JP4317032B2 - 車両ロールオーバ検出システム - Google Patents
車両ロールオーバ検出システム Download PDFInfo
- Publication number
- JP4317032B2 JP4317032B2 JP2003583878A JP2003583878A JP4317032B2 JP 4317032 B2 JP4317032 B2 JP 4317032B2 JP 2003583878 A JP2003583878 A JP 2003583878A JP 2003583878 A JP2003583878 A JP 2003583878A JP 4317032 B2 JP4317032 B2 JP 4317032B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- measure
- algorithm
- roll
- occupant
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 129
- 230000001133 acceleration Effects 0.000 claims description 54
- 238000000034 method Methods 0.000 claims description 32
- 230000004044 response Effects 0.000 claims description 20
- 230000008859 change Effects 0.000 claims description 7
- 230000004048 modification Effects 0.000 claims description 3
- 238000012986 modification Methods 0.000 claims description 3
- 230000000007 visual effect Effects 0.000 claims description 3
- 230000005684 electric field Effects 0.000 claims description 2
- 230000003287 optical effect Effects 0.000 claims description 2
- 238000004422 calculation algorithm Methods 0.000 description 250
- 238000012360 testing method Methods 0.000 description 48
- 230000006870 function Effects 0.000 description 46
- 238000012545 processing Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 17
- 238000004364 calculation method Methods 0.000 description 14
- 208000027418 Wounds and injury Diseases 0.000 description 13
- 230000006378 damage Effects 0.000 description 13
- 208000014674 injury Diseases 0.000 description 13
- 230000000875 corresponding effect Effects 0.000 description 11
- 230000000694 effects Effects 0.000 description 9
- 238000005259 measurement Methods 0.000 description 9
- 238000005381 potential energy Methods 0.000 description 9
- 238000013480 data collection Methods 0.000 description 8
- 230000005484 gravity Effects 0.000 description 7
- 238000005070 sampling Methods 0.000 description 7
- 238000013016 damping Methods 0.000 description 6
- 230000010354 integration Effects 0.000 description 6
- 230000004913 activation Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000002411 adverse Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 230000002238 attenuated effect Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000002596 correlated effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000000670 limiting effect Effects 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 238000005293 physical law Methods 0.000 description 2
- 230000008439 repair process Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000005686 electrostatic field Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000005459 micromachining Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R21/0133—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by integrating the amplitude of the input signal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R21/01332—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis
- B60R21/01336—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis using filtering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/01552—Passenger detection systems detecting position of specific human body parts, e.g. face, eyes or hands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R2021/0002—Type of accident
- B60R2021/0018—Roll-over
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R2021/01327—Angular velocity or angular acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/0153—Passenger detection systems using field detection presence sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/04—Control of vehicle driving stability related to roll-over prevention
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Air Bags (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Automotive Seat Belt Assembly (AREA)
Description
図1aを参照すると、車両12にロールオーバ検出システム10が搭載されている。車両12は、局所デカルト座標系で示してあり、X軸は前方を正とした車両の縦方向軸と一致し、またY軸は左方向を正とした車両の横方向軸と、Z軸は上向きを正とした車両の垂直軸と一致している。車両12の質量をMとすると、それに対応する重心CGは、地上からZ0の高さに位置している。図では車両12は、障害物14に向かってY軸負方向に、速度Uでスライドしている。

測度アルゴリズム300.1は、ロールオーバ状態を検出するのに、経験則的な、時間域判別処理を使用しており、通常車両の大きな横方向作用力を伴い、比較的速い頭部接触時間(例えば<250msec)を特徴とする、ほとんどのロールオーバ事象に対して、展開時間を短縮する上で有利である。測度アルゴリズム300.1では、フィルタリングされた
測度アルゴリズム300.1およびエネルギアルゴリズム300.2は、互いに独立であるが両者とも、データ収集および処理アルゴリズム150からのフィルタリングされた共通のデータ、すなわちフィルタリングされた
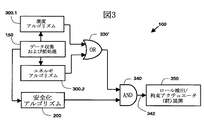
以下に図3〜7に示すフローチャートを参照して、データ収集および処理アルゴリズム150、安全化アルゴリズム200、測度アリゴリズム300.1およびエネルギアルゴリズム300.2について説明する。図6は、測度アルゴリズム300.1およびエネルギアルゴリズム300.2の両方の一般的なアルゴリズム構造のフローチャートを示しており、測度アルゴリズム300.1とエネルギアルゴリズム300.2の個々の詳細は図8a〜8cに表で示してある。アルゴリズムは数学的に記述してあり、応用例に特有の定数についてはパラメータを用いており、これらのパラメータを、特定の種類の車両について例となる数値とあわせて、図9aおよび9bに示してある。これらのパラメータは通常、例えば車両プラットフォームなどの特定の応用例に適合させるものであること、また図9aおよび9bに示すパラメータの具体的な数値は説明のためだけのものであり、本発明の範囲を限定するものと考えるべきではないことはいうまでもない。
