JP3906080B2 - 自動変速機 - Google Patents
自動変速機 Download PDFInfo
- Publication number
- JP3906080B2 JP3906080B2 JP2001578840A JP2001578840A JP3906080B2 JP 3906080 B2 JP3906080 B2 JP 3906080B2 JP 2001578840 A JP2001578840 A JP 2001578840A JP 2001578840 A JP2001578840 A JP 2001578840A JP 3906080 B2 JP3906080 B2 JP 3906080B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- assist
- clutch
- shaft
- counter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/087—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears
- F16H3/091—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears including a single countershaft
- F16H3/0915—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears including a single countershaft with coaxial input and output shafts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/12—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts with means for synchronisation not incorporated in the clutches
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/0403—Synchronisation before shifting
- F16H2061/0407—Synchronisation before shifting by control of clutch in parallel torque path
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19242—Combined gear and clutch
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19251—Control mechanism
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19251—Control mechanism
- Y10T74/19256—Automatic
- Y10T74/1926—Speed responsive
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19284—Meshing assisters
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Transmission Device (AREA)
- Gear-Shifting Mechanisms (AREA)
- Structure Of Transmissions (AREA)
Description
【0001】
本発明は自動変速機に関する。
【背景技術】
【0002】
変速装置として従来の手動変速機の機構、すなわち、噛み合い歯車式変速機を用い、エンジンと変速機とを締結及び解放するクラッチと、各ギヤと出力軸とを締結及び解放するクラッチを動かすアクチュエータを設け、該クラッチの締結、解放を実施するために該アクチュエータへの油圧を制御して、自動変速を実行する自動変速機が知られている。
このように構成される従来の自動変速機にあっては、噛み合いクラッチがいずれのギヤにも締結されていない、いわゆる中立の状態がある。
【0003】
このような中立の状態は、1速から2速へ、2速から3速へ、3速から4速へ、4速から5速へ変速する場合において噛み合いクラッチがいずれのギヤにも締結されていない状態で、車両は加速している状態であるにも拘わらず変速時の噛み合いクラッチがいずれのギヤにも噛み合っていないため、加速の動力が出力軸に伝達されず、運転者に減速したような一種のショック感を与えることになり運転感覚が悪いという問題がある。
本発明の目的は、加速時におけるクラッチの締結・解放の際のショック感を和らげることのできる自動変速機を提供することにある。
【発明の開示】
【0004】
上記目的を達成するため、本発明の1つは、エンジンの動力を受けて入力軸を回転し、この入力軸を回転させることによってカウンタシャフトを回転し、このカウンタシャフトの回転を速度に合わせた変速ギヤに噛み合いクラッチの締結・解除を行い自動変速してカウンタギヤを介して出力軸に伝達する噛み合い式の自動変速機にあって、噛み合いクラッチの切替の際、噛み合いクラッチのいずれもが変速ギヤに締結されない期間、入力軸の回転動力を出力軸に伝達するアシスト機構をカウンタシャフトに設け、更に、該アシスト機構のアシストギヤ比を変速ギヤで得られる変速比のうちの最高速段のギヤ比相当としたものである。こうした構成によって、アシスト機構を用いた変速は最高速度相当のギヤ比以下で行われるアップシフト、即ち、全てのアップシフトでアシスト変速が可能になる。
【0005】
上記目的を達成するため、本発明の他の1つは、アシスト機構を、カウンタシャフトの車体後方側端部に設けて構成したものである。
【0006】
上記目的を達成するため、本発明のさらに他の1つは、アシスト機構を、出力軸の中心軸を含む水平面より下方に位置するように設けて構成したものである。
【0007】
上記目的を達成するため、本発明のさらに他の1つは、アシスト機構を、噛み合いクラッチの切替指令が出力されると変速ギヤと現在締結している噛み合いクラッチが完全に解放される以前に締結し始め、該噛み合いクラッチが締結している変速ギヤから完全に解放されたときエンジントルクに応じて締結され入力軸の回転動力を出力軸に伝達し、切替指令に基づいて締結しようとしている変速ギヤに噛み合いクラッチが締結したときに解放するようにしたものである。
【0008】
上記目的を達成するため、本発明のさらに他の1つは、アシスト機構を、カウンタシャフトに固着され該カウンタシャフトと共に回転するクラッチ板と、カウンタシャフトに回転自在に設けられクラッチ板に押圧接することによりクラッチ板の回転を伝達するアシストギヤとによって構成されるアシストクラッチと、このアシストクラッチのアシストギヤに噛合し出力軸に固着される最高速段の出力ギヤとからなり、アシスト指令に基づいてクラッチ板の回転をアシストギヤ、出力ギヤを介して出力軸に伝達するようにしたものである。
【図面の簡単な説明】
【0009】
第1図は、本発明の一実施の形態をなす自動変速機の全体構成図である。
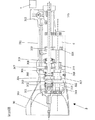
第2図は、図1に図示のアシスト機構の拡大図である。
第3図は、図1に図示の自動変速機の右側面図である。
第4図は、自動車の車体において本発明に係る自動変速機が配置される位置を示す図である。
第5図は、変速時のアシスト機構の締結・解放の動作を説明するための図である。
第6図は、変速時のアシスト機構の締結・解放の動作を説明するための図である。
第7図は、変速時のアシスト機構の締結・解放の動作を説明するための図である。
第8図は、本発明の自動変速機を用いた自動車の詳細な全体構成の一例である。
第9図は、変速時におけるアシストクラッチ伝達トルク制御指令処理のフローチャートである。
第10図は、エンジンへの制御指令を演算する制御処理のフローチャートである。
第11図は、変速時の制御状態を示すタイムチャートである。
第12図は、アシストギヤ比と変速可能領域の関係を説明するための図である。
第13図は、アシストギヤ比と出力軸トルクの関係を説明するための図である。
第14図は、アシストギヤ比と引き込みトルクの関係を説明するための図である。
第15図は、アシストギヤ比とアシストクラッチ回転数差の関係を説明するための図である。
第16図は、アシストギヤ比による比較を示す表である。
第17図は、本発明の一実施の形態をなすアシストギヤ比を3速ギヤ比とした場合の自動変速機の全体構成図である。
第18図は、本発明の別の実施の形態をなすアシストギヤ比を3速ギヤ比とした場合の自動変速機の全体構成図である。
【発明を実施するための最良の形態】
【0010】
以下、図1〜図7を用いて本発明に係る自動変速機の実施の形態を説明する。
図1は本発明の一実施の形態をなす自動変速機の全体構成図、図2は図1に図示のアシスト機構の拡大図、図3は図1に図示の自動変速機の右側面図、図4は自動車の車体において本発明に係る自動変速機が配置される位置を示す図、図5〜図7は変速時のアシスト機構の締結・解放の動作を説明するための図である。
【0011】
図1において、自動変速機3は、トランスミッションケース30内に収納されている。トランスミッションケース30内には、図示されていない発進クラッチの締結によって回転する入力軸300が回転自在に設けられている。この入力軸300の車両の後ろ方向端部には、ドライブギヤ301が設けられており、入力軸300が回転することによって回転するように構成されている。また、このドライブギヤ301に対向して、入力軸300の軸心と軸心が一致するように、入力軸300の延長線上にドライブギヤ301に非接触に出力軸323が回転自在に設けられている。
【0012】
