以下、図面を参照して本発明を実施するための形態について説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付し、重複する説明を省略する。
((画像形成装置の構成))
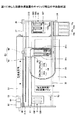
まず、本発明に係る液滴吐出装置の一例である画像形成装置の例について図1及び図2を参照して説明する。図1は画像形成装置1の全体構成を説明する側面概略図、図2は図1に示した画像形成装置のキャリッジ周辺の平面説明図(上面図)である。
この画像形成装置はシリアル型インクジェット記録装置である。図1、2に示す画像形成装置1は、主に、画像形成部、給紙部A、搬送部B、排紙部C、維持回復部Dなどを備えている。
図2に示すように、画像形成部において、画像形成装置1の左右の側面には、側板21A、21Bが配列されている。側板21A,21Bにはガイドロッド31、32が横架されている。本発明に係る液滴吐出装置が搭載されたキャリッジ33は、ガイドロッド31、32により主走査方向に摺動自在に保持されている。キャリッジ33は、主走査駆動部62によって駆動される駆動プーリ38と、従動プーリ39との間に掛け渡されるタイミングベルト37を介して、図2の矢印で示したキャリッジ主走査方向に移動走査する。
ヘッド移動手段であるキャリッジ33は、ブラック(K)、シアン(C)、マゼンタ(M)、イエロー(Y)の各色のインク滴を吐出する複数の液滴吐出ヘッド(34k,34c),及び(34m、34y)からなる記録ヘッド34A,34Bを含むヘッド部34を有する。
各記録ヘッド34A,34Bには、複数のノズルからなるノズル列(各色に対応する液滴吐出ヘッド(34k,34c),及び(34m、34y)が、主走査方向と直交する副走査方向に配列されている。このキャリッジ33は、ノズル列のインク滴吐出方向を下方に向くように装着されている。
図2に示す記録ヘッド34A,34Bは、それぞれ2つのノズル列を有している、即ち、2つの液滴吐出ヘッドから構成されている。記録ヘッド34Aの一方のノズル列はブラック(K)の液滴を、他方のノズル列はシアン(C)の液滴を吐出する。記録ヘッド34Bの一方のノズル列はマゼンタ(M)の液滴を、他方のノズル列はイエロー(Y)の液滴を、吐出する。
なお、別の構成として、1つのノズル面に複数のノズルを並べた各色のノズル列を備える記録ヘッド(1つの記録ヘッドに1つの液滴吐出ヘッド)などを用いてもよい。あるいは、1つの記録ヘッドに4色の液滴吐出ヘッドを設けてもよい。
キャリッジ33には、液滴吐出ヘッド(34k,34c)からなる記録ヘッド34A,及び(34m、34y)からなる記録ヘッド34Bのノズル列に対応して各色のインクを供給するサブタンク35a、35bを搭載している。このサブタンク35には、カートリッジ装填部24に着脱自在に装着される各色のインクカートリッジ(メインタンク)10y、10m、10c、10kから、供給ポンプユニット24によって各色の供給チューブ36を介して、各色の記録液が補充供給される。
キャリッジ33の近傍には、スリット(目盛り)を形成したエンコーダスケール67が主走査方向に沿って設けられている。また、キャリッジ33にはエンコーダスケール67のスリットを検出するエンコーダセンサ68が設けられ、これらがキャリッジ33の主走査方向位置を検知するための主走査エンコーダ(リニアエンコーダ)63を構成している。
また、キャリッジ33には、用紙端を検出するための用紙幅センサが設けられている。キャリッジ走査時に用紙の両端エッジを用紙幅センサで検出し、用紙端を検出したときのキャリッジ33の主走査方向位置を検出することで、左右の用紙端を検出した位置の差分から用紙幅を検出できるようになっている。
また、図1を参照して、給紙部は、用紙積載部41を有する給紙トレイ2、給紙コロ43、分離パッド44、ガイド部材45、カウンタローラ46、搬送ガイド47、先端加圧コロ49を有する押さえ部材48を備えている。給紙コロ43に対向し摩擦係数の大きな材質からなる分離パッド44が給紙コロ43側に付勢されている状態で、用紙42は、用紙積載部41から1枚ずつ分離給送される。そして、この給紙トレイ2から給紙された用紙42は、ガイド部材45に案内され、カウンタローラ46と、搬送ガイド47と、先端加圧コロ49を有する押さえ部材48により、ヘッド部34の下側に送り込まれる。
また、搬送部は、搬送ベルト51、搬送ローラ52、テンションローラ53を備えている。搬送ベルト51は給送された用紙Pを静電吸着してヘッド部34に対向する位置で搬送する。搬送ベルト51は、無端状ベルトであり、搬送ローラ52とテンションローラ53との間に掛け渡されており、図示しない副走査モータによってタイミングよく搬送ローラ52が回転駆動されることによって図2のベルト搬送方向(副走査方向)に周回移動する。
また、この搬送ベルト51の表面を帯電させる帯電手段として、帯電ローラ56が配置されている。この帯電ローラ56は、搬送ベルト51の表層に接触し、搬送ベルト51の回動に従動して回転するように配置されている。
さらに、ヘッド部34で記録された用紙Pを排紙する排紙部として、搬送ベルト51から用紙42を分離する分離爪161と、排紙ローラ162及び排紙コロである拍車163とを備え、排紙ローラ162の下方に排紙トレイ3を備えている。
また、画像形成装置1の装置本体の背面部には両面ユニット171が着脱自在に装着されている。この両面ユニット171は搬送ベルト51の逆方向回転で戻される用紙42を取り込んで反転させて再度、カウンタローラ46と搬送ベルト51との間に給紙する。また、この両面ユニット171の上面は手差しトレイ172としている。
さらに、キャリッジ33の走査方向の一方側の非印字領域には、液滴吐出ヘッド(34k,34c)からなる記録ヘッド34A,及び(34m、34y)からなる記録ヘッド34Bのノズルの状態を維持し、回復する維持回復機構181が配置されている。この維持回復機構181は、キャップ182a、182b、ワイパーブレード183、空吐出受け184、キャリッジロック187などを備えている。キャップ182a,182bは液滴吐出ヘッド(34k,34c)からなる記録ヘッド34A,及び(34m、34y)からなる記録ヘッド34Bの各ノズル面をキャッピングする。ワイパーブレード183はノズル面をワイピングする。空吐出受け184は、増粘した記録液を排出するために記録に寄与しない液滴を吐出させる空吐出を行うときの液滴を受ける。キャリッジロック187はキャリッジ33の位置を固定する。このヘッドの維持回復機構181の下方側には維持回復動作によって生じる廃液を収容する廃液タンク100が装置本体に対して交換可能に装着されている。
また、キャリッジ33の走査方向の他方側の非印字領域には、記録中などに増粘した記録液を排出するために記録に寄与しない液滴を吐出させる空吐出を行うときの液滴を受ける空吐出受け88が配置されている。この空吐出受け88は、記録ヘッド34A,34Bのノズル列方向に沿った開口部89などを備えている。