測度アルゴリズム300.1、エネルギアルゴリズム300.2、および安全化アルゴリズム200のそれぞれにおいては、対応するセンサオフセット、すなわち
ステップ(400)から、1つ又は複数のセンサが再較正を必要とする場合、ステップ(314)において再較正を必要とする1つまたは複数のセンサが再較正される。例えば、横加速度計18および角速度センサ20の両方が試験可能であり、既知の刺激をセンサに与え、対応するセンサ出力が既知の刺激と一致するように較正することができる。例えば、横加速度計18が、マイクロマシン加工による、スプリング要素の梁で懸架されたマス要素を含むものであれば、マス要素とハウジングの間に静電場を印加して、基準加速度レベルに相当する量だけ梁を撓ませる。
最初に、補償された符号付の角速度値を積分することによって、角度位置θMが以下のように推定される。
それは、計測された横加速度を用いて将来(20〜30ミリ秒後)のロール運動を予測すること、
横加速度に、角速度および全回転角を組み合わせて、開始角度が水平から約20度未満であるロール事象について、車両の初期角度情報を必要とすることなく、現行回転状態および運動と、回転を生成している強制関数との測度を生成すること、
車両特有の動的特性(ロールオーバ試験データから抽出される)に初期の車両応答測定値を組み合わせて利用して、最終的なロールオーバの発生を、そのような事象が明白になる以前に予測すること、である。
図12を参照すると、テストCおよびDについて計算で求めた良度指数を、測度イベント時間ΔtM、すなわち図10の表に示した特定の型式の車両についての実際のスレッド減速テストにおける、測度アルゴリズム300.1の開始からの時間の関数としてプロットしてある。図12には、この特定の形式の車両についての、関連する閾値関数
ステップ(306.2)において、エネルギアルゴリズム300.2の入口基準は、例えば
最初に、角度位置
剛体運動力学に従って、関連する剛体のロール事象と非ロール事象を判別する位相空間内の理論的閾値境界が存在する。例えば、この理論的閾値境界は次式で求められる。
図15を参照すると、上述の移動平均フィルタを用いてフィルタリングした、実際のロールオーバテストデータを、図11aおよび11bに示すテストAおよびBそれぞれについて、図10の条件に従い、関連する理論的な閾値境界の例および実際の区分線形閾値境界の例と共に、ω‐θ位相空間内にプロットしてある。
エネルギ検出基準が、ステップ(330.2)で満足され、かつステップ(340)において、安全化基準が満たされる場合には、ステップ(350)において、関連する1人または複数の乗員への傷害が軽減するために、関連する1つまたは複数の安全拘束アクチュエータ30が展開される。エネルギアルゴリズム300.2の検出基準が満たされるときまでに安全化基準が満たされない場合には、安全化基準が満たされるか、またはステップ(322.2)でエネルギアルゴリズム300.2から出るかのいずれかになるまで、エネルギアルゴリズム300.2が反復されるように、エネルギアルゴリズム300.2の展開決定はラッチされない。
ロールオーバ検出アルゴリズムは、特定の形式の式によって表されていたが、これらの計算は、本願の教示の範囲を逸脱することなく、様々な方法で、特定のプロセッサ26上に実装できることはいうまでもない。例えば、本願に記載の特定の計算を、特定のプロセッサに実際に実装するためには、例えば関連するアナログ/デジタル変換器の解像度や、特定のプロセッサ26によって実行可能な数学処理の形式と精度、また特定のプロセッサ26のワード長などに応じて、修正を必要とする可能性がある。
測度アルゴリズム300.1およびエネルギアルゴリズム300.2は、関連する
左56.1および右56.2の乗員センサの組が、プロセッサ26の1つまたは2つ以上の入力ポートに、例えば単独バス48、多重信号線、または複数の信号ケーブルを介して、動作可能に接続されている。例えば、図17は、左60.1および右60.2両方の第1の乗員センサ、例えば頭上に設置された視覚センサ、ならびに左62.1および右61.2の第2の乗員センサ、例えば、関連する左64.1および右64.2のドア内に設置された容量性センサを含む、実施態様を示している。各乗員着座場所は、それと関連する2つの異なる乗員センサを有するように示してあるが、乗員センサの特定の数は、限定的なものではない。例えば、別の実施態様においては、検知しようとする各着座場所に、1つだけの乗員センサ56.1、56.2があっても、または任意の1つの着座場所に関連して3つ以上の乗員センサがあってもよい。
特定の実施態様について詳細を説明したが、当業者であれば、本開示の全般的な教示を参考として、これらの詳細に対する、様々な修正態様および代替手法を開発することが可能であることを理解するであろう。したがって、開示した特定の配設は、説明だけを目的とするものであり、本発明の範囲を限定するものではなく、本発明は添付の特許請求の範囲およびそのすべての均等物の全範囲を授与されるべきである。
Claims (23)
- a.車両に動作可能に結合されて、車両のロール軸回りのロール速度を計測するように適合されたロール角速度センサであって、前記ロール軸が車両の縦方向軸と実質的に一致している前記ロール角速度センサ;
b.車両内の乗員の存在または位置に応答して、車両の内部境界に対する近接度または位置の測度を提供する乗員センサ;および
c.前記ロール角速度センサと前記乗員センサとに動作可能に結合されて、前記ロール角速度センサからの信号に応答する予測ロールオーバ状態の検出に応答して、安全拘束システムを制御するための信号を生成するように適合されたプロセッサであって、前記乗員センサからの信号に応答して、前記安全拘束システムを制御するための前記信号に関連する検出基準を修正するように適合された前記プロセッサを含む、車両のロールオーバ状態を検出するシステム。 - 乗員センサが、乗員の頭部の位置に応答する、請求項1に記載の車両のロールオーバ状態を検出するシステム。
- 乗員センサが、乗員の胴部の位置に応答する、請求項1に記載の車両のロールオーバ状態を検出するシステム。
- 乗員センサが、容量性センサ、能動式赤外線センサ、受動式赤外線センサ、視覚センサ、レーザーセンサ、光学センサ、レーダーセンサ、マイクロ波センサ、音波センサ、多点シート重量分布センサ、および電界センサから選択される少なくとも1つのセンサを含む、請求項1に記載の車両のロールオーバ状態を検出するシステム。
- プロセッサが、ロール角速度センサからの信号を積分することによってロール角の測度を特定するように適合されているとともに、安全拘束システムを制御するための信号が、前記ロール角の測度にさらに応答する、請求項1に記載の車両のロールオーバ状態を検出するシステム。
- 車両に動作可能に結合されて、実質的に横方向の車両の加速度を計測するように適合された加速度計をさらに含むとともに、安全拘束システムを制御するための信号が、前記加速度計からの信号にさらに応答する、請求項1に記載の車両のロールオーバ状態を検出するシステム。
- 車両のロールオーバ状態の検出を可能にする方法であって、
a.車両の縦方向軸と実質的に一致するロール軸の回りの、車両のロール角速度の測度の取得を可能にすること;
b.車両内における乗員位置の測度の取得を可能にすること;および
c.安全拘束システムを制御するための信号の生成を可能にすることを含み、前記安全拘束システムを制御するための信号が、前記ロール角速度の測度とともに検出基準に応答性を有し、該検出基準が、前記乗員位置の測度に応答する、前記方法。 - 検出基準に関連する展開閾値を、乗員位置の測度に応答するオフセットによって変化させる、請求項7に記載の車両のロールオーバ状態の検出を可能にする方法。
- 検出基準に関連する展開閾値を、乗員位置の測度に応答する係数によって倍率変更する、請求項7に記載の車両のロールオーバ状態の検出を可能にする方法。
- 検出基準に関連する展開閾値が、乗員位置の測度の変化速度に応答する、請求項7に記載の車両のロールオーバ状態の検出を可能にする方法。
- a.ロール角速度の測度からロール角の測度の特定または取得を可能にすること;
b.前記ロール角速度の測度と前記ロール角の測度との位相空間における閾値関数の特定を可能にすること;
c.乗員位置の測度に応じて前記閾値関数の修正を可能にすること;および
d.前記ロール角速度の測度と前記ロール角の測度との組み合わせを含む位相空間内の測度と、前記閾値関数との比較を可能にすることをさらに含み、安全拘束システムを制御するための信号が、前記位相空間内の測度と前記閾値関数とを比較する操作に応答する、請求項7に記載の車両のロールオーバ状態の検出を可能にする方法。 - 閾値関数が、位相空間内の関数、位相空間内の区分性関数、または位相空間内のテーブル参照のいずれかを含む、請求項11に記載の車両のロールオーバ状態の検出を可能にする方法。
- 閾値関数を修正する操作が、乗員位置の測度に応答してロール角速度オフセットを特定すること、および前記閾値関数から前記ロール角速度オフセットを減じることを含む、請求項11に記載の車両のロールオーバ状態の検出を可能にする方法。
- 安全拘束システムを制御するための信号の生成を可能にする操作が、
a.車両の横加速度の測度の取得を可能にすること;
b.前記横加速度の測度とロール角速度の測度とに応答して良度指数の特定を可能にすること;
c.乗員位置の測度に応答して良度指数閾値の特定を可能にすること;および
d.前記良度指数と前記良度指数閾値とを比較することによるロールオーバ状態の検出を可能にすることを含む、請求項7に記載の車両のロールオーバ状態の検出を可能にする方法。 - a,少なくとも乗員の一部分が車両の内部部分と接触する、接触時間を推定すること;
b.前記接触時間を、安全拘束システムを乗員と相互作用する以前に展開するのに必要な時間間隔に対応する第1の閾値と比較すること;および
c.前記接触時間と前記第1の閾値を比較する操作に応答して、前記安全拘束システムを制御するための信号を適合させることをさらに含む、請求項7に記載の車両のロールオーバ状態の検出を可能にする方法。 - 接触時間を推定する操作が、車両に対する乗員の速度を推定または計測することを含む、請求項15に記載の車両のロールオーバ状態の検出を可能にする方法。
- 異なる時間における乗員位置の測度を記憶することをさらに含むとともに、接触時間を推定する操作が、車両に対する乗員の加速度を推定または計測することを含む、請求項15に記載の車両のロールオーバ状態の検出を可能にする方法。
- 接触時間を推定する操作が、それぞれ異なる時間における、乗員位置の複数の測度に応答する、請求項15に記載の車両のロールオーバ状態の検出を可能にする方法。
- 接触時間が第1の閾値よりも小さい場合には、安全拘束システムを制御するための信号を修正することをさらに含む、請求項15に記載の車両のロールオーバ状態の検出を可能にする方法。
