JP2020200744A - 把持腕付きバケット - Google Patents
把持腕付きバケット Download PDFInfo
- Publication number
- JP2020200744A JP2020200744A JP2019123250A JP2019123250A JP2020200744A JP 2020200744 A JP2020200744 A JP 2020200744A JP 2019123250 A JP2019123250 A JP 2019123250A JP 2019123250 A JP2019123250 A JP 2019123250A JP 2020200744 A JP2020200744 A JP 2020200744A
- Authority
- JP
- Japan
- Prior art keywords
- bucket
- angle
- degrees
- pivot
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























Landscapes
- Shovels (AREA)
Abstract
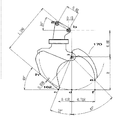
【解決手段】アタッチメントは作業機械のアーム先端に枢支される上部体120に対して、バケット161と前記バケット161に対向しその内部を枢動自在に取付けた把持腕170を含む下部体160が旋回ベアリング140を介して旋回自在に取付けられ、下部体の底面角の大きさをαとすると、αが40度≦α≦90度を満たすことを特徴としている。またアタッチメントは前記上部体120のボス角の大きさをβとすると、βは0度≦β≦45度を満たすことを特徴とする。
【選択図】図1
Description
近年、両者の機能を持つアタッチメントが用いられている。
しかしながら従来のアタッチメントはいわゆる木材用グラップルに比べて地面に置かれた木材を把持できる量が相当に少なく、さらに把持しにくいと言われている。
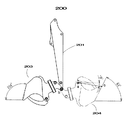
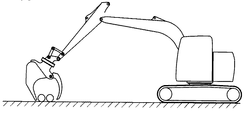
そこで従来のアタッチメントの1例をモデル化し、それを13トンクラスの作業機に取付けアーム200の長手方向に対して、その長尺方向がほぼ直交するように置かれた外径300mm(Φ300)木材250を把持する状況を図33に再現した。
図33を見て分かるように把持腕170が右のΦ300木材250の上方を通り過ぎ、左のΦ300木材250を把持できるかどうかという状況であった。
そこで運転手は図34のように作業機のアームを折り、バケットシリンダーを引いてアタッチメントを傾ける。(バケットシリンダーは図示せず。)すると2本とも把持できるようになる。
アーム200の長手方向に対して、その長尺方向がほぼ直交するように置かれた木材なら、このようにバケットシリンダーでアタッチメントの姿勢を変えてなんとか把持できるようになる訳だが、木材の方向が90度回転したような状態、つまりアーム200の長手方向と木材の長尺方向がほぼ平行となった状態では、アタッチメントを90度旋回させると、旋回ベアリングの旋回軸が鉛直線より傾いているので木材との接触が点当たりとなりうまくつかめない。
木材用グラップルは旋回ベアリングが水平な状態を保って木材がどの方向に向いていても把持できるように設計され、2つの把持腕が広範な軌道を動くので把持できる量も相当であるのでこのような問題は皆無であるのに対して、従来のアタッチメントは把持できる量と操作性がかなり劣っていることが確認された。
さらに従来のアタッチメントはバケットに満載された土砂を、例えばトラック荷台に積み込む際に土砂が溢れたりするなど土砂のハンドリングに大きな問題があるとも言われている。
そこで従来のアタッチメントを同じく13トンクラスの作業機に取付けて、4トンダンプに土砂を移載する状況を図35に再現した。
図35はバケットシリンダーを最伸長させ、最もアタッチメントを枢動させた状態である。把持腕枢動中心を頂点としバケット底面先端を結ぶ線分が水平線となす角を開口面角と呼ぶと、その角度が-39度と大きく土砂がこぼれやすくなっている。ここでは水平線から下向きの角度なのでマイナスをつけている。
上述したように従来のアタッチメントはつかむことや掘る機能は有するが、その機能レベルは木材用グラップル単体や掘削用バケット単体の機能レベルからすると相当に劣っていることが確認された。
把持する機能とバケット機能を有するアタッチメントは作業機が開発された黎明期から存在していたようだが、高いレベルで両立させる、つまり単機能のバケットや単機能のグラップルが行える作業に極限まで近づけて両立させるのは難しいことであったようだ。
ここでバケット機能とは掘削に関連する一連の作業が行えることで、掘削や掘削後の土砂の移載、積込み、掘削後の整地作業などである。
上記の課題が発生しているのは、そもそも掘削機能と把持機能を高度に両立させること自体にムリがあるのか、それとも設計領域に問題があるのかのどちらかであろう。
その結論を出すには設計領域を検討するしかないないのだが、設計手順がある訳でもなく、後述するのだがバケット機能と把持機能を両立させるのは二律背反的な性質があり、トライアンドエラーで設計や試作を重ね、課題の解決を図った。
死屍累々の図面や試作をのり越えて、上記命題の答にたどり着いた。
それを以下に開示する。
[基本設計 導入部]
課題を解決するための技術手段を説明するにあたっては、まず本発明の基本設計を説明しなければいけない。
なお公知技術においては冗長な説明を避け簡略な記載とした。
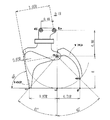
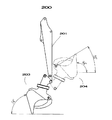
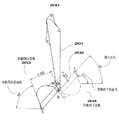
本発明の正面図を図1に、側面図を図2に示す。
以降は基本的に図1を使って説明する。