また、出力軸323の下方、出力軸323に平行にカウンタシャフト315が回転自在に支持されている。このカウンタシャフト315の車体前方側端部には、カウンタドライブギヤ314が固着されている。このカウンタドライブギヤ314は、ドライブギヤ301に噛合されており、ドライブギヤ301によって回転するように構成されている。このドライブギヤ301は、発進クラッチの締結によってエンジンの回転が入力軸300に伝達されると、この入力軸300の回転によって回転する。このドライブギヤ301が回転すると、ドライブギヤ301に噛合されるカウンタドライブギヤ314が回転し、カウンタドライブギヤ314が固着しているカウンタシャフト315が回転するように構成されている。このカウンタシャフト315には、カウンタドライブギヤ314から車体後方側に所定間隔を置いてカウンタ3速ギヤ316が固着されており、このカウンタ3速ギヤ316から車体後方側に所定間隔を置いてカウンタ2速ギヤ317が固着されている。
【0013】
また、このカウンタ2速ギヤ317の車体後方側には、カウンタ2速ギヤ317から所定間隔を置いてカウンタ1速ギヤ318が固着されている。さらに、このカウンタ1速ギヤ318の車体後方側には、カウンタ1速ギヤ318から所定間隔を置いてカウンタ5速ギヤ3242が固着されている。
【0014】
このカウンタ3速ギヤ316には、3速ギヤ303が噛合しており、この3速ギヤ303は、出力軸323に回転自在に設けられている。そして、この出力軸323には、この3速ギヤ303とドライブギヤ301との間に、噛み合いクラッチ302が設けられており、この噛み合いクラッチ302は、出力軸323と係合している。すなわち、この噛み合いクラッチ302は、出力軸323に係合し、出力軸323上を摺動可能に構成されており、噛み合いクラッチ302をシフトすることによって噛み合いクラッチ302とドライブギヤ301とを締結(4速)して入力軸300の出力を出力軸323に伝達したり、噛み合いクラッチ302をシフトすることによって噛み合いクラッチ302と3速ギヤ303とを締結して入力軸300の出力をカウンタ3速ギヤ316を介して変速して出力軸323に伝達したりする。
【0015】
また、カウンタ2速ギヤ317には、2速ギヤ304が噛合しており、この2速ギヤ304は、出力軸323に回転自在に設けられている。さらに、カウンタ1速ギヤ318には、1速ギヤ306が噛合しており、この1速ギヤ306は、出力軸323に回転自在に設けられている。そして、この出力軸323には、2速ギヤ304と1速ギヤ306との間に、噛み合いクラッチ305が係合して設けられている。この噛み合いクラッチ305は、出力軸323上を摺動可能に構成されており、噛み合いクラッチ305を車体前方向にシフトすることによって2速ギヤ304に係合して入力軸300の出力をカウンタ2速ギヤ317を介して変速して伝達する。また、噛み合いクラッチ305を車体後方向にシフトすることによって1速ギヤ306と係合して、力軸300の出力をカウンタ1速ギヤ318を介して変速して伝達する。したがって、カウンタシャフト315が回転してカウンタ2速ギヤ317、カウンタ1速ギヤ318が回転していても、噛み合いクラッチ305が噛み合わない限りカウンタシャフト315の回転力は、出力軸323に出力されることはない。
【0016】
この噛み合いクラッチ302、噛み合いクラッチ305の操作は、シフトセレクト5のアクチュエータを作動することによって、ストライキングアーム312を介してストライキングロッド311を動かして行われる。このシフトセレクト5は、運転者のアクセル踏み込み量に基づいて出力されるアクセル指令値と、自動車の現在の車速から選択される変速ギヤに切り替える動作をするものである。
【0017】
一方、中間プレート307を挟んでカウンタシャフト315の車両後方側には、リバースカウンタギヤ319が固着されている。このリバースカウンタギヤ319は、車両がバックするときに作用するものである。このリバースカウンタギヤ319には、図3に示す如く、リバースシャフト321に回転自在に取り付けられたリバースアイドラーギヤ320が噛合しており、このリバースアイドラーギヤ320は、カウンタシャフト315の回転と共に回転するリバースカウンタギヤ319によって常時回転している。また、このリバースギヤ309は、出力軸323に回転自在に設けられており、このリバースギヤ309の車両前方には、噛み合いクラッチ308が出力軸323に係合して設けられている。
【0018】
さらに、カウンタシャフト315のリバースカウンタギヤ319から所定間隔置いて車両後方側には、カウンタ5速ギヤ322が固着されている。そして、このカウンタ5速ギヤ322には、5速ギヤ310が噛合しており、この5速ギヤ310は、出力軸323に回転自在に設けられている。この5速ギヤ310は、出力軸323に係合して設けられている噛み合いクラッチ308を締結することによって出力軸323に入力軸300の出力を伝達する。すなわち、この噛み合いクラッチ308は、出力軸323上を摺動可能に構成されており、噛み合いクラッチ308を車体後方向にシフトすることによって5速ギヤ310に係合して入力軸300の出力をカウンタ5速ギヤ322を介して変速して伝達するようになっている。したがって、カウンタシャフト315が回転してカウンタ5速ギヤ322が回転していても、噛み合いクラッチ308が噛み合わない限りカウンタシャフト315の回転力は、出力軸323に出力されることはない。
【0019】
また、カウンタシャフト315の配設位置は、図3に示す如く、出力軸323の中心軸を含む水平面より下方に位置するように形成されている。このカウンタシャフト315の配設位置は、出力軸323の中心軸を含む水平面より下方に位置するように形成するのであるが、出力軸323の中心軸を含む水平面より下方の位置であればよく、必ずしも特定されるものではないが、理想的には、出力軸323の中心軸に対し垂直の位置、すなわち、中心軸結線A上にカウンタシャフト315の中心軸がくるように構成することにより、アシスト機構をトランスミッションケース30の最下部に設けることができ、車内に出っ張ることなく取り付けられトランスミッションケースの内部の空間を有効に利用することができ、かつオイルによる冷却効果を期待することができ、ギヤオイル注入口に邪魔にならない位置に取り付けることができる。
【0020】
また、このカウンタシャフト315の車体後方側端部には、図2に示す如く、アシストクラッチ6が設けられている。このようにアシストクラッチ6をカウンタシャフト315の車体後方側端部に設けることにより、アシストクラッチ6に異常が起きた際、アシストクラッチ6の修理、交換等を容易に行うことができる。さらに、アシストクラッチ6をカウンタシャフト315に取り付けることにより、トランスミッションケース30の大きさを小さくすることができ、自動変速機3の構造を小型化することができる。また、アシストクラッチ6をカウンタシャフト315の車体後方側端部に設けるようにすることにより、組み付けを容易に行うことができる。
【0021】
この実施の形態においては、アシストクラッチ6を設ける位置をカウンタシャフト315の車体後方側端部としているが、アシストクラッチ6を設ける位置は、必ずしもをカウンタシャフト315の車体後方側端部である必要はなく、カウンタシャフト315上であれば何処でも良いが、アシストクラッチ6に異常が起きた際、アシストクラッチ6の修理、交換等を容易に行えるようにするために理想的には、カウンタシャフト315の車体後方側端部に設けるのがよい。
【0022】
また、このアシストクラッチ6は、図5に示す如く、クラッチ板61がカウンタシャフト315に固着されており、このクラッチ板61は、カウンタシャフト315の回転と共に常時回転している。このクラッチ板61に対向してクラッチ板61に押圧接する回転板を備えたアシストギヤ324がカウンタシャフト315に回転自在に設けられている。このアシストギヤ324には、アシスト出力ギヤ325が噛合されており、クラッチ板61とアシストギヤ324が締結されない限りアシストギヤ324は、出力軸323の回転によって回転するアシスト出力ギヤ325によって常時回転している。そして、クラッチ板61とアシストギヤ324が締結されると、カウンタシャフト315の回転力がクラッチ板61を介してアシストギヤ324に伝達され、アシストギヤ324を回転させ、このアシストギヤ324の回転によってアシスト出力ギヤ325を回転せしめ、アシストクラッチ6のアシスト力が出力軸323に付与される。
【0023】
このようにアシストギヤ324が、カウンタシャフト315とは無関係に回転するようにカウンタシャフト315に回転自在に設けられており、クラッチ板61がアシストクラッチ6の設けられたカウンタシャフト315に固着され、アシストクラッチ6を作動させてクラッチ板61とアシストギヤ324とを締結することによってカウンタシャフト315の回転がクラッチ板61を介して、アシストギヤ324、アシスト出力ギヤ325を通して出力軸323に伝達されるため、変速の際に、現在締結しているギヤを解除し、新しいギヤを締結するまでの入力軸300の回転が出力軸323に伝達されない間(中立時)、アシストクラッチ6の作動によって出力軸323に入力軸300の回転力をアシストすることができ、変速の際に、締結しているギヤを解除し、新しいギヤを締結するまでの間に生じるショック感を無くすことができる。
【0024】
また、リバースギヤ309の切替は、噛み合いクラッチ308によって行われる。この噛み合いクラッチ308は、出力軸323上を摺動可能に構成されており、噛み合いクラッチ308を車体前方向にシフトすることによって出力軸323に係合するリバースギヤ309とリバースアイドラーギヤ320が噛合し、リバースアイドラーギヤ320の回転がリバースギヤ309を介して出力軸323に伝達される。この噛み合いクラッチ308がリバースギヤ309に締結されると車両はバックで走行することになる。
【0025】
このように構成される自動変速機3は、図4に示す如く、車体1の走行方向中央に設けられてある。図中、2はエンジン、4は発進クラッチ、5はシフトセレクト、6はアシストクラッチ、7は油圧ユニット、8は表示装置である。
【0026】
次に、自動変速機3の動作について説明する。