- 安全拘束システムを制御するための信号を修正する操作が、そうでない場合には予想ロールオーバ状態の検出に応答して実施するよりも早く、前記安全拘束システムを展開させることを含む、請求項19に記載の車両のロールオーバ状態の検出を可能にする方法。
- 安全拘束システムを制御するための信号を修正する操作が、前記安全拘束システムの展開を禁止することを含む、請求項19に記載の車両のロールオーバ状態の検出を可能にする方法。
- 安全拘束システムを制御するための信号を修正する操作が、前記安全拘束システムの展開を遅延させることを含む、請求項15に記載の車両のロールオーバ状態の検出を可能にする方法。
- 安全拘束システムの展開を遅延させる操作が、接触時間と第1の閾値との差が、第2の閾値より小さくなるまで、前記展開を遅延させることを含む、請求項22に記載の車両のロールオーバ状態の検出を可能にする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US36614902P | 2002-03-19 | 2002-03-19 | |
| PCT/US2003/008319 WO2003081179A2 (en) | 2002-03-19 | 2003-03-19 | Vehicle rollover detection system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006501092A JP2006501092A (ja) | 2006-01-12 |
| JP4317032B2 true JP4317032B2 (ja) | 2009-08-19 |
Family
ID=28454759
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003583878A Expired - Fee Related JP4317032B2 (ja) | 2002-03-19 | 2003-03-19 | 車両ロールオーバ検出システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7698036B2 (ja) |
| EP (1) | EP1585940A4 (ja) |
| JP (1) | JP4317032B2 (ja) |
| CN (1) | CN101115646B (ja) |
| AU (1) | AU2003214228A1 (ja) |
| WO (1) | WO2003081179A2 (ja) |
Families Citing this family (79)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI113309B (fi) * | 2001-06-29 | 2004-03-31 | Abb Oy | Verkkokatkoshidastus |
| DE10245781A1 (de) * | 2002-10-01 | 2004-04-15 | Robert Bosch Gmbh | Verfahren zur Auslösung eines Rückhaltesystems in einem Fahrzeug |
| JP3890477B2 (ja) * | 2003-06-12 | 2007-03-07 | 日産自動車株式会社 | 車輌の横転判定方法及び車輌の横転判定装置 |
| JP2005206099A (ja) * | 2004-01-26 | 2005-08-04 | Calsonic Kansei Corp | 車両挙動判定システムおよび乗員保護システム |
| JP2007532371A (ja) * | 2004-03-23 | 2007-11-15 | ケルシ・ヘイズ、カムパニ | 車両転覆軽減の方法および装置 |
| DE102004016185A1 (de) * | 2004-04-01 | 2005-10-20 | Volkswagen Ag | Verfahren zum Herstellen eines Bauteils für ein Kraftfahrzeug |
| DE102004029064B3 (de) * | 2004-06-16 | 2006-03-30 | Siemens Ag | Verfahren und Vorrichtung zum Erkennen einer Überschlagssituation bei einem Kraftfahrzeug |
| DE102004029817A1 (de) * | 2004-06-19 | 2006-01-05 | Robert Bosch Gmbh | Sicherheitssystem für Fahrzeuginsassen |
| US7412314B2 (en) * | 2004-09-14 | 2008-08-12 | Delphi Technologies, Inc. | Soil trip vehicle rollover detection method |
| DE102004045890A1 (de) * | 2004-09-22 | 2006-03-23 | Conti Temic Microelectronic Gmbh | Verfahren und Vorrichtung zum Einstellen des Ruhewerts eines einfachen Beschleunigungssensors zum Messen einer Beschleunigung eines Fahrzeugs in Richtung seiner Hochachse |
| JP2006103568A (ja) * | 2004-10-07 | 2006-04-20 | Calsonic Kansei Corp | 乗員保護装置のゼロ点ドリフト検出手段及びこれを備えた乗員保護装置 |
| JP4795706B2 (ja) * | 2004-10-07 | 2011-10-19 | カルソニックカンセイ株式会社 | 乗員保護装置 |
| EP1863677A4 (en) * | 2004-10-19 | 2008-10-22 | Indiana Mills & Mfg | VEHICLE SAFETY SEAT |
| JP4552612B2 (ja) * | 2004-11-18 | 2010-09-29 | 日産自動車株式会社 | 車体上部構造および車両のロールオーバー時の接地箇所検出方法 |
| JP4552614B2 (ja) * | 2004-11-18 | 2010-09-29 | 日産自動車株式会社 | 車両衝突箇所判断装置および車両衝突箇所判断方法 |
| JP4586505B2 (ja) * | 2004-11-18 | 2010-11-24 | 日産自動車株式会社 | 車両衝突状態判断装置 |
| JP4552613B2 (ja) * | 2004-11-18 | 2010-09-29 | 日産自動車株式会社 | ロールオーバー時の接地箇所判定装置および接地箇所判定方法 |
| JP2006176084A (ja) * | 2004-12-24 | 2006-07-06 | Advics:Kk | 車両挙動センサの検出値補正方法 |
| US20060184300A1 (en) * | 2005-02-11 | 2006-08-17 | Schubert Peter J | Vehicle rollover detection method based on differential z-axis acceleration |
| GB2424983A (en) * | 2005-04-07 | 2006-10-11 | Autoliv Dev | Seatbelt pretensioner control system |
| US7734394B2 (en) * | 2005-04-25 | 2010-06-08 | Robert Bosch Gmbh | System and method for sensing soil-and curb-tripped rollover events |
| JP2006306223A (ja) * | 2005-04-27 | 2006-11-09 | Toyota Motor Corp | ロールオーバ判定装置 |
| US20070058862A1 (en) * | 2005-09-09 | 2007-03-15 | Meier Michael R | Histogram equalization method for a vision-based occupant sensing system |
| JP4779879B2 (ja) * | 2005-11-11 | 2011-09-28 | 日産自動車株式会社 | 車両横転時の乗員保護装置および乗員保護方法 |
| US7805231B2 (en) * | 2006-06-29 | 2010-09-28 | Delphi Technologies, Inc. | Integrated vehicle crash sensing system and method |
| US7922196B2 (en) * | 2007-06-11 | 2011-04-12 | Ford Global Technologies, Llc | Sensor integration for airbag deployment |
| DE102007051213A1 (de) * | 2007-10-26 | 2009-04-30 | Volkswagen Ag | Verfahren oder Regelungssystemkomponente zur Ermittlung der Energiezustände eines bewegten Körpers insbesondere eines Fahrzeugs |
| US7996132B2 (en) * | 2007-11-29 | 2011-08-09 | Robert Bosch Gmbh | Fast sensing system and method for soil- and curb-tripped vehicle rollovers |
| DE102008010560B4 (de) * | 2008-02-22 | 2016-09-22 | Robert Bosch Gmbh | Verfahren und Steuergerät zur Ansteuerung von Personenschutzmitteln für ein Fahrzeug |
| DE102008001215A1 (de) * | 2008-04-16 | 2009-10-22 | Robert Bosch Gmbh | Verfahren und Steuergerät zur Ansteuerung von zumindest einem Sicherheitsmittel |
| US9004992B2 (en) * | 2008-10-10 | 2015-04-14 | Convoy Solutions Llc | Apparatus to monitor a parked vehicle at a convenience station |
| US8437912B2 (en) * | 2009-05-06 | 2013-05-07 | Gerald Frank Simons | Hydraulic propulsion, gyroscopic energy storage vehicle drive system |
| US20120239247A1 (en) * | 2011-03-16 | 2012-09-20 | General Dynamics Land Systems, Inc. | Systems and methods for active mitigation of sudden accelerative forces in vehicles |
| US8688380B2 (en) | 2012-04-23 | 2014-04-01 | Geotab Inc. | Even driven data acquisition switch |
| US9121866B2 (en) | 2013-03-15 | 2015-09-01 | Autoliv Asp, Inc. | System and method for inertial sensor offset compensation |
| US9283825B2 (en) | 2014-02-25 | 2016-03-15 | Isam Mousa | System, method, and apparatus to prevent commercial vehicle rollover |
| JP6391945B2 (ja) * | 2014-03-05 | 2018-09-19 | 国立大学法人東京海洋大学 | 横転危険警告装置 |
| US11669090B2 (en) | 2014-05-20 | 2023-06-06 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation feature monitoring and evaluation of effectiveness |
| US10354330B1 (en) * | 2014-05-20 | 2019-07-16 | State Farm Mutual Automobile Insurance Company | Autonomous feature use monitoring and insurance pricing |
| US10373259B1 (en) | 2014-05-20 | 2019-08-06 | State Farm Mutual Automobile Insurance Company | Fully autonomous vehicle insurance pricing |
| US9972054B1 (en) | 2014-05-20 | 2018-05-15 | State Farm Mutual Automobile Insurance Company | Accident fault determination for autonomous vehicles |
| US10599155B1 (en) | 2014-05-20 | 2020-03-24 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation feature monitoring and evaluation of effectiveness |
| US9786154B1 (en) | 2014-07-21 | 2017-10-10 | State Farm Mutual Automobile Insurance Company | Methods of facilitating emergency assistance |
| US9914392B2 (en) * | 2014-10-30 | 2018-03-13 | Cross Road Centers, Llc | Methods, apparatuses, and systems for monitoring state of a transportation system |
| US11618376B2 (en) | 2014-10-30 | 2023-04-04 | Crc R&D, Llc | Methods, apparatuses, and systems for monitoring state of a transportation system |
| US10241509B1 (en) | 2014-11-13 | 2019-03-26 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle control assessment and selection |
| EP3072846A1 (en) * | 2015-03-25 | 2016-09-28 | DANA ITALIA S.p.A | System and method for detecting an impending tip over of a vehicle |
| US11107365B1 (en) | 2015-08-28 | 2021-08-31 | State Farm Mutual Automobile Insurance Company | Vehicular driver evaluation |
| CN105172733B (zh) * | 2015-09-18 | 2017-11-03 | 智车优行科技(北京)有限公司 | 车辆安全保护控制装置及方法 |
| CN105292085B (zh) * | 2015-11-02 | 2018-05-04 | 清华大学苏州汽车研究院(吴江) | 一种基于红外激光辅助的车辆前向避撞系统 |
| US10241215B2 (en) * | 2015-11-19 | 2019-03-26 | Agjunction Llc | Sensor alignment calibration |
| GB2545713B (en) * | 2015-12-23 | 2019-01-09 | Jaguar Land Rover Ltd | Improvements to vehicle handling |
| CN106931992B (zh) * | 2015-12-29 | 2022-05-03 | 博世(中国)投资有限公司 | 用于检测物体翻滚的方法和装置 |
| US10134278B1 (en) | 2016-01-22 | 2018-11-20 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle application |
| US10503168B1 (en) | 2016-01-22 | 2019-12-10 | State Farm Mutual Automotive Insurance Company | Autonomous vehicle retrieval |
| US11242051B1 (en) | 2016-01-22 | 2022-02-08 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle action communications |
| US10395332B1 (en) | 2016-01-22 | 2019-08-27 | State Farm Mutual Automobile Insurance Company | Coordinated autonomous vehicle automatic area scanning |
| US10324463B1 (en) | 2016-01-22 | 2019-06-18 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation adjustment based upon route |
| US11441916B1 (en) | 2016-01-22 | 2022-09-13 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle trip routing |
| US11719545B2 (en) | 2016-01-22 | 2023-08-08 | Hyundai Motor Company | Autonomous vehicle component damage and salvage assessment |
| CN106004762B (zh) * | 2016-05-31 | 2018-05-18 | 东莞市天佑运输服务有限公司 | 基于红外感应的车辆防侧翻系统的控制方法 |
| CN105946775B (zh) * | 2016-05-31 | 2017-11-24 | 嵊州北航投星空众创科技有限公司 | 基于红外感应的车辆防侧翻系统 |
| US9791279B1 (en) * | 2016-06-30 | 2017-10-17 | U-Blox Ag | System for and method of determining angular position of a vehicle |
| DE102016213071B4 (de) * | 2016-07-18 | 2024-10-02 | Robert Bosch Gmbh | Voranstoßendes System und zugehöriges Insassenschutzsystem für ein Fahrzeug |
| US10286867B2 (en) * | 2017-06-26 | 2019-05-14 | Trw Automotive U.S. Llc | System for sensing vehicle conditions |
| KR20190074502A (ko) * | 2017-12-20 | 2019-06-28 | 현대자동차주식회사 | 차량용 능동형 안전벨트 제어 장치 및 방법 |
| CN110304589B (zh) * | 2018-08-01 | 2021-09-24 | 林德(中国)叉车有限公司 | 限高判定方法以及系统 |