本発明は大きく3つの部分、その旋回軸が鉛直であるように配置された旋回ベアリング140、その上方の上部体120、その下方の下部体160から構成されている。
直接作業をする部分は、把持する機能とバケットを有する下部体160であるが、 上部体120も重要な貢献をする。
なお説明上重要な点はaからhとアルファベット順の記号を付け黒丸で示している。
最初に下部体160を説明する。
下部体160の主要部は、バケット161とバケット161に対向しその内部を枢動するように設けられ、その縁が概略三日月状の円弧の把持腕170である。
把持腕170はバケット161の外部に設けられた把持腕枢軸171を中心に枢動しバケット内部を通過する。
把持性能を決める最も重要なパラメータは把持腕170の長さ、つまり把持腕枢動中心aから把持腕170の最外端の縁までの距離、回転半径Rである。その軌跡は軌道172になる。
この回転半径Rを用いて、重要な位置であるバケット枢動中心bや寸法に関わる他の設計諸元を表現することができる。
図2に示すように把持腕170は高い剛性を持つように、2つの平行な側板173が連結部材174と連結部材175とで箱形状に形成されている。
連結部材175には2つの枢支ヒンジ177が取付けられている。
把持腕枢動中心aとバケット161の位置関係が極めて重要である。
まず把持腕170の回転半径Rを決めて、 地面300の鉛直上方に距離Rだけ離れた位置に把持腕枢動中心aを置く。
把持腕170は対向して置かれるバケット161内部を枢動するので、バケット161はその把持腕170の軌道172を邪魔してはいけない。つまり把持腕170の最外端とある程度のクリアランスを持ってバケット161は作られることになる。
クリアランスとは把持腕170がバケット内側を通過する際に最も最接近する時のすきまのことを言う。それは板厚や他の要因などにも左右されうるので、ここではそれら要因を除外するため、切刃162の外面163と軌道半径Rとの最小差をクリアランスの代わりに用い、回転半径Rの0.03倍に設定した。
把持腕170の軌道172に対してその接線が地面300となす角度がαとなるように接線を引く。角度αとは接線が地面と交わる点を頂点とし、その頂点から左に伸びる水平線を頂点を中心としてある角度だけ時計回りに回転させると接線と重なる角度のことである。その角を底面角と呼び、大きさをαで表し単位は度数法に従う。
引いた接線を前記クリアランス分として設定した0.03R分の距離だけ軌道の外側に平行移動させ地面300との交点を切刃先端位置cとする。
正面図に見える切刃162の外面163は0.03R分の距離だけ軌道の外側に平行移動させた接線と重なっており、バケットの底面の一部をなす。
ここでαは鈍角ではない角度とし、 角度上限を90度とする。 角度上限を90度とした理由は段落60に記載している。
底面角は従来のアタッチメントのそれは30度前後のようであり、その効果を得る最低角度を40度とした。
切刃162は最初に地中に入る部材で、掘削ツメが複数取付けられるが、説明のため省略している。
バケット161の底板は従来のバケットと同様に切刃162から連続して接続される。切刃162の外面163をそのまま延長したり、後述する実施例1のように途中で曲げてもよい。
底面角を小さくする場合は、曲げないと土砂を溜めるバケット後部が大きくなる。
バケット161は掘削する切刃162を持つ容器と言え、切刃162から底板、湾曲しているバケット後部の背板、バケット上部の天板へと至っている。
そしてそれらの板の両端に側板が接合され容器形状をなしている。
その側板は把持腕170の円弧状の縁176と対称的な円弧状の縁166が設けられ、両者の円弧状の縁が指を曲げた左右の手首をくっつけたような形を成し、 好ましく把持できるようにしている。
バケット容量は、側板の面積に側板間の距離であるバケット幅を掛けることで概略決定される。よってバケット容量を増やすには、側板の面積かバケット幅を増やすことになる。
後述する枢動機構がバケット上部、つまり天板上部に配置されるので、バケット天板の位置や大きさは制限される。底面角αが大きくなると側板の面積は減少する傾向になるので、バケット容量の決定にも注意を払う必要がある。
図2に示すように枢支された把持腕170を持つバケット161は2つの接続板164で下円板165と接続される。
2つの接続板164の間には把持腕170を枢動させる駆動源である油圧シリンダーや枢動機構が配置され、把持腕170を把持腕枢動中心aで枢動可能にしている。
油圧シリンダーの直線運動を回転運動に換える機構は、例えば特開2001-279702に記載の機構、または油圧ショベルのバケット枢動機構である4節リンクと同様な意願2015-28709に記載された機構など公知なものが存在する。
枢動角度を大きく取れる4節リンク機構が好ましい。
これら公知であるので図示しない。
またこれも公知であるが、油圧シリンダーストロークエンドになる前に把持腕170の枢動を機械的に止める手段を講じた方が好ましい。
把持可能な範囲は、固定側である切刃162で決定される範囲と枢動可能な把持腕170で決定される範囲の和と考える。
ここで把持腕枢動中心aからの鉛直線adを両者を分ける線とする。
点dとは点aから鉛直下方に距離Rだけ離れた点で、把持腕軌道172が水平線と接する点でもあり、さらに地面300とも接する点である。
固定側であるバケット切刃162で決定される把持可能な範囲はおよそ区間cdであり、角度で言うと角cad=θ1である。この範囲を固定側の把持範囲と呼ぶ。
把持腕170の可動範囲は枢動機構により決定される。ここではある枢動機構によってバケット161に対して把持腕170が最も遠ざかった状態を示す。
その状態において軌道172上の把持腕側板173の最内点をeとし、e点からの鉛直線が地面と交わる点をfとすると、枢動可能な把持腕170で決定される把持範囲は区間fdであり、 角度で言うと角ead=θ2となる。 この範囲を把持腕側の把持範囲と呼ぶ。
再度言うが把持腕側の把持範囲は枢動機構により決定される。
次に上部体120を説明する。
上部体120の機能はアタッチメントを油圧ショベルなどの作業機アーム先端に枢支させることである。つまりバケット枢軸を中心としてアタッチメントを枢動させることである。