このように構成したこの画像形成装置でのプリント動作について説明する。給紙トレイ2から1枚ずつ分離給紙され略鉛直上方に給紙された用紙Pは、ガイド部材45で案内され、搬送ベルト51とカウンタローラ46との間に挟まれて搬送され、更に先端を搬送ガイド47で案内される。その後、先端加圧コロ49で搬送ベルト51に押し付けられ、略90°搬送方向を転換される。
このとき、帯電ローラ56に対してプラス出力とマイナス出力とが交互に繰り返すように電圧が印加されて、帯電ローラ56が交番電流による帯電電圧パターンを用いて搬送ベルト51を帯電する。この帯電した搬送ベルト51上に用紙Pが給送されると、用紙Pが搬送ベルト51に吸着され、搬送ベルト51の周回移動によって用紙42が副走査方向に搬送される。
そこで、キャリッジ33を移動させながら画像信号に応じてヘッド部34を駆動することにより、キャリッジ33を搬送ベルト51の上の位置に動かし、停止している用紙42にインク滴を吐出して1行分の画像形成を行う。用紙Pが搬送ベルト51により所定量搬送された後、キャリッジ33が次の行の画像形成を行う。画像形成終了信号又は用紙42の後端が記録領域に到達した信号を受けることにより、キャリッジ33の画像形成動作を終了して、用紙Pを排紙トレイ3に排紙する。
そして、記録ヘッド34A,34Bのノズルの維持回復を行うときには、キャリッジ33をホーム位置である維持回復機構181に対向する位置に移動させる。維持回復機構181は、キャップ182a,182bによるキャッピングを行ってノズルからの吸引を行うノズル吸引、画像形成に寄与しない液滴を吐出する空吐出動作などの維持回復動作を行う。このような動作により、安定した液滴吐出による画像形成を行うことができる。
このようなインクジェット記録装置からなる画像形成装置において、下記に説明する本発明を実施した液滴吐出装置を搭載しているので、高粘度インクを用いた普通紙高画質記録を高速で行うことができる。
((液滴吐出ヘッドの構成))
次に、本発明の一実施形態である、記録ヘッドを構成している液滴吐出ヘッドの一例について図3、図4を参照して説明する。なお、図3は液滴吐出ヘッドの液室長手方向に沿う断面説明図、図4は図3の液滴吐出ヘッドの液室短手方向(ノズルの並び方向)の断面説明図である。
各色のヘッドである液滴吐出ヘッドでは、流路板101と、この流路板101の下面に接合した振動板102と、流路板101の上面に接合したノズル板103とが接合して積層されている。これらによって液滴(インク滴)を吐出するノズル104、ノズル連通路105、圧力発生室である加圧液室106、流体供給路(抵抗部)107、共通液室108、インク供給口109などを形成している。
加圧液室(圧力室)106のインクは、ノズルと連通する流路であるノズル連通路105を通って、ノズル104から吐出される。その後、インク滴吐出の終了に伴い、加圧液室106内のインク圧力が低減し、インクの流れの慣性と駆動パルスの放電過程によって加圧液室106内に負圧が発生してインク充填工程へ移行する。このとき、インクタンク(サブタンク)35から供給されたインクは共通液室108に流入し、共通液室108からインク供給口109を経てインク供給路107を通り、加圧液室106内に充填される。
また、液滴吐出ヘッドは、振動板102を変形させて加圧液室106内のインクを加圧する圧力発生手段(アクチュエータ手段)であり、電気機械変換素子として機能する2個(図3では1列のみ図示)の積層型圧電部材121を備えている。
また、この圧電部材121を接合固定し、圧電部材121などとともにアクチエーターユニットを構成するベース基板122が配置されている。この圧電部材121では、分割しないスリット加工で溝を形成することで複数の圧電素子121、支柱部材123が形成されている。この例では、圧電素子121は駆動波形を印加する駆動圧電素子柱とし、支柱部材123は駆動波形を印加しない非駆動圧電素子柱としている。また、圧電部材121の圧電素子121には図示しない各圧電素子121Aに選択的に駆動波形を印加する駆動回路(駆動IC)と接続したFPCケーブル126が接続されている。
圧電部材121の一端面の端面電極はハーフカットによるダイシング加工で分割されて個別電極154となり、他端面の端面電極は切り欠き等の加工による制限で分割されずにすべての圧電素子121で導通した共通電極153となる。共通電極153は、圧電素子121の端部に電極層を設けて回し込んでFPCケーブル126のグラウンド(GND)電極に接続している。
そして、振動板102の周縁部がフレーム部材130に接合されている。フレーム部材130には、圧電部材121やベース基板122等からなるアクチュエータユニットを収納する貫通部131と、共通液室108として機能する凹部と、共通液室108に外部からインクを供給する供給口であるインク供給穴132とが形成されている。
図5(a)は、記録ヘッド(例えば34A)をいわゆるノズル方向から見た平面図(底面図)である。これに対して、図5(b)は、記録ヘッド34Aを側面から見た側面図である。
以下、記録ヘッド34Aが有するノズル104が並ぶ方向(図では、左右方向に相当する。)をx軸とする。さらに、x軸に対して、直交する方向をy軸とする。また、垂直方向をz軸とする。このような記録ヘッド34Aが図2のように画像形成装置のキャリッジ33に搭載されると、x軸が副走査方向、y軸が主走査方向に対応する。
図示する例では、ノズル104は、複数あり、x軸方向に並べられる構成である。この例では、複数のノズル104によって、ノズル群4が構成される。具体的には、図示するように、ノズル104は、第1行目ノズル列4a及び第2行目ノズル列4bとなるように複数並べられ、ノズル群4が構成される。なお、第2行目4bは、図示するように、第1行目4aを構成するノズル104がない位置、すなわち、第1行目4aを構成する各ノズル104の間を補間する位置等となるように設置される。
例えば、各列のノズルピッチは150dpiとし、2列配置により300dpiとしている。
また、記録ヘッド34Aは、液滴が流れる流路を形成する流路板101(液滴基板)を有する。さらに、図示する構成は、流路板101の下面には、振動板102が接合される例である。一方で、この例では、流路板101の上面には、接着剤等で、ノズル板103が接合される。さらにまた、振動板102には、接着剤等によって、フレーム部材130が接合される。
流路板101、振動板102、ノズル板103及びフレーム部材130等によって、ノズル104から吐出される液滴となる液体が流れる流路又は液体が格納される液室等が、形成される。
また、形成される液室の壁面のうち、少なくとも一面には、ダンパ部材20が、用いられる。なお、ダンパ部材20は、フレーム部材130である壁面より剛性が低い。さらに、ダンパ部材20は、一層に限られず、二層以上であってもよい。他にも、ダンパ部材20は、振動板102と異なる材料であってもよい。例えば、ダンパ部材20は、ニッケル(Ni)金属等である。すなわち、ダンパ部材20は、ニッケル金属等の気体の透過性が低い材料が望ましい。また、ダンパ部材20は、樹脂膜等で形成されてもよい。
上述のヘッドの駆動方法については上記のように、(引き−押し打ち)に限るものではなく、駆動波形の与えた方によって引き打ちや押し打ちなどを行うこともできる。
<制御ブロック>
次に、この画像形成装置の制御部の概要について図6を参照して説明する。図6は同制御部のブロック説明図である。