| US20200094761A1 (en) * | 2018-09-24 | 2020-03-26 | Novelic D.O.O. | Seat occupation, vital signs and safety belt lock sensor system for rear vehicle seats without power supply |
| CN111476977A (zh) * | 2019-01-23 | 2020-07-31 | 上海博泰悦臻电子设备制造有限公司 | 安全驾驶预警系统 |
| CN110667568B (zh) * | 2019-09-24 | 2021-11-30 | 江苏徐工工程机械研究院有限公司 | 一种翻车警报系统、翻车风险预测方法及翻车警报方法 |
| US11485309B2 (en) * | 2019-12-10 | 2022-11-01 | Indiana Mills & Manufacturing, Inc. | Deployable restraint barricade for a motor vehicle |
| US11505149B2 (en) * | 2020-03-12 | 2022-11-22 | Zf Friedrichshafen Ag | Method and apparatus for controlling an actuatable protection device with enhanced rollover discrimination |
| US11550337B2 (en) | 2020-06-16 | 2023-01-10 | Geotab Inc. | Data capture trigger configuration for asset tracking |
| US11640577B2 (en) | 2020-06-16 | 2023-05-02 | Geotab Inc. | Data capture instructions for asset tracking |
| CN112870614A (zh) * | 2021-01-08 | 2021-06-01 | 浙江华消科技有限公司 | 机器人的控制方法、机器人和存储介质 |
| US12005852B2 (en) | 2021-10-05 | 2024-06-11 | Indiana Mills & Manufacturing, Inc. | Restraint system including a resettable web tensioning device |
| GB2618369B (en) * | 2022-05-05 | 2024-09-11 | Jaguar Land Rover Ltd | Suspension system with hold control |
| CN116147666B (zh) * | 2023-04-04 | 2023-06-23 | 中国船舶集团有限公司第七〇七研究所 | 一种基于角位置测试高精度光学陀螺长航性能的方法 |
| CN117492476B (zh) * | 2024-01-03 | 2024-03-19 | 四川公路桥梁建设集团有限公司 | 一种运梁炮车自动化调姿系统和方法 |
Family Cites Families (113)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1902944C3 (de) * | 1969-01-22 | 1978-10-12 | Dr.Ing.H.C. F. Porsche Ag, 7000 Stuttgart | Steuereinrichtung zum Vermeiden von Kurvenschleudern bei Kraftfahrzeugen |
| DE2023859C3 (de) | 1970-05-15 | 1978-10-19 | Daimler-Benz Ag, 7000 Stuttgart | Blockiervorrichtung für einen Kraftfahrzeugtürverschluß |
| US3899028A (en) * | 1972-03-30 | 1975-08-12 | Systron Donner Corp | Angular position sensing and control system, apparatus and method |
| US4038876A (en) * | 1976-03-04 | 1977-08-02 | Systron Donner Corporation | Acceleration error compensated attitude sensing and control apparatus and method |
| US4470124A (en) * | 1981-06-01 | 1984-09-04 | Honda Giken Kogyo Kabushiki Kaisha | Method of adjusting the zero-point of rate type sensor |
| US4592565A (en) * | 1984-10-17 | 1986-06-03 | Leo Eagle | Apparatus for detecting an overturning moment in a moving vehicle, and jackknifing in a trailer-truck combination |
| US4691798A (en) * | 1985-10-10 | 1987-09-08 | Engelbach Thomas S | System for automatically preventing turnover of two wheeled vehicles |
| DE3914053A1 (de) * | 1989-04-28 | 1990-10-31 | Bayerische Motoren Werke Ag | Steuervorrichtung fuer eine insassen-sicherheitsvorrichtung von kraftfahrzeugen |
| US5074583A (en) * | 1988-07-29 | 1991-12-24 | Mazda Motor Corporation | Air bag system for automobile |
| JPH0291513A (ja) * | 1988-09-28 | 1990-03-30 | Sumitomo Electric Ind Ltd | ジャイロの零点補正方法及びその装置 |
| JP2669889B2 (ja) * | 1989-04-07 | 1997-10-29 | 住友電気工業株式会社 | 自立航法装置に用いる角速度センサの較正装置 |
| US5172323A (en) * | 1989-06-22 | 1992-12-15 | The United States Of America As Represented By The Secretary Of The Navy | Apparatus for determining the attitude of a vehicle |
| DE3921250A1 (de) * | 1989-06-29 | 1991-01-03 | Bosch Gmbh Robert | Insassen-sicherheitssystem und verfahren zum betreiben desselben |
| US5071160A (en) * | 1989-10-02 | 1991-12-10 | Automotive Systems Laboratory, Inc. | Passenger out-of-position sensor |
| US5268021A (en) * | 1989-11-20 | 1993-12-07 | Dynotec Corporation | Fluid fractionator |
| JPH03227745A (ja) * | 1989-12-25 | 1991-10-08 | Mazda Motor Corp | 乗員の姿勢制御装置 |
| DE4005598C2 (de) * | 1990-02-22 | 2000-06-15 | Bosch Gmbh Robert | Schutzverfahren für Fahrzeuginsassen und Einrichtung zur Durchführung des Verfahrens |
| DE4121548C2 (de) * | 1990-06-29 | 1996-03-07 | Mazda Motor | Vorrichtung zum Schutz eines auf dem Rücksitz eines Kraftfahrzeugs befindlichen Insassen vor einem Kopfaufprall |
| US5233213A (en) * | 1990-07-14 | 1993-08-03 | Robert Bosch Gmbh | Silicon-mass angular acceleration sensor |
| JP2874348B2 (ja) * | 1991-01-10 | 1999-03-24 | 住友電気工業株式会社 | ジャイロのバイアス補正装置 |
| JPH05170120A (ja) * | 1991-03-20 | 1993-07-09 | Hitachi Ltd | 車両のヨー運動量検出装置及びその方法、並びにこれを利用した車両の運動制御装置 |
| JPH0798137B2 (ja) | 1991-04-24 | 1995-10-25 | 新日本製鐵株式会社 | ポリイミド気体分離膜 |
| US5508918A (en) * | 1991-06-04 | 1996-04-16 | Automotive Systems Laboratory, Inc. | Predictor/check crash discriminator |
| US5363302A (en) * | 1991-06-04 | 1994-11-08 | Automotive Systems Laboratory, Inc. | Power rate system and method for actuating vehicle safety device |
| US6484080B2 (en) * | 1995-06-07 | 2002-11-19 | Automotive Technologies International Inc. | Method and apparatus for controlling a vehicular component |