上部体120は上円板121に2つの接続板122が垂設され、それぞれの接続板122にはバケット枢軸ボス123とバケットリンクピンボス124が設けられている。
よって上部体120は作業機アームを挟み込みながらバケット枢軸を中心としてアタッチメントを枢動させることができる。
把持腕枢動中心aとバケット枢動中心bの位置関係が重要である。
紙面上でバケット枢動中心bは把持腕枢動中心aから上方向に0.8R、左方向に0.1R離れた位置としている。
この間に旋回ベアリング、旋回機構、把持腕枢動機構を配置する。
バケット枢動中心bは把持腕枢動中心aより紙面で左に位置する方がバケットシリンダーで枢動する際にアームと干渉しにくくなり好ましい。
もちろん小型軽量化の要請や他の要求機能によって値が変わることは言うまでもない。
またバケット枢動中心bの位置はアタッチメントの揺動や掘削力においても重要な意味を持つ。
またバケット枢軸ボス123とバケットリンクピンボス124の中心距離いわゆるピン間距離は0.4Rとしている。
このピン間距離はバケット枢動中心bにおけるアタッチメントの枢動角と掘削力に関して重要な意味を持つ。
上述したピン間距離と同様に、バケット枢軸ボス123とバケットリンクピンボス124の位置関係も重要な意味を持つ。
バケット枢動中心bを頂点とし、バケットリンクピンボス中心gを結ぶ線分と水平線がなす角をボス角と呼び、その角度をβと表記する。
つまりボス角とはバケット枢動中心bを頂点とし、その頂点から左に伸びる水平線を頂点を中心としてある角度だけ時計回りに回転させると、バケット枢動中心bとバケットリンクピンボス中心gを結ぶ線分と重なる角度のことである。その角の大きさをβで表し単位は度数法に従う。
ただしボス角には正負を設ける。
バケット枢動中心bに対してバケットリンクピンボス中心gが上方にある時のボス角は正であると言い、バケットリンクピンボス中心gが同一水平線上にある時のボス角は0度であると言い、下方にある時はボス角はマイナスであると言う。
具体的な例で言うと、従来のアタッチメントのバケットリンクピンボス124はバケット枢動中心bを通る水平線より下に配置されるので、マイナスをつけて表現しβはおよそ-20度であった。
従来の木材用グラップルも同様な調査をするとβは同じくおよそ-20度であった。
実施形態で詳述するがボス角が大きくなるとバケット枢動中心bを中心としてバケット姿勢を反時計回りに回転させる効果がある。
よって課題解決にはボス角を従来より大きくする必要があり、最小のβを0度とする。 また大きな角度にすると、物理的にアームに干渉しやすくなるので最大45度とする。詳細は段落60に記す。
上部体120には特開2005-282308に開示されたような旋回機構がある。
よって旋回機構は図示しないが、ピニオンギアを取付けた油圧モーターで旋回ベアリング内輪を駆動するような構成となっている。
またこれも図示しないが、油圧装置やスイベルジョイントも有している。
旋回可能なアタッチメントにおいてはこのような構成は公知である。
旋回ベアリング140について説明する。
旋回ベアリング140は固定側である上部体120に対して、下部体160を旋回させる。
この旋回ベアリング140の主要な構成部品は、外輪、内歯がある内輪および転動体であり、転動体としてはボールを使用しているがローラーでも良い。ボールは軌道と点接触なので線接触であるローラーより荷重負担能力が劣るが安価で一般的である。
またこの種の点接触タイプのベアリングを用いずに、回転側から固定側への力の伝達が面接触である実願2011-006537に記載するようなすべり軸受を使うと、掘削力によるモーメント負担にはより好ましい。
掘削時の反力により意図せずバケットは旋回させられる。
よって固定側である上部体120に対して下部体160の旋回を防止するブレーキ手段やピンや歯車などのロック手段など旋回防止手段を設けた方が好ましい。
旋回防止のため、特開2005-282333にあるような回転停止手段を有するベアリングを用いてもよいし、特開2004-332832にあるような回転停止手段を用いてもよい。このような手段を講じると、掘削時に意図せずバケットが逃げるといった不具合が解消される。
[ 把持範囲の増加]
本発明は上述したように構成されているので、従来のアタッチメントの底面角およそ30度に対して、底面角を40度、60度、80度と大きくするにつれて切刃先端位置cが紙面上で左に動くので固定側の把持範囲が広がる。(図1参照)
把持腕側の把持範囲は枢動機構によって一定であるので、結局、把持範囲は広がる。
よって最終的に把持できる量を増やすことができる。
具体的に言えば、図33に示すように従来のアタッチメントはベアリング旋回軸が鉛直の時、Φ300木材が1本しか把持できないのに対して、底面角60度を有する実施形態は図22から図24に示すように3本把持できるようになる。
底面角を大きくするとバケット機能上で掘削力が強くなるという新たな効果が得られる。
ボス角を正の角度にしていくと、バケットシリンダーでアタッチメントを枢動させる時に従来の作業機のバケットと同じようなバケット姿勢に近づける効果があるので、トラックに土砂に積み込む際に土砂がこぼれにくくなる。
具体的に言えば、図35に示すように従来のアタッチメントを取付けた作業機械においてバケットシリンダーを最伸長させて4トンダンプに土砂の積込み作業する際の開口面角は-39度であるのに対して、図21に示すように底面角60度かつボス角30度である実施形態8を同じ作業機械に取付けて同じ姿勢を取った場合に、開口面角は-18度となり約20度改善されて土砂がこぼれにくくなる。
なお、以下に示す実施形態は例示に過ぎず、明示されていない種々な変形も発明に包含される。つまり本発明の範囲内でどんな実施形態も構成可能である。
これから開示する実施形態はボス角により3つのグループに分けている。それぞれのグループでは底面角を変えた3つの実施形態が繰り返し登場する。
最初に開示する実施形態のグループは、従来のアタッチメントと同様にボス角β=-20度のグループである。
実施形態1は底面角α=40度としている。(図3参照)
ボス角は従来のアタッチメントと同様にβ=-20度としている。バケットリンク接続用ボス中心gがバケット枢動中心bより下にあるのでマイナスと表現した。
底面角α=40度の場合、切刃162の外面163から延出した点hで板を曲げて背板から天板につなぎ、バケット161を形成している。
把持腕170は枢動機構により最大に開いた状態、鉛直線adから45度の角度位置にある状態を示す。以降の実施形態においても把持腕170は最大に開いた状態を示す。
固定側の把持範囲はおよそ区間cd=0.41Rであり、角度で言うと角cad=θ1=22度である。
バケット枢動中心bから切刃162までのモーメントで言う腕の長さは1.58Rである。
実施形態2は底面角α=60度としている。(図4参照)
固定側の把持範囲はおよそ区間cd=0.61Rであり、角度で言うと角cad=θ1=31度である。
バケット枢動中心bから切刃162までのモーメントで言う腕の長さは1.34Rである。
実施形態3は底面角α=80度としている。(図5参照)
固定側の把持範囲はおよそ区間cd=0.87Rであり、角度で言うと角cad=θ1=41度である。
バケットピボットピン接続ボス中心bから切刃までのモーメントで言う腕の長さは1.07Rである。
実施形態1から3でわかるように、底面角を大きくすれば固定側の把持範囲である区間cdが長くなることがわかる。
把持腕170による把持可能な範囲fdはその枢動機構によって決まり、その範囲を一定とすると、把持可能な範囲を広げるには固定側の把持範囲を広げるしかないことが分かる。
他方切刃先端cから軌道172までの距離は底面角が大きくなるにつれて長くなる。つまり小さいものが把持されにくくなる。
このように固定側の把持範囲を広げること、小形ものを把持することの両者には二律背反の関係が成り立っている。
固定側の把持範囲を広げる方が優先されようが、その程度はどこかで線引きすべきである。
また底面角を大きくすればバケット枢動中心bから切刃162までのモーメントで言う腕の長さは短くなる。
バケットシリンダーが掘削力に変換する割合は力の向きの影響を無視すると、ピン間距離0.4Rとバケット枢動中心bから切刃162までの腕の長さの比なので、底面角が大きくなるにつれて、その腕の長さが短くなるので掘削力が増大する。
その比を掘削力転換比と呼ぶと、従来の油圧ショベルバケットは0.4程度であり、実施形態1、2、3はそれぞれ0.25、0.30、0.37と従来のバケットの値に近づくことがわかる。
底面角を大きくするとバケット機能上で掘削力が強くなるという新たな効果が得られる。
ここで、従来のアタッチメントを基本設計に倣って再度表現してみる。
つまり把持腕170の大きさが異なると評価できないので、回転半径Rを基本設計と同一にした。
従来のアタッチメントは図36に示すように、切刃162の底面角α=30度であり、切刃162は紙面下方向に0.2Rほどオフセットされている。
切刃162が下方向にオフセットされているので点cが鉛直線adに近づき、固定側の把持範囲である区間cd1は小数点3桁を切り下げると0になった。
把持できる量が少ないのはこれが原因であろう。
また底面角α=30度であるので、バケット枢動中心bから切刃162までのモーメントで言う腕の長さは1.70Rと長くなり、掘削力転換比は0.24と小さくなり掘削力も弱いことが確認された。
そしてボス角βはおよそ-20度であった。
従来のアタッチメントは4tダンプに土砂を積み込む時に土砂がこぼれるという課題があった。以下で上記課題をこぼれ問題と言う。
従来の作業機としての油圧ショベルで使うバケットではそのような問題は起きないので、比較してみた。
以下で油圧ショベルで使うバケットを標準バケットと呼ぶ。
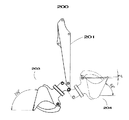
標準バケットを含むアーム部分をアーム縁201が鉛直になるように配置する。(図37参照)
標準バケットはバケットシリンダーによりバケット枢動中心bで枢動される。
ここでバケットシリンダー及びリンクは図が不明瞭になるので省略している。
バケットシリンダーを最も縮めた時のバケット姿勢を枢動開始姿勢203と呼び、その時のバケット切刃底面が水平線となす角度は69度であり、その角を枢動開始底面角と呼ぶ。
バケットシリンダーを最も伸ばした時のバケット姿勢を枢動終了姿勢204と呼び、その時のバケット開口面縁202が水平線となす角、開口面角はおよそ48度である。
そしてバケット切刃底面が水平線となす角度は111度であり、その角を枢動終了底面角と呼ぶ。
バケットシリンダーは標準バケットを約180度枢動させ、その際の枢動開始姿勢203と枢動終了姿勢204が分かった。
標準バケットがこのような動きをすれば、掘削や土砂の移載、整地作業などにおいて問題無いことであろう。
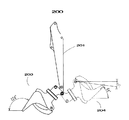
従来のアタッチメントにおいて同じ作業機を使い、アームの姿勢もアーム縁201を鉛直にして同様の調査を行った。(図38参照)
その際、把持腕170はバケット161の内部に収納した。
従来のアタッチメントにおける枢動開始姿勢203や枢動終了姿勢204は図のようであり、枢動開始底面角は94度で、枢動終了底面角は74度であった。
バケットシリンダーはアタッチメントを約168度枢動させ、従来の標準バケットの枢動角180度に対して10度程度しか違わないことが分かる。
しかし枢動終了姿勢204の開口面角は12度であり、標準バケットのその角度と比べて30度以上の違いがあり、これがこぼれ問題の大きな要因であることが判明した。
図37と図38の枢動終了姿勢204に注目すると、従来のアタッチメントのバケット容器は標準バケット容器に比べて、バケット枢動中心bを中心としてあたかも時計回りに回転している。
同様に実施形態1において、バケットシリンダーによる枢動状況の調査を行った。
(図6参照)
なお、後述する実施形態においてバケットシリンダーによる枢動状況を調査した際にも、同じ作業機械を使用しアームの姿勢も同様にアーム縁201を鉛直にし、同じ環境で比較した。その際それぞれの実施形態の把持腕170もバケット161の内部に収納して行った。
枢動開始姿勢203の枢動開始底面角は104度であり、 枢動終了姿勢の枢動終了底面角は64度であった。
枢動終了姿勢204においてバケット切刃先端cは把持腕枢動中心aより下方に位置したので開口面縁が水平線となす角度をマイナス表記で表し、開口面角は-9度であった。
実施形態2において同様の調査を行った。(図7参照)
枢動開始姿勢203の枢動開始底面角は124度、枢動終了姿勢204の枢動終了底面角は44度で、開口面角は-18度であった。
実施形態3において同様の調査を行った。(図8参照)
枢動開始姿勢203の枢動開始底面角は144度、枢動終了姿勢204の枢動終了底面角は24度で、開口面角は-27度であった。
実施形態1、2、3をそれぞれバケットシリンダーで枢動させると開口面角は減少していき、こぼれ問題はむしろ悪化することがわかった。
底面角を大きくすると把持性能は向上する一方で、底面角を増加させた角度分だけ枢動終了姿勢204の開口面角は減少した。
また枢動開始姿勢203も図36の標準バケット姿勢と比べると時計回りにかなりの角度回転している。
掘削時にバケットが地面に突入する姿勢、切刃162の地面突入角度を適切にする必要があるが、それはバケットシリンダーで調節できるものの、底面角が大きいとあまりにバケット姿勢が違い過ぎて、運転手が作業に違和感を感じるので好ましくない。
[ グループ2 実施形態4]
実施形態1の下部体や旋回ベアリングは変更しないで、上部体のボス角βのみ0度、つまり水平に変更し、実施形態4とする。(図9参照)
実施形態4においても同様にアームに取付けて枢動させた。(図10参照)
枢動開始姿勢203の枢動開始底面角は84度、枢動終了姿勢204の枢動終了底面角は84度で、開口面角は11度であった。
実施形態2の下部体や旋回ベアリングは変更しないで、上部体のボス角βのみ0度に変更し、実施形態5とする。(図11参照)
実施形態5においても同様にアームに取付けて枢動させた。(図12参照)
枢動開始姿勢203の枢動開始底面角は104度、枢動終了姿勢204の枢動終了底面角は64度で、開口面角は2度であった。
実施形態3の下部体や旋回ベアリングは変更しないで、上部体のボス角βのみ0度に変更し、実施形態6とする。(図13参照)
実施形態6においても同様にアームに取付けて枢動させた。(図14参照)
枢動開始姿勢203の底面角は124度、枢動終了姿勢204の底面角は44度で、開口面角は-7度であった。
実施形態4、5、6をバケットシリンダーで枢動させるとそれぞれ実施形態1、2、3より開口面角は20度増えて、土砂はこぼれにくくなった。
[ グループ3 実施形態7]
実施形態4の下部体や旋回ベアリングは変更しないで、上部体のボス角βのみ30度に変更し、実施形態7とする。(図15参照)
実施形態7を同様にアームに取付けて枢動調査を行った。(図16参照)
実施形態7において枢動開始姿勢203の底面角は54度、枢動終了姿勢の枢動終了底面角は114度で、開口面角は41度であった。
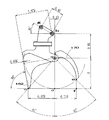
実施形態5の下部体や旋回ベアリングは変更しないで、上部体のボス角βのみ30度に変更し、実施形態8とする。(図17参照)
実施形態8において同様の調査を行った。(図18参照)
実施形態8において枢動開始姿勢203の枢動開始底面角は74度、枢動終了姿勢204の底面角は94度で、開口面角は32度であった。
実施形態6の下部体や旋回ベアリングは変更しないで、上部体のボス角βのみ30度に変更し、実施形態9とする。(図19参照)
実施形態9において同様の調査を行った。(図20参照)
実施形態9において枢動開始姿勢203の枢動開始底面角は94度、枢動終了姿勢204の底面角は74度で、開口面角は23度であった。
実施形態7、8、9を枢動させるとそれぞれ実施形態4、5、6より開口面角度は30度増え更にこぼれにくくなった。
実施形態4から9までの枢動結果より、ボス角を増加させると、その増加分だけ開口面角は増え、枢動開始底面角は減少し、枢動終了底面角は増加することがわかった。
つまりボス角を増加させると、バケット枢軸bを中心にしてアタッチメントを反時計回りに回転させる効果があることがわかった。
標準バケットの枢動時の姿勢を規準に考えると、バケットシリンダーを最も縮めた時、つまり枢動開始姿勢203の枢動開始底面角は70度もあれば問題は無いと考えられ、それからすると実施形態7ではもの足りず、実施形態8は問題無く、実施形態9は角度が大き過ぎる。
バケットシリンダーを最も伸ばした時、つまり枢動終了姿勢204の枢動終了底面角や開口面角はできる限り標準バケットのそれに近い方が好ましい。
その観点からすると実施形態7は標準バケットの状態に最も近く実施形態8から実施形態9になるにつれて標準バケットの状態から遠ざかって行く。
しかし実施形態9においても従来のアタッチメントに比べて土砂がこぼれにくくなっている。
底面角を増加させると把持範囲は広がるが、バケットシリンダーでの枢動時のバケット姿勢が標準バケットの枢動時の姿勢からずれて行く。
それを修正するのがボス角であることがわかった。
実施形態8を使って4トンダンプに土砂を積み込む状況を確認してみる。(図21参照)
第5段落で、従来のアタッチメントの土砂の積込み状況を記載したが、それと全く同じ環境で比較した。つまり同じ作業機を使い、ブームやアームの折れ角、バケットシリンダーも最伸長させ、全く同じ条件としている。
開口面角は-18度となり、従来のアタッチメントのそれは-39度であったのでおよそ20度改善されており、土砂はこぼれにくくなった。
ボス角を大きくするとバケット枢動時のバケット姿勢を好ましい方向に向かわせ、2番目の課題の解決に貢献することがわかった。
他方実際の把持作業において、ボス角が作業にどのような影響を与えるか調査した。
把持作業においてはアタッチメントの旋回ベアリングを水平の状態で使うのが基本であるので、 平地で旋回ベアリングを水平を保って把持作業できる範囲を調べることでボス角の影響を確認した。
底面角α=60度は共通でボス角β=-20度、0度、30度と変えた、3つの実施形態2、5、8を用いて調査した。
木材用グラップルや従来のアタッチメントと同じボス角β=-20度を持つ実施形態2を使ってΦ300木材を把持作業する様子を図22に示す。
アタッチメントの位置はクローラ先端からバケット枢軸中心bまでの距離で表現し、それを水平移動距離と呼ぶ。
油圧ショベルのアームを最も伸ばしても、またクローラに当たる直前までアームを折っても把持作業ができ、それぞれ水平移動距離は5.26Rと1.03Rであった。
その際Φ300木材を3本把持できるのがわかる。
実施形態2は油圧ショベルのブームとアームの能力を余すことなく水平移動でき、把持作業ができることがわかった。
実施形態5を使ってΦ300木材を把持作業する様子を図23に示す。
実施形態2と同様に、油圧ショベルのブームとアームの能力を余すこと無く実施形態5を最大限に水平移動できて把持作業が行えることがわかった。
つまりボス角β=-20からβ=0度に変えても作業範囲は同じであった
実施形態8を使ってΦ300木材を把持作業する様子を図24に示す。
油圧ショベルのアームを最も伸ばした位置は同じであるが、アームを折って最も近く作業できる位置は1.38Rと少し遠くなった。
ボスβ=30度と大きくすると、バケットリンクピンボス124がバケットシリンダー方向に近づきバケットシリンダーの縮み代が無くなるわけである。
このようにアームを折って作業機に近い位置で把持作業を行う場合、その位置がやや遠くなることがわかった。
アタッチメントに必要なバケット機能と把持機能に対して、設計パラメータである底面角αとボス角βが与える影響を表にまとめた。(図39参照)ただしこの表には今まで言及しなかった要求機能も記載している。
また要求機能に対してパラメータ欄に記載があるものは本明細書で言及したパラメータであり、記載が無いものは本明細書でパラメータとしなかったものである。
底面角αが大きくなるとパラメータの数値が大きくなる、または要求機能が向上するものは右上向き矢印で表現し、反対に悪くなるものは右下向き矢印で示し、影響が無いものは水平の矢印で示した。ボス角βも同様である。
矢印の記載が無い空欄はその設計パラメータが影響を与えないので本明細書で特に言及しなかったことを示す。
(底面角αの影響:バケット領域)
底面角αが大きくなると、掘削力転換比は大きくなり掘削力は強くなるが、バケット容積は減少する傾向が大きくなる。
「掘削性、整地性、土砂運搬性などに影響を与えるバケット姿勢は従来の標準バケットに近いか」という要求機能は、枢動開始底面角、枢動終了底面角、開口面角の3つのパラメータで評価した。
底面角αが大きくなると枢動開始底面角は増加し、枢動終了底面角及び開口面角は減少する。この傾向は従来の標準バケットから外れる方向である。
枢動終了底面角が減少すると掘削が終了しないおそれが高くなり、開口面角は減少するとバケットに掬った土砂がこぼれ易くなる。
(底面角αの影響:把持領域)
底面角αが大きくなると、パラメータ固定側の把持範囲が広がり大形の把持や大量の把持が可能になるが、小形の把持がしにくくなる。
実施形態では底面角α=80度まで図示したが、それより底面角を大きくすると、さらに把持範囲や掘削力は増加するが、バケットシリンダー枢動時の問題がさらに大きくなることや切刃先端cが軌道から離れ小形物の把持が困難になることから底面角を制限するのが好ましく最大でα=90度とした。
(ボス角βの影響:バケット領域)
ボス角βを大きくすると枢動開始底面角は小さくなり、枢動終了底面角や開口面角は大きくなる。つまり標準バケットの姿勢に近づく。よって土砂のこぼれ問題は改善される方向に向かう。
(ボス角βの影響:把持領域)
しかしその一方ボス角を大きくすると把持作業時において作業機に近い位置での作業が、ボス角が小さい場合に比べて遠ざかる傾向がある。
またボス角を大きくするとバケットシリンダーでの枢動時にアームと干渉し易くなるので、ボス角上限としてβ=45度とする。
ピン間距離を短くすればボス角は大きくすることができるが、枢動角度は大きくなり、枢動開始底面角や枢動終了底面角が大きくなる。枢動終了底面角が大きくなると、バケットシリンダー最伸長させた時、装置がアームと干渉する現象が起きることがあるので、その場合装置の設計変更かまたはバケットシリンダーを最伸長させないことが必要となる。
またピン間距離を短くすれば、掘削力が小さくなるという問題も出てくる。
まとめると、底面角αを大きくすると把持範囲は広がり、最初の課題を解決する。と同時に掘削力も増加する。
さらにその際にはボス角度βも大きくするとこぼれ問題も解決する方向に向かう。
またここでは詳しく言及しないが、統計的な言い回しをするといくつかの要求機能に対して、他の設計パラメータも含め交互作用や交絡が見られるようで、それらが設計を難しくしている。
しかし課題解決に対しては、底面角とボス角の主効果が大きいようで寄与率は高いようである。
基本設計において、グラップルアームの回転半径Rと把持腕中心aと底面角を与えたら、クリアランスはあるにしても切刃先端位置cは一義的に決定された。
これまで把持腕中心aと切刃先端位置cの関係が、掘削性能や把持性能に対して極めて重要であることがわかった。
代表的な実施形態8においてこの関係に影響を及ぼすと思われるいくつかの寸法パラメータをオフセットさせて、実際にどんな影響を与えるか調べた。
オフセット量を多くすると、最初に決めた把持腕中心aと切刃先端位置cの関係が意味を失うので0.1Rとした。
実施形態10 は切刃162を下方向に0.1Rほど離れた位置に平行移動させた。
(図25参照)
区間cd1は0.55Rとオフセットしない実施形態8の値0.61Rに比べて0.06R小さくなった。
これは地面直上において把持可能な空間が小さくなることを意味する。
さらに軌道172が切刃先端cより上方にくるので小さいものが把持しにくくなる。
実施形態10をアームに取付け、枢動させた。(図26参照)
枢動終了姿勢204の開口面角は37度と実施形態8に比べ5度大きくなり、土砂がこぼれにくくなった。
実施形態11 は切刃162を上方向に0.1Rほど離れた位置に平行移動させた。
(図27参照)
区間cd1は0.67Rとオフセットしてない実施形態8の値0.61Rに比べて0.06R大きくなった。
これは地面直上において把持可能な空間が大きくなることを意味する。