画像形成装置の制御部200は、CPU(Central Processing Unit)201、ROM(Read−Only Memory)202及びRAM(Random Access Memory)203を有する。また、制御部200は、NVRAM(Non―Volatile RAM、不揮発性RAM)204及びASIC(Application Specific Integrated Circuit)205を有する。さらに、制御部200は、ホストI/F(interface)206、印刷制御部66、主走査制御部72、副走査制御部73、エンコーダ解析部216、ACバイアス供給装置212、及びI/O(Input/Output)213を有する。また、画像形成装置は、制御部200に接続される、キャリッジ33、主走査駆動部62、副走査駆動部64、副走査エンコーダ65、帯電ローラ56、操作パネル214、温度センサ215等をさらに有する。
CPU201は、画像形成装置全体を制御する。すなわち、CPU201は、制御部200が行う処理及びデータ加工を実現するための演算を行う演算装置である。また、CPU201は、図示するハードウェアを制御する制御装置である。
ROM202、RAM203及びNVRAM204は、記憶装置の例である。具体的には、ROM202は、CPU201が実行するプログラム及び固定データ等のデータを記憶する。またRAM203は、画像データ等のデータを記憶する。さらに、NVRAM204は、画像形成装置の電源が遮断されてもデータを保持できるため、NVRAM204には、画像形成装置の電源が遮断されても保持させるデータ等が記憶される。
ASIC205は、画像データに対する各種信号処理、並び替え等の画像処理及び画像形成装置全体を制御するための入出力信号の処理を行う電子回路である。
ホストI/F206は、ホスト側と、データを送受信するインタフェースである。
印刷制御部66は、ヘッド部34(4つの液滴吐出ヘッド34k,34c,34m,34y等を駆動させるデータを送信する。また、印刷制御部66は、駆動波形を生成し、送信する。
キャリッジ33は、ヘッド駆動部61及び液滴吐出ヘッド34等によって実現される。ヘッド駆動部61は、ヘッド移動手段であるキャリッジ33側に設けられる液滴吐出ヘッド34を駆動させるためのドライバIC(Integrated Circuit)等である。
主走査制御部72は、主走査駆動部(モータ)62を駆動させ、キャリッジ33を主走査方向へ移動させる。副走査制御部73は副走査駆動部(モータ)64を駆動させ、搬送ローラの回転により搬送ベルト51を連れ回し、記録媒体を副走査方向へ移動させる。ACバイアス供給装置212は、帯電ローラ56にACバイアスを供給する。
エンコーダ解析部216は、検知信号から移動方向を検知する方向検知部217と移動量を検知するカウンタ部218とを備えている。
そして、印刷制御部66は、主走査エンコーダ63が検出して、エンコーダ解析部216で解析した解析結果に基づいて、主走査駆動部62を駆動制御することでキャリッジ33の移動制御を行う。
主走査駆動部62は、印刷制御部66から制御信号が入力され、入力した制御信号に応じてキャリッジ33を主走査方向に移動させる。より具体的には、主走査駆動部62は、制御部66からの制御信号に応じて回転するモータであって、モータの回転を主走査方向への直線移動に変換する駆動プーリ38やタイミングベルト37(図2参照)等へ接続されている。
主走査エンコーダ63は、ヘッド部34の主走査方向の位置を所定間隔毎に示す位置信号を発生する。主走査エンコーダ63は、一例として、ヘッド部34が主走査方向に所定間隔移動する毎に、パルス波形の位置信号を出力する。主走査エンコーダ63がパルスを発生する間隔は、主走査エンコーダ63による主走査方向の位置検出の精度に相当する。
本実施形態においては、主走査エンコーダ63は、ヘッド部34が1200dpiに相当する間隔分移動する毎に、パルス波形を発生する。このような主走査エンコーダ63は、ヘッド部34が主走査方向に一定速度で移動することによって、一定周期のパルス波形の位置信号を出力する。
図7に、画像形成装置に搭載される主走査エンコーダの構成と、エンコーダセンサが示す位置情報を示す。主走査エンコーダ63は、図7に示すように、主走査方向に平行に固定して配置されたエンコーダスケール67と、キャリッジ33に搭載されたセンサ68とを含む。
エンコーダスケール67には、主走査方向に一定の間隔(例えば、1200dpiに相当する間隔)で、目盛り線(例えば光学的または磁気的なスリット)が形成されている。目盛り線の間隔が、主走査エンコーダ63の精度に相当する。
エンコーダセンサ68は、ヘッド部34が主走査方向に移動することによってエンコーダスケール67に形成された目盛り線を例えば光学的または磁気的に読み取り、目盛り線を読み取った位置でパルス(A相、B相)を発生する。なお、主走査エンコーダ63は、光学方式であっても、磁気方式であってもよいし、他の方式であってもよい。
エンコーダ解析部216のカウンタ部218は、エンコーダセンサ68からの同じ波形で位相の異なる2つのエンコーダ位置情報(A相、B相)をそれぞれ読み取り、エンコーダカウンタ波数をカウントして、位置信号を出力する。また、エンコーダ解析部216は、A相とB相のカウンタ値の差により、汚れを検出する異常状態判定部等をさらに備えていてもよい。
副走査駆動部64は、制御部66から制御信号を入力し、入力した制御信号に応じて用紙を副走査方向に移動させる。より具体的には、副走査駆動部64は、搬送ベルト51に保持された用紙Pが副走査方向に移動するように、搬送ローラ52を回転させるモータを含む。
副走査エンコーダ65は、用紙の副走査方向の位置を所定間隔毎に示す副走査位置信号を発生する。副走査エンコーダ65は、一例として、用紙Pが副走査方向に所定間隔移動する毎に、パルス波形の位置信号を出力する。副走査エンコーダ65がパルスを発生する間隔は、副走査エンコーダ65による副走査方向の位置検出の精度に相当する。本実施形態においては、副走査エンコーダ65は、一例として、用紙が1200dpiに相当する回転量分回転する毎に、パルス波形の副走査位置信号を出力する。
印刷制御部66は、CPU201から印刷対象となる画像データを入力し、入力した画像データに応じた波形パターンの記録信号を生成してヘッド駆動部61に供給する。制御部66は、主走査エンコーダ63および副走査エンコーダ65からの位置信号に応じて、主走査駆動部62および副走査駆動部64に制御信号を与えて、ヘッド部34の主走査方向の位置および用紙の副走査方向の位置を制御する。そして、制御部66は、記録信号をヘッド駆動部61に供給することにより、用紙の主走査方向および副走査方向のそれぞれの位置で、記録信号に応じたインク滴をヘッド部34のノズル104から吐出させる。
以上のような画像形成装置1によれば、外部のコンピュータ等から入力した画像データに応じた画像(対象物)を用紙上に形成することができる。
<制御手段の構成>
図8は、本発明の実施形態に係る印刷制御部(制御手段)66の構成を示す図である。印刷制御部66は、スキャン制御部70と、バッファ部71と、タイミング生成部74と、マスク発生部75と、信号生成部76と、信号出力部77と、波形記憶部78と、を有する。印刷制御部66には、主走査制御部72及び副走査制御部73等が接続されている。
スキャン制御部70は、ヘッド部34によるインク滴の吐出位置を制御する。すなわち、スキャン制御部70は、用紙に対するヘッド部34のノズル104の副走査方向の位置および主走査方向の位置を制御する。そして、本実施形態において、スキャン制御部70は、副走査方向の同一位置上でノズル104を主走査方向にN回(Nは2以上の整数)スキャンさせるように、バッファ部71、主走査制御部72、副走査制御部73、タイミング生成部74、マスク発生部75および信号生成部76を制御する。
バッファ部71は、外部から画像データ(対象物データ)を入力して一時的に記憶する。バッファ部71は、スキャン制御部70による制御に応じて、ヘッド部34のノズル列4の副走査方向の位置に対応するラインの画像データを、信号生成部(駆動波形生成部)76へと出力する。
主走査制御部72は、主走査エンコーダ63から出力された位置信号およびスキャン制御部70による制御に基づいて主走査駆動部62に制御信号を与えて、ヘッド部34の主走査方向の移動を制御する。主走査制御部72は、一例として、主走査エンコーダ63からの位置信号に応じて、ヘッド部34を主走査方向に予め定められた速度で移動させる。
副走査制御部73は、副走査エンコーダ65から出力された位置信号およびスキャン制御部70による制御に基づいて副走査駆動部64に制御信号を与えて、用紙の副走査方向の移動を制御する。副走査制御部73は、ヘッド部34の主走査方向への移動期間外において、用紙を副走査方向に移動させる。すなわち、主走査制御部72は、用紙が停止している状態で、ヘッド34を主走査方向に移動させる。
なお、副走査制御部73は、副走査エンコーダ65による副走査方向の位置の検出精度で用紙を移動させることができる。本実施形態においては、副走査エンコーダ65の精度は、1200dpiである。従って、副走査制御部73は、用紙を1200dpiの精度で副走査方向に移動させることができる。
タイミング生成部74と、マスク発生部75は第1の制御例における制御に用いられる。第2の制御例の方法で制御する場合は、タイミング生成部74と、マスク発生部75は利用されない。
タイミング生成部74は、主走査エンコーダ63から位置信号を取得し、取得した位置信号の位相をずらしたタイミング信号を生成する。タイミング生成部74は、一例として、ヘッド部34が主走査方向に一定速度で移動している最中に、主走査エンコーダ63のエンコーダセンサ68が、エンコーダスケール67に形成された目盛り線を検出することにより発生されるパルスの周期より短い時間分、位置信号を遅延させてタイミング信号を生成する。
本発明の第1の制御例に用いられる、タイミング生成部74は、副走査方向の同一位置上のN回のスキャンのそれぞれ毎に、異なる位相のタイミング信号を生成する。より具体的には、タイミング生成部74は、後述する制御を実現するように、設定された走査毎に、所定の繰り返し単位N毎に、位相をずらしたタイミング信号を生成する。
例えばN=4である場合、タイミング生成部74は、第1の位相調整部81−1と、第2の位相調整部81−2と、第3の位相調整部81−3と、第4の位相調整部81−4と、第5の位相調整部81−5と、第6の位相調整部81−6と、第7の位相調整部81−7と、切替手段82とを含んでいる。
第1の位相調整部81−1は、位置信号から位相ずれが無い第1のタイミング信号を出力する。第2の位相調整部81−2は、位置信号から1/4周期位相を早まらせた第2のタイミング信号を出力する。第3の位相調整部81−3は、位置信号から1/2周期位相を早まらせた第3のタイミング信号を出力する。第4の位相調整部81−4は、位置信号から3/4位相を早まらせた第4のタイミング信号を出力する。
第5の位相調整部81−5は、位置信号から1/4周期位相を遅らせた第5のタイミング信号を出力する。第6の位相調整部81−6は、位置信号から1/2周期位相を遅らせた第6のタイミング信号を出力する。第7の位相調整部81−7は、位置信号から3/4位相を遅らせた第7のタイミング信号を出力する。
切替手段82が接続する位相調整部81−1〜81−7を選択することにより、基準となる位置信号に対して、0、+0.25、+0.5、+0.75、−0.25、‐0.5、‐0.75の7段階の吐出開始タイミングを適宜設定することができる。
このような構成のタイミング生成部74は、位置信号のパルスの発生周期に対して所定周期ずつ位相をずらした第1から第7のタイミング信号を出力することができる。
マスク発生部75は、予め生成されたN種類のマスクパターンを記憶し、スキャン制御部70による制御に応じて、N回のスキャンのそれぞれ毎に対応するマスクパターンを選
択して出力する。より具体的には、マスク発生部75は、副走査方向の同一位置上のN回のスキャンのそれぞれ毎に、バッファ部71から出力される画像データから、タイミング信号の位相に対応する位置の画素の値を抽出することにより、主走査方向の画素を1/Nに間引くためのマスクパターンを発生する。
信号生成部76は、副走査方向の同一位置上のN回のスキャンのそれぞれ毎に、バッファ部71から出力される画像データから、マスク発生部75により発生されたマスクパターンにより特定される画素の値を抽出し、抽出した画素の値を表す記録画素データを生成する。すなわち、信号生成部76は、副走査方向の同一位置上のN回のスキャンのそれぞれ毎に、ノズル104の副走査方向の位置に対応するラインの画像データからタイミング信号の位相に対応する画素を抽出し、抽出した画素の値を表す記録画素データを生成する。
そして、信号生成部76は、生成した記録画素データを信号出力部77に与える。
信号出力部77は、副走査方向の同一位置上のN回のスキャンのそれぞれ毎に、タイミング生成部74から出力されたタイミング信号、および、信号生成部76により生成され
た記録画素データを入力する。そして、信号出力部77は、信号生成部76により生成された記録画素データに応じた値の記録信号を、タイミング信号のタイミングに同期させて出力する。
そして、印刷制御部66は、信号出力部77から出力された記録信号をヘッド駆動部61へと供給する。
一方、波形記憶部78と、信号生成部76内に設けられた波形選択部79は、第2の制御例で用いられる。
第2の制御例で、波形記憶部78は、吐出後の液滴の飛翔速度が異なる複数の駆動波形を格納する。格納される異なる複数の駆動波形は、開始信号のタイミングで液滴が吐出される際に記録媒体上の基準の着弾位置へ着弾させるための標準波形と、標準波形から液滴の飛翔速度を高速化する又は低速化する飛翔速度変化波形とを含む。
制御手段である波形選択部79は、開始信号に合わせて、走査毎、即ち、搬送手段により用紙を間欠搬送するごとに、複数の駆動波形から、特定の液滴の飛翔速度となる駆動波形を選択して記録画素データとして出力する。
そして、信号出力部77は、波形選択された記録画素データを、位置信号であるタイミング信号に同期させて出力する。
そして、印刷制御部66は、信号出力部77から出力された記録信号をヘッド駆動部61へと供給する。
<エンコーダの位置検出と液滴吐出の関係>
上記のように、エンコーダからの位置信号により、タイミングを計り、位置信号に合わせて、液滴吐出パルスを印加する。
図9に理想的な吐出位置を示す。図9に示すように、したがって、エンコーダ(エンコーダスケール67)にミスト/異物が付着しておらず、環境状況も理想的な吐出状態において良好な画質が確保できる。この状態では、エンコーダ(エンコーダセンサ68による目盛り読み取り)からの位置検出に合わせて、キャリッジ33に搭載されたヘッドのノズルから、液滴を吐出している。
図10に、エンコーダ(エンコーダスケール67)に異物が付着際の吐出位置を示す。図10に示すように、エンコーダに異物(ミスト、紙粉、ゴミ、手垢、etc)付着時のエンコーダの検知タイミングずれによる着弾位置がずれて、毎走査毎の吐出タイミングが同じ場所で同じ程度ばらつくことで、スジ・ムラがより強調されて視認されやすくなる。
<着弾位置と吐出速度>
図11に理想的な着弾位置に対応する理想的な液滴飛翔速度におけるドットパターンを示す。図11に示すように、キャリッジ33は、4色の液滴吐出ヘッド34k,34c,34m、34yを含むヘッド部34を、記録媒体に対して主走査方向に相対的に往復移動させている。
ここで、搬送手段(搬送ベルト51、搬送ローラ52)は、ヘッド部34が往路移動する際の記録媒体P上の液滴付与領域と復路移動する際の液滴付与領域とが互いに重畳するように停止している。そして、搬送手段は、ヘッド部34の液滴吐出ヘッド34k,34c,34m、34yが液滴を吐出していないときに、主走査方向と直交する副走査方向へ記録媒体Pを間欠的に搬送する。
<着弾位置ずれ>
図11に対して、速度変化による着弾位置ずれが発生した場合の例示を図12に示す。図12は、着弾位置ずれがなければ、図11のように配置するはずが、吐出滴が高速化して、着弾位置が2400dpi(半ピッチ)ずれた状態を例示している。
図12では、往路と復路のドットがかさなってしまい、ドット間に狙いではない白い隙間部が拡大して濃度が低下したり、ドットが形成された部分は2滴が重なって着弾してドット径が狙いから外れたり、ドットの色味が狙いから外れたりしている。
図12のように、吐出速度の変化等で、一様に着弾位置がずれ、双方向印字等の影響でずれに対してドットが重なってしまう場合、画質が大幅に低下する。
ここで、図11のように、液滴の速度変化の発生させる要因は、下記のような場合がある。
(1)ヘッドばらつきによるもの:
温度毎の速度変化量がヘッドによって異なる。そのため、常温で位置(タイミング)調整しても、高温/低温での吐出速度がヘッドによっては想定より高速化したり低速化したりする。
(2)検知ずれによるもの:
ヘッド内のインク温度を検知して、温度毎の駆動波形を選択して吐出速度を一定化させる制御が一般的なプリンタに搭載されている。しかし、温度検知センサを、ヘッド内に内蔵していないヘッド構成では、検知温度と実際のインク温度とが異なっている状態が発生する場合がある。特に、環境温度が変化している最中や、連続印字によるヘッド部品の発熱(アクチュエーターやドライバICからの発熱)でインク温度が変化している状態のときは、検知温度と実際のインク温度のずれ量が大きくなり、想定吐出速度からのずれ量が大きくなる。
(3)インクの製造ばらつきによるもの:
位置(タイミング)調整したときに使用したインクと、その後インクカートリッジ交換等で異なるロット(粘度)のインクが充填された状態とでは吐出速度が変化し、着弾位置がずれる。
このようなエンコーダへの異物付着、不吐出や曲がり、速度変化による着弾ずれが発生した場合、複数走査での描画時に同じ場所に同程度の異常が、重ね描きされることで、ずれや異常が視認されやすくなってしまう。
一例として、(2)温度の違いによる飛翔速度の違いについて説明する。図13(a)は、ヘッド部の温度が30℃未満の場合(実線)と30℃以上の場合(波線)におけるインク滴の飛翔状態を説明する図である。
図13はヘッド部34と搬送ベルト51を支えるプラテンとの距離(ヘッドープラテン間距離)が、1.4mm、キャリッジ速度が、1016mm/s、30℃未満におけるインク滴吐出速度が、7000m/s、30℃以上におけるインク滴吐出速度が、6300m/sである場合が示されている。そして、図13では、30℃におけるインク滴の飛翔状態が実線で示され、30℃以上におけるインク滴の飛翔状態が波線で示されている。
すなわち、同じキャリッジ速度では、30℃未満におけるインク滴の着弾位置と30℃以上におけるインク滴の着弾位置とは、20um位置ずれが発生している。
また、図13(b)は、キャリッジ33の主走査方向移動の双方向で、画像形成するいわゆる双方向印字(印写)の場合が示されている。双方向印字では、図13(a)と同じ印字条件であると、実線で示す30℃未満の着弾位置は、同じであるが、波線で示す30℃以上の着弾位置は、40um位置ずれする。
このように変化すると、図12のように、双方向印字において、着弾位置が重なってしまう。
そこで、本発明の一実施形態では、意図的にエンコーダが検出した位置から吐出位置をずらすことで、白スジを目立たなくする。下記、白スジが目立ちにくい、吐出パターンを説明する。
エンコーダに付着した異物によって吐出タイミングがずれて着弾ずれが発生するが、走査毎の基本の吐出タイミング補正値を変化させることにより、スジ(白抜け部)を拡散することができ、白スジが視認されにくくすることが可能となる。
<制御例1:タイミング調整例1>
エンコーダ検出位置に対する吐出タイミング補正例の一例を図14に示す。
タイミング調整において往路と復路の1走査目のエンコーダを検知してからの吐出タイミング補正値をaとa'と、往路と復路の2走査目の吐出タイミング補正値をbとb'、理想的なエンコーダ検知周期をTとした場合に、図14は、a=a'、b=b'、a<b、b−a>(T/2)を満たす関係の実施例となる。
本発明の構成においては、aとbの差が大きいほど、スジやムラの視認性が低下する効果が得られる。
<制御例1:タイミング調整例2>
エンコーダ検出位置に対する吐出タイミング補正例の一例を図15に示す。
往路と復路の1走査目のエンコーダを検知してからの吐出タイミング補正値をaとa'、往路と復路の2走査目の吐出タイミング補正値をbとb'、往路と復路の3走査目の吐出タイミング補正値をcとc'。
理想的なエンコーダ検知周期をTとした場合に、a=a'、b=b'、c=c'、a<c<b、b−a>(T/2)、(a+b)/2=cを満たす関係の実施例となる。
<第1の分散ドットパターン例>
制御例として、着弾位置を分散させた例を図16に示す。
ここでは、1200x1200dpi画像を、ラスタースキャン方式において画像全体を飛び飛びに走査・処理する、2Pass、1/4インターレースで描画するパターンを示す。
本発明の一実施形態では、インターレースごと(走査ごと)に駆動波形の吐出タイミングを変更して、能動的に走査毎の着弾位置をずらす(第1の制御例、図17)。
あるいは、インターレースごと(走査ごと)に駆動波形の形状を変更して、能動的に走査毎の着弾位置をずらす(第2の制御例、図18、図19)。
図16では、画像データ(対象物データ、描画データ)は着弾位置を基準位置に設定する図11のように1x8の1列直線、及び3列直線を描くような画像データが入力された際に、狙い通りの吐出速度が得られている時の描画パターンを示す。
例えば下記のようなずらし量に相当する駆動波形の吐出開始タイミング変動又は駆動波形の選択による飛翔速度の変動を走査ごとに行う。
1走査目の駆動波形の位置調整値:0
2走査目の駆動波形の位置調整値:+0.5pixel分
3走査目の駆動波形の位置調整値:0
4走査目の駆動波形の位置調整値:−0.5pixel分
上記の位置調整は、吐出タイミング制御によって実施してもよいし、波形制御によって実施してもよい。2種類の位置制御について下記、詳細説明する。
<第1の制御例>
図17に第1の制御例として、位置信号からタイミング信号を調整する例を示す。詳しくは、図17は、第1の制御例において、N=4で図16に示す制御を実行する場合の位置信号、タイミング信号、記録画素データおよびドット位置の関係を示す図である。
エンコーダが所定の位置を検出したことによる位置信号を受け取った後、吐出開始タイミング信号を調整することで、駆動波形を圧電素子121Aへ印加し始めるタイミングを早めたり、遅めたりする。
このように調整されたタイミング信号を用いることで、駆動波形の圧電素子への印加タイミングを調整し、ドットの着弾位置を変更することができる。
例えば、図16のような第1の分散例で着弾されるドットパターンの繰り返し単位は4走査とする。
このような第1の分散例にドットパターン位置を調整するため、図17に示す制御例1の方法では、タイミング生成部74で、駆動波形の吐出開始タイミングを下記のように設定する。
吐出開始タイミングを1走査目で位相変化なし、2走査目で1/2周期位相を早め、3走査目で位相変化なし、4走査目で1/2周期位相を遅くするように設定する。
ここで、記録媒体において、副走査方向に隣接して着弾したドットは、異なる位置検出信号を基準として、変化した異なる吐出開始タイミングに基づいて、所定の駆動波形が圧電素子へ印加されて液滴が吐出することで、形成される。
なお、上記、タイミングを制御する基準となる駆動波形開始信号は、エンコーダによって検出される位置検出信号を用いて説明した。ただし、駆動波形開始信号は、位置検出信号に限られず、例えば、キャリッジモータ駆動部(固定周期の信号発生装置)から出力される所定の信号であってもよい。
<第2の制御例>
図18に、着弾位置を駆動波形の形状により調整する例を示す。図18に示す駆動波形テーブルは、着弾位置を基準位置からずらすための選択に用いられる駆動波形の例を示す。
制御手段は、適用したい着弾位置に合わせて、予め波形記憶部78に格納された波形を選択して適用する。
例えば、キャリッジ位置検出信号により、検出される位置に着弾させたい場合の吐出の標準速度を、基準となる速度(±0)である標準波形Dとする。
例えば、基準の位置よりも、キャリッジ移動方向の上流側に移動させる場合は、高速化波形を使用する。高速化波形として、程度に応じて、+0.25用、+0.5用、+0.75用を準備し、予め保存しておく。
一方、基準の位置よりも、キャリッジ移動方向の下流側に移動させる場合は、高速化波形を使用する。低速化波形として、程度に応じて、‐0.25用、‐0.5用、‐0.75用を準備し、予め保存しておく。
ここで、図19に、高速化波形と低速化波形の一例を示す。駆動波形は、振幅が大きくなるほど、吐出される液滴の飛翔速度が高速化する。また、微駆動を除いた引き、打ち波形の傾きが急であるほど、液滴の飛翔速度が高速化する。
したがって、吐出される液滴の量を変化させずに、速度を速めるには、ノズル及び液室内の液体の変位量を変えないように、基準電位からの変位量(図19の塗りつぶし面積)を変化させずに、波形の傾き及び振幅を調整すればよい。
さらに、上述のように、温度により波形は変化するため、夫々の速さの波形について、温度に応じて夫々、記憶しておくとさらに好ましい。
上述のように温度が高いほど、高速化するので、駆動波形が発生させる液体速度を比較すると、低温用標準波形D'>常温用標準波形D>高温用標準波形D''の順に飛翔速度が速くなるように、駆動波形の振幅や、立ち下がり、立ち上がり波形の傾斜を設定しておく。
例えば、図16に示す第1の分散例のドットパターン位置を調整するため、制御例2の方法では、吐出後の飛翔速度を調整するように、波形選択部79は駆動波形を下記のように選択する。
1走査目で標準波形D、2走査目で高速化波形B、3走査目で標準波形D、4走査目で低速化波形F、を波形記憶部78から選択して設定する。
第1の制御例及び第2の制御例を用いて分散させるドットパターンの着弾位置は、図16に示すものに限られず、他の着弾位置へと制御してもよい。
[第1の分散例からの液滴変化]
図20に、図16に示す第1の分散例で+0.75pixelの着弾位置ずれが起きた場合の例を示す。
上述の図12の例では、吐出速度の変化による着弾ずれで発生し、吐出滴のずれ量が、位置調整時の吐出速度より0.75pixel相当の速度変化もしくは着弾位置ずれが発生した場合、3x8=24ドット全てが往路復路のドットが重なってしまっていた。そのため、24/24ドットが重なり、画質が大幅に低下してしまうおそれがあった。
しかし、本発明の一実施例として、図20に示すように、着弾位置を基準位置からずらすように、走査ごとに、吐出開始タイミングを変化させたり、駆動波形の強さを変化させて吐出速度を変化させたりすることで、4往路復路で重なるドット数を、4/24ドットに低減することができる。
確かに、着弾位置ずれが全く無い場合の図11のドットパターンが正常に吐出されると、画質は美しい。しかし、周囲の温度変化や粘度変化等によって、液滴の飛翔速度に速度変化が発生した場合、図12のように着弾位置ずれが発生した場合の画質の低下量は、低下してしまう。
これに対して、図20のように、走査ごとに着弾位置のずれ量を変化させた場合、着弾位置ずれが全く無い場合の図11のドットパターンに比べて画質は低下するが、速度変化による着弾位置ずれが発生した場合の画質の低下量は、図20の方が図12に比べて大幅に低減する。すなわち、図12に比べて、画質の低下量が1/6に抑えられる。
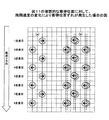
図21に、図16の分散例で−0.75pixelの着弾位置ずれが起きた場合の例を示す。図20では+0.75pixel分の吐出滴の速度変化が発生した場合の例を示したが、図21では−0.75pixel分の吐出滴の速度変化が発生した場合の例を示す。
図21でも、図20と同様に、24/24ドットが重なる図12と比較して、4往路復路で重なるドット数を、4/24ドットに低減することができるため、画質の低下量が1/6に抑えることができる。
第1の制御例及び第2の制御例を用いて分散させるドットパターンの着弾位置は、図16に示すものに限られず、他の着弾位置へと制御してもよい。
[第2の分散例]
図22に、制御例として、着弾位置を分散させた第2の例を示す。
図22では、1200x1200dpi画像を2Pass1/4インターレースで描画するパターンを示す。インターレースごと(走査ごと)に駆動波形の吐出タイミングを変化させて、又は駆動波形の選択による飛翔速度を変化させて、能動的に着弾位置をずらしている。
図22に示す第2の分散例では、図11のように1x8の1列直線及び3列直線を描くような画像データが入力された時に、狙い通りの吐出速度が得られて着弾位置ずれが発生していない時の描画パターンを示す。
例えば下記のようなずらし量に相当する駆動波形の吐出開始タイミング変動又は駆動波形の選択による飛翔速度の変動を走査ごとに行う。
1走査目の駆動波形の位置調整値:−0.75pixel相当
2走査目の駆動波形の位置調整値:+0.25pixel相当
3走査目の駆動波形の位置調整値:+0.25pixel相当
4走査目の駆動波形の位置調整値:−0.75pixel相当
5走査目の駆動波形の位置調整値:+0.25pixel相当
6走査目の駆動波形の位置調整値:+0.25pixel相当
7走査目の駆動波形の位置調整値:−0.75pixel相当
8走査目の駆動波形の位置調整値:+0.25pixel相当
なお、この第2の分散例で着弾されるドットパターンの繰り返し単位は8走査とする。
例えば、このような第2の分散例にドットパターン位置を調整するため、制御例1の方法では、タイミング生成部74で、駆動波形の吐出開始タイミングを下記のように設定する。
吐出開始タイミングを1走査目で3/4周期遅め、2走査目で1/4周期早め、3走査目で1/4周期早め、4走査目で3/4周期遅め、5走査目で1/4周期早め、6走査目で1/4周期早め、7走査目で3/4周期遅め、8走査目で1/4周期早めるように設定する。
一方、このようにドットパターン位置を調整するため、制御例2の方法では、吐出後の飛翔速度を調整するように、波形選択部79で、駆動波形を下記のように選択する。
1走査目で低速化波形G、2走査目で高速化波形C、3走査目で高速化波形C、4走査目で低速化波形G、5走査で高速化波形C、6走査目で高速化波形C、7走査目で低速化波形G、8走査目で高速化波形Cを波形記憶部78から選択する。
着弾位置ずれがない場合は、図11の方が画質はよいが、図22では速度変化による着弾位置ずれが発生した場合でも、画質の低下量を抑えられる。
[第2の分散例からの液滴変化]
図23に、図22に示す第2の分散例で+0.75pixelの着弾位置ずれが起きた場合の例を示す。
具体的には、図23は、図22に示す第2の分散例(吐出パターン)に対して、環境温度が高くなったことにより、+0.5pixel相当狙いより吐出滴の速度が高速化した場合のドットパターンを示す。
図22のように、走査ごとに着弾位置のずれ量を変化させた場合、着弾位置ずれが全く無い場合の図11のドットパターンに比べて画質は低下するが、速度変化による着弾位置ずれが発生した場合の画質の低下量は、図23の方が図12に比べて大幅に低減する。例えば、図12に比べて、画質の低下量が5/24に抑えられる。
図24に、図22に示す第2の分散例で−0.75pixelの着弾位置ずれが起きた場合の例を示す。
具体的には、図24は、図22に示す第2の分散例(吐出パターン)に対して、環境温度が低くなったことにより、―0.5pixel相当狙いより吐出滴の速度が低速化した場合のドットパターンを示す。
3x8=24ドットのうち、24/24ドットが重なる図12と比較して、4往路復路で重なるドット数を、5/24ドットに低減することができるため、画質の低下量を大幅に低減することができる。
[第3の分散例]
図25に、制御例として、着弾位置を分散させた第3の例を示す。
図25では、1200x1200dpi画像を、2Pass1/4インターレースで描画するパターンを示す。インターレースごと(走査ごと)に駆動波形の吐出タイミングを変化させて、又は駆動波形の選択による飛翔速度を変化させて、能動的に着弾位置をずらしている。
図25に示す第3の分散例は、画像データは図11のように1x8の1列直線、及び3列直線を描くような画像データが入力された時に、狙い通りの吐出速度が得られて着弾位置ずれが発生していない時の描画パターンを示している。
例えば下記のようなずらし量に相当する駆動波形の吐出タイミング変動又は駆動波形の選択による飛翔速度の変動を走査ごとに行う。
1走査目の駆動波形の位置調整値:+0.25pixel相当
2走査目の駆動波形の位置調整値:+0.75pixel相当
3走査目の駆動波形の位置調整値:−0.25pixel相当
4走査目の駆動波形の位置調整値:−0.75pixel相当
なお、この第3の分散例では着弾されるドットパターンの繰り返し単位は4走査とする。
例えば、このようにドットパターン位置を調整するため、制御例1の方法では、タイミング生成部74で、駆動波形の吐出開始タイミングを調整するために、下記のように設定する。
吐出開始タイミングを1走査目で1/4周期早め、2走査目で3/4周期早め、3走査目で1/4周期遅め、4走査目で3/4周期遅めように設定する。
一方、このようにドットパターン位置を調整するため、制御例2の方法では、吐出後の飛翔速度を調整するように、波形選択部79で、駆動波形を下記のように選択する。
1走査目で高速化波形C、2走査目で高速化波形A、3走査目で低速化波形E、4走査目で低速化波形Gを波形記憶部78から選択する。
着弾位置ずれがない場合は、図11の方が画質はよいが、図25に示す第3の分散例では速度変化による着弾位置ずれが発生した場合、画質の低下量を抑えられる。
[第4の分散例]
図26に、制御例として、着弾位置を分散させた第4の例を示す。
第4の分散例においても、1200x1200dpi画像を2Pass、1/4インターレースで描画するパターンを示す。インターレースごと(走査ごと)に駆動波形の吐出タイミングを変化させて、又は駆動波形の選択による飛翔速度を変化させて、能動的に着弾位置をずらしている。
図26に示す第3の分散例は、画像データは図11のように1x8の1列直線を描くような画像データが入力された時に、狙い通りの吐出速度が得られて着弾位置ずれが発生していない時の描画パターンを示している。
例えば、下記のようなずらし量に相当する駆動波形の吐出開始タイミング変動又は駆動波形の選択による飛翔速度の変動を走査ごとに行う。
1走査目の駆動波形の位置調整値:−0.25pixel相当
2走査目の駆動波形の位置調整値:−0.25pixel相当
3走査目の駆動波形の位置調整値:+0.75pixel相当
4走査目の駆動波形の位置調整値:+0.25pixel相当
5走査目の駆動波形の位置調整値:+0.25pixel相当
6走査目の駆動波形の位置調整値:−0.75pixel相当
7走査目の駆動波形の位置調整値:−0.25pixel相当
8走査目の駆動波形の位置調整値:−0.25pixel相当
なお、この分散例3では着弾されるドットパターンの繰り返し単位は8走査とする。
ここで、分散例3のようにドットパターン位置を調整するため、制御例1の方法では、タイミング生成部74で、駆動波形の吐出開始タイミングを下記のように設定する。
吐出開始タイミングを1走査目で1/4周期早め、2走査目で1/4周期早め、3走査目で3/4周期遅め、4走査目で1/4周期遅め、5走査目で1/4周期遅め、6走査目で3/4周期早め、7走査目週目で4/3周期早め、8走査目で1/4周期早めるように設定する。
一方、このようにドットパターン位置を調整するため、制御例2の方法では、吐出後の飛翔速度を調整するように、波形選択部79で、駆動波形を下記のように選択する。
1走査目で低速化波形E、2走査目で低速化波形E、3走査目で高速化波形A、4走査目で高速化波形C、5走査で高速化波形C、6走査目で低速化波形G、7走査目で低速化波形E、8走査目で低速化波形Eを波形記憶部78から選択する。
着弾位置ずれがない場合は、着弾位置を基準位置に設定する図11の方が画質はよいが、図26では速度変化による着弾位置ずれが発生した場合、画質の低下量を抑えられる。
上記の説明では、色を限定せずに説明してきたが、画像形成装置では、複数の色を含む描画データに対応する。その場合、各色の液体の特性を考慮して、色ごとに、吐出開始タイミング及び/又は吐出後の飛翔速度を調整すると好適である。
本発明を適用することにより、画質低下要因(エンコーダ部品への異物付着、不吐出や曲がり、温度変化/温度検知ずれ/粘度変化等による速度変化)が発生しても、スジやムラが視認されにくくすることができる。
また、本発明に係る実施形態は、画像処理装置等のコンピュータに画像形成を実行させるためのプログラムを実行させることによって実現されてもよい。
<システム>
例えば図27は、本発明の一実施形態に係る画像形成装置を有する画像形成システムの一例を示すブロック図である。図示するように、画像形成システム700は、画像形成装置の例であるインクジェットプリンタ500を有する。また、図示するように、インクジェットプリンタ500に対して、画像処理を行うPC400等の画像処理装置が接続される。なお、画像形成システム700は、複数の画像処理装置を有してもよい。
PC400は、外部I/F407を有する。同様に、インクジェットプリンタ500は、外部I/F506を有する。図示するように、画像形成システム700では、PC400及びインクジェットプリンタ500は、外部I/F407及び外部I/F506によって、所定のインタフェース又はネットワーク等を介して接続される。
図28は、本発明の一実施形態に係る画像処理装置のハードウェア構成例を示すブロック図である。例えば、本発明の一実施形態に係る画像処理装置は、図示するハードウェア構成等である。
PC400は、CPU401、ROM402、RAM403、入力装置404、モニタ405、記憶装置406及び外部I/F407を有する。図示するように、各ハードウェアは、バスラインで接続される。
CPU401は、PC400が行う処理及びデータ加工を実現するための演算を行う演算装置である。また、CPU401は、図示するハードウェアを制御する制御装置である。
ROM402及びRAM403は、記憶装置の例である。具体的には、ROM402は、CPU401が実行するプログラム及び固定データ等のデータを記憶する。またRAM403は、画像データ等のデータを記憶する。
入力装置404は、PC400にユーザの操作等を入力する装置である。例えば、入力装置404は、マウス又はキーボード等である。
モニタ405は、PC400がユーザに対して表示等の出力を行う出力装置の例である。例えば、モニタ405は、LCD(Liquid Crystal Display)又はCRT(Cathode Ray Tube)等である。
記憶装置406は、ハードディスク等である。すなわち、記憶装置406は、補助記憶装置等である。
外部I/F407は、インターネット等のネットワーク又はUSB(Universal Serial Bus)等によって、外部装置と通信を行うインタフェースである。
また、PC400は、光ディスク等の記憶媒体を読み取る記憶媒体読取装置等を有する。
記憶装置406には、プログラムが記憶される。このプログラムは、記憶媒体から読み取られて又はネットワークからダウンロードされて、記憶装置406にインストールされる。このようにインストールされたプログラムによって、PC400は、画像処理を行う。なお、このプログラムは、所定のOS(Operating System)上で動作するプログラムでもよい。また、このプログラムは、アプリケーションソフトの一部であってもよい。
なお、本発明に係る液滴吐出方法では、画像形成装置側で、画像処理の一部又は全部が行われてもよい。以下の説明では、インクジェットプリンタ500が、画像の描画又は文字のプリント命令を受けて、実際に画像形成するドットパターンを生成する機能を有しない例で説明する。すなわち、ホストとなるPC400で実行されるアプリケーションソフト等によって、プリント命令が生成される。
次に、PC400、すなわち、ホストが有するプリンタドライバに基づいて、画像処理が行われる。この画像処理が行われると、ドットパターンを示すデータ、すなわち、印刷画像データが生成される。続いて、印刷画像データがラスタライズされて、インクジェットプリンタ500に、印刷画像データが送信される。
具体的には、まず、PC400は、アプリケーションソフト又はOSによる画像又は文字の画像形成命令が描画データメモリ等に記憶される。なお、画像形成命令は、例えば、イメージ(絵)を画像形成する場合には、画像形成する線の位置、太さ又は形等を示す。また、例えば、文字を画像形成する場合には、文字の書体、大きさ又は位置等を示す。さらに、画像形成命令は、特定のプリント言語等によって記述される。
次に、描画データメモリ等に記憶される画像形成命令は、ラスタライズによって解釈される。具体的には、線を画像形成させる画像形成命令であると、画像形成命令は、指定された位置及び太さ等に応じたドットパターンに変換される。
また、文字を画像形成させる画像形成命令であると、まず、PC400等に記憶されるフォントアウトデータから、文字の輪郭データが呼び出される。続いて、画像形成命令は、輪郭データに基づいて、指定される位置及び大きさ等に応じたドットパターンに変換される。一方で、イメージを画像形成させる画像形成命令であると、画像形成命令は、画像を示すドットパターンに変換される。
これらのドットパターンに対して、画像処理が行われて、データがラスタデータメモリ等に記憶される。なお、PC400は、直交格子を基本記録位置として、ドットパターンデータにラスタライズする。また、画像処理は、例えば、色を調整するカラーマネジメント処理(CMM)、ガンマ補正、ディザ法若しくは誤差拡散法等の中間調処理、下地除去処理又はインク総量規制処理等である。そして、ラスタデータメモリに記憶されるドットパターンデータが、インタフェースを介して、インクジェットプリンタ500に送信される。
本発明に係る画像形成装置は、例えば、プリンタ、ファクシミリ又はコピーの単体機能を有する装置に適用できる。また、本発明に係る画像形成装置は、プリンタ、ファクシミリ及びコピー等の複数の機能を有する複合機等に適用できる。また、液滴は、インクに限られず、他の種類の記録液又は定着処理液等でもよい。すなわち、本発明に係る画像形成装置は、インク以外の種類の液滴を吐出する装置に適用されてもよい。
さらに記録媒体は、用紙等に限られない。記録媒体は、液滴が付着可能な材質であればよい。例えば、液体が付着可能な材質は、紙、糸、繊維、布帛、皮革、金属、プラスチック、ガラス、木材、セラミックス又はこれらの組み合わせ等の液滴が一時的でも付着可能であればよい。
以上、本発明の好ましい実施例について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形又は変更が可能である。