まず、レンジレバーがパーキング(P)位置にあるか、ニュートラル(N)の位置に有るとき、運転者がスタータスイッチをONするとスタータモーターが回転し、エンジン2がスタートする。エンジン2がスタートした後、運転者がレンジレバーをドライブレンジ(D)位置に移動すると、シフトセレクト5がレンジレバーの指令を受けて、アクチュエータを作動し、出力軸323に係合している噛み合いクラッチ305を車両の後方向にシフトさせて1速ギヤ306に締結させる。この噛み合いクラッチ305と1速ギヤ306との締結によって、噛み合いクラッチ305と1速ギヤ306とカウンタ1速ギヤ318とが噛み合った状態になる。
【0027】
このとき、入力軸300の回転は、ドライブギヤ301からカウンタドライブギヤ314を介してカウンタシャフト315に伝達され、カウンタシャフト315を回転させ、このカウンタシャフト315の回転が、カウンタ1速ギヤ318を介して1速ギヤ306に伝達される。そして、この1速ギヤ306の回転と共に出力軸323が回転し、車輪が回転することになる。
【0028】
いま、噛み合いクラッチ305を車両の後方向にシフトさせて1速ギヤ306に締結させた状態では、入力軸300が回転しておらず、入力軸300に固着されているドライブギヤ301は回転していない。したがって、ドライブギヤ301に噛合されているカウンタシャフト315に固定されているカウンタドライブギヤ314も回転しない。したがって、このようにカウンタシャフト315が回転しないことによって、カウンタシャフト315に固定されているカウンタ1速ギヤ318も回転しない。
【0029】
しかる後、運転者がアクセルを操作すると、発進クラッチ4が徐々に繋がり、入力軸300が回転し始め、この入力軸300の回転は、ドライブギヤ301を回転させ、ドライブギヤ301に噛合されているカウンタドライブギヤ314に伝達され、カウンタシャフト315を回転させる。このカウンタシャフト315の回転は、カウンタ1速ギヤ318を回転させ、このカウンタ1速ギヤ318の回転が1速ギヤ306に伝達され、噛み合いクラッチ305によって締結されている出力軸323を回転させて車輪を回転させる。
【0030】
運転者がさらにアクセルを踏むと、エンジン回転数及び車速がさらに上昇し、踏み込んだアクセル量に対応するアクセル指令値が制御装置に入力され、アクセル指令値と車速とからギヤ位置が1速ギヤ306か2速ギヤ304かを判定し、2速ギヤ304の領域と判断すると、制御装置からシフトセレクト5に駆動指令が出力される。このシフトセレクト5の駆動指令に基づいて、アクチュエータを作動し、出力軸323に係合している噛み合いクラッチ305を車両の前方向にシフトさせて1速ギヤ306との噛み合いを解放し、さらに噛み合いクラッチ305を車両の前方向にシフトさせて2速ギヤ304に締結させる。この1速ギヤ306から2速ギヤ304に変速する際に、1速ギヤ306との締結が解除され、2速ギヤ304が締結される際に噛み合いクラッチ305が1速ギヤ306にも2速ギヤ304にも締結されていない一時的に無締結の状態になる。このとき運転者は、アクセルを踏み込んでいるのに加速感がなく、一時減速状態になるショックが生じる。この変速時に運転者が受けるショック感を解消するためにアシスト機構が作用する。
【0031】
この変速ギヤを切り替える変速のときのアシスト機構は、図5〜図7に示す如く動作する。ここでは2速ギヤ304から3速ギヤ303に切り替える場合を例にとって説明する。
【0032】
図5は、噛み合いクラッチ305が車両の前方向にシフトされて2速ギヤ304に締結されている状態を示している。
【0033】
この図5に示す状態は、カウンタシャフト315に固着され、カウンタシャフト315の回転と共に回転するカウンタ2速ギヤ317に噛合して回転する2速ギヤ304が、噛み合いクラッチ305を車体前方向にシフトすることによって出力軸323と締結され、出力軸323に入力軸300の回転力がカウンタ2速ギヤ317を介して伝達されている状態である。すなわち、入力軸300の回転力がドライブギヤ301からカウンタドライブギヤ314を介してカウンタシャフト315に伝達されカウンタシャフト315を回転し、このカウンタシャフト315の回転が、カウンタ2速ギヤ317を介して変速して伝達されている状態となっている。このとき、出力軸323の回転によってアシスト出力ギヤ325は回転しており、このアシスト出力ギヤ325に噛合するアシストギヤ324は、アシスト出力ギヤ325の回転によってカウンタシャフト315の上を空回りしている。
【0034】
したがって、この状態では、出力軸323に固着されているアシスト出力ギヤ325に噛合するアシストギヤ324は、図5に示す如く、カウンタシャフト315と締結されておらず、このアシストギヤ324は、出力軸323の回転によってアシスト出力ギヤ325を介してカウンタシャフト315上で、カウンタシャフト315とは無関係に回転している。このアシストギヤ324は、出力軸323が回転している限り、カウンタシャフト315上を常時空転した状態となっており、フライホイール330から発進クラッチ4を介して入力軸300に伝達される回転力は、アシストギヤ324に供給されていない。
【0035】
この状態から2速ギヤ304から3速ギヤ303に変速する動作指令が出力されると、噛み合いクラッチ305を車両の後方向にシフトして2速ギヤ304との締結を解放し、噛み合いクラッチ302を車両の後方向にシフトして3速ギヤ303と締結する。この変速動作指令が出力されると、アシストクラッチ6を作動する指令が出力され、噛み合いクラッチ305が2速ギヤ304との締結を解放される前にアシストクラッチ6が作動し、図6に示す如く、クラッチ板61を油圧で押圧してアシストギヤ324と締結する。その後、噛み合いクラッチ305と2速ギヤ304との締結が解放される。これによって、クラッチ板61の回転がアシストギヤ324を介してアシスト出力ギヤ325に伝達される。この図6は、噛み合いクラッチ305が2速ギヤ304に締結されておらず、かつ、噛み合いクラッチ302がと3速ギヤ303に締結されていない無締結の状態を示している。
【0036】
このアシストギヤ324の回転によって、カウンタシャフト315の回転は、アシストギヤ324に噛合するアシスト出力ギヤ325に伝達される。アシストギヤ324に締結されるクラッチ板61は、カウンタシャフト315に固着されているため、アシストクラッチ6が作動し、クラッチ板61とアシストギヤ324が締結されると、カウンタシャフト315によって回転するクラッチ板61の回転がアシストギヤ324を介してアシストギヤ324に噛合するアシスト出力ギヤ325に伝達され、アシスト出力ギヤ325を介してアシスト出力ギヤ325が固着された出力軸323に伝達される。
【0037】
このように2速ギヤ304から3速ギヤ303に変速する際に、2速ギヤ304、3速ギヤ303のいずれもが締結されていない無締結の状態が一時的に生じても、このアシストクラッチ6の作動によって、フライホイール330から発進クラッチ4を介して入力軸300に伝達される回転は、ドライブギヤ301→カウンタドライブギヤ314→カウンタシャフト315→クラッチ板61→アシストギヤ324→アシスト出力ギヤ325→出力軸323と伝達され、この変速時の無締結の状態のときに出力軸323に駆動力が作用しなくなるのを防止でき、変速時のショック感を和らげることができる。
【0038】
このアシスト機構によるアシストが行われた後、噛み合いクラッチ302が車両の後方向にシフトされ、3速ギヤ303と締結すると共にアシストクラッチ6が作動し、アシストギヤ324とクラッチ板61との締結が解除される。
【0039】
図7は、噛み合いクラッチ305は中立の位置に保持され、噛み合いクラッチ302が3速ギヤ303に締結され、アシストギヤ324とクラッチ板61との締結が解除された状態を示している。このように噛み合いクラッチ302が、3速ギヤ303に締結されると、入力軸300の回転は、ドライブギヤ301からカウンタドライブギヤ314を介してカウンタシャフト315に伝達され、このカウンタシャフト315の回転が、カウンタ3速ギヤ316を介して3速ギヤ303に伝達され、噛み合いクラッチ302によって出力軸323と締結された3速ギヤ303を介して出力軸323に与えられる。
【0040】
運転者がさらにアクセルを踏み込みスピードを上げようとすると、エンジン回転数が上昇し、上昇した回転数がドライブギヤ301を介してカウンタシャフト315の回転を上昇させる。車両の走行速度(車速)が3速ギヤ303で走行する限界にくると、制御装置は、アクセル指令値と車速とからギヤ位置が4速ギヤ301(ドライブギヤ)の領域に入ったことを検出し、制御装置からシフトセレクト5に駆動指令を出力する。そして、アクチュエータを作動し、出力軸323に係合している噛み合いクラッチ302を車両の前方向にシフトさせて3速ギヤ303との噛み合いを解放し、さらに噛み合いクラッチ302を車両の前方向にシフトさせて4速ギヤ301(ドライブギヤ)に締結させる。この3速ギヤ303から4速ギヤ301(ドライブギヤ)に変速されると、入力軸300の回転は、ドライブギヤ301から直接出力軸323に伝達され、入力軸300の回転そのものによって出力軸323を回転させる。
【0041】
この3速ギヤ303から4速ギヤ301に変速されるとき、3速ギヤ303と4速ギヤ301のいずれもが出力軸323と係合していない無締結の状態が一時あり、この無締結の状態のときは、運転者にアクセルを踏み込んでいるのに加速感がなく、変速時、一時減速状態になるショック感を与える。そこで、この変速時には、運転者のショック感を和らげるために前記同様アシストクラッチ6が作用する。このアシストクラッチ6の作用は、前述と同様である。
【0042】
また同様に、4速ギヤ301から5速ギヤ310に変速されるとき、4速ギヤ301と5速ギヤ310のいずれもが出力軸323と係合していない無締結の状態が一時あり、この無締結の状態のときは、運転者にアクセルを踏み込んでいるのに加速感がなく、変速時、一時減速状態になるショック感を与える。そこで、この変速時には、運転者のショック感を和らげるために前記同様アシストクラッチ6が作用する。このアシストクラッチ6の作用も、前述と同様である。
【0043】