| US5684701A (en) * | 1995-06-07 | 1997-11-04 | Automotive Technologies International, Inc. | Method and apparatus for sensing a vehicle crash |
| US5337238A (en) * | 1991-10-08 | 1994-08-09 | Automotive Systems Laboratory, Inc. | System and method for actuating vehicle safety device using damped measures |
| US5218771A (en) * | 1992-04-15 | 1993-06-15 | Redford Peter M | Orientation sensing apparatus |
| DE4212421A1 (de) * | 1992-04-14 | 1993-10-28 | Bosch Gmbh Robert | Verfahren und Einrichtung zum Schutz von Fahrzeuginsassen |
| US6648367B2 (en) | 1995-06-07 | 2003-11-18 | Automotive Technologies International Inc. | Integrated occupant protection system |
| JPH05312579A (ja) * | 1992-05-08 | 1993-11-22 | Murata Mfg Co Ltd | ジャイロコンパス |
| US5742916A (en) * | 1992-12-23 | 1998-04-21 | Siemens Aktiengesellschaft | Process and circuit for controlling the control unit of a system for protecting vehicle occupants |
| US6259982B1 (en) * | 1993-02-02 | 2001-07-10 | Trw Inc. | Method and apparatus for controlling an active suspension system |
| US5366241A (en) * | 1993-09-30 | 1994-11-22 | Kithil Philip W | Automobile air bag system |
| US5413378A (en) * | 1993-12-02 | 1995-05-09 | Trw Vehicle Safety Systems Inc. | Method and apparatus for controlling an actuatable restraining device in response to discrete control zones |
| US5573269A (en) * | 1993-12-02 | 1996-11-12 | Trw Vehicle Safety Systems Inc. | Apparatus and method for sensing and restraining an occupant of a vehicle seat |
| US5626359A (en) * | 1993-12-02 | 1997-05-06 | Trw Vehicle Safety Systems, Inc. | Method and apparatus for controlling an actuatable restraining device in response to discrete control zones |
| US6918459B2 (en) | 1994-05-23 | 2005-07-19 | Automotive Technologies International, Inc. | Method and apparatus for deploying airbags |
| JPH07324941A (ja) * | 1994-06-02 | 1995-12-12 | Matsushita Electric Ind Co Ltd | オフセットドリフト補正装置 |
| US5451094A (en) * | 1994-06-27 | 1995-09-19 | Indiana Mills & Manufacturing, Inc. | Seat and occupant restraint system |
| EP0693690B1 (en) * | 1994-06-29 | 1999-04-28 | New Sd, Inc. | Accelerometer and method of manufacture |
| US5610575A (en) * | 1994-08-25 | 1997-03-11 | Automotive Systems Laboratory, Inc. | Method and system for detecting vehicle roll-over |
| US5802479A (en) * | 1994-09-23 | 1998-09-01 | Advanced Safety Concepts, Inc. | Motor vehicle occupant sensing systems |
| US5602734A (en) * | 1994-09-23 | 1997-02-11 | Advanced Safety Concepts, Inc. | Automobile air bag systems |
| US5646454A (en) * | 1994-09-24 | 1997-07-08 | Robert Bosch Gmbh | Electronic safety device for vehicle occupants including a memory device for storing fault conditions and associated control commands |
| US5670853A (en) * | 1994-12-06 | 1997-09-23 | Trw Vehicle Safety Systems Inc. | Method and apparatus for controlling vehicle occupant position |
| US5492368A (en) * | 1995-02-23 | 1996-02-20 | General Motors Corporation | Rollover seat system |
| US5796002A (en) * | 1995-06-07 | 1998-08-18 | Bei-Systron Donner | Rotation rate sensor with optical sensing device |
| US6095554A (en) * | 1995-06-15 | 2000-08-01 | Trw Inc. | Method and apparatus for sensing side impact crash conditions with an enhanced safing function |
| US5590736A (en) * | 1995-09-08 | 1997-01-07 | Gt Development Corporation | Vehicle pneumatic seat rollover safety vent valve |
| US5684336A (en) * | 1996-03-04 | 1997-11-04 | Trw Inc. | Crash sensor assembly including both an inertia sensor and an accelerometer and method |
| EP0883527B1 (de) * | 1996-03-08 | 1999-10-13 | Siemens Aktiengesellschaft | Anordnung zum steuern eines rückhaltemoduls, insbesondere für ein kraftfahrzeug |
| DE19609176A1 (de) * | 1996-03-11 | 1997-09-18 | Bosch Gmbh Robert | Verfahren und Anordnung zum Erkennen eines Fahrzeug-Überschlags |
| DE19609717A1 (de) * | 1996-03-13 | 1997-09-18 | Bosch Gmbh Robert | Anordnung zum Erkennen von Überrollvorgängen bei Fahrzeugen |
| EP0907526A4 (en) * | 1996-06-24 | 2001-01-03 | Breed Automotive Tech | CONTROL UNIT FOR VEHICLE SECURITY DEVICE |
| DE19632836C1 (de) | 1996-08-14 | 1997-11-20 | Siemens Ag | Anordnung zum Auslösen von Rückhaltemitteln in einem Kraftfahrzeug |
| US5948027A (en) * | 1996-09-06 | 1999-09-07 | Ford Global Technologies, Inc. | Method for enhancing vehicle stability |
| US5864768A (en) * | 1996-09-09 | 1999-01-26 | Ford Global Technologies, Inc. | Vehicle suspension control system |
| DE19647660B4 (de) * | 1996-11-19 | 2005-09-01 | Daimlerchrysler Ag | Auslösevorrichtung für Insassenrückhaltesysteme in einem Fahrzeug |
| DE19651123C1 (de) * | 1996-12-09 | 1998-06-18 | Siemens Ag | Steuervorrichtung in einem Kraftfahrzeug |
| US5825284A (en) * | 1996-12-10 | 1998-10-20 | Rollover Operations, Llc | System and method for the detection of vehicle rollover conditions |
| JP3180713B2 (ja) * | 1997-04-24 | 2001-06-25 | トヨタ自動車株式会社 | 乗員頭部保護装置の制御システム |
| US6070681A (en) * | 1997-06-13 | 2000-06-06 | Lord Corporation | Controllable cab suspension |
| JPH115419A (ja) * | 1997-06-18 | 1999-01-12 | Toyota Autom Loom Works Ltd | 産業車両の車体揺動制御装置 |
| US6065558A (en) * | 1997-07-01 | 2000-05-23 | Dynamotive, L.L.C. | Anti-rollover brake system |
| DE19736328A1 (de) * | 1997-08-21 | 1999-02-25 | Bayerische Motoren Werke Ag | Einrichtung und Verfahren zur Steuerung von Unfallschutz-Auslöseeinrichtungen in Kraftfahrzeugen |
| US6018693A (en) * | 1997-09-16 | 2000-01-25 | Trw Inc. | Occupant restraint system and control method with variable occupant position boundary |
| US6311112B1 (en) * | 1997-12-19 | 2001-10-30 | Trw Inc. | Occupant restraint system and method having smart process initiation control |
| US6076027A (en) * | 1998-02-03 | 2000-06-13 | Raad; Joseph Michael | Method of controlling a vehicle active tilt control system |
| US5948028A (en) * | 1998-02-03 | 1999-09-07 | Ford Global Technologies, Inc. | Method of improving response time in a vehicle active tilt control system |
| US6002975A (en) * | 1998-02-06 | 1999-12-14 | Delco Electronics Corporation | Vehicle rollover sensing |
| US6038495A (en) * | 1998-02-06 | 2000-03-14 | Delco Electronics Corporation | Vehicle rollover sensing using short-term integration |
| US6002974A (en) * | 1998-02-06 | 1999-12-14 | Delco Electronics Corporation | Vehicle rollover sensing using extended kalman filter |
| GB2335522B (en) | 1998-03-17 | 2002-06-05 | Autoliv Dev | Improvements in or relating to a safety arrangement |
| DE19814154A1 (de) * | 1998-03-30 | 1999-10-14 | Siemens Ag | Vorrichtung und Verfahren zur Auslösung eines Insassenschutzsystems bei einem Kraftfahrzeugüberschlag |
| DE19823093C2 (de) * | 1998-05-22 | 2000-06-08 | Daimler Chrysler Ag | Vorrichtung zur Bestimmung von fahrzeugspezifischen Größen eines Fahrzeuges während der Fahrt |
| JP3252797B2 (ja) * | 1998-06-19 | 2002-02-04 | トヨタ自動車株式会社 | ロールオーバー判別方法 |
| US6186539B1 (en) * | 1998-07-01 | 2001-02-13 | Trw Inc. | Method and apparatus for controlling an actuatable restraint device using crash severity indexing and crush zone sensor |
| US6036225A (en) * | 1998-07-01 | 2000-03-14 | Trw Inc. | Method and apparatus for controlling an actuatable restraint device using crash severity indexing |
| US6264212B1 (en) * | 1998-08-20 | 2001-07-24 | Technology Investments Limited | Vehicle suspension system |
| JP3347071B2 (ja) * | 1998-09-10 | 2002-11-20 | 日本電気株式会社 | 乗員検知システム |
| US6225894B1 (en) * | 1998-09-24 | 2001-05-01 | Meritor Heavy Vehicle Systems, Llc | Roll-over detector for vehicles |
| US6292759B1 (en) * | 1998-11-19 | 2001-09-18 | Delphi Technologies, Inc. | Vehicle attitude angle estimation using sensed signal blending |
| US6212455B1 (en) * | 1998-12-03 | 2001-04-03 | Indiana Mills & Manufacturing, Inc. | Roll sensor system for a vehicle |
| US6213512B1 (en) * | 1998-12-14 | 2001-04-10 | Trw Inc. | Seat belt tightening apparatus |
| US6199902B1 (en) * | 1999-02-12 | 2001-03-13 | Trw Inc. | Apparatus and method for discerning at least one occupant characteristic via absorption of an energy signal |
| EP1031469B1 (de) * | 1999-02-25 | 2003-12-17 | Siemens Aktiengesellschaft | Vorrichtung und Verfahren zum Erfassen eines Objektes oder einer Person im Innenraum eines Fahrzeugs |
| US6170594B1 (en) * | 1999-06-01 | 2001-01-09 | Micky G. Gilbert | Method and apparatus for reducing vehicle rollover |
| US6438463B1 (en) | 1999-09-06 | 2002-08-20 | Honda Giken Kogyo Kabushiki Kaisha | Process for determining lateral overturning of vehicle, and system for detecting inclination angle of vehicle body |
| US6305711B1 (en) * | 1999-11-03 | 2001-10-23 | Trw Vehicle Safety Systems Inc. | Vehicle safety apparatus including movable inflatable occupant protection device |
| US6301536B1 (en) * | 1999-11-18 | 2001-10-09 | Visteon Global Technologies, Inc. | Method and apparatus for detecting a vehicle rollover |
| US6262658B1 (en) * | 1999-12-17 | 2001-07-17 | Intel Corporation | Tipping indicator |
| US6332104B1 (en) | 1999-12-21 | 2001-12-18 | Ford Global Technologies, Inc. | Roll over detection for an automotive vehicle |
| US6263261B1 (en) * | 1999-12-21 | 2001-07-17 | Ford Global Technologies, Inc. | Roll over stability control for an automotive vehicle |
| US6341252B1 (en) | 1999-12-21 | 2002-01-22 | Trw Inc. | Method and apparatus for controlling an actuatable occupant protection device |
| US6302439B1 (en) * | 2000-02-01 | 2001-10-16 | Trw Inc. | Distributed occupant protection system and method with cooperative central and distributed protection module actuation control |
| JP3875447B2 (ja) | 2000-03-15 | 2007-01-31 | 本田技研工業株式会社 | 車両の横転判定方法 |
| US6611784B2 (en) * | 2000-03-17 | 2003-08-26 | Honda Giken Kogyo Kabushiki Kaisha | Process for determining lateral overturning of vehicle |
| JP3837270B2 (ja) | 2000-03-22 | 2006-10-25 | 本田技研工業株式会社 | 車両の乗員保護装置 |
| DE10112315B4 (de) * | 2000-03-17 | 2004-10-14 | Honda Giken Kogyo K.K. | Verfahren zur Bestimmung eines Seitenüberschlags eines Fahrzeugs und Insassenschutzsystem in einem Fahrzeug |
| JP2001264352A (ja) | 2000-03-17 | 2001-09-26 | Honda Motor Co Ltd | 車両の横転判定方法 |
| DE10025259C2 (de) * | 2000-05-22 | 2003-03-20 | Conti Temic Microelectronic | Verfahren zur Erzeugung eines Auslösealgorithmus zur Erkennung eines Überschlages für ein Sicherheitssystem in einem Kraftfahrzeug |
| US6259042B1 (en) * | 2000-05-24 | 2001-07-10 | Trw Inc. | Weight determining system |
| US6282474B1 (en) * | 2000-06-04 | 2001-08-28 | Ford Global Technologies, Inc. | Method and apparatus for detecting rollover of an automotive vehicle |
| US6542792B2 (en) * | 2000-11-29 | 2003-04-01 | Delphi Technologies, Inc. | Vehicle rollover detection apparatus and method |
| JP3518509B2 (ja) * | 2000-12-28 | 2004-04-12 | トヨタ自動車株式会社 | ロールオーバ判定装置 |
| JP4306125B2 (ja) * | 2000-12-28 | 2009-07-29 | トヨタ自動車株式会社 | 乗員保護装置の制御装置 |
| US6529811B2 (en) | 2001-03-01 | 2003-03-04 | Automotive Systems Laboratory, Inc. | Vehicle rollover detection system |
| US6535800B2 (en) * | 2001-05-29 | 2003-03-18 | Delphi Technologies, Inc. | Vehicle rollover sensing using angular rate sensors |
| US6560519B2 (en) * | 2001-06-28 | 2003-05-06 | Robert Bosch Corporation | Rollover-sensing system for a vehicle and method of operating the same |
| US6654671B2 (en) * | 2002-02-15 | 2003-11-25 | Delphi Technologies, Inc. | Vehicle rollover detection having variable sensitivity |
| US7475587B2 (en) | 2003-01-16 | 2009-01-13 | Methode Electronics, Inc | Omni-directional crash sensor |
| EP1644225B1 (en) | 2003-06-25 | 2009-11-04 | METHODE ELECTRONICS, Inc. | Crash sensing via piezoelectric sensors |
-
2003
- 2003-03-19 JP JP2003583878A patent/JP4317032B2/ja not_active Expired - Fee Related
- 2003-03-19 US US10/392,072 patent/US7698036B2/en not_active Expired - Fee Related
- 2003-03-19 CN CN038114704A patent/CN101115646B/zh not_active Expired - Fee Related
- 2003-03-19 AU AU2003214228A patent/AU2003214228A1/en not_active Abandoned
- 2003-03-19 EP EP03711637A patent/EP1585940A4/en not_active Withdrawn
- 2003-03-19 WO PCT/US2003/008319 patent/WO2003081179A2/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP1585940A2 (en) | 2005-10-19 |
| WO2003081179A3 (en) | 2009-06-18 |
| CN101115646A (zh) | 2008-01-30 |
| JP2006501092A (ja) | 2006-01-12 |
| AU2003214228A1 (en) | 2003-10-08 |
| EP1585940A4 (en) | 2009-09-02 |
| AU2003214228A8 (en) | 2009-07-30 |
| WO2003081179A9 (en) | 2009-08-06 |
| CN101115646B (zh) | 2011-11-16 |
| WO2003081179A2 (en) | 2003-10-02 |
| US7698036B2 (en) | 2010-04-13 |
| US20030182042A1 (en) | 2003-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4317032B2 (ja) | 車両ロールオーバ検出システム | |
| JP4053789B2 (ja) | 車両ロールオーバ検出システム | |
| JP2005528265A (ja) | 車両ロールオーバ検出システム | |
| US7712776B2 (en) | Method and control system for predictive deployment of side-impact restraints | |
| US6002975A (en) | Vehicle rollover sensing | |
| US8086376B2 (en) | Vehicle rollover prediction with occupant restraint system activation | |
| EP1754633B1 (en) | Vehicle rollover detection apparatus and method | |
| US20040073346A1 (en) | Method for determining a decision for the triggering of restraint means in a vehicle | |
| EP1619083B1 (en) | A method and system for detecting vehicle rollover events | |
| US7890263B2 (en) | System and method for sensing and deployment control supervision of a safety device | |
| JP6412366B2 (ja) | 乗員保護装置 | |
| US7512461B2 (en) | Vehicle rollover sensing using angular accelerometer | |
| JP2009092604A (ja) | ロールオーバ判定装置 | |
| EP2289740B1 (en) | Method and control device for the detection of a ditch drive of a vehicle | |
| JP4864429B2 (ja) | 乗員保護システム | |
| JP2008528377A (ja) | セーフティシステム | |
| JP6329460B2 (ja) | 乗員保護装置 | |
| WO2015087623A1 (ja) | ロールオーバー判定装置 | |
| Prakah-Asante et al. | Obstacle state estimation for imminent crash prediction & countermeasure deployment decision-making | |
| KR20060033825A (ko) | 에어백 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080422 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080722 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080730 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080821 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090421 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090521 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120529 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |