露出し、その断面形状を電子顕微鏡で観察する手法が用いられる。ところが、製品ウエハに対し、この手法を適用することは難しい。このように、従来、CD-SEMを用いた断面形状の推定は困難であると考えられており、前述したような各種の方法が試みられてきた。
しかし、そのいずれの方法においても、以下のような技術上の課題がある。
例えばAFMによる方法では、回路パターンの寸法が縮小するのに伴い、探針がパターン間に入り込むことができず、形状測定が困難になるという課題がある。
例えばAFMによる方法では、回路パターンの寸法が縮小するのに伴い、探針がパターン間に入り込むことができず、形状測定が困難になるという課題がある。
また、scatterometry又はMBLによる方法では、様々な断面形状に対して予想される測定結果を予め計算により求めてライブラリとして用意する必要がある。しかし、これには膨大な計算を要し、適用可能な形状が台形等の比較的単純形状に限定されるという課題がある。特に、scatterometryによる方法では、被計測パターンが、数十ミクロン角の広い領域内に一様に存在する周期パターンに限定されるため、論理LSIの回路のような不規則的なパターンの断面形状を推定することが困難である。また、同方法は、計測パターンのために専用の広い領域を確保する必要があるという課題がある。
また、tilt-SEMを用いる方法では、収束電子線の入射角を変化させるための特殊な電子光学系が必要とされ、一般に、分解能等の性能が劣化する等の課題がある。また、ステージを傾けるために装置が大型化するという課題、計測に時間を要するという課題等も存在する。
そこで、本発明は、荷電粒子線装置を用いて取得した基板の上面からの観察像だけを用いつつ、基板の上面に形成された任意の構造体の断面形状を非破壊かつ高精度で推定できる技術を提供する。
上記課題を解決するために、例えば特許請求の範囲に記載の構成を採用する。一例としての発明は、(a) 立体的な構造体が上面に形成された基板の主面に略垂直な方向から収束エネルギー線を照射するとともに上記基板の上面を走査させ、上記基板及び上記構造体から発生した2次エネルギー線又は上記基板及び上記構造体により反射若しくは散乱されたエネルギー線の強度を検出及び/又は測定し、上記構造体の上面観察像を取得する処理と、(b) 上記上面観察像における収束エネルギー線照射位置と測定された上記強度から上記構造体の表面の凹凸形状による散乱強度の不確かさ情報を求める処理と、(c) 求めた上記不確かさ情報に基づいて上記構造体の表面の傾斜角度θを求める処理と、(d) 求めた傾斜角度θに基づいて上記構造体の立体形状を推定する処理とを有する。
本発明によれば、基板の上面観察像のみから、基板の上面に形成された構造体の断面形状又は3次元形状を推定し評価することができる。前述した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
以下、図面に基づいて、本発明の実施の形態を説明する。なお、本発明の実施態様は、後述する形態例に限定されるものではなく、その技術思想の範囲において、種々の変形が可能である。例えば以下の説明では電子顕微鏡を用いて試料を観察する場合について説明するが、集束イオンビーム装置その他の荷電粒子線装置を用いて試料を観察する場合や加工する場合についても同様に適用することができる。
(3次元形状観察像におけるエッジ変動要因とその成分分解)
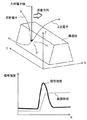
まず、本発明で用いる電子顕微鏡による観察像の形成過程を、図1を用いて説明する。単純化のため、基板面上に形成された略立方体状の構造体(例えば半導体やレジストパターン等)を考える。基板面をx−y平面、構造体のエッジの延びる方向(エッジ方向)をy方向とする。上記構造体の特徴寸法より十分に細く収束された電子線を、上記基板面と略垂直な方向(z方向)から基板上に照射すると共に、基板上を上記エッジ方向と略垂直な方向(x方向)に走査する。上記基板又は構造体に入射した電子は、基板又は構造体内部で散乱を受けて2次電子を放出し、又は直接反射(又は後方散乱)され、その一部を基板又は構造体の外部へ放出する。上記2次電子又は反射電子(以下、「2次電子等」という)の放出量は、電子線が凸形状の凸部(又は角の上部)に入射した場合に増大する。
まず、本発明で用いる電子顕微鏡による観察像の形成過程を、図1を用いて説明する。単純化のため、基板面上に形成された略立方体状の構造体(例えば半導体やレジストパターン等)を考える。基板面をx−y平面、構造体のエッジの延びる方向(エッジ方向)をy方向とする。上記構造体の特徴寸法より十分に細く収束された電子線を、上記基板面と略垂直な方向(z方向)から基板上に照射すると共に、基板上を上記エッジ方向と略垂直な方向(x方向)に走査する。上記基板又は構造体に入射した電子は、基板又は構造体内部で散乱を受けて2次電子を放出し、又は直接反射(又は後方散乱)され、その一部を基板又は構造体の外部へ放出する。上記2次電子又は反射電子(以下、「2次電子等」という)の放出量は、電子線が凸形状の凸部(又は角の上部)に入射した場合に増大する。
そこで、電子線の走査中に放出された上記2次電子等を検出器で検出し、その検出強度を走査方向における電子線の照射位置xに対してプロットすると、図1の下段に示すような2次電子等の検出信号強度分布が得られる。一般に、検出信号強度分布を検出信号の最大値で規格化したときの所定のしきい値レベルで切った時の位置、又は、検出信号強度分布の傾斜が最大となる位置等に基づいてパターン及び非パターンの境界を決定する。2つのパターン境界位置間の距離からパターン寸法が計測される。また、走査をエッジ方向(y方向)の異なる位置で行い、求めたパターン/非パターン境界を結ぶことによりパターンのエッジ形状が得られる。通常、このようにして得られたエッジ形状は、エッジ方向に沿って凹凸状を呈する。この凹凸の大きさをラインエッジラフネスと呼ぶ。本発明者は、上記ラフネスの原因を考察することにより、パターンエッジに平行な方向及び垂直な方向を含む平面(以下、「基板面」という)内の検出信号強度分布から、上記基板面に垂直な方向のパターンの立体形状を推定する方法を考案した。
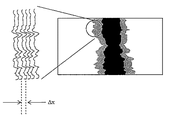
上述したラインエッジラフネスは、一般的に、図2の上段図(a)に示すような構造体のエッジ位置のばらつきに起因するものと考えられている。実際の構造体は立方体ではなく、その側壁は図2の上段図(a)に示すように傾斜しており、又は、図2の中段図(b)に示すように表面に凹凸(表面ラフネス)を有する。検出信号強度分布は、傾斜角の変化や表面の凹凸の影響を受けると考えられる。
y方向について一定のサンプリング間隔で規定された開始点からx方向に電子線を走査して2次電子検出信号強度を計測すると、図2の下段図(c)に示すような2次電子検出信号強度の2次元分布が得られる。ここで、2次電子検出信号強度の2次元分布は、(1)構造体の立体形状及び材料特性に起因する強度変化、(2)エッジ方向に沿った構造体のx方向位置変動による強度分布の変動、(3)構造体表面の凹凸に起因する強度分布の変動の3つの要因の影響を受けると考えられる。
そこで、これらの3つの要因を分解して考える。まず、y座標を固定して、xz平面でパターンを切断した時の断面形状と、当該形状に対応する1次元信号強度分布について考える。この場合、図2の中段図(b)の構造体は、図3の上段図(a)の左側に模式的に示すようなマクロなパターン構造の表面に、図3の中断図(b)の左側に模式的に示すようなミクロな表面の凹凸構造が重なった形状を有するものと考えられる。図3の下段図(c)の左側にマクロパターンとミクロパターンが重畳したイメージを示す。
前述したように、2次電子放出量は、電子線が凸部に入射すると増大し、逆に電子線が凹部に入射すると減少する。従って、パターン全体のマクロな構造を見ると、パターンの上面角部は凸形状なので、上面角部へ向かって信号強度が増大する(図3の上段図(a)の右側)。一方、ミクロな構造を見ると、パターン表面に存在する凹凸の凸部に入射したとき、信号強度は増大する(図3の中段図(b)の右側)。従って、これに対応して2次電子信号強度分布は、マクロなパターン構造に対応した大きなピーク状分布(図3の上段図(a)の右側)に、表面凹凸構造に対応した細かい信号変動(図3の中段図(b)の右側)が重畳した分布(図3の下段図(c)の右側)となる。但し、構造体の側面では凹凸に対する電子線の入射角度が変化するため、凹凸による信号変動も変化することに留意する。
ここで、y方向のある位置からx方向についての2次電子信号強度の分布を考える。上記表面凹凸はランダムに生じると考えられるので、対応する信号強度分布も図3の下段図(c)の右側における実線から一点鎖線のように不確実性をもってばらつく。測長SEMでは、通常、得られた2次電子信号強度分布をあるしきい値で切ったときのx座標をエッジ座標として検出する。
ところで、しきい値を変えると、構造体の異なる高さ位置zに対応する複数のエッジが検出される。上記エッジ座標は不確実性をもって変動し、その変動量σの特徴はしきい値の関数となる。すなわち、構造体の異なる高さ位置z(又はエッジと垂直方向の位置x)の関数となる。
後述する第1の実施形態では、上記関数の特徴から構造体の立体(断面)形状z(x)を推定する手法について説明する。また、第2の実施形態では、2次元信号強度分布を用い、2次元立体形状を推定する手法について説明する。なお、第2の実施形態の詳細は、後述する実施例4で説明する。
(第1の実施形態)
以下、本発明の第1の実施形態による構造体の立体(断面)形状推定方法の詳細について説明する。以下では、図4の上段図(a)、中段図(b)及び下段図(c)に示す断面プロファイルを有する3種類の試料A、B及びCを解析対象とする。
以下、本発明の第1の実施形態による構造体の立体(断面)形状推定方法の詳細について説明する。以下では、図4の上段図(a)、中段図(b)及び下段図(c)に示す断面プロファイルを有する3種類の試料A、B及びCを解析対象とする。
まず、CD-SEMにより、前記3種類の断面プロファイルを有する構造体の上面観察画像を取得し、上記構造体のエッジ部を解析領域に指定する。対象エッジには、設計上の直線部分を選択し、上記直線に沿った方向をy方向とする。
次に、エッジ検出時のしきい値Tを様々に変えてエッジを検出し、Tの関数としてエッジ点列 {xi(T)} (ただし、i=1,2, ,n)を求め、上記点列の平均エッジ位置<x(T)>からの偏差σ2 (T) = Σ[xi(T)-<x(T)>]2 を計算した。次に、σ(T)をしきい値Tに対してプロットすると、図5の上段図(a)、中段図(b)及び下段図(c)が得られる。前述したように、各段に示す点列は、図4の同じ段の断面プロファイルを有する構造体に対応する。
一般に、検出信号強度のx方向分布I(x)は、構造体のエッジ近傍にピークをもつ。例えばレジストラインパターン等、ある幅Wで凸構造をもついわゆるラインパターンを観察すると、図4に示す各パターンの左右エッジの各々に対応して2つの強度ピークが現れる。つまり、片方のエッジを観察すると、同じしきい値Tに対して検出信号強度の分布ピークの両側に2つのエッジ検出点が得られる。よって、σ(T)は、上記ピークの構造体の内側と外側の各々に対して別々に求める。
一般に、構造体の外側(スペース側)では、外側から強度が徐々に増大して所定のしきい値に達した点のx座標をエッジ位置とする。一方、構造体の内側(ライン側)では、内側から強度が徐々に増大して所定のしきい値に達した点のx座標をエッジ位置とし、これらの値からσ(T)を求める。なお、パターン幅Wが極端に小さくなると、左右のエッジに対する上記ピークが重なり、1本のラインパターンに対して1個のピークが観察されるようになる。この場合、しきい値とx座標は1対1に対応する。
次に、解析領域内で、検出信号強度の分布I(x)のy方向の平均分布<I>(x)を求め、各しきい値Tを、検出信号強度が<I>(x)=Tとなる特定のx座標に対応させる。これにより、しきい値Tの関数としての偏差σ(T)を、xの関数としての偏差σ(x)に変換する。このとき、上記ピークの構造体の外側/内側のxに対する偏差σ(T)は、各々の構造体の外側/内側のxに対応させる。偏差σ(x)を検出信号強度分布<I>(x)とともにプロットすると、図6に示す特性図となる。図6の上段図(a)、中段図(b)及び下段図(c)に示す特性図は、いずれも図4の同じ段の断面プロファイルを有する構造体に対応する。図6の各図は、位置xに入射した電子線に対して得られる平均的なエッジ位置における検出エッジ変動を表わす。
膜減りが大きく、かつ、順テーパ形状を有する試料Aの場合(図4の上段図(a))、偏差σ(x)は構造体の外側下部の平坦面で大きく、入射電子線がエッジに近づくと急激に減少して最小値となり、その後、構造体の中心に向けて徐々に増大し、構造体の上部の平坦面近傍で極大をとる。
一方、ほぼ垂直又はやや逆テーパ形状の側壁を有し、かつ、膜減りが少ない試料B(図4の中段図(b))、試料C(図4の下段図(c))では、偏差σ(x)は、最小値を取った後、急激に増大して台地状のピークを取り、いったん減少した後、構造体の中心に向けて徐々に増大し、構造体の上部の平坦面近傍で極大となる。上記ピークの高さは、逆テーパ状側壁をもつ試料Cの方がやや大きい。
このような分布形状の差異は、断面プロファイルの違いを反映したものと考えられる。
このような分布形状の差異は、断面プロファイルの違いを反映したものと考えられる。
次に、偏差σ(x)の形状のもつ意味について説明する。
まず、解析領域内部において、平均検出信号強度分布<I>(x)に対応して、便宜的に平均断面プロファイル<Z>(x)を考え、実際の構造体の3次元形状Z(x,y)を次式で表わす。
まず、解析領域内部において、平均検出信号強度分布<I>(x)に対応して、便宜的に平均断面プロファイル<Z>(x)を考え、実際の構造体の3次元形状Z(x,y)を次式で表わす。
すなわち、実際の3次元形状Z(x,y)は、平均断面プロファイル<Z>(x)をエッジ点位置yに応じてx方向にΔx(y)シフトし、さらに断面プロファイルに変動ΔZ(x,y)を与えたものと考える。ここで、Δx(y)は、各y毎に、例えば|ΔZ(x,y)|のx方向積分値が最小になるように決める。
次に、上記表現に対応して、実際に観察される検出信号強度の3次元分布も、次のように表わすことができる。

ここで、ΔI(x, y)は、ΔZ(x,y)に対応して断面プロファイルの平均からのずれによって生じる項である。Δnoise(x,y)は、実際の検出画像に重畳するランダムな検出ノイズであり、その振幅は位置・画像に依らない。Δx(y)は、各y毎に、例えば|ΔI(x,y)|2のx方向のエッジ近傍における積分値が最小になるように決める。
さらに、上記表現に対応して、検出されるエッジ点列の平均からの偏差σ(x)も、上記各項に起因する成分に分割することができる。
ここで、σ_measuredは計測結果である。σ_yは、各y毎に、その断面を平均断面プロファイルで最適フィットしたときの構造体のエッジ位置のバラツキに起因する成分である。σ_xzは、構造体の断面形状の変化に起因する成分である。σ_noiseは、検出(画像)ノイズに起因するエッジ検出誤差に起因する成分である。
(エッジ変動成分の分解方法の詳細)
次に、計測されたエッジ変動値σ_measuredを、上述した4つの成分に分解する方法について説明する。以下、各成分について説明する。
次に、計測されたエッジ変動値σ_measuredを、上述した4つの成分に分解する方法について説明する。以下、各成分について説明する。
構造体のエッジ位置のy方向の変動は、一般に、その空間周波数特性が1/f特性に従うのに対し、表面凹凸に起因する計測ばらつき及び検出ノイズは、その空間周波数特性がランダムであると考えられる。そこで、σ_yは、y方向の空間周波数fに対して1/f特性を有する成分(便宜上「真のLER」と呼ぶ)と考える。
なお、エッジに沿って測定されたx方向のエッジ点検出位置のばらつきを、1/f特性を有する成分と、それ以外の成分に分解する方法については、特許文献1に説明されている。ここで、LER成分の分解は、各しきい値毎に行ってもよいし、又は、ある代表的なしきい値Tに対して行ってもよい。
真のLERは、構造体のエッジ位置自体のy方向の変動である。よって、しきい値Tを変えて求めた計測結果に対してはほぼ共通と考えることができる。このため、後者の考えも合理的である。
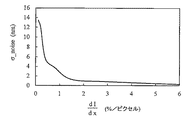
σ_noiseは、信号強度分布の傾斜に依存する。平滑平坦面に対して得られた画像に、1次元(x)方向に強度勾配を加え、平均レベルのしきい値に対して得られたエッジ点の変動を求めた結果を図7に示す。図7に示すように、検出信号の強度勾配が増えると、σ_noiseは小さくなる。σ_noise(x)は、平均検出強度分布の位置xにおける勾配に対するσ_noiseを図7から求めることにより計算することができる。
計測結果σ_measuredから、σ_y及びσ_noiseの寄与を除くと、σ_xzを求めることができる。
ここで、図4の上段図(a)、中段図(b)及び下段図(c)に示すような断面プロファイルを有する試料A、B及びCに対してσ_y及びσ_noiseを計算し、想定結果σ_measuredを、σ_y、σ_noise、σ_xzに分解した結果を図8の上段図(a)、中段図(b)及び下段図(c)に示す。図8から分かるように、断面プロファイルが逆テーパ形状である場合、σ_xzに顕著なピークが現れる。
ここで、図4の上段図(a)、中段図(b)及び下段図(c)に示すような断面プロファイルを有する試料A、B及びCに対してσ_y及びσ_noiseを計算し、想定結果σ_measuredを、σ_y、σ_noise、σ_xzに分解した結果を図8の上段図(a)、中段図(b)及び下段図(c)に示す。図8から分かるように、断面プロファイルが逆テーパ形状である場合、σ_xzに顕著なピークが現れる。
以下では、顕著なピークが発生する原因を考察するために、表面の凹凸が検出信号強度分布に及ぼす影響を次の2つに分類する。
[分類1]
この分類では、電子線は、最初に順テーパ面に入射すると考える。このとき、構造体内部で散乱された後、再び構造体外に出て検出される電子の数は、順テーパ面上の入射位置のごく近傍の凹凸パターンの影響を受けると考えられる。
この分類では、電子線は、最初に順テーパ面に入射すると考える。このとき、構造体内部で散乱された後、再び構造体外に出て検出される電子の数は、順テーパ面上の入射位置のごく近傍の凹凸パターンの影響を受けると考えられる。
[分類2]
この分類では、電子線は、エッジ点から離れた構造体上部における比較的平坦な面に入射すると考える。このとき、構造体内部で散乱された電子の一部が構造体の側面又は逆テーパ面から構造体の外部へ抜け出し、検出される。このとき、外部に抜け出す電子は、側面の凹凸パターンの影響を受ける。このように入射面とは異なる面から外部に抜け出す電子は、その絶対数が少ない。しかし、表面散乱により検出される電子数も比較的少ないので、側面の凹凸パターンの影響を受けた電子が順テーパ面に対する検出結果に及ぼす影響は無視できないと考えられる。
この分類では、電子線は、エッジ点から離れた構造体上部における比較的平坦な面に入射すると考える。このとき、構造体内部で散乱された電子の一部が構造体の側面又は逆テーパ面から構造体の外部へ抜け出し、検出される。このとき、外部に抜け出す電子は、側面の凹凸パターンの影響を受ける。このように入射面とは異なる面から外部に抜け出す電子は、その絶対数が少ない。しかし、表面散乱により検出される電子数も比較的少ないので、側面の凹凸パターンの影響を受けた電子が順テーパ面に対する検出結果に及ぼす影響は無視できないと考えられる。
この影響は、構造体内部の電子線進入長の範囲で、垂直又は逆テーパ面の面積に依存し、垂直又は逆テーパ面高さが大きいほど大きい。また、その影響は、構造体のエッジから内部寄りの比較的広い領域に入射した電子線に及ぶ。
図8の上段図(a)、中段図(b)及び下段図(c)に見られるσ_xzのピークは、垂直又は逆テーパの側面を有する構造体において、電子線が構造体の上部平坦面に入射した場合に見られる。このことから、構造体の上部平坦面に出現するσ_xzのピークは、分類2に起因すると考えられる。
そこで、σ_xzを、以下の2つの成分に分解した(式4)で表す
(1)電子線入射点近傍の順テーパ面上の凹凸パターンの影響
:σ_xz_near
(2)電子線入射点から比較的離れた略垂直又は逆テーパ面上の凹凸パターンの影響
:σ_xz_far
(1)電子線入射点近傍の順テーパ面上の凹凸パターンの影響
:σ_xz_near
(2)電子線入射点から比較的離れた略垂直又は逆テーパ面上の凹凸パターンの影響
:σ_xz_far
以下、上記(1)及び(2)の成分の詳細についてさらに説明する。
まず、凹凸パターンを有する順テーパ面に入射した電子線の散乱に及ぼす凹凸の影響(上記(1)の成分)について考える。ある一定角度の傾斜面に正弦波状の凹凸が存在し、凹部又は凸部の中心(図9の上段図(a)の点P)にビームが入射したとする。ビームの入射位置に対して凹凸の位相を180度変化させると、検出位置が、位相の±方向に1周期分変動する。例えば、ビームが凹部の中心に入射した場合、検出位置は位相の+方向に最大のずれが生じ、ビームが凸部の中心に入射した場合、検出位置は位相の−方向に最大のずれが生じる。
まず、凹凸パターンを有する順テーパ面に入射した電子線の散乱に及ぼす凹凸の影響(上記(1)の成分)について考える。ある一定角度の傾斜面に正弦波状の凹凸が存在し、凹部又は凸部の中心(図9の上段図(a)の点P)にビームが入射したとする。ビームの入射位置に対して凹凸の位相を180度変化させると、検出位置が、位相の±方向に1周期分変動する。例えば、ビームが凹部の中心に入射した場合、検出位置は位相の+方向に最大のずれが生じ、ビームが凸部の中心に入射した場合、検出位置は位相の−方向に最大のずれが生じる。
以下では、説明を簡単にするため、図9の上段図(a)に示すように、平均的な傾斜角θが一定であり、かつ、その表面に沿って凹凸パターンをもつ側壁形状を有する構造体の平均側壁面上の点Pを考える。点P上に代表周期Lの表面凹凸の凸部中心が存在する場合、電子が点Pに向かって入射したとき、検出される信号強度の増加分が最大となり、エッジ検出位置のシフト量が−方向に最大となるとする。逆に、点P上に表面凹凸の凹部中心が存在する場合、検出される信号強度の減少分が最大となり、エッジ検出位置のシフト量が+方向に最大となるとする。
このとき、凹凸によるエッジの検出位置のシフト量は、凸部中心のx座標位置により決まり、その変動振幅Δxは、上記2つのケースにおける凸部中心間のx方向距離となる。従って、側壁面上の凹凸周期をLとし(すなわち、上記x方向の距離はL/2であり)、検出位置が図9の中段図(b)で決まるとすると、エッジの検出位置の変動幅ΔXは、凹凸周期L、側壁傾斜面の角度(傾斜角)θにより、次式のように推定することができる。
これに対し、検出位置が図9の下段図(c)で決まるとすると、エッジの検出位置の変動幅ΔXは、高さH、側壁傾斜面の角度(傾斜角)θにより、次式のように推定することができる。
一般に、傾斜角θが比較的小さい領域では式5が支配的となり、傾斜角θが比較的大きい領域では式6が支配的となる。実際には、傾斜角θは、側面の凹凸周期と高さの両方に依存すると考えられる。従って、両式を加算した次式により、エッジ検出位置の変動幅ΔXを推定することも可能である。
さらに、エッジ検出位置の変動幅ΔXと傾斜面の傾斜角θとの関係は、表面凹凸による電子線信号の強度変動量が表面に対する電子線の入射角に依存するという特性を用いて求めることもできる。
例えば表面に適当な周期L又は高さHの凹凸を有する平面(図10の上段図(a1))に、様々な入射角度の電子線を照射・走査したときの検出信号強度分布をシミュレーションにより計算する(図10の上段図(a2))。このとき、検出強度の変動幅ΔIは、入射角θの関数となる(図10の中段図(b))。
一方、強度変動幅ΔI(θ)と、エッジ検出位置の変動幅ΔXと、平均信号強度分布I(x)の関係は、図10の下段図(c)に示すように、次式で表すことができる。
ただし、式8は、検出信号の強度分布のピークにおいて勾配が0(zero)になると、値が発散する。このため、式8は、検出信号の強度分布のピークにおいて勾配が0(zero)の場合には用いることが出来ないことに注意が必要である。実際には、エッジシフト量の振幅ΔXは、側壁表面凹凸によるエッジ検出位置の計測ばらつきから推定される統計量であり、σ_xz_nearがこれに相当する。また、側壁表面の凹凸パターンはランダム量であるので、その周期L及び高さHに関しても統計的な代表値を用いる。例えば便宜上、平坦面の傾斜角θが0(zero)となるように選んでもよい。
次に、上記(2)の成分(ビームの入射位置から離れた表面位置の凹凸パターンの影響)について説明する。
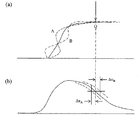
平均的な側壁面に対し、図11の上段図(a)のQ点に電子線が入射したときの検出強度をIQとする場合に、同図内の曲線A及びBに示すように側壁面のパターンが変動した場合を考える。このとき、図11の下段図(b)に示すように、検出強度は検出強度IQに対してΔIA及びΔIBだけ変化し、検出エッジはそれぞれΔxA、ΔxBだけずれる。
平均的な側壁面に対し、図11の上段図(a)のQ点に電子線が入射したときの検出強度をIQとする場合に、同図内の曲線A及びBに示すように側壁面のパターンが変動した場合を考える。このとき、図11の下段図(b)に示すように、検出強度は検出強度IQに対してΔIA及びΔIBだけ変化し、検出エッジはそれぞれΔxA、ΔxBだけずれる。
このとき、側壁面の大きさに対して電子線の広がりが同程度であるとすると、検出エッジに出現するずれ量ΔxA及びΔxBは、入射位置(Q点)に依らず、ほぼ一定と考えることができる。
そこで、電子線の入射位置が、構造体のエッジ位置から構造体中の散乱電子が側壁に及ぶ範囲の間では、前述した(2)の影響がほぼ一定であると仮定し、σ_xz_far に対して台形状の分布形状として近似する。
台形の高さは、側壁の高さと角度に依存するが、例えば式4に従って、σ_xzの最小値から構造体側において、σ_xzからσ_xz_farを引いた後のσ_xz_nearの分布が、0(zero)からほぼ線形に増大するような高さに設定することが考えられる。図4の上段図(a)、中段図(b)及び下段図(c)に対応する各試料について、σ_xzを上記2つの成分に分解した結果を図12の上段図(a)、中段図(b)及び下段図(c)に示す。
(断面形状の推定方法)
次に、不確かさを表す偏差σを分解した結果から、構造体の断面形状を推定する方法について説明する。
次に、不確かさを表す偏差σを分解した結果から、構造体の断面形状を推定する方法について説明する。
実際の構造体の断面形状は、丸みを帯びていたり、裾を引いていたり、様々な形状を有するものと考えられる。つまり、一般的に、側壁角θは、構造体の高さ方向又はx方向の位置に対して一定ではない。本実施形態に係る手法を用いれば、このような構造体であっても、その断面形状を適切に推定することができる。
以下、解析的形状推定法とモデルベースによる形状推定法の2つのアプローチによる断面推定法について説明する。
(解析的推定法)
解析的推定法では、しきい値又はx方向の位置に対し、式5、式6、式7、式8等を用いて、構造体の対応する高さにおける構造体表面の局所的な角度を求め、これをx方向に積分することにより構造体の断面形状を求める。すなわち、次式により、断面形状を求める。ただし、次式において積分範囲は0(zero)からxまでである。
(解析的推定法)
解析的推定法では、しきい値又はx方向の位置に対し、式5、式6、式7、式8等を用いて、構造体の対応する高さにおける構造体表面の局所的な角度を求め、これをx方向に積分することにより構造体の断面形状を求める。すなわち、次式により、断面形状を求める。ただし、次式において積分範囲は0(zero)からxまでである。
ここでは、式5と式8を用い、図12のσ_xz_nearより推定したθ(x)の分布と、推定される断面形状Z(x)を図13の上段図(a)、中段図(b)及び下段図(c)にそれぞれ示す。推定された断面形状(実線で示す形状)は、別途、断面観察より得られた形状(図4の上段図(a)、中段図(b)、下段図(c)の形状)とよく一致していることが分かる。
一方、モデルベースによる形状推定法では、様々な断面形状に対して、その表面の凹凸(例えばその位相)を変化させたときの検出信号強度の分布を求め、各々に対して検出されるエッジ位置間のバラツキ(不確かさ)を、しきい値又はx方向の位置の関数として予め求めておく。次に、このバラツキ(不確かさ)と実際の測定結果とをマッチングさせ、最も近い断面形状を求める又は内挿・外挿により断面形状を推定する。
検出信号の強度分布自体の計算結果ライブラリと計測結果とのマッチングを求めることにより断面形状を推定する従来のMBL法は、測定結果が検出系や検出強度変動に影響を受けるという課題があるのに対し、本方法は、これらの影響を受け難い。もっとも、本方法と従来のMBL法とを併用することもできる。また、マッチングには最尤法等を用いてもよい。
(構造体立体形状推定処理手順)
図14に、第1の実施形態に対応する、構造体の立体形状を推定するための方法のフローチャートを示す。なお、後述する一連の処理は、計算機で実行されるプログラムに基づいて実現される。
図14に、第1の実施形態に対応する、構造体の立体形状を推定するための方法のフローチャートを示す。なお、後述する一連の処理は、計算機で実行されるプログラムに基づいて実現される。
まず、電子顕微鏡により2次元画像を取得し、解析領域を指定する(ステップ1401)。この後、指定された解析領域における平均的な信号強度分布I(x)を算出する(ステップ1402)。信号強度は、指定範囲における最大強度で規格化する。この際、上記範囲における平均的なエッジ方向がy方向となるように画像を調整することが望ましい。
次に、しきい値を指定の最小値から最大値まで所定の間隔毎(例えば5%から100%まで5%毎)に設定し、各しきい値毎にパターンエッジを検出し、しきい値Tの関数としてLERを求める(ステップS1403〜1408)。ここでは、T=I(x)の関係を用いてLERをxの関数に変換した後、これを各成分に分解する。さらに、式5、式6、式7、式8等に従って側壁角度θを求め(ステップS1409、1410)、側壁角度θをx方向に積分して断面形状を得る(ステップS1411)。ここまでの説明では、構造体の表面の凹凸パターンは、表面において等方的であると仮定した。局所的なレジストの溶解性ばらつき等に由来する凹凸に関しては、上記の仮定は、ほぼ正しい。一方、この仮定が成り立たないケースについては、後述する実施例5に述べる。
[実施例1]
本実施例では、前述した推定手法をCD-SEMに適用した実施例について説明する。
(装置構成)
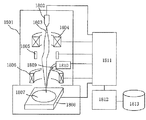
図15に、本実施例で用いたCD-SEMのハードウェア構成の模式図を示す。本実施例のCD-SEMは、主として電子光学カラム(SEMカラム)と試料室からなる走査型電子線顕微鏡の筐体1801と、走査型電子線顕微鏡の制御系1811と、情報処理装置1812により構成される。
本実施例では、前述した推定手法をCD-SEMに適用した実施例について説明する。
(装置構成)
図15に、本実施例で用いたCD-SEMのハードウェア構成の模式図を示す。本実施例のCD-SEMは、主として電子光学カラム(SEMカラム)と試料室からなる走査型電子線顕微鏡の筐体1801と、走査型電子線顕微鏡の制御系1811と、情報処理装置1812により構成される。
情報処理装置1812には、得られた走査電子画像や解析に必要なCADデータなどを格納するデータ記憶装置1813が接続されている。もっとも、データ記憶装置1813は、情報処理装置1812内に格納されていても良い。図示されてはいないが、情報処理装置1812は、CD-SEMの操作者がデータ処理のために必要な情報を装置に対して入力するための情報入力端末及び取得される走査電子画像を表示するための画像表示手段を備えている。情報入力端末の具体例には、キーボード、マウス、画像表示手段上に表示されるGUI画面等がある。
電子光学カラムは、電子銃1802、収束レンズ1804、偏向器1805、対物レンズ1806、検出器1810などにより構成される。試料室は、被検査対象である観察ウエハ1807を載置するステージ1808を備える。電子銃1802から観察ウエハ1807に対して照射される電子線1803により発生した二次電子1809は検出器1810によって検出され、制御系1811によってデジタルデータに変換された後、情報処理装置1812に転送され、解析に使用する画像データが生成される。
本実施例では、CD-SEMに備えられた走査電子顕微鏡を用いてパターン観察を行なって被検査対象の画像データを取得した。得られた画像データをデータ記憶装置1813に保存し、観察終了後、情報入力端末を操作して画像データ解析を実行し、ラフネス指標及び断面構造推定の解析を行った。解析処理は、情報処理装置1812が実行する。
(画像取得工程)
まず、制御系1811(情報処理装置1812)は、ArFレジストのラインパターンに対し、視野の左上から右下までの走査を32回行って得られた二次電子信号強度を平均化し、2次電子信号強度の2次元分布画像を取得する。必要に応じ、情報処理装置1812は、取得した画像をCD-SEMのモニタ画面上に表示する。ここで、観察画像の画素数は、縦・横方向に1500画素、1画素の1辺を1nm(ナノメートル)、視野内の観察画像の長さを縦横1.5μm(マイクロメートル)とする。
まず、制御系1811(情報処理装置1812)は、ArFレジストのラインパターンに対し、視野の左上から右下までの走査を32回行って得られた二次電子信号強度を平均化し、2次電子信号強度の2次元分布画像を取得する。必要に応じ、情報処理装置1812は、取得した画像をCD-SEMのモニタ画面上に表示する。ここで、観察画像の画素数は、縦・横方向に1500画素、1画素の1辺を1nm(ナノメートル)、視野内の観察画像の長さを縦横1.5μm(マイクロメートル)とする。
情報処理装置1812は、2次電子信号強度の2次元分布画像のうち解析したいエッジを含む領域に、それぞれ縦1024画素、横50画素の矩形形状の検査領域を設定する。また、エッジ抽出のためのしきい値Tの最小値Tmin、最大値Tmax、増分値ΔT、データ抽出のy方向のサンプリング間隔Δy、x方向のノイズ低減パラメータ、y方向の平均化パラメータS等、データ系列抽出に必要な情報を設定する。なお、データ抽出におけるy方向のサンプリング間隔ではなく、検出点数を設定することも可能である。これらの検査領域及びデータ系列抽出の条件は、例えばCD-SEMのGUI画面等を通じ、予め設定することが望ましい。
次いで、情報処理装置1812は、領域内のエッジラフネスのデータ系列を抽出するタスクを実行する。すなわち、情報処理装置1812は、設定された抽出開始点やサンプリング間隔に従って、検査領域内の画素データからサンプリング位置でのy座標に対応する信号強度分布を算出し、更に、最小値Tminから最大値Tmaxまで増分値ΔT毎に設定したしきい値Tに応じ、上記信号強度分布からエッジ点のx座標データを算出する。これらの処理を、設定されたサンプリング間隔に従って次々にy方向へ移動しながら実行し、最終的に、しきい値Tの関数として検査領域内でのエッジラフネスのデータ系列X(T)={Δxi(T)}={Δx1(T)、Δx2(T)、…}を取得する。
具体的には、情報処理装置1812は、データ抽出開始点のy座標として、上記検査領域の下辺に対応するy座標を設定し、y方向のサンプリング間隔として1nm(ナノメートル)を設定し、検査領域内のエッジ点として1nm(ナノメートル)置きに1024個の点の位置(x1(T), y1(T)),…(xi(T), yi(T)),…(x1024(T), y1024(T))を抽出した。
次に、情報処理装置1812は、抽出された点を以下の直線で近似し、フィッティングパラメータであるαとβの値を求めた。
次に、全てのしきい値Tに対するエッジ点の座標に対し、情報処理装置1812は、以下の式11に従ってエッジ点の上記直線からのずれ量Δxiを求め、エッジラフネス系列X(T)={Δxi}Tを生成する。
(画像処理工程)
次に、情報処理装置1812は、エッジラフネス系列X(T)={Δxi(T)}からしきい値毎にLERを求め、求めたLERを真のLERによる測定ばらつきσ_yと、表面凹凸による計測ばらつきσ_xzとに分解する。エッジラフネス系列から、真のLERによる測定ばらつきσ_yと表面凹凸による計測ばらつきσ_xzを求める方法については、例えば特許文献1に記載されている方法を用いることができるが、その代表的な手段について述べるならば以下の通りである。
次に、情報処理装置1812は、エッジラフネス系列X(T)={Δxi(T)}からしきい値毎にLERを求め、求めたLERを真のLERによる測定ばらつきσ_yと、表面凹凸による計測ばらつきσ_xzとに分解する。エッジラフネス系列から、真のLERによる測定ばらつきσ_yと表面凹凸による計測ばらつきσ_xzを求める方法については、例えば特許文献1に記載されている方法を用いることができるが、その代表的な手段について述べるならば以下の通りである。
前述したように、測定されたLERには、パワースペクトル密度が空間周波数fの2乗に反比例する成分(真のLER)と、それ以外の高周波成分(ノイズ)とが重畳している。測定されたLERに平均化処理を施すと、後者の成分が減少する。このため、平均化処理の程度を表すパラメータ値を増やすのに伴い、高周波領域でのパワースペクトル密度分布がfの2乗に反比例するようになる。具体的には、異なるy座標におけるx方向の1次元信号強度分布を、y方向にS本平均化することを考えると、ランダムノイズの強度は、平均化によって1/Sに低減される。すなわち、平均化パラメータSの増加に伴って、パワースペクトル密度の周波数依存性が1/f2に近づいていく。このとき得られるパワースペクトルの密度が真のLERとなる。
ここで、平均化パラメータSで平均化処理されたデータから得られるラインエッジラフネス指標の値をσm(S)として、そのS依存性を次式にフィッティングする。
ただし、σm(1)は、平均化処理前のデータから求めたラインエッジラフネス計測値であり、Δyはエッジ点のy方向抽出間隔であり、Aはフィッティングパラメータである。S及びエッジ点の抽出間隔Δyは、2SΔy<1/f0 [nm(ナノメートル)]を満たすことが望ましい。ここで、f0は、通常のレジストパターンの場合、スペクトルの屈曲点において、0.008nm-1以下であることが多い。
ここでは、実験結果をよく説明するSの中で最も小さいSに対して求められたσ0=σを真のLERとした。この場合、空間周波数によらない計測ばらつき成分σbは、次式により求められる。
さらに、情報処理装置1812は、測定されたLERから計測誤差σ_noiseを求め、これをσb(T)から取り除くことにより、側壁表面の凹凸パターンがxy平面に投影されることによる計測ばらつき(不確定性)を示すσ_xz(T)を求めた。
ここで、構造体のしきい値Tに対応する高さにおける側壁角度θは、次式により求められる。
一方、y方向の計測範囲に対して、x方向の信号強度分布の平均<I>(x)を算出した。しきい値Tに対応するエッジ座標xは、x=<I>-1(T)より求めることができる。ただし、<I>-1は、<I>の逆関数である。
ところで、構造体の断面形状z(=Z(x))は、前述したように、次式により求めることができる。
このようにして求めた断面形状を、ウエハのパターン部を切断してSEMで観察した断面形状と比較を行ったところ、両者はよく一致することが確認された。また、AFMによる計測結果との比較も行ったが、こちらもよく一致することも確認された。
なお、上の説明ではσsとσ_noiseは物理的な意味を持つ値として、各々独立に計測して求めるとしたが、これらの量はフィッティングパラメータとして考えてもよい。すなわち、他の方法により観察した断面形状と、本発明により推定した断面形状がよく一致するような、σsとσ_noiseを用いればよい。
[実施例2]
本実施例においては、1次元マスクパターンの断面構造だけでなく、2次元マスクパターンに対しても立体的構造を推定できる方法の一例を説明する。本実施例で用いる走査形電子顕微鏡の構成は、実施例1と同様なので説明を省略する。
本実施例においては、1次元マスクパターンの断面構造だけでなく、2次元マスクパターンに対しても立体的構造を推定できる方法の一例を説明する。本実施例で用いる走査形電子顕微鏡の構成は、実施例1と同様なので説明を省略する。
実施例1の手法を2次元マスクパターンに拡張する方法には次の2つの方法が考えられる。
[第1の方法]
この方法では、実施例1の方法により1次元パターンに対してしきい値とパターン高さの関係を求め、この関係をそのまま2次元パターンに対して適用する。
[第1の方法]
この方法では、実施例1の方法により1次元パターンに対してしきい値とパターン高さの関係を求め、この関係をそのまま2次元パターンに対して適用する。
[第2の方法]
この方法では、実施例1の方法を2次元エッジ情報に対して拡張する。
まず、第1の方法について説明する。情報処理装置1812は、実施例1の方法と同様に取得した2次元画像(図16の上段左図)に対し、その1次元パターン部分に実施例1の方法を適用して断面形状z=Z(x)を求める(推定する)。
この方法では、実施例1の方法を2次元エッジ情報に対して拡張する。
まず、第1の方法について説明する。情報処理装置1812は、実施例1の方法と同様に取得した2次元画像(図16の上段左図)に対し、その1次元パターン部分に実施例1の方法を適用して断面形状z=Z(x)を求める(推定する)。
次に、情報処理装置1812は、上記z=Z(x)と、上記形状の導出に用いた信号強度分布T=I(x)の2つの関係からxを消去することにより、構造体の高さzとしきい値Tの関係z=Z’(T)を得る。図16の上段左図の2次元マスクパターンに対するSEM観察画像に対し、しきい値Tを変えてエッジを抽出すると、図16の上段中図のような等高線が得られる。
次に、情報処理装置1812は、上記構造体の高さzとしきい値Tの関係に従い、図16の上段中図のTをzに変換し、図16の上段右図のような2次元パターンの高さ情報を得る。なお、Tとzの間には、図16の下段に示す関係が成立する。この関係を与えるデータは、例えばデータ記憶装置1813に予め格納しておく。
本方法の問題は、実施例1の方法により求めた構造体の高さzとしきい値Tの関係z=Z(T)が、2次元マスクパターンの構造体において成立する保証が必ずしもないことである。一般に、高さと信号強度の関係は一意的ではない。しかしながら、ライン幅等のパターン特性が近いパターンに対しては、本方法は、比較的よい近似を与えることができる。
次に、第2の方法について説明する。本方法は、同一のマスク上の異なる複数の位置に同一の設計パターンが存在する場合に適用することができる。まず、情報処理装置1812は、マスク上の複数の同一2次元パターンについて形成された、ウエハ上の複数の2次元パターンを同一条件でSEM観察し、複数のSEM画像(信号強度分布)を得る。
これら複数のSEM画像に対し、情報処理装置1812は、あるしきい値Tで切った時のエッジ座標列を求め、各座標点を結んだ等高線を考える。この際、計測精度を確保するため、エッジの抽出は、等高線に略垂直な方向に沿った信号強度分布を求め、これに対してしきい値を適用することにより求めることが望ましい。
次に、情報処理装置1812は、上記複数の画像に対して求めた等高線間の距離偏差の総和が最小となるように、各画像を平行方向にシフトする。シフト位置の基準は、適宜設定してよい。さらに、情報処理装置1812は、平行シフト後の各画像の等高線に対して平均形状を求め、各画像の等高線に対して等高線の接線と垂直な方向に対する平均形状との差分(距離)を算出する。
情報処理装置1812は、各エッジ点に対し、差分の分布の標準偏差を求め、これを実施例1におけるσb(T)に相当する値と仮定する。これにより、実施例1と同様、式5、式6、式7、式8等を用いて求めた傾斜角θを、当該位置におけるしきい値Tに対応する高さの側壁角度θとする。しきい値Tを変えてエッジを抽出した方向に沿って、式9と同様の積分を行うことにより、上記方向に沿った縦構造を求めることができる。
第2の方法で求めたσb(T)は、真のLERに相当する成分を含むことが懸念されるが、平行シフトを行うことにより、比較的長周期のLERに起因するエッジシフトは相殺することができると期待される。さらに、真のLERの短周期成分と計測誤算成分は、上記σb(T)から適宜除去することが望ましい。
本実施例の場合にも、実施例1の場合と同様に、σsとσeは、物理的な意味を持つ値として、各々独立に計測して求めても良いし、フィッティングパラメータとして考えても良い。発明者は、このような手法により推定した構造体の断面形状が、同じ構造体を切断してSEM画像として観察した断面形状とよく一致することを確認した。
[実施例3]
本実施例では、本発明を、半導体集積回路等の製造に用いられる光リソグラフィによるレジストパターン形成プロセス、又はそれを用いて形成した半導体集積回路の立体的構造の品質評価、並びに上記プロセスモニターに適用する例について説明する。
本実施例では、本発明を、半導体集積回路等の製造に用いられる光リソグラフィによるレジストパターン形成プロセス、又はそれを用いて形成した半導体集積回路の立体的構造の品質評価、並びに上記プロセスモニターに適用する例について説明する。
本実施例では、形成されたパターンの品質指標として、推定したパターンの高さと設計上のパターンの高さの偏差の絶対値を評価領域の全面について積分した値、又は、その値の2乗平均値を用いる(図17の上段図(a)の右図にハッチングで示す部分の面積に対応する量)。
なお、より単純に、前述の実施例の手法を適用して推定した断面形状(例えば図17の上段図(a)の左図における曲線下部)の断面積Spと理想的設計形状(例えば図17の上段図(a)の左図における長方形部分)の断面積Siの比Sp/Si(1次元マスクパターンの場合)、又は、前述の実施例の手法により推定した形状の体積Vpと理想的設計形状の体積Viの比Vp/Vi(2次元マスクパターンの場合)を、パターン品質指標として用いても良い。ただし、この場合には、設計上のパターンが本来存在しないはずの領域に存在するパターンの面積又は体積を負の値で扱うことが好ましい。これにより、設計上のパターンが本来存在しないはずの領域にパターンが存在する場合にも、品質劣化として検知することができる。
2次元マスクパターンに対する理想的な設計形状には、回路パターンの設計形状、上記回路設計形状に対して光学的近接効果補正等を施したマスクパターンに対する光学シミュレーションの結果、様々な実際の露光結果に対して前述の実施例で説明した手法を適用して推定した体積のうちの最大値等を用いることができる。
パターン形成用露光装置のフォーカス及び露光量条件をウエハ上の露光ショット毎にマトリクス状に様々に変化させて露光したウエハに対し、上記露光ショット毎にマスク上の同一パターンに対するレジストパターンをCD-SEMで観察し、その観察像からショットごとにパターン寸法を測定すると共に、実施例1に記載した方法によりパターン断面形状を推定し、上記パターン品質指標を求めた。
図17の中段図(b)に示すように、パターンの寸法は、露光量に対して単調減少したが、フォーカス設定値に対するパターン寸法変化は小さく、パターン寸法変化からフォーカス設定値を推定するのは難しかった。これに対して、図17の下段図(c)に示すように、パターン品質指標は、露光量及びフォーカスの両方の設定値に対してほぼ単調に変化し、フォーカス設定値のモニタとして適用できた。ただし、パターン品質指標は、露光量に対しても変化する。そこで、まずパターン寸法変化から露光量を推定し、上記露光量に対して、パターン品質指標を用いてフォーカス設定値を推定することが望ましい。
本実施例のように、推定された断面形状を、形成されたパターンの品質指標に用いれば、簡便かつ高速に最適な製造条件を判定したり、品質低下を検知することができる。また、当該判定結果等を製造プロセスにフィードバックすれば、形成されるパターンの品質劣化を抑制し、半導体装置をはじめとする各種素子の性能を向上させることができる。
[実施例4]
本実施例では、σx、σsを求める別の方法として、xy方向の2次元信号強度分布を周波数分析する方法について説明する。すなわち、第2の実施形態による2次源立体形状の推定方法について説明する。
本実施例では、σx、σsを求める別の方法として、xy方向の2次元信号強度分布を周波数分析する方法について説明する。すなわち、第2の実施形態による2次源立体形状の推定方法について説明する。
ここでは、図18の上段図(a)のような立体構造体の側壁の全面に、表面に沿って等方的な表面凹凸が存在すると仮定し、その凹凸情報のみを、立体構造体の上方から観察する場合を想定する。このとき、図18の下段図(b)に示すパターンが凹凸情報として取得されると考えられる。
ここで、凹凸のx方向の周期をLxとし、y方向の周期をLyとすると、傾斜角θは、次式により求められる。
このとき、観察される2次電子信号の2次元強度分布は、第1にx方向のマクロな強度分布、第2にy方向の真のLERによる強度変動、第3に表面凹凸による局所的な強度変動という、3つの変動要因を含む。従って、観察像から第1及び第2の変動要因を除去することにより、第3の表面凹凸情報のみを抽出することができる。具体的な手順の1例を図19を用いて説明する。
まず、情報処理装置1812は、SEM像を取得した後、解析領域を指定し、上記領域内で2次元強度分布を取得する(ステップS1901)。次に、情報処理装置1812は、取得された2次元強度分布に対して2次元空間周波数フィルタリングを適用し、第1の変動成分による部分及び第2の変動成分の高周波成分を除いた部分の和と、第2の変動成分の高周波成分と第3の変動要因による部分の和に分解する(ステップS1902)。後者は、真のLERによる変動の高周波成分と表面凹凸による変動を含む。
一般に、構造体の側壁角θはx方向に変化するので、強度分布変動のx方向空間周期はx方向に変化する。従って、空間周期は、x方向に対して局所的に評価することが望ましい。このような解析を行う一般的な手法として、例えばウエーブレット解析がある。情報処理装置1812は、x方向にウエーブレット解析を行うことにより、x方向に沿った空間周波数特性の変化を検出する(ステップS1903)。
この方法により得られた空間周波数特性(パワースペクトル密度PSDの空間周波数依存性)のx依存性の一例を図20に示す。空間周波数特性は、xに依存して変化し、特性にピークが得られる場合にはピーク位置の周波数を代表空間周波数とし、ピークが明確でない場合には空間周波数の分布広がり(例えば半値幅)を代表空間周波数とし、その逆数によりx方向の空間周期σxを求める。同様に、情報処理装置1812は、y方向に空間周波数解析を行うことにより求めた代表空間周波数からσyを求める。更に、情報処理装置1812は、xy両方向に2次元のウエーブレット解析を行ってもよい。なお、この過程において、必要に応じ、情報処理装置1812は、第2の変動成分の高周波成分を推定し、後者から除去する。このようにして、情報処理装置1812は、σxとσyの2次元分布を求める。
情報処理装置1812は、側壁角の2次元分布θ(x、y)を次式より求める(ステップS1904)。
さらに、情報処理装置1812は、上式を位置(x、y)で積分することにより2次元立体形状を推定する(ステップS1905)。
[実施例5]
本実施例では、構造体の表面に形成された凹凸パターンが必ずしも等方的でない場合について説明する。構造体表面の凹凸パターンが等方的であるという前提が成り立たないケースには、例えばレジスト構造体の側壁形状が、レジスト膜内における露光光の干渉による定在波の影響を受ける場合がある。この場合、2次電子信号強度分布は、図21に示すように、構造体の1本のエッジに対して、平行する複数のエッジとして観察される。この場合、複数エッジ間の側壁傾斜角度は、エッジ間隔をΔLxとして、次式で表される。
本実施例では、構造体の表面に形成された凹凸パターンが必ずしも等方的でない場合について説明する。構造体表面の凹凸パターンが等方的であるという前提が成り立たないケースには、例えばレジスト構造体の側壁形状が、レジスト膜内における露光光の干渉による定在波の影響を受ける場合がある。この場合、2次電子信号強度分布は、図21に示すように、構造体の1本のエッジに対して、平行する複数のエッジとして観察される。この場合、複数エッジ間の側壁傾斜角度は、エッジ間隔をΔLxとして、次式で表される。
ただし、λは当該レジストパターンの露光に用いられた光の波長であり、nは上記波長の光に対する上記レジスト材料の屈折率である。定在波は、レジスト露光時にレジスト下地膜からの反射が大きいと出現するが、この場合、レジスト膜厚の変動によりレジスト寸法が敏感に変動する。これは、実際の生産工程では望ましいことではないので、通常これを抑制するために十分な反射防止策がなされる。このため、実際には上記のような定在波が影響することは少ない。
表面凹凸が等方的である前提が必ずしも成立しない別のケースとして、等方的な表面凹凸を有するレジストパターンをエッチングして被エッチング構造を転写する場合がある。レジストパターン表面の凹凸は、エッチングにより被エッチング膜の構造体表面に転写されるが、エッチング転写後の構造体のラフネス解析によれば、被エッチング構造体のラフネスは、レジスト構造体のラフネスをほぼ反映したものであることが多い。
この場合、図22に示すように、凹凸のエッジ方向(y方向)の周期は変わらないが、縦方向の寸法は変化する。ここで、レジスト材料のエッチング速度Vrと被エッチング膜のエッチング速度Veの比をRetch=Ve/Vrとして、エッチングが完全に異方的であるとすると、凹凸の縦方向寸法はおよそRetch倍となると考えられる。この場合、側壁角度が比較的急峻であると仮定すると、式5におけるLもRetch倍すればよい。
実際には、エッチングはエッジ方向と垂直な方向(x方向)にも進行する(エッチング)。この場合、凹凸の縦横寸法比は必ずしもRetchに等しくない。従って、例えば他の方法により観察した断面形状と、前述した手法により推定した断面形状がよく一致するように、式5におけるLをフィッティングパラメータとして最適化する等することが好ましい。
なお、本発明の最も一般的な概念は、構造体を上面から観察した2次元画像の信号強度分布の局所的なばらつきの情報から、構造体の立体形状を推定することである。従って、推定アルゴリズムは上記に示した方法に限らない。
(他の実施例)
なお、本発明は上述した実施例に限定されるものでなく、様々な変形例を含んでいる。例えば上述した実施例は、本発明を分かりやすく説明するために、一部の実施例について詳細に説明したものであり、必ずしも説明した全ての構成を備える必要は無い。また、ある実施例の一部を他の実施例の構成に置き換えることが可能であり、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成を追加、削除又は置換することも可能である。
なお、本発明は上述した実施例に限定されるものでなく、様々な変形例を含んでいる。例えば上述した実施例は、本発明を分かりやすく説明するために、一部の実施例について詳細に説明したものであり、必ずしも説明した全ての構成を備える必要は無い。また、ある実施例の一部を他の実施例の構成に置き換えることが可能であり、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成を追加、削除又は置換することも可能である。
また、上述した各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路その他のハードウェアとして実現しても良い。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することにより実現しても良い。すなわち、ソフトウェアとして実現しても良い。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリやハードディスク、SSD(Solid State Drive)等の記憶装置、ICカード、SDカード、DVD等の記憶媒体に格納することができる。
また、制御線や情報線は、説明上必要と考えられるものを示すものであり、製品上必要な全ての制御線や情報線を表すものでない。実際にはほとんど全ての構成が相互に接続されていると考えて良い。
1801…走査型電子線顕微鏡の筐体
1802…電子銃
1803…電子線
1804…収束レンズ
1805…偏向器
1806…対物レンズ
1807…観察ウエハ
1808…ステージ
1809…二次電子
1810…検出器
1811…制御系
1812…情報処理装置
1813…データ記憶装置
1802…電子銃
1803…電子線
1804…収束レンズ
1805…偏向器
1806…対物レンズ
1807…観察ウエハ
1808…ステージ
1809…二次電子
1810…検出器
1811…制御系
1812…情報処理装置
1813…データ記憶装置
Claims (10)
- 計算機に、
立体的な構造体が上面に形成された基板の主面に略垂直な方向から収束エネルギー線を照射するとともに上記基板の上面を走査させ、上記基板及び上記構造体から発生した2次エネルギー線又は上記基板及び上記構造体により反射若しくは散乱されたエネルギー線の強度を検出及び/又は測定し、上記構造体の上面観察像を取得する処理と、
上記上面観察像における収束エネルギー線の照射位置と測定された上記強度から上記構造体の表面の凹凸形状による散乱強度の不確かさ情報を求める処理と、
求めた上記不確かさ情報に基づいて上記構造体の表面の傾斜角度θを求める処理と、
求めた傾斜角度θに基づいて上記構造体の立体形状を推定する処理と
を実行させるパターン形状評価方法。 - 請求項1に記載のパターン形状評価方法において、
上記収束エネルギー線は収束電子線であり、上記2次エネルギー線は2次電子である
ことを特徴とするパターン形状評価方法。 - 請求項1に記載のパターン形状評価方法において、
上記不確かさ情報を求める処理は、
上記2次エネルギー線の強度の異なる複数のレベルに対応して複数のエッジ点列を抽出し、上記複数のエッジ点列の各座標の設計座標からのずれを算出してエッジ点の変動値を算出するサブ処理と、
上記変動値に基づいて、上記異なる複数のレベルに対応する上記上面観察像上の各位置における前記構造体の表面の傾斜角度を求めるサブ処理と
を有することを特徴とするパターン形状評価方法。 - 請求項3に記載のパターン形状評価方法において、
上記エッジ点の変動値を算出するサブ処理は、
上記複数のエッジ点列の空間周波数に依存しない成分を求める工程、
上記エッジ点列からそのパワースペクトルが空間周波数の2乗に反比例する成分を除去する工程、又は、
検出されたノイズ成分を除去する工程
を有することを特徴とするパターン形状評価方法。 - 請求項1に記載のパターン形状評価方法において、
上記傾斜角度θを求める処理は、
上記上面観察像のある所定の領域内において、上記不確かさ情報σxの関数として、上記領域の前記基板の主面に対する傾斜角度θを求める
ことを特徴とするパターン形状評価方法。 - 請求項1に記載のパターン形状評価方法において、
上記傾斜角度θを求める処理は、
上記上面観察像の上記強度の分布に対して異なる複数のしきい値を設定し、各しきい値に対して複数のエッジ点列を抽出することにより求めた傾斜角度θを、上記複数のエッジ点列の各エッジ位置における傾斜角度θとし、
上記立体形状を推定する処理は、
上記上面観察像の各点における傾き角度分布を求め、上記傾き角度分布を積分することにより立体形状を推定する
ことを特徴とするパターン形状評価方法。 - 請求項1に記載のパターン形状評価方法において、
上記不確かさ情報を求める処理は、
前記上面観察像内の局所領域における2次エネルギー線の強度変動のエッジに垂直及び平行な方向に対する空間周波数特性の差に基づいて、上記局所領域における前記構造体の表面の傾斜角度を求めるサブ処理を含む
ことを特徴とするパターン形状評価方法。 - 請求項3に記載のパターン形状評価方法において、
上記エッジは曲線である
ことを特徴とするパターン形状評価方法。 - 計算機に、
半導体装置を含む立体的な構造体が上面に形成された基板の主面に略垂直な方向から収束エネルギー線を照射するとともに上記基板の上面上を走査させ、上記基板及び上記構造体から発生した2次エネルギー線又は上記基板及び上記構造体により反射若しくは散乱されたエネルギー線の強度を検出及び/又は測定し、上記構造体の上面観察像を取得する処理と、
上記上面観察像における収束エネルギー線の照射位置と測定された上記強度から上記構造体の表面の凹凸形状による散乱強度の不確かさ情報を求める処理と、
求めた上記不確かさ情報に基づいて上記構造体の表面の傾斜角度θを求める処理と、
求めた傾斜角度θに基づいて上記構造体の立体形状を推定する処理と
推定された上記立体形状の特徴に基づいて上記半導体装置の製造工程における製造条件を推定する処理と
を実行させる半導体装置の製造方法。 - 立体的な構造体が上面に形成された基板の主面に略垂直な方向から収束エネルギー線を照射するとともに上記基板の上面上を走査させ、上記基板及び上記構造体から発生した2次エネルギー線又は上記基板及び上記構造体により反射若しくは散乱されたエネルギー線の強度を検出及び/又は測定し、上記構造体の上面観察像を取得するデータ処理部と、
上記上面観察像における収束エネルギー線の照射位置と測定された上記強度から上記構造体の表面の凹凸形状による散乱強度の不確かさ情報を求めるデータ処理部と、
求めた上記不確かさ情報に基づいて上記構造体の表面の傾斜角度θを求めるデータ処理部と、
求めた傾斜角度θに基づいて上記構造体の立体形状を推定するデータ処理部と
を有するパターン形状評価装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012287906A JP2014130077A (ja) | 2012-12-28 | 2012-12-28 | パターン形状評価方法、半導体装置の製造方法及びパターン形状評価装置 |
| TW102144629A TWI502165B (zh) | 2012-12-28 | 2013-12-05 | A pattern shape evaluation method, a manufacturing method of a semiconductor device, and a pattern shape evaluation device |
| KR1020157016060A KR101727950B1 (ko) | 2012-12-28 | 2013-12-25 | 패턴 형상 평가 방법, 반도체 장치의 제조 방법 및 패턴 형상 평가 장치 |
| PCT/JP2013/084580 WO2014104055A1 (ja) | 2012-12-28 | 2013-12-25 | パターン形状評価方法、半導体装置の製造方法及びパターン形状評価装置 |
| US14/652,624 US9449790B2 (en) | 2012-12-28 | 2013-12-25 | Pattern shape evaluation method, semiconductor device manufacturing method, and pattern shape evaluation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012287906A JP2014130077A (ja) | 2012-12-28 | 2012-12-28 | パターン形状評価方法、半導体装置の製造方法及びパターン形状評価装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014130077A true JP2014130077A (ja) | 2014-07-10 |
Family
ID=51021134
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012287906A Pending JP2014130077A (ja) | 2012-12-28 | 2012-12-28 | パターン形状評価方法、半導体装置の製造方法及びパターン形状評価装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9449790B2 (ja) |
| JP (1) | JP2014130077A (ja) |
| KR (1) | KR101727950B1 (ja) |
| TW (1) | TWI502165B (ja) |
| WO (1) | WO2014104055A1 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019173170A1 (en) * | 2018-03-05 | 2019-09-12 | Kla-Tencor Corporation | Visualization of three-dimensional semiconductor structures |
| JP2020519902A (ja) * | 2017-05-17 | 2020-07-02 | アプライド マテリアルズ イスラエル リミテッド | 製造プロセス欠陥を検出するための方法、コンピュータプログラム製品およびシステム |
| US10794839B2 (en) | 2019-02-22 | 2020-10-06 | Kla Corporation | Visualization of three-dimensional semiconductor structures |
| WO2020203104A1 (ja) * | 2019-03-29 | 2020-10-08 | キヤノン株式会社 | 計測装置、パターン形成装置および物品の製造方法 |
| US11276554B2 (en) | 2019-08-07 | 2022-03-15 | Hitachi High-Tech Corporation | Scanning electron microscope and method for measuring pattern |
| US11302513B2 (en) | 2018-04-06 | 2022-04-12 | Hitachi High-Tech Corporation | Electron microscope apparatus, inspection system using electron microscope apparatus, and inspection method using electron microscope apparatus |
| JP2022114213A (ja) * | 2021-01-26 | 2022-08-05 | キオクシア株式会社 | 近接効果補正方法、原版製造方法および描画装置 |
| JP2022125282A (ja) * | 2017-09-27 | 2022-08-26 | エーエスエムエル ネザーランズ ビー.ブイ. | デバイス製造方法の制御パラメータを決定する方法 |
| US11545336B2 (en) | 2018-04-06 | 2023-01-03 | Hitachi High-Tech Corporation | Scanning electron microscopy system and pattern depth measurement method |
| JP2023103539A (ja) * | 2022-01-14 | 2023-07-27 | 株式会社日立ハイテク | プロセッサシステム、半導体検査システム、およびプログラム |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102143803B1 (ko) * | 2016-09-01 | 2020-08-12 | 주식회사 히타치하이테크 | 화상 해석 장치 및 하전 입자선 장치 |
| KR102194154B1 (ko) * | 2016-09-01 | 2020-12-22 | 주식회사 히타치하이테크 | 패턴 계측 장치 |
| US10748272B2 (en) * | 2017-05-18 | 2020-08-18 | Applied Materials Israel Ltd. | Measuring height difference in patterns on semiconductor wafers |
| JP2019039884A (ja) * | 2017-08-29 | 2019-03-14 | 株式会社日立ハイテクノロジーズ | パターン測定方法、及びパターン測定装置 |
| JP6871833B2 (ja) * | 2017-09-19 | 2021-05-12 | キオクシア株式会社 | 形状計測装置および形状計測方法 |
| CN116473517A (zh) * | 2017-11-16 | 2023-07-25 | 布鲁恩生物有限责任公司 | 使用表皮下水分值对压力性溃疡进行战略治疗 |
| KR101813624B1 (ko) * | 2017-11-17 | 2017-12-29 | 한전원자력연료 주식회사 | EBSD pattern quality를 활용한 핵연료용 지르코늄 합금 피복관 재결정도 측정방법 |
| JP7074489B2 (ja) | 2018-02-08 | 2022-05-24 | 株式会社Screenホールディングス | データ処理方法、データ処理装置、および、データ処理プログラム |
| US10679372B2 (en) * | 2018-05-24 | 2020-06-09 | Lowe's Companies, Inc. | Spatial construction using guided surface detection |
| US10890852B2 (en) | 2018-11-08 | 2021-01-12 | Applied Materials, Inc. | Signal recognition during substrate patterning via digital photolithography |
| KR102453077B1 (ko) * | 2018-11-12 | 2022-10-11 | 주식회사 히타치하이테크 | 결함의 발생을 추정하는 시스템, 및 컴퓨터 가독 매체 |
| US11133152B2 (en) * | 2019-03-21 | 2021-09-28 | Applied Materials, Inc. | Methods and apparatus for performing profile metrology on semiconductor structures |
| WO2020237105A1 (en) | 2019-05-21 | 2020-11-26 | Applied Materials, Inc. | Enhanced cross sectional features measurement methodology |
| CN114599934B (zh) * | 2019-10-31 | 2024-10-11 | 卡尔蔡司Smt有限责任公司 | 用于测量har结构的形状偏差的fib-sem 3d断层成像术 |
| JP7285885B2 (ja) * | 2021-07-07 | 2023-06-02 | 日本電子株式会社 | 電子顕微鏡及び画像生成方法 |
| US12189915B2 (en) | 2022-06-24 | 2025-01-07 | Lowe's Companies, Inc. | Simulated environment for presenting virtual objects and virtual resets |
| US12211161B2 (en) | 2022-06-24 | 2025-01-28 | Lowe's Companies, Inc. | Reset modeling based on reset and object properties |
| CN116468692B (zh) * | 2023-04-19 | 2025-08-19 | 西安电子科技大学 | 基于脑电信号和结构不确定性的图像质量评价方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4094327B2 (ja) * | 2002-04-10 | 2008-06-04 | 株式会社日立ハイテクノロジーズ | パターン計測方法及びパターン計測装置、並びにパターン工程制御方法 |
| JP3841024B2 (ja) * | 2002-06-13 | 2006-11-01 | 株式会社日立製作所 | 立体形状測定装置及びエッチングの条件出し方法 |
| JP4364524B2 (ja) | 2003-02-20 | 2009-11-18 | 株式会社日立製作所 | パターン検査方法 |
| JP4500653B2 (ja) | 2003-11-25 | 2010-07-14 | 株式会社日立ハイテクノロジーズ | 試料の観察方法及びその装置 |
| JP4801427B2 (ja) | 2005-01-04 | 2011-10-26 | 株式会社日立ハイテクノロジーズ | パターン形状評価方法 |
| JP4382030B2 (ja) * | 2005-11-15 | 2009-12-09 | 富士通マイクロエレクトロニクス株式会社 | 半導体装置及びその製造方法 |
| WO2007067296A2 (en) | 2005-12-02 | 2007-06-14 | Alis Corporation | Ion sources, systems and methods |
| JP4920268B2 (ja) | 2006-02-23 | 2012-04-18 | 株式会社日立ハイテクノロジーズ | 半導体プロセスモニタ方法およびそのシステム |
| TWI585806B (zh) * | 2008-04-11 | 2017-06-01 | 荏原製作所股份有限公司 | 試料觀察方法與裝置,及使用該方法與裝置之檢查方法與裝置 |
| JP5203787B2 (ja) | 2008-04-17 | 2013-06-05 | 株式会社日立ハイテクノロジーズ | データ解析装置 |
| JP5030906B2 (ja) * | 2008-09-11 | 2012-09-19 | 株式会社日立ハイテクノロジーズ | 走査荷電粒子顕微鏡を用いたパノラマ画像合成方法およびその装置 |
| JP5315040B2 (ja) * | 2008-12-26 | 2013-10-16 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置及び荷電粒子線装置による画像取得条件決定方法 |
| WO2010095392A1 (ja) * | 2009-02-20 | 2010-08-26 | 株式会社日立ハイテクノロジーズ | 試料観察方法および走査電子顕微鏡 |
| JP5386446B2 (ja) * | 2010-07-13 | 2014-01-15 | 株式会社日立ハイテクノロジーズ | 画像データ解析装置 |
| JP2012173028A (ja) * | 2011-02-18 | 2012-09-10 | Hitachi High-Technologies Corp | パターン形状計測方法及びその装置 |
-
2012
- 2012-12-28 JP JP2012287906A patent/JP2014130077A/ja active Pending
-
2013
- 2013-12-05 TW TW102144629A patent/TWI502165B/zh active
- 2013-12-25 KR KR1020157016060A patent/KR101727950B1/ko active Active
- 2013-12-25 WO PCT/JP2013/084580 patent/WO2014104055A1/ja not_active Ceased
- 2013-12-25 US US14/652,624 patent/US9449790B2/en active Active
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020519902A (ja) * | 2017-05-17 | 2020-07-02 | アプライド マテリアルズ イスラエル リミテッド | 製造プロセス欠陥を検出するための方法、コンピュータプログラム製品およびシステム |
| JP7159212B2 (ja) | 2017-05-17 | 2022-10-24 | アプライド マテリアルズ イスラエル リミテッド | 製造プロセス欠陥を検出するための方法、コンピュータプログラム製品およびシステム |
| JP2022125282A (ja) * | 2017-09-27 | 2022-08-26 | エーエスエムエル ネザーランズ ビー.ブイ. | デバイス製造方法の制御パラメータを決定する方法 |
| US12197136B2 (en) | 2017-09-27 | 2025-01-14 | Asml Netherlands B.V. | Method of determining control parameters of a device manufacturing process |
| TWI837495B (zh) * | 2017-09-27 | 2024-04-01 | 荷蘭商Asml荷蘭公司 | 器件製造程序中的方法 |
| JP7438275B2 (ja) | 2017-09-27 | 2024-02-26 | エーエスエムエル ネザーランズ ビー.ブイ. | デバイス製造方法の制御パラメータを決定する方法 |
| US11768442B2 (en) | 2017-09-27 | 2023-09-26 | Asml Netherlands B.V. | Method of determining control parameters of a device manufacturing process |
| CN111837226B (zh) * | 2018-03-05 | 2024-03-08 | 科磊股份有限公司 | 三维半导体结构的可视化 |
| CN111837226A (zh) * | 2018-03-05 | 2020-10-27 | 科磊股份有限公司 | 三维半导体结构的可视化 |
| WO2019173170A1 (en) * | 2018-03-05 | 2019-09-12 | Kla-Tencor Corporation | Visualization of three-dimensional semiconductor structures |
| US11302513B2 (en) | 2018-04-06 | 2022-04-12 | Hitachi High-Tech Corporation | Electron microscope apparatus, inspection system using electron microscope apparatus, and inspection method using electron microscope apparatus |
| US11545336B2 (en) | 2018-04-06 | 2023-01-03 | Hitachi High-Tech Corporation | Scanning electron microscopy system and pattern depth measurement method |
| US11099137B2 (en) | 2019-02-22 | 2021-08-24 | Kla Corporation | Visualization of three-dimensional semiconductor structures |
| US10794839B2 (en) | 2019-02-22 | 2020-10-06 | Kla Corporation | Visualization of three-dimensional semiconductor structures |
| WO2020203104A1 (ja) * | 2019-03-29 | 2020-10-08 | キヤノン株式会社 | 計測装置、パターン形成装置および物品の製造方法 |
| US11276554B2 (en) | 2019-08-07 | 2022-03-15 | Hitachi High-Tech Corporation | Scanning electron microscope and method for measuring pattern |
| JP2022114213A (ja) * | 2021-01-26 | 2022-08-05 | キオクシア株式会社 | 近接効果補正方法、原版製造方法および描画装置 |
| JP7549540B2 (ja) | 2021-01-26 | 2024-09-11 | キオクシア株式会社 | 近接効果補正方法、原版製造方法および描画装置 |
| JP2023103539A (ja) * | 2022-01-14 | 2023-07-27 | 株式会社日立ハイテク | プロセッサシステム、半導体検査システム、およびプログラム |
| JP7728711B2 (ja) | 2022-01-14 | 2025-08-25 | 株式会社日立ハイテク | プロセッサシステム、半導体検査システム、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI502165B (zh) | 2015-10-01 |
| US20160035538A1 (en) | 2016-02-04 |
| KR20150087327A (ko) | 2015-07-29 |
| KR101727950B1 (ko) | 2017-04-18 |
| WO2014104055A1 (ja) | 2014-07-03 |
| TW201439501A (zh) | 2014-10-16 |
| US9449790B2 (en) | 2016-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101727950B1 (ko) | 패턴 형상 평가 방법, 반도체 장치의 제조 방법 및 패턴 형상 평가 장치 | |
| JP3834495B2 (ja) | 微細パターン検査装置、cd−sem装置の管理装置、微細パターン検査方法、cd−sem装置の管理方法、プログラムおよびコンピュータ読み取り可能な記録媒体 | |
| JP5319931B2 (ja) | 電子顕微鏡システム及びそれを用いたパターン寸法計測方法 | |
| US7095884B2 (en) | Method and apparatus for circuit pattern inspection | |
| JP4801427B2 (ja) | パターン形状評価方法 | |
| JP5433522B2 (ja) | 電子顕微鏡を用いたパターン寸法計測方法、パターン寸法計測システム並びに電子顕微鏡装置の経時変化のモニタ方法 | |
| KR102194154B1 (ko) | 패턴 계측 장치 | |
| TWI698705B (zh) | 圖案測定方法、及圖案測定裝置 | |
| JP2006215020A5 (ja) | ||
| JP7169976B2 (ja) | Cd-sem走査型電子顕微鏡によるキャラクタリゼーションのための方法 | |
| TW201535555A (zh) | 圖案測定裝置及電腦程式 | |
| JP7167323B2 (ja) | パターン計測装置および計測方法 | |
| TWI697025B (zh) | 帶電粒子線裝置,截面形狀推定程式 | |
| JP5880134B2 (ja) | パターン計測方法およびパターン計測装置 | |
| JP6995855B2 (ja) | Cd-semキャラクタリゼーション技術を実装するための方法 | |
| JP2017102039A (ja) | パターン計測プログラム、パターン計測方法および装置 | |
| JP4961500B2 (ja) | パターン形状評価装置 | |
| JP2013200319A (ja) | 電子顕微鏡システム及びそれを用いたパターン寸法計測方法 | |
| Chen et al. | Robust surface reconstruction in SEM using two BSE detectors | |
| JP2016217816A (ja) | パターン計測装置、パターン計測方法およびパターン計測プログラム | |
| WO2025026619A1 (en) | Method for obtaining measurements of semiconductor structures from a single wedge cut of an inspection volume |