変速ギヤが3速ギヤ303の状態の位置の時に、運転者がアクセルを緩めると、車両の走行速度は低下し、車速が落ちてくる。すると、制御装置は、クセル指令値と車速とからギヤ位置が3速ギヤ303の領域から、2速ギヤ304の領域に入ったことを検出し、制御装置からシフトセレクト5に駆動指令を出力する。そして、アクチュエータを作動し、出力軸323に係合している噛み合いクラッチ302を車両の前方向にシフトさせて3速ギヤ303との噛み合いを解放する。これと同時に、出力軸323に係合して無締結の位置にある噛み合いクラッチ305を車両の前方向にシフトさせて2速ギヤ304に締結させる。この噛み合いクラッチ305の2速ギヤ304への締結によって、噛み合いクラッチ305と2速ギヤ304とカウンタ2速ギヤ304とが噛み合った状態になる。
【0044】
このため、入力軸300の回転は、ドライブギヤ301からカウンタドライブギヤ314を介してカウンタシャフト315を回転させ、このカウンタシャフト315の回転が、カウンタ2速ギヤ317を介して2速ギヤ304に伝達され、この2速ギヤ304の回転と共に出力軸323が2速ギヤ304に見合った回転をすることになり、車速が低くなる。このように変速ギヤが3速ギヤ303の状態の時に、運転者がアクセルを緩めることによって、車両の走行速度が低下する場合は、車速が低下してきている状態での変速であるため、3速ギヤ303から2速ギヤ304に切り替わる際に一時的に無締結の状態が生じても変速によるショック感がないのでアシスト機構によるアシストは行われない。
【0045】
また、2速ギヤ304から1速ギヤ306への変速に当たっても3速ギヤ303から2速ギヤ304への変速の場合と同様、運転者がアクセルを緩めることによって車両の走行速度を減速させているわけであるから、2速ギヤ304から1速ギヤ306に切り替わる際に一時的に無締結の状態が生じても変速によるショック感がないのでアシスト機構によるアシストは行われない。
【0046】
以上までに変速動作の概要について説明したが、次に、本発明の自動変速機の制御に関して詳細な説明を行う。
【0047】
図8は本発明の自動変速機を用いる自動車の詳細な全体構成の一例である。
コントロールユニットは電子制御スロットル103を制御する電子制御スロットルコントロールユニット401とエンジンを制御するエンジンコントロールユニット402と変速機を制御する変速機コントロールユニット403と走行状態や制御状態を報知する報知コントロールユニット412とを備えている。
【0048】
エンジン101はエンジントルクを調整する電子制御スロットル103と、エンジン回転数を検出するエンジン回転数センサ102とその他センサ、アクチュエータを備えている。エンジン101はエンジンコントロールユニット402によって制御される。電子制御スロットル103は電子制御スロットルコントロールユニット401によって制御される。
【0049】
自動変速機3はアクチュエータ203、221、222、226を変速機コントロールユニット403で制御することにより動作する。
【0050】
変速機コントロールユニット403には、アクセル踏込み量を検出するアクセルペダルセンサ406と、シフトレバー位置を検出するインヒビタースイッチ407と、出力軸の回転数を検出する出力軸回転数センサ300と、自動変速モードと手動変速モードを切り換えるモードスイッチ408と、手動変速モードの時に変速段を1つ上げるプラススイッチ409と、手動変速モードの時に変速段を1つ下げるマイナススイッチ410等の自動車センサ信号が入力される。また、ランプ411等の表示器も付いている。また、変速機コントロールユニット403は、エンジンコントロールユニット402と電子制御スロットルコントロールユニット401と報知コントロールユニット412にCAN(Control Area Network)等の通信線404を介し接続されている。
【0051】
変速機コントロールユニット403は、取り込まれた各信号から運転状態を把握し、発進クラッチ状態、ギヤ位置を適切な状態に制御する。また、変速機コントロールユニット403は、自動変速モード時の変速中はエンジン101が吹き上がらないように、電子制御スロットルコントロールユニット401を介して電子制御スロットル103を制御する。また、変速機コントロールユニット403は変速直前の伝達トルクから変速直後の伝達トルクへ滑らかに変化させるように、電子制御スロットル103とアシストクラッチ6を制御する。更に、点火時期の補正値を変速機コントロールユニット403からエンジンコントロールユニット402に送り、点火時期を制御する。報知コントロールユニット412は運転状態や制御状態等を文字、記号等でディスプレイに表示したり、音声で報知する。このようにすることにより変速ショックの少ない円滑な走行を実現できる。
【0052】
ここで、図9〜図11を用いて、この実施の形態による自動変速機を用いた自動車の制御装置における変速時の制御方法について説明する。
【0053】
この制御は変速機コントロールユニット403等に搭載されているマイクロコンピュータに書かれたプログラムを実行することにより実現する。
【0054】
図9は、1速から2速への変速時におけるアシストクラッチ伝達トルク制御指令処理のフローチャートである。このプログラムは一定間隔(例えば10ms)の割込みにより起動し、実行される。
ステップ501
変速指令Ssを読み込む。
ステップ502
変速前(1速時)のエンジントルクTe1を読み込む。
ステップ503
ステップ502で読み込んだ変速前のエンジントルクTe1に基づいて、変速前(1速時)の出力軸トルクTout1を演算する。
ステップ504
ステップ503において演算した出力軸トルクTout1に基づいて、アシストクラッチ35のFF(フィードフォワード)目標トルクTc_ffを演算する。また、1速の変速比をR1、2速の変速比をR2とし、変速前のエンジン回転数をNe1とし、変速後(2速時)のエンジン回転数をNe2とすると、変速後のエンジン回転数Ne2はNe2≒Ne1×(R2/R1)として推定することができる。そして、推定したエンジン回転数Ne2とスロットル開度に応じて、変速後のエンジントルクを求めることができ、変速後の出力軸トルクTout2も推定することができる。この推定したTout2に応じて、アシストクラッチ35のFF目標トルクTc_ffを演算することができる。また、アシストクラッチ35のFF目標トルクTc_ffは、様々な走行状況に応じて所定の変速時間を満足するように、検出されたエンジン回転数NeおよびエンジントルクTeに基づいて、常時演算することにより求めてもよい。更に、アシストクラッチ35のFF目標トルクTc_ffは、常時推定あるいは検出したエンジントルクに応じたトルク成分と、所定時間内にエンジン回転数を変速後のギヤ比に応じた回転数まで下げるためのイナーシャトルク成分から演算してもよい。
【0055】
ステップ505
エンジン回転数Ne(入力軸回転数Nin)と出力軸回転数Noとから求まる入出力軸回転数比Rchが所定の範囲内であるかどうかを判定する。所定の範囲内でない場合にはステップ506に進み、所定の範囲内である場合にはステップ507に進む。
ステップ506
変速中において、入出力軸回転数比Rchが所定の範囲内でない場合には、変速中のトルク低下補正値Tc_refをTc_ref=Tc_ffとして演算する。
ステップ507
変速中において、入出力軸回転数比Rchが所定の範囲内である場合には、2速の変速比に相当する目標回転数比と、入出力軸回転数比Rchとの偏差をフィードバックして、アシストクラッチ6の回転数比FB(フィードバック)目標トルクTc_fbを演算する。このとき、目標回転数比に応じて、目標エンジン回転数(入力軸回転数)を演算して、エンジン回転数Neをフィードバックして、アシストクラッチ6の回転数比FB目標トルクTc_fbを演算してもよい。また、変速中の目標回転数(入力軸回転数)は、変速前のギヤ比から変速後のギヤ比に滑らかに変化するようなギヤ比を逐次設定して、演算してもよい。
ステップ508
変速中のアシストクラッチ6の伝達トルク指令Tc_refをTc_ref=Tc_ff+Tc_fbとして演算する。
ステップ509
ステップ506およびステップ508により求めた変速中のアシストクラッチ6の伝達トルク指令Tc_refをアシストクラッチ6の目標伝達トルクとして出力する。出力された伝達トルク指令Tc_refの値に基づいて、アクチュエータ226はアシストクラッチ6の押し付け力を調整して変速中の伝達トルクを実現する。
【0056】
以上説明したように、変速中におけるアシストクラッチ6による出力軸223への伝達トルク実現することにより、変速性能を向上することができる。
【0057】
次に、変速中におけるエンジン101への制御指令に関して説明する。
この制御は変速機コントロールユニット403等に搭載されているマイクロコンピュータに書かれたプログラムを実行することにより実現する。
【0058】
図10は、エンジン101への制御指令を演算する制御処理のフローチャートである。このプログラムは一定間隔(例えば10ms)の割込みにより起動し、実行される。
ステップ601
エンジン回転数Ne(入力軸回転数Nin)と出力軸回転数Noに基づいて求めた入出力軸回転数比Rchが所定の範囲内であるかどうかを判定する。所定の範囲内でない場合にはステップ602に進んでトルク制御処理1を行い、所定の範囲内である場合にはステップ603に進んでトルク制御処理2を行う。
まず、ステップ602〜ステップ604で実行するトルク制御処理1の内容を説明する。
ステップ602
Tc_ref=Tc_ffにより求めたアシストクラッチ6の伝達トルク指令値Tc_refを読み込む。
ステップ603
ステップ602において読み込んだ伝達トルク指令値Tc_refに基づいて、所定の入出力軸回転数比Rchを実現するエンジン回転数Neを達成するようなエンジン目標トルクTe_ref1を演算する。
ステップ604
ステップ603において求めたエンジン目標トルクTe_ref1を出力する。出力したエンジン目標トルクTe_ref1は、CANにより電子制御スロットルコントローラ401に送信する。
電子制御スロットルコントローラ401は、エンジン目標トルクTe_ref1を達成するように電子制御スロットル103を制御する。
また、エンジン目標トルクTe_ref1を達成するために、前記エンジン101の空燃比を制御しても良いし、点火時期を制御しても良い。
以上のように、変速中における入力軸回転数を制御して噛合いクラッチを2速に連結することが可能となり、2速連結時のイナーシャトルクを抑制して、変速性能を向上することができる。更に、アシストクラッチ6の伝達トルク指令は、エンジン101のトルクに応じて演算されるため、アシストクラッチ6の伝達トルクを変更することができるので、出力軸トルクを調整することができる。