しかし切刃先端cを地面につけて把持作業をすると、軌道172は地面下を通るので把持腕170は土砂まですくってしまう。切刃先端cを地面から離せばそのようなことは解消されるが慣れが必要になる。
実施形態11をアームに取付け、枢動させた。(図28参照)
枢動終了姿勢204の開口面角は27度と実施形態8に比べて5度小さくなり、土砂がこぼれやすくなった。
実施形態12 は把持腕中心aを上方向に0.1Rほど離れた位置に平行移動させた。
(図29参照)
区間cd1は0.61Rとオフセットしない実施形態8の値0.61Rと変わらない。
しかし軌道172が切刃先端cより上方にくるので、小さいものが把持しにくくなる。
実施形態12をアームに取付け、枢動させた。(図30参照)
枢動終了姿勢204の開口面角は37度と実施形態8に比べて5度大きくなり、土砂がこぼれにくくなった。
実施形態13 は把持腕中心aを右方向に0.1Rほど平行移動させバケット枢動中心bから0.2R離した。(図31参照)
区間cdは当たり前であるがオフセットしない実施形態8の値0.6Rより0.1R大きく0.71Rとなった。
しかし軌道172が切刃先端cから離れることになるので、 小さいものが把持しにくくなる。
実施形態13をアームに取付け、揺動させた。(図32参照)
枢動終了姿勢204の開口面角は28度と実施形態8に比べて4度小さくなり、土砂がこぼれやすくなった。
枢動終了姿勢204において、把持腕170がアーム縁201と干渉する。
回避するためには把持腕170をバケット161内部に枢動させるか、上部体のボス位置変更など他の設計変更を行う必要がある。
実施形態8について、4つの設計寸法パラメータをそれぞれオフセットさせ、把持腕中心aと切刃先端位置cの関係が、把持範囲や開口面角などに対してどんな影響を与えるか調べた。
その結果を概して言うと、
角度cadが大きくなる、つまり区間cdが広がるようなオフセットをすると開口面角は小さくなる。
換言すると地面直上のグラップル空間が広くなるようなオフセットをするとこぼれ問題は悪化し、小形物の把持が困難になる。
角度cadが小さくなる、つまり区間cdが狭くなるようなオフセットをすると開口面角は大きくなる。
換言すると地面直上のグラップル空間が狭くなるようなオフセットをするとこぼれ問題は改善され、 小形物の把持が容易になる。
またオフセットをしても枢動開始底面角や枢動終了底面角には影響を与えないことがわかる。よって場合によってオフセットの使い道がある。
まとめると基本設計から寸法をオフセットさせると、把持範囲や把持可能な最小物そして開口面角に影響を与え、それらは二律背反性を有することがわかった。
この二律背反性が設計者を悩ませる元凶であるが、オフセットが必要であれば、どの特性を重視してどの程度オフセットするか決定しなければいけない。
しかし基本はあくまでも把持腕の大きさである回転半径Rと底面角で決まる位置関係であって、オフセットは付録である。
123 バケット枢軸ボス
124 バケットリンクピンボス
140 旋回ベアリング
160 下部体
161 バケット
162 切刃
170 把持腕
172 軌道
200 アーム
201 アームの縁
203 枢動開始姿勢
204 枢動終了姿勢
300 地面
a 把持腕枢動中心
b バケット枢動中心
c 切刃先端位置
d 把持腕枢動中心から鉛直下方向に距離R離れた点
e 把持腕170が枢動機構によりバケット161から最も遠ざかった位置において軌道172上にある把持腕170の最内点
f 最内点eを点dが通る水平線に鉛直に投影した点
g バケットリンクピンボス中心
α 底面角の大きさ
β ボス角の大きさ
Claims (2)
- 作業機械のアーム先端に枢支される上部体に対して、
バケットと前記バケットに対向しその内部を枢動自在に取付けた把持腕を含む下部体が旋回ベアリングを介して旋回自在に取付けたアタッチメントにおいて、
下部体の底面角の大きさをαとすると、αが40度≦α≦90度を満たすことを特徴とするアタッチメント。 - 請求項1記載のアタッチメントにおいて、前記上部体のボス角の大きさをβとすると、βが0度≦β≦45度を満たすことを特徴とするアタッチメント。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019123250A JP2020200744A (ja) | 2019-06-07 | 2019-06-07 | 把持腕付きバケット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019123250A JP2020200744A (ja) | 2019-06-07 | 2019-06-07 | 把持腕付きバケット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020200744A true JP2020200744A (ja) | 2020-12-17 |
Family
ID=73743808
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019123250A Pending JP2020200744A (ja) | 2019-06-07 | 2019-06-07 | 把持腕付きバケット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020200744A (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0635523U (ja) * | 1992-10-16 | 1994-05-13 | オカダアイヨン株式会社 | 解体装置 |
| JPH09217876A (ja) * | 1996-02-09 | 1997-08-19 | Muroto Tekkosho:Kk | 油圧回転継手及び油圧旋回装置 |
| JPH1136355A (ja) * | 1997-07-17 | 1999-02-09 | Yamakawa Eng Kk | グラップルバケット装置 |
| JP2004238874A (ja) * | 2003-02-05 | 2004-08-26 | Hiroshi Hayashi | パワーショベル又はクレーン装着用の旋回型把持装置 |
| JP2012172331A (ja) * | 2011-02-18 | 2012-09-10 | Muroto Tekkosho:Kk | グラップル付バケット装置 |
| JP2012170418A (ja) * | 2011-02-23 | 2012-09-10 | Iwafuji Industrial Co Ltd | グラップル装置 |
| JP2014020011A (ja) * | 2012-07-12 | 2014-02-03 | Hitachi Constr Mach Co Ltd | 建設機械の作業装置 |
-
2019
- 2019-06-07 JP JP2019123250A patent/JP2020200744A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0635523U (ja) * | 1992-10-16 | 1994-05-13 | オカダアイヨン株式会社 | 解体装置 |
| JPH09217876A (ja) * | 1996-02-09 | 1997-08-19 | Muroto Tekkosho:Kk | 油圧回転継手及び油圧旋回装置 |
| JPH1136355A (ja) * | 1997-07-17 | 1999-02-09 | Yamakawa Eng Kk | グラップルバケット装置 |
| JP2004238874A (ja) * | 2003-02-05 | 2004-08-26 | Hiroshi Hayashi | パワーショベル又はクレーン装着用の旋回型把持装置 |
| JP2012172331A (ja) * | 2011-02-18 | 2012-09-10 | Muroto Tekkosho:Kk | グラップル付バケット装置 |
| JP2012170418A (ja) * | 2011-02-23 | 2012-09-10 | Iwafuji Industrial Co Ltd | グラップル装置 |
| JP2014020011A (ja) * | 2012-07-12 | 2014-02-03 | Hitachi Constr Mach Co Ltd | 建設機械の作業装置 |
Non-Patent Citations (3)
| Title |
|---|
| イワフジ工業株式会社, GSグラップルシリーズ, JPN6023035307, May 1997 (1997-05-01), JP, pages 1 - 4, ISSN: 0005280015 * |
| 松本システムエンジニアリング株式会社, ハイブリッドアタッチメント ザウルスロボ MSE−ZRシリーズ, JPN6023035306, April 2000 (2000-04-01), JP, pages 1 - 4, ISSN: 0005280014 * |
| 株式会社室戸鉄工所, ハンドバケット−油圧ショベル用−, JPN6023035308, November 2011 (2011-11-01), JP, pages 1 - 2, ISSN: 0005280016 * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4314368B2 (ja) | 積込み装置 | |
| JP5048143B2 (ja) | モータグレーダ | |
| US11242667B2 (en) | Work vehicle including loader work device | |
| EP4116503B1 (en) | Backhoe loader capable of achieving efficient digging | |
| US5822892A (en) | Working vehicle | |
| JP2020200744A (ja) | 把持腕付きバケット | |
| US8770908B2 (en) | Tilt cylinder support structure | |
| US6019569A (en) | Excavation machine | |
| JP5593450B2 (ja) | 旋回可能な屈折アームが設置されたトラクター | |
| CN214423454U (zh) | 一种软基换填挖斗 | |
| JP2008063880A (ja) | 建設機械 | |
| JPH1060938A (ja) | アーム駆動装置 | |
| JPS6261738B2 (ja) | ||
| JP4382778B2 (ja) | 超小旋回作業機 | |
| JP2000291043A (ja) | パワーショベル | |
| JP4671826B2 (ja) | バックホー | |
| JPS6042123Y2 (ja) | 油圧式掘削機 | |
| JPS6237182B2 (ja) | ||
| JPS6027165Y2 (ja) | 油圧式掘削機 | |
| JPS6237181B2 (ja) | ||
| JP3930892B2 (ja) | 超小旋回作業機 | |
| JP4569381B2 (ja) | 油圧ショベルの配管構造 | |
| JP2022158820A (ja) | 建設機械、駆動システム及び駆動装置 | |
| JP2008002113A (ja) | 建設機械 | |
| JP3016121B2 (ja) | 車幅内旋回可能な建設機械のブーム構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20190607 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20220520 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220603 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230905 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240312 |