【0059】
次に、ステップ605〜607で実行するトルク制御処理2の内容を説明する。
ステップ605
Tc_ref=Tc_ff+Tc_fbにより求めたアシストクラッチ6の伝達トルク指令値Tc_refを読み込む。
ステップ606
ステップ605により読み込んだ伝達トルク指令値Tc_refに基づいて、変速後の出力軸トルクと伝達トルク指令値Tc_refとの偏差が少なくなるような、エンジン目標トルクTe_ref2を演算する。
ステップ607
ステップ606により求めたエンジン目標トルクTe_ref2を出力する。出力したエンジン目標トルクTe_ref2は、CANにより電子制御スロットルコントローラ401に送信する。
電子制御スロットルコントローラ401は、エンジン目標トルクTe_ref2を達成するように電子制御スロットル103を制御する。
また、エンジン目標トルクTe_ref2を達成するために、前記エンジン101の空燃比を制御しても良いし、点火時期を制御しても良い。
以上のように、変速終了時における入力軸トルクを制御することにより、変速中におけるアシストクラッチ6の伝達トルク指令値と、変速後における出力軸トルクとの偏差を少なくすることが可能となり、トルク段差を軽減して変速性能を向上することができる。
【0060】
次に、1速から2速への変速時の動作について説明する。
図11は、変速時の制御状態を示すタイムチャートである。図11において、(A)は変速指令Ss、(B)は噛合いクラッチ位置に相当するシフトレバー位置Ii、(C)は入出力軸回転数比Rch、(D)はスロットル開度θ、(E)はアシストクラッチ6のトルクTc、(F)は出力軸トルクToutを示している。また、横軸は時間を示している。
【0061】
(A)に示すように、1速状態で走行中にa点で2速状態への変速指令Ssが出力されると変速制御を開始し、(E)で示すように、アシストクラッチ6のトルクTcが徐々に増加する。
アシストクラッチ6のトルクTcが増加していくと、(F)に示すように、出力軸トルクToutが徐々に減少し、b点で、1速側に連結していた噛合いクラッチが解放可能状態となる。
【0062】
1速噛合いクラッチが解放可能になると、アクチュエータ221の制御によって、1速側に連結していた噛合いクラッチを解放し、(B)に示すように、シフトレバー位置Iiが中立状態(変速中)となって実際の変速を開始する。
シフトレバー位置Iiが中立状態になると、(E)で示すように、変速中のトルク低下分を補正するアシストクラッチ6の制御を開始し、アシストクラッチ伝達トルク制御指令処理ルーチンで求めたアシストクラッチ6の目標トルクTc_ref=Tc_ffの値に従ってアクチュエータ226を制御することにより、(F)で示すように、変速中における出力軸トルクを実現する。
【0063】
このとき、アシストクラッチ6によって伝達するトルクが出力軸トルクとなるので、乗員の違和感を軽減するためには、アシストクラッチ6の目標トルクTc_refを滑らかな特性とすることが望ましい。また、変速中は、入出力軸回転数比Rchを、2速の変速比R2になるよう速やかに、且つスムースに制御する必要がある。
従って、トルク制御処理1により出力したエンジン目標トルクTe_ref1を達成するように、(D)に示すように、スロットル開度をθ=θ_ref1となるように制御してエンジン101のトルクを制御する。この結果、エンジン回転数Neが変化し、入出力軸回転数比Rchが2速の変速比R2に近づいていく。
【0064】
このようなアシストクラッチ6および電子制御スロットル103の制御により、(C)に示すように、入出力軸回転数比Rchは、c点においてRch=R2となるが、噛合いクラッチを連結させるためには、エンジン回転数Neを増加する方向にして入出力軸回転数比Rchを2速の変速比R2に合わせることが望ましい。これは、変速中に演算されたアシストクラッチ6の伝達トルク指令値によって出力軸回転数Noが増加しているので、入力軸回転数が減少する方向にあるときに連結させようとすると、噛合いクラッチの噛み合い部分にトルクの干渉が生じて連結しにくいという問題があり、入力軸回転数が増加する方向で噛合いクラッチを連結させる方がトルクの干渉が少なくなるためである。
【0065】
c点からはRch<R2となるので、入出力軸回転数比Rchを増加させる必要があるが、連結する直前(c〜d点間)においては、エンジントルクTeの制御では応答に若干の遅れがあるので、入出力軸回転数比Rchをアシストクラッチ6のトルクにより調整することが望ましい。このために、c点からd点までの期間は、入出力軸回転数比Rchと、2速の変速比R2との偏差に応じたアシストクラッチ6の回転数比FB目標トルクTc_fbを付加して、アシストクラッチ6の目標トルクをTc_ref=Tc_ff+Tc_fbに設定する。
【0066】
このように、入出力軸回転数比Rchと2速の変速比R2との偏差が少ない期間のみ、回転数比をフィードバックすることにより、変速中の伝達トルク指令値のトルク変動を最小限に抑制することができ、乗員の違和感を緩和することができる。このようなアシストクラッチ6の回転数比FB制御により、入出力軸回転数比Rchが増加する方向でRch≒R2となり、噛合いクラッチが2速に連結可能な状態となる。
【0067】
噛合いクラッチが2速連結可能状態になると、アクチュエータ221を制御することによって噛合いクラッチを2速に連結させることになるが、このとき、変速中のアシストクラッチ6の伝達トルク指令値Tc_ref=Tc_ff+Tc_fbと、変速後(2速連結後)における出力軸トルクとの偏差を小さくして、変速終了時の出力軸トルク段差を軽減することが望ましい。
【0068】
変速中の伝達トルク指令値はアシストクラッチ6のトルクTcにより決定され、変速後における出力軸トルクは、エンジントルクTeと2速の変速比R2とにより決定されるので、c〜d点間においては、エンジン目標トルクTe_ref2を達成するよう、スロットル開度をθ=θ_ref2に制御する。変速中においては、アシストクラッチ6が滑り状態となっているので、エンジン101のトルクTeが所定の値よりも大きい場合には、変速中における伝達トルク指令値はアシストクラッチ6のトルクTcによって決まるので、変速終了時のトルク合せ制御は、変速中のアシストクラッチ伝達トルク制御から独立して行うことができる。
【0069】
d点で、噛合いクラッチが2速に連結して、実際の変速を完了すると、スロットル開度θを徐々に変速前の開度まで戻していき、e点で変速制御を終了する。
【0070】
以上に説明したように、この実施の形態によれば、変速の際に、変速中における出力軸トルク低下補正値を求め、このトルク低下補正値に基づいて、入力軸回転数を制御し、変速終了時に入力軸トルクを調節することで、出力軸トルク変動を抑制することができる。
【0071】
本実施の形態によれば、1速から2速へ、2速から3速へ、3速から4速へ、4速から5速へ変速する場合の無締結の状態において、アシストクラッチ6によって出力軸323への回転をアシストするため、加速している状態に無締結の状態でも加速の動力が出力軸323に伝達され、運転者に減速したような一種のショック感を与えるのを和らげることができる。すなわち、変速ギヤと出力軸とを締結及び解放するクラッチを設けた噛み合い式変速機を用いても、加速時におけるクラッチの締結・解放の際のショック感を和らげることができる。
【0072】
また、本実施の形態によれば、複数の噛み合いクラッチ302、305、308を複数の変速ギヤ301、303、304、306、310に締結して入力軸300の動力を出力軸323に伝達する噛み合い式変速機を用い、任意の変速ギヤ301、303、304、306、310と出力軸323とを締結及び解放する複数の噛み合いクラッチ302、305、308をアクセル指令値と車速から決まる変速ギヤに締結制御して自動変速を実行する自動変速機に、噛み合いクラッチを切り替える場合のいずれの噛み合いクラッチも前記複数の変速ギヤのいずれにも締結されない間、入力軸300の回転動力を出力軸323に伝達するアシスト機構を設けているため、加速時におけるクラッチの締結・解放の際のショック感を解消することができる。
【0073】
さらに、本実施の形態によれば、車輪に駆動力を付与する出力軸323に回転自在に設けられる複数の変速ギヤ301、303、304、306、310と、この出力軸323に係合する複数の噛み合いクラッチ302、305、308と、複数の変速ギヤ301、303、304、306、310に噛合しエンジン2の動力を受けて回転する入力軸300の回転を受けて回転するカウンタシャフト315に固着する各速度に対応した複数の変速ギヤ301、303、304、306、310とを備え、アクセル指令値と車速から決まる複数の変速ギヤ301、303、304、306、310の内の任意の変速ギヤ301、303、304、306、310に複数の噛み合いクラッチ302、305、308の内の一を締結制御して自動変速を実行する噛み合い式の自動変速機を用い、複数の噛み合いクラッチ302、305、308の内、締結されている噛み合いクラッチを解除し複数の噛み合いクラッチ302、305、308の内のいずれかの噛み合いクラッチを締結する切替の際、複数の噛み合いクラッチ302、305の内のいずれの噛み合いクラッチも複数の変速ギヤ301、303、304、306、310のいずれにも締結されていない無締結の間、カウンタシャフト315の回転を受けて回転するアシストシャフト31を介して入力軸300の回転動力を出力軸323に伝達してアシストするアシスト機構を設けているため、変速ギヤを切り替える際に、噛み合いクラッチと変速ギヤが締結されていない無締結の間、入力軸300(カウンタシャフト315)の回転を出力軸323にアシストでき、変速ギヤ301、303、304、306、310と出力軸323とを締結及び解放するクラッチを設けた噛み合い式変速機を用いても、加速時におけるクラッチの締結・解放の際のショック感を和らげることができる。
【0074】
さらに、本実施の形態によれば、カウンタシャフト315の配設位置を、出力軸323の中心軸を含む水平面より下方に位置するように形成しているため、アシスト機構をトランスミッションケース30の最下部に設けることができ、車内に出っ張ることなく取り付けられトランスミッションケースの内部の空間を有効に利用することができ、かつオイルによる冷却効果を期待することができ、ギヤオイル注入口に邪魔にならない位置に取り付けることができる。
【0075】
さらにまた、本実施の形態によれば、アシストクラッチ6をカウンタシャフト315の車体後方側端部に設けているため、アシストクラッチ6に異常が起きた際、アシストクラッチ6の組み付けを容易に行うことができ、アシストクラッチ6の修理、交換等も容易に行うことができる。
【0076】
またさらに、アシストクラッチ6をカウンタシャフト315に取り付けることにより、トランスミッションケース30の大きさを小さくすることができ、自動変速機3の構造を小型化することができる。
【0077】
ここで、上記の例にて説明したように、アシストギヤ324とアシスト出力ギヤ325及びアシストクラッチ6によって変速中のトルク伝達を実現することでかみ合いクラッチ302、305、308の解放・締結による変速時に発生するショック感を和らげることができる。このとき、変速中に出力軸323へ伝達されるトルクは、アシストクラッチ6、アシストギヤ324、アシスト出力ギヤ325によって決定される。従って、実際に変速機に組み込むためには、アシストギヤ324とアシスト出力ギヤ325を性能、耐久性などの観点から適当に選定する必要がある。以下では、このアシストギヤ324とアシスト出力ギヤ325の選定に関して説明する。
【0078】
図12〜16に本発明におけるアシストギヤ324とアシスト出力ギヤ325の歯車選定について示す。歯車の選定のパラメータは、アシストギヤ324とアシスト出力ギヤ325の歯車比で表現できる。また、入力軸300、カウンタシャフト315、出力軸323からなる変速機における変速ギヤ比は、入力軸300のドライブギヤ301、カウンタシャフト315のカウンタドライブギヤ314のギヤ比とカウンタシャフト315の歯車(カウンタ3速ギヤ316、カウンタ2速ギヤ317、カウンタ1速ギヤ318、カウンタ5速ギヤ322)と出力軸323の歯車(3速ギヤ303、2速ギヤ304、1速ギヤ306、5速ギヤ310)のギヤ比の積で記述される。
【0079】
そこで、以下では、通常の変速ギヤ比と比較するために、アシストギヤ324とアシスト出力ギヤ325のギヤ比にドライブギヤ301とカウンタドライブギヤ314のギヤ比を掛けたギヤ比(以下、アシストギヤ比と呼ぶ)を用いたアシストギヤ324とアシスト出力ギヤ325の選定方法について示す。
【0080】
アシストギヤ比は、変速中に入力軸300から出力軸323へ伝達するトルクやトルク伝達を行うアシストクラッチ6の入力側と出力側の回転数差に関わるため、アシストクラッチ6を用いた変速可能領域、変速性能、耐久性等に大きく影響する。このため、アシストギヤ比の設定は重要である。
【0081】
図12にアシストギヤ比と変速可能領域の関係を示す。縦軸は回転数比(入力軸300の回転数/出力軸323回転数)、横軸はアシストギヤ比である。ギヤ比は1速:3.321、2速:1.902、3速:1.308、4速:1.000、5速:0.759とする。前述したように変速時はアシストクラッチ6の締結力を制御し、入力軸300と出力軸323の回転数比を目標のギヤ比に合わせてから変速する。そのため、アシストギヤ比を3速にした場合は、入力軸300と出力軸323との回転数比は、3速ギヤ比より小さいギヤ比にはできないので、アシストクラッチ6を用いた変速は、1−2、1−3、2−3変速のみに対応できることになる。
【0082】
一方、アシストギヤ比を5速にした場合では、アシストクラッチ6を用いた変速は、1速から5速までのアップシフト全てに対応できる。このように変速可能領域はアシストギヤ比までとなる。全てのアップシフトにおいてアシストクラッチを用いた変速を行うためには、アシストギヤ比を最高速段と同じギヤ比にすればよいことになる。
【0083】
このとき、出力軸323へ伝達されるトルクを考えると、変速前は、かみ合いクラッチ302、305、308のいずれかによって締結されている変速段のギヤ比によってエンジントルクが出力軸323へ伝達されている。そして、変速が開始され、かみ合いクラッチ302、305、308が解放されると、エンジントルクはアシストギヤ比によって出力軸323へ伝達される。従って、変速開始・終了時点には変速前後の変速段のギヤ比とアシストギヤ比の差に応じたトルク段差が発生する。このトルク段差に対処する例を以下、参考例として説明する。
【0084】
従って、アシストギヤ比をギヤ比の小さい最高速段と同じギヤ比にすると、変速時の出力軸323のトルクが小さくなり、変速後の出力軸323のトルクとの間に大きな差ができ、変速ショックを感じる。この出力軸323のトルク差を引き込みトルクと呼ぶ。
【0085】
図13にアシストギヤ比と出力軸323のトルクの関係を示す。縦軸上が回転数比、縦軸下が出力軸323のトルク、横軸は時間で1速から5速まで変速した時の回転数比と出力軸323のトルクの動きを表している。実線がアシストギヤ比を3速ギヤ比相当とした時の出力軸323のトルク、点線がアシストギヤ比を5速ギヤ比相当とした時の出力軸323のトルクである。エンジントルクは200[Nm]一定とする。1−2変速時では、アシストギヤ比を3速ギヤ比相当とした時の引き込みトルクは118[Nm]、アシストギヤ比を5速ギヤ比相当とした時の引き込みトルクは228[Nm]となり、3−4変速時では、アシストギヤ比を3速ギヤ比相当とした時は、アシストクラッチ6によるトルク伝達は行わないので、引き込みトルクは200[Nm]、アシストギヤ比を5速ギヤ比相当とした時の引き込みトルクは48[Nm]となる。一般に0.1[G]程度の車両加速度変化ならば乗員は不快感を感じないが、0.2[G]以上では不快感を感じるといわれている。100[Nm]はおよそ0.1[G]の車両加速度変化であるので、引き込みトルクは、100[Nm]以下であることが望ましい。よって変速ショックを抑制するにはアシストギヤ比をあまり小さくしない方がよい。
【0086】
図14にアシストギヤ比毎の各変速での引き込みトルクの関係を示す。縦軸が引き込みトルク、横軸が各変速時期である。二点鎖線がアシストギヤ比を2速ギヤ比相当とした時、実線がアシストギヤ比を3速ギヤ比相当とした時、一点鎖線がアシストギヤ比を4速ギヤ比相当とした時、点線がアシストギヤ比を5速ギヤ比相当とした時の引き込みトルクである。エンジントルクは200[Nm]一定とする。各アシストギヤ比において必ず引き込みトルクが大きくなるところがある。しかし実用域で考えると、200[Nm]の高エンジントルクでの変速が起るのは1−2、2−3変速が多く、3−4、4−5変速はほとんど発生しない。3−4、4−5変速は低エンジントルクで頻繁に発生する。よって3−4、4−5変速での引き込みトルクは実用域では小さくなる。このことから1−2、2−3変速での引き込みトルクが重要となってくる。1−2変速ではアシストギヤ比4速、5速時の引き込みトルクが大きく、変速性能が悪いので、アシストギヤ比を2速ギヤ比相当より大きく、4速ギヤ比相当より小さいギヤ比にすることが好ましい。しかし、アシストギヤ比を3速ギヤ相当より小さいギヤ比にすると(例えば2速ギヤ比)にすると2−3変速はアシストクラッチ6によるトルク伝達を行うことが出来ない変速となり、変速性能が悪化する。よって変速性能を満足するにはアシストギヤ比を3速ギヤ比以上から4速ギヤ比より小さくすることが好ましい。
【0087】
図15にアシストギヤ比とアシストクラッチ回転数差の関係を示す。縦軸は、アシストクラッチ回転数差、横軸は、入力軸300の回転数である。二点鎖線がアシストギヤ比を3速ギヤ比相当とした場合、実線がアシストギヤ比を3速ギヤ比相当とした時、一点鎖線がアシストギヤ比を4速ギヤ比相当とした時、点線がアシストギヤ比を5速ギヤ比相当とした時のアシストクラッチ回転数差で、1速走行時と5速走行時を示してある。アシストクラッチ回転数差とは定速ギヤ走行時のアシストクラッチの入力側と出力側の回転数の差で
入力軸300の回転数−出力軸323の回転数/締結ギヤ比×アシストギヤ比
で計算される。この差が大きいとアシストクラッチの摩耗の原因となり、アシストクラッチの耐久性が悪くなる。1速走行時は入力軸回転数が低い領域から高い領域まで全域にわたり走行する。このためアシストギヤ比を4速ギヤ比相当とする時や5速ギヤ比相当とする時で入力軸300が高回転の時に耐久性に問題が出てくる。5速走行時の入力軸300の回転数は4000[rpm]以上になることはほとんど無いが、アシストギヤ比が2速ギヤ比相当の場合はアシストクラッチ回転数差が−6000[rpm]近くとなり、耐久性に問題が出てくる。また、アシストギヤ比を低速にするほど、アシストクラッチの使用頻度が下がるので、耐久性は向上する。
【0088】
これらの検討結果をまとめたものを図16に示す。変速可能領域はアシストギヤ比を高速段に相当するギヤ比にする方が良いが、変速性能、耐久性でアシストギヤ比を3速ギヤ比相当にすることが好ましいことが分かる。
【0089】
よって、アシストギヤ比の設定としては、3速ギヤ比と同じに設定する方法がある。更に、アシストギヤ比を3速ギヤ比よりも小さい、例えば、3速ギヤ比と4速ギヤ比の中間のギヤ比に設定してもよい。この場合、2−3変速時において入力軸300の回転数と出力軸323の回転数の比を3速ギヤ比よりも小さくすることが可能となり、1−2変速と同じ変速性能にすることが可能となる。
【0090】
また、アシストギヤ比を3速にすることにより、発進クラッチが壊れた場合にアシストクラッチを使い3速発進するというフェール機構としても利用できる。
【0091】
以上では5速の変速機を例にアシストギヤ比の設定について説明したが、5速変速機のみにとどまらず、5速以下の変速機や6速、7速以上の変速機でも同様の考え方で行えば良い。
【0092】
図17には、5速変速機を例とした場合で、アシストギヤ比を3速ギヤ比と同じにした場合の実施例を示す変速機構成図である。図17では、アシストギヤ324とアシスト出力ギヤ325とドライブギヤ301とカウンタドライブギヤ314によって3速ギヤ比を実現している。ここでは、アシストギヤ比を3速ギヤ比相当としたが、3速ギヤ比と4速ギヤ比の中間のギヤ比を実現するようにアシストギヤ324とアシスト出力ギヤ325を設定することも可能である。図17では、アシストギヤ324とアシスト出力ギヤ325とアシストクラッチ6によって入力軸300から導入されるトルクを出力軸323に伝達させるが、アシストギヤ比を3速とした場合には、通常の3速走行時は、かみ合いクラッチ320によって3速ギヤ303を出力軸323に締結させて、カウンタ3速ギヤ316と3速ギヤ303によって3速走行を実現し、変速中のトルク伝達以外にはアシストクラッチ6を用いないようにすることができ、耐久性面で有利である。また、3速ギヤ303を出力軸323に締結させるかみ合いクラッチが故障した場合には、アシストクラッチ6を締結させて3速走行状態を実現することもできる。
【0093】
図18には、5速変速機を例とした場合で、アシストギヤ比を3速ギヤ比と同じにした場合の別の実施例を示す変速機構成図である。図18では、アシストギア324とアシスト出力ギヤ325とドライブギヤ301とカウンタドライブギヤ314によって3速ギヤ比を実現している。更に、図17の実施例における5速ギヤを取り除き、5速ギヤを図17の3速ギヤ位置に配置した例である。
【0094】
図18の構成では、アシストクラッチ6は、変速中のトルク伝達以外にも、3速走行状態にアシストクラッチ6を完全に締結させ、アシストギヤ324とアシスト出力ギヤ325を用いて3速走行を実現する場合にも用いられる。図18のようにアシストギヤを通常の走行ギヤを共有化することで、変速機内の歯車数を減らすことが可能となる。
【産業上の利用可能性】
【0095】
以上の説明したように本発明によれば、加速時におけるクラッチの締結・解放の際のショック感を和らげることができる。
Claims (12)
- エンジンの動力を導入する入力軸と、複数の変速ギヤと、複数の噛み合いクラッチと、駆動力を出力する出力軸と、カウンタシャフトと、カウンタギヤとを備え、エンジンの動力を受けて入力軸を回転し、該入力軸を回転させることによってカウンタシャフトを回転し、該カウンタシャフトの回転を速度に合わせた変速ギヤに噛み合いクラッチの締結・解除を行い自動変速してカウンタギヤを介して出力軸に伝達する噛み合い式の自動変速機であって、
前記変速の際にギヤを解除し、新しいギヤを締結するまでの間、前記カウンタシャフトの回転をアシストギヤを介して前記出力軸に伝達するアシスト機構を前記カウンタシャフトに設け、
前記アシストギヤのギヤ比を前記変速ギヤで得られる変速比のうちの最高速段のギヤ比相当としたことを特徴とする自動変速機。 - 前記アシスト機構は、前記カウンタシャフトの車体後方側端部に設けたことを特徴とする請求項1に記載の自動変速機。
- 前記アシスト機構は、前記出力軸の中心軸を含む水平面より下方に位置するように設けたことを特徴とする請求項1又は2に記載の自動変速機。
- 前記アシスト機構は、前記噛み合いクラッチの切替指令が出力されると変速ギヤと現在締結している噛み合いクラッチが完全に解放される以前に締結し始め、該噛み合いクラッチが締結している変速ギヤから完全に解放されたとき、入力軸の回転動力を出力軸に伝達し、切替指令に基づいて締結しようとしている変速ギヤに噛み合いクラッチが締結したときに解放するようにしたことを特徴とする請求項1、2又は3に記載の自動変速機。
- 前記アシスト機構は、前記カウンタシャフトに固着され該カウンタシャフトと共に回転するクラッチ板と、前記カウンタシャフトに回転自在に設けられ前記クラッチ板に押圧接することにより該クラッチ板の回転を伝達するアシストギヤとによって構成されるアシストクラッチと、該アシストクラッチのアシストギヤに噛合し前記出力軸に固着される出力ギヤとから成り、アシスト指令に基づいて前記クラッチ板の回転を前記アシストギヤ、前記出力ギヤを介して出力軸に伝達することを特徴とする請求項1、2、3又は4に記載の自動変速機。
- エンジンの動力を導入する変速機の入力軸と、
前記変速機の動力を出力する出力軸と、
前記入力軸の動力が入力歯車列を介して伝達されるカウンタ軸と、
該カウンタ軸と前記出力軸の間に複数の出力歯車列を有し、
該複数の出力歯車列及び前記入力軸と前記出力軸の間にかみ合いクラッチを設け、
該かみ合い式クラッチの締結・解放によって、前記エンジンから前記入力軸へ導入された動力を前記出力軸へ伝達する歯車式変速機において、
前記かみ合いクラッチの締結・解放の切り換え時に、前記カウンタ軸からアシストギヤを介して前記出力軸へ動力を伝達するアシスト機構をカウンタ軸に設け、
前記アシストギヤのギヤ比を前記変速ギヤで得られる変速比のうちの最高速段のギヤ比相当としたことを特徴とする自動変速機。 - エンジンの動力を導入する変速機の入力軸と、
前記変速機の動力を出力する出力軸と、
前記入力軸の動力が入力歯車列を介して伝達されるカウンタ軸と、
該カウンタ軸と前記出力軸の間に複数の出力歯車列を有し、
該複数の出力歯車列及び前記入力軸と前記出力軸の間にかみ合いクラッチを設け、
該かみ合い式クラッチの締結・解放によって、前記エンジンから前記入力軸へ導入された動力を前記出力軸へ伝達する歯車式変速機において、
前記カウンタ軸に摩擦クラッチを設け、
前記かみ合いクラッチの締結・解放の切り換え時に、前記摩擦クラッチによって前記カウンタ軸からアシストギヤを介して前記出力軸へ動力を伝達するアシスト機構を設け、
前記アシストギヤのギヤ比を前記変速ギヤで得られる変速比のうちの最高速段のギヤ比相当としたことを特徴とする自動変速機。 - エンジンの動力を導入する変速機の入力軸と、
前記変速機の動力を出力する出力軸と、
前記入力軸の動力が入力歯車列を介して伝達されるカウンタ軸と、
該カウンタ軸と前記出力軸の間に複数の出力歯車列を有し、
該複数の出力歯車列及び前記入力軸と前記出力軸の間にかみ合いクラッチを設け、
該かみ合い式クラッチの締結・解放によって、前記エンジンから前記入力軸へ導入された動力を前記出力軸へ伝達する歯車式変速機において、
前記カウンタ軸に空転するアシストカウンタ歯車を設け、
前記出力軸に固定され且つ前記アシストカウンタ歯車と噛み合うアシスト出力歯車を設け、
前記アシストカウンタ歯車と前記カウンタ軸の間に摩擦クラッチを設け、
前記噛み合いクラッチの締結・解放の切り換え時に、前記摩擦クラッチによって前記アシストカウンタ歯車と前記アシスト出力歯車を介して前記カウンタ軸から前記出力軸へ動力を伝達するアシスト機構を設け、
前記アシストカウンタ歯車と前記アシスト出力歯車とのギヤ比を前記入力歯車列と前記出力歯車列で得られる変速比のうちの最高速段のギヤ比相当としたことを特徴とする自動変速機。 - エンジンの動力を導入する変速機の入力軸と、
前記変速機の動力を出力する出力軸と、
前記入力軸の動力が入力歯車列を介して伝達されるカウンタ軸と、
該カウンタ軸と前記出力軸の間に複数の出力歯車列を有し、
該複数の出力歯車列及び前記入力軸と前記出力軸の間に噛み合いクラッチを設け、
該噛み合い式クラッチの締結・解放によって、前記エンジンから前記入力軸へ導入された動力を前記出力軸へ伝達する歯車式変速機において、
変速段として用いられる歯車とは異なるアシストカウンタ歯車を前記カウンタ軸に空転するように設け、
変速段として用いられる歯車とは異なるアシスト出力歯車を前記アシストカウンタ歯車と噛み合って前記出力軸に固定するように設け、
前記アシストカウンタ歯車と前記カウンタ軸の間に摩擦クラッチを設け、
前記噛み合いクラッチの締結・解放の切り換え時に、前記摩擦クラッチによって前記アシストカウンタ歯車と前記アシスト出力歯車を介して前記カウンタ軸から前記出力軸へ動力を伝達するアシスト機構を設け、
前記アシストカウンタ歯車と前記アシスト出力歯車とのギヤ比を前記入力歯車列と前記出力歯車列で得られる変速比のうちの最高速段のギヤ比相当としたことを特徴とする自動変速機。 - 請求項6〜9のいずれか1項における前記アシスト機構を前記カウンタ軸の車体後方側端部に設けたことを特徴とする自動変速機。
- 請求項6〜9のいずれか1項における前記アシスト機構を前記出力軸の中心軸を含む水平面より下方に位置するように設けたことを特徴とする自動変速機。
- 請求項1〜4のいずれか1項における前記アシスト機構は、前記噛み合いクラッチの切り換え指令が出力されると現在締結している噛み合いクラッチが完全に解放される以前に前記出力軸に前記エンジンの動力を伝達し始め、該噛み合いクラッチが完全に解放されたとき前記エンジントルクを前記出力軸に伝達させ、切り換え指令に基づいて前記噛み合いクラッチが締結したときに前記出力軸への動力伝達を解除することを特徴とする自動変速機。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000124011 | 2000-04-25 | ||
| JP2000124011 | 2000-04-25 | ||
| PCT/JP2001/003513 WO2001081788A1 (en) | 2000-04-25 | 2001-04-24 | Automatic transmission |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2001081788A1 JPWO2001081788A1 (ja) | 2004-01-08 |
| JP3906080B2 true JP3906080B2 (ja) | 2007-04-18 |
Family
ID=18634209
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001578840A Expired - Fee Related JP3906080B2 (ja) | 2000-04-25 | 2001-04-24 | 自動変速機 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7222551B2 (ja) |
| EP (1) | EP1277988A1 (ja) |
| JP (1) | JP3906080B2 (ja) |
| WO (1) | WO2001081788A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002031224A (ja) * | 2000-07-17 | 2002-01-31 | Hitachi Ltd | 自動変速機の制御方法、および自動変速機の制御装置 |
| US6976935B2 (en) * | 2002-07-12 | 2005-12-20 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Method and apparatus for operating a motor vehicle |
| JP4200075B2 (ja) * | 2003-10-10 | 2008-12-24 | 株式会社日立製作所 | 自動車の変速方法,自動車の変速装置,自動車用変速機の制御装置,自動車の変速装置のアクチュエータ制御装置 |
| US8393240B2 (en) * | 2009-08-14 | 2013-03-12 | Toyota Motor Engineering & Manufacturing North America, Inc. | Instrumented control pedals for electronically shifted manual transmissions |
| US8843284B2 (en) * | 2009-08-14 | 2014-09-23 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for controlling manual transmissions |
| CN102146988B (zh) * | 2011-03-23 | 2014-02-12 | 昆明理工大学 | 滑动轴键锁齿轮变速器 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3802293A (en) * | 1972-08-28 | 1974-04-09 | Eaton Corp | Power shift |
| JPS58146748A (ja) * | 1982-02-22 | 1983-09-01 | Mazda Motor Corp | 複合クラッチ式多段歯車変速機の変速制御方法 |
| JPS58149449A (ja) * | 1982-03-02 | 1983-09-05 | Toyota Motor Corp | 車両用自動変速機の変速制御方法 |
| DE3602374A1 (de) | 1986-01-28 | 1987-07-30 | Basf Ag | Verfahren zur herstellung von 6-aminocapronsaeure |
| JPS62191947A (ja) | 1986-02-19 | 1987-08-22 | Alps Electric Co Ltd | デイスクキヤツシユ制御処理方式 |
| JPS62190152U (ja) * | 1986-05-26 | 1987-12-03 | ||
| JPS62191947U (ja) * | 1986-05-28 | 1987-12-07 | ||
| JPS632736A (ja) | 1986-06-20 | 1988-01-07 | Toyota Motor Corp | 車両用自動変速装置 |
| JPH01206138A (ja) * | 1988-02-10 | 1989-08-18 | Honda Motor Co Ltd | 自動車用変速機 |
| JP2832277B2 (ja) * | 1989-02-28 | 1998-12-09 | 富士重工業株式会社 | 4輪駆動車のトルク配分制御装置 |
| JPH06330960A (ja) | 1993-05-20 | 1994-11-29 | Hino Motors Ltd | 動力同期装置付変速装置 |
| JP4104091B2 (ja) * | 1996-12-13 | 2008-06-18 | 富士重工業株式会社 | 4輪駆動車用手動変速機 |
| JP3660528B2 (ja) * | 1999-06-07 | 2005-06-15 | 本田技研工業株式会社 | 平行軸式変速機 |
| US6647817B2 (en) * | 2000-02-14 | 2003-11-18 | Fuji Jukogyo Kabushiki Kaisha | Automatic transmission |
| JP2001280175A (ja) * | 2000-03-30 | 2001-10-10 | Hitachi Ltd | 歯車式機構を用いた自動変速機の制御装置及び方法 |
| JP3499190B2 (ja) * | 2000-04-04 | 2004-02-23 | 株式会社日立製作所 | 自動変速機 |
| JP4519296B2 (ja) * | 2000-09-14 | 2010-08-04 | 富士重工業株式会社 | 4輪駆動車のトランスミッション装置 |
| JP3787492B2 (ja) * | 2000-11-29 | 2006-06-21 | 株式会社日立製作所 | 自動変速機制御装置、および方法 |
| JP2002243028A (ja) * | 2001-02-15 | 2002-08-28 | Hitachi Ltd | 自動変速機の制御装置および制御方法 |
-
2001
- 2001-04-24 WO PCT/JP2001/003513 patent/WO2001081788A1/ja not_active Ceased
- 2001-04-24 JP JP2001578840A patent/JP3906080B2/ja not_active Expired - Fee Related
- 2001-04-24 US US10/239,149 patent/US7222551B2/en not_active Expired - Fee Related
- 2001-04-24 EP EP01922049A patent/EP1277988A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| EP1277988A1 (en) | 2003-01-22 |
| JPWO2001081788A1 (ja) | 2004-01-08 |
| WO2001081788A1 (en) | 2001-11-01 |
| US7222551B2 (en) | 2007-05-29 |
| US20030150286A1 (en) | 2003-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3896976B2 (ja) | マニュアルトランスミッションの自動変速制御装置 | |
| US7455619B2 (en) | Control strategy for avoiding tip-in noise in a powershift transmission | |
| JP4333209B2 (ja) | 自動車の制御装置 | |
| JP2004239327A (ja) | 多段式自動変速機の変速制御装置 | |
| US7367917B2 (en) | Shift change control system and automatic transmission system of automobile | |
| US6856880B2 (en) | Automatic shift controller for a vehicle | |
| JP3823960B2 (ja) | 車両の変速装置 | |
| US6907801B2 (en) | Automatic transmission | |
| GB2433301A (en) | A method of controlling a powershift transmission during change-of-mind shifts | |
| JP3906080B2 (ja) | 自動変速機 | |
| JP2005207487A (ja) | 車両用変速機 | |
| CN100487273C (zh) | 汽车的控制装置、控制方法以及自动变速器 | |
| JP2001289289A (ja) | 自動変速機 | |
| JP2009008148A (ja) | 自動車の変速制御方法 | |
| JP4007321B2 (ja) | 自動車の制御装置 | |
| JP2004125114A (ja) | 車両のマニュアル変速装置 | |
| JP4770363B2 (ja) | 複数クラッチ式変速機の制御装置 | |
| JP2009127785A (ja) | 変速機の制御装置 | |
| JP4778208B2 (ja) | 自動変速装置 | |
| JP3544508B2 (ja) | 自動変速機 | |
| JP2005090604A (ja) | 自動変速機の変速制御装置 | |
| JP4197820B2 (ja) | 副変速機を備えた変速機の変速制御装置 | |
| JP2005180628A (ja) | マニュアルトランスミッションの自動変速制御装置 | |
| JP2007010158A (ja) | 車両 | |
| JP2000190756A (ja) | 歯車式変速機の自動変速装置および自動変速制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060320 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070115 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100119 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110119 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110119 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120119 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130119 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |