JP6537725B2 - 交流電動機の速度推定装置、交流電動機の駆動装置、冷媒圧縮機および冷凍サイクル装置 - Google Patents
交流電動機の速度推定装置、交流電動機の駆動装置、冷媒圧縮機および冷凍サイクル装置 Download PDFInfo
- Publication number
- JP6537725B2 JP6537725B2 JP2018522360A JP2018522360A JP6537725B2 JP 6537725 B2 JP6537725 B2 JP 6537725B2 JP 2018522360 A JP2018522360 A JP 2018522360A JP 2018522360 A JP2018522360 A JP 2018522360A JP 6537725 B2 JP6537725 B2 JP 6537725B2
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- motor
- unit
- estimated
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/13—Observer control, e.g. using Luenberger observers or Kalman filters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/36—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/36—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential
- G05B11/38—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential for obtaining a proportional characteristic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/36—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential
- G05B11/40—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential for obtaining an integral characteristic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/36—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential
- G05B11/42—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential for obtaining a characteristic which is both proportional and time-dependent, e.g. P. I., P. I. D.
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/12—Observer control, e.g. using Luenberger observers or Kalman filters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/14—Estimation or adaptation of motor parameters, e.g. rotor time constant, flux, speed, current or voltage
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B1/00—Compression machines, plants or systems with non-reversible cycle
- F25B1/04—Compression machines, plants or systems with non-reversible cycle with compressor of rotary type
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Thermal Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Positive-Displacement Pumps (AREA)
Description
図1は本発明の実施の形態1に係る交流電動機の速度推定装置の構成を示す図である。以下では実施の形態1に係る交流電動機の速度推定装置を単に速度推定装置101と称する場合がある。速度推定装置101は、適応オブザーバの手法により、交流電動機2に印加される電圧ベクトルと電流ベクトルとを用いて、交流電動機2の回転速度を推定し、推定角速度ω^rとして出力する。

図6Bは本発明の実施の形態2に係る交流電動機の速度推定装置の構成を示す図である。実施の形態1、2の相違点は、実施の形態2に係る速度推定装置101では、実施の形態1に係る速度推定装置101の構成から積分器25と積分器31とが省略されている点である。具体的には、実施の形態2に係る速度推定装置101では、第1の角速度推定部21の代わりに第1の角速度推定部21Aが用いられ、第2の角速度推定部22の代わりに第2の角速度推定部22Aが用いられ、第1の角速度推定部21Aでは、積分器25が省略され、第2の角速度推定部22Aでは、積分器31が省略されている。
図8は本発明の実施の形態3に係る交流電動機の速度推定装置の構成を示す図である。実施の形態1、3の相違点は、実施の形態2に係る速度推定装置101は、実施の形態1に係る速度推定装置101の構成に加えて抑制周波数決定部32を備える点である。
図9は本発明の実施の形態4に係る交流電動機の速度推定装置の構成を示す図である。実施の形態4では複数の周波数の周期外乱によって速度が脈動しているケースについて説明する。実施の形態4に係る速度推定装置101は、第1の周期外乱によって生じる実角速度の第1の高周波成分として第2の推定角速度を演算する第2の角速度推定部22に加え、第2の周期外乱によって生じる実角速度の第2の高周波成分として第3の推定角速度を演算する第3の角速度推定部33を備える。第3の角速度推定部33の構成は第2の角速度推定部22の構成と同じであるが、第2の角速度推定部22には第1の周期外乱の周波数が入力されるのに対して、第3の角速度推定部33には第2の周期外乱の周波数が入力される点が異なる。なお図5に示すプロセッサ901の演算処理能力に余裕がある場合には、速度推定装置101ではより多くの角速度推定部を並列化しても良い。図9では第(n−1)の周期外乱による速度推定誤差を減らす第nの角速度推定部34を備える。ただし、nは3以上の正の整数である。
図10は本発明の実施の形態5に係る交流電動機の駆動装置の構成を示す図である。以下では実施の形態5に係る交流電動機の駆動装置を単に駆動装置102と称する場合がある。駆動装置102は、実施の形態1、実施の形態2または実施の形態3に係る速度推定装置101と、速度制御部5と、電圧印加部であるトルク制御部6と、加算器7と、周期外乱によって生じる速度脈動を軽減する補償トルク信号を生成する補償トルク演算部8とを備える。速度制御部5には一般的にPID制御器が使用され、速度制御部5は、速度偏差が零になるように、速度偏差をもとに比例、積分および微分操作を行ってトルク指令を生成する。上記の速度偏差は速度偏差=角速度指令−推定角速度として求められる。なお速度制御部5では、角速度指令からフィードフォワードでトルク指令が生成される場合もあり、PID制御器とフィードフォワード制御器とが併用される場合もある。トルク制御部6は図5に示す電圧印加部3を内包している。
図11は本発明の実施の形態6に係る交流電動機の駆動装置の構成を示す図である。実施の形態5と実施の形態6の相違点は、実施の形態6に係る駆動装置102では、実施の形態5に係る駆動装置102の補償トルク演算部8に代えて、速度脈動を抑えるように動作する速度脈動抑制部9が用いられていることである。
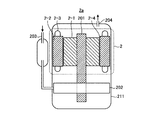
図13は本発明の実施の形態7に係る冷媒圧縮機の構成を示す図である。実施の形態7に係る冷媒圧縮機200は、実施の形態6に係る駆動装置102と圧縮機構2aとを備える。図13に示す圧縮機構2aは交流電動機2、シャフト201および圧縮部202を備える。実施の形態7に係る冷媒圧縮機200は、交流電動機2の速度脈動を軽減するため、実施の形態6に係る第2の角速度推定部22および速度脈動抑制部9を備える。
図17は本発明の実施の形態8に係る冷凍サイクル装置の構成を示す図である。図17に示される冷凍サイクル装置300は、交流電動機の駆動装置102と、圧縮機構2aと、圧縮機構2aに配管305を介して接続される凝縮器301と、凝縮器301に配管305を介して接続される受液器302と、受液器302に配管305を介して接続される膨張弁303と、膨張弁303に配管305を介して接続される蒸発器304とを備える。蒸発器304は吸入パイプ203に接続される。
Claims (17)
- 交流電動機の電圧、電流、および推定角速度に基づきモデル偏差を演算するモデル偏差演算部と、
前記モデル偏差に基づき実角速度の直流成分を含む低周波成分として第1の推定角速度を演算する第1の角速度推定部と、
前記モデル偏差に含まれる特定の高周波成分に基づき実角速度の高周波成分として第2の推定角速度を演算する第2の角速度推定部と、
前記第1の推定角速度と前記第2の推定角速度とを加算する加算器と
を備え、
前記第1の推定角速度と前記第2の推定角速度との加算値を前記推定角速度として前記モデル偏差演算部にフィードバックすることを特徴とする交流電動機の速度推定装置。 - 前記第2の角速度推定部は、
前記モデル偏差に含まれる特定の高周波成分を直流化して抽出する周波数分析器と、
前記周波数分析器によって抽出された前記高周波成分に基づき角速度の脈動成分を推定する角速度補助演算器と、
前記角速度補助演算器の出力を交流に復元する交流復元器と、
を備えることを特徴とする請求項1に記載の交流電動機の速度推定装置。 - 前記高周波成分は、周期外乱に起因する脈動成分であることを特徴とする請求項1または請求項2に記載の交流電動機の速度推定装置。
- 抑制する周期外乱の周波数を決定する抑制周波数決定部を備え、
前記抑制周波数決定部は、交流電動機の角速度と周期外乱の周波数の比率を推定角速度に乗じて抑制周波数を決定することを特徴とする請求項1から請求項3の何れか一項に記載の交流電動機の速度推定装置。 - 前記第2の角速度推定部をn個(nは2以上の自然数)備え、
前記加算器は、前記n個の前記第2の角速度推定部の出力を加算し、
各前記第2の角速度推定部は、それぞれ異なる周波数の高周波成分に基づき交流電動機の角速度を推定し、
前記第1の角速度推定部の出力と前記n個の前記第2の角速度推定部の出力との総和を前記推定角速度として前記モデル偏差演算部にフィードバックすることを特徴とする請求項1から請求項4の何れか一項に記載の交流電動機の速度推定装置。 - 前記第2の角速度推定部は、前記角速度補助演算器として2つのPI制御器をそれぞれ備え、
前記周波数分析器は、前記高周波成分を余弦成分と正弦成分に分けて分析し、
前記2つのPI制御器は、前記周波数分析器によって分けられた余弦成分と正弦成分をそれぞれPI制御して推定角速度の余弦成分と正弦成分を演算し、
前記交流復元器は、推定角速度の余弦成分と正弦成分に余弦波と正弦波をそれぞれ乗じ、これらを足し合わせることで推定角速度の高周波成分を求めることを特徴とする請求項2に記載の交流電動機の速度推定装置。 - 前記第2の角速度推定部は、前記角速度補助演算器として2つのPI制御器と積分器をそれぞれ備え、
前記周波数分析器は、前記高周波成分を余弦成分と正弦成分に分けて分析し、
前記2つのPI制御器は、前記周波数分析器によって分けられた余弦成分と正弦成分をそれぞれPI制御して推定角加速度の余弦成分と正弦成分を演算し、
前記交流復元器は、推定角加速度の余弦成分と正弦成分に余弦波と正弦波をそれぞれ乗じ、これらを足し合わせることで推定加速度の高周波成分を求め、
前記積分器は推定角加速度の高周波成分を積分し、推定角速度の高周波成分を求めることを特徴とする請求項2に記載の交流電動機の速度推定装置。 - 請求項1から請求項7の何れか一項に記載の交流電動機の速度推定装置と、
前記交流電動機に電圧を印加する電圧印加部と、
前記交流電動機に流れる電流を検出する電流検出部と
を備え、
前記速度推定装置が推定した推定角速度と前記交流電動機に流れる電流とから前記交流電動機に印加する電圧を決定することを特徴とする交流電動機の駆動装置。 - 請求項7に記載の交流電動機の速度推定装置と、
前記交流電動機に電圧を印加する電圧印加部と、
前記交流電動機に流れる電流を検出する電流検出部と、
周期外乱によって生じる速度脈動を軽減する補償トルク信号を生成する補償トルク演算部と
を備え、
前記補償トルク演算部は、前記角速度補助演算器により演算された前記推定角速度もしくは前記推定角加速度の高周波成分または余弦成分および正弦成分に基づき補償トルクを決定することを特徴とする交流電動機の駆動装置。 - 請求項7に記載の交流電動機の速度推定装置と、
前記交流電動機に電圧を印加する電圧印加部と、
前記交流電動機に流れる電流を検出する電流検出部と、
周期外乱によって生じる速度脈動を軽減する補償トルク信号を生成する補償トルク演算部と、
を備え、
前記補償トルク演算部は、前記交流電動機が発生するトルクと前記交流電動機の前記速度推定装置で演算された前記推定角速度および前記推定角加速度の高周波成分または余弦成分および正弦成分の何れかに基づき外乱トルクを推定し、推定外乱トルクから補償トルク信号を生成することを特徴とする交流電動機の駆動装置。 - 前記周期外乱は前記交流電動機に接続された機械負荷装置の負荷トルク脈動であり、
前記補償トルク演算部は、前記負荷トルク脈動によって生じる速度脈動を抑制することを特徴とする請求項9または請求項10に記載の交流電動機の駆動装置。 - 前記周期外乱は前記電圧印加部の短絡防止時間に起因して生じるトルクリプルであり、
前記補償トルク演算部は、当該トルクリプルによって生じる速度脈動を抑制することを特徴とする請求項9または請求項10に記載の交流電動機の駆動装置。 - 前記周期外乱は前記交流電動機の誘起電圧の歪に起因するトルクリプルであり、
前記補償トルク演算部は、当該トルクリプルによって生じる速度脈動を抑制することを特徴とする請求項9または請求項10に記載の交流電動機の駆動装置。 - 前記周期外乱は前記電流検出部のオフセット誤差に起因するトルクリプルであり、
前記補償トルク演算部は、当該トルクリプルによって生じる速度脈動を抑制することを特徴とする請求項9または請求項10に記載の交流電動機の駆動装置。 - 前記周期外乱は前記電流検出部の電流検出ゲイン誤差に起因するトルクリプルであり、
前記補償トルク演算部は、当該トルクリプルによって生じる速度脈動を抑制することを特徴とする請求項9または請求項10に記載の交流電動機の駆動装置。 - 請求項8から請求項15の何れか一項に記載の交流電動機の駆動装置と、
当該交流電動機の駆動装置によって電圧が印加される交流電動機と、
当該交流電動機によって冷媒を圧縮する圧縮部と
を備えることを特徴とする冷媒圧縮機。 - 請求項16に記載の冷媒圧縮機と、凝縮器と、蒸発器と、膨張弁とを備えることを特徴とする冷凍サイクル装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016114609 | 2016-06-08 | ||
| JP2016114609 | 2016-06-08 | ||
| PCT/JP2017/015561 WO2017212794A1 (ja) | 2016-06-08 | 2017-04-18 | 交流電動機の速度推定装置、交流電動機の駆動装置、冷媒圧縮機および冷凍サイクル装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017212794A1 JPWO2017212794A1 (ja) | 2018-09-06 |
| JP6537725B2 true JP6537725B2 (ja) | 2019-07-03 |
Family
ID=60577657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018522360A Active JP6537725B2 (ja) | 2016-06-08 | 2017-04-18 | 交流電動機の速度推定装置、交流電動機の駆動装置、冷媒圧縮機および冷凍サイクル装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11098928B2 (ja) |
| JP (1) | JP6537725B2 (ja) |
| CN (1) | CN109219922B (ja) |
| DE (1) | DE112017002279B4 (ja) |
| GB (1) | GB2566166B (ja) |
| WO (1) | WO2017212794A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240092889A (ko) * | 2022-12-15 | 2024-06-24 | 어보브반도체 주식회사 | 전동기 부하 변동 보상 장치 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6971925B2 (ja) * | 2018-07-11 | 2021-11-24 | 三菱電機株式会社 | モータ制御装置 |
| DE102019201798A1 (de) * | 2019-02-12 | 2020-08-13 | Festo Se & Co. Kg | Antriebssystem, Trajektorien-Planungseinheit und Verfahren |
| WO2020194401A1 (ja) * | 2019-03-22 | 2020-10-01 | 三菱電機株式会社 | 交流電動機の速度推定装置、交流電動機の駆動装置、冷媒圧縮機及び冷凍サイクル装置 |
| CN115552342B (zh) * | 2020-01-09 | 2025-07-29 | Lg伊诺特有限公司 | 用于执行控制参数设置和质量确定的生产设备 |
| CN114930713B (zh) * | 2020-01-14 | 2025-12-02 | 三菱电机株式会社 | 交流电动机的驱动装置、压缩机驱动装置以及制冷循环装置 |
| CN111756300B (zh) * | 2020-06-18 | 2022-08-05 | 中车永济电机有限公司 | 基于电流预测的适用于直线感应电机控制的死区补偿方法 |
| EP3930177A1 (de) * | 2020-06-22 | 2021-12-29 | Bombardier Transportation GmbH | Verfahren zur regelung einer elektrischen drehstrommaschine sowie drehstrommaschinensystem für ein solches verfahren |
| WO2022034674A1 (ja) * | 2020-08-13 | 2022-02-17 | 三菱電機株式会社 | 電動機駆動装置および冷凍サイクル適用機器 |
| US20240014759A1 (en) * | 2021-01-26 | 2024-01-11 | Mitsubishi Electric Corporation | Control device, power conversion apparatus, motor drive unit, and applied refrigeration cycle apparatus |
| WO2023056617A1 (en) | 2021-10-09 | 2023-04-13 | Johnson Controls Tyco IP Holdings LLP | Systems and methods for controlling variable refrigerant flow systems using artificial intelligence |
| JPWO2023238293A1 (ja) * | 2022-06-08 | 2023-12-14 | ||
| CN115051601B (zh) * | 2022-07-18 | 2025-05-02 | 湖南科技大学 | 变速旋转直流电机伺服系统的扰动补偿和跟踪控制方法 |
| JP7696510B2 (ja) * | 2022-08-19 | 2025-06-20 | 三菱電機株式会社 | 交流電動機用制御装置及び空調装置 |
| CN115483860A (zh) * | 2022-09-22 | 2022-12-16 | 珠海格力电器股份有限公司 | 永磁同步电机的转速估计方法、装置和永磁同步电机 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01308184A (ja) | 1988-06-01 | 1989-12-12 | Hitachi Ltd | 移動体の速度制御方法 |
| JP3612636B2 (ja) * | 1996-09-18 | 2005-01-19 | 有限会社シー・アンド・エス国際研究所 | 同期電動機のベクトル制御方法 |
| JP2001037281A (ja) | 1999-05-18 | 2001-02-09 | Matsushita Electric Ind Co Ltd | 電動機のトルク制御装置 |
| JP2003302413A (ja) * | 2002-04-08 | 2003-10-24 | Mitsubishi Electric Corp | 回転機の速度推定装置 |
| JP4221307B2 (ja) | 2004-01-07 | 2009-02-12 | 日立アプライアンス株式会社 | 同期電動機の制御装置,電気機器およびモジュール |
| JP4685509B2 (ja) * | 2004-07-12 | 2011-05-18 | 株式会社豊田中央研究所 | 交流電動機の駆動制御装置および駆動制御方法 |
| JP4198162B2 (ja) * | 2006-04-07 | 2008-12-17 | 三洋電機株式会社 | モータ制御装置 |
| JP5236965B2 (ja) * | 2008-02-29 | 2013-07-17 | 三菱重工業株式会社 | モータの制御装置 |
| JP2010088200A (ja) * | 2008-09-30 | 2010-04-15 | Calsonic Kansei Corp | 電動モータの制御装置 |
| JP5720677B2 (ja) * | 2010-04-17 | 2015-05-20 | 日本電産株式会社 | 交流電動機の回転子位相速度推定装置 |
| CN102361430B (zh) * | 2011-10-26 | 2013-03-13 | 哈尔滨工业大学 | 一种内置式永磁同步电机无位置传感器矢量控制装置 |
| JP5877733B2 (ja) * | 2012-02-28 | 2016-03-08 | カルソニックカンセイ株式会社 | 電動モータの制御装置 |
| CN104218856A (zh) * | 2014-09-11 | 2014-12-17 | 合肥晶弘电器有限公司 | 一种变频冰箱压缩机转子的定位方法和装置 |
-
2017
- 2017-04-18 WO PCT/JP2017/015561 patent/WO2017212794A1/ja not_active Ceased
- 2017-04-18 CN CN201780033623.0A patent/CN109219922B/zh active Active
- 2017-04-18 JP JP2018522360A patent/JP6537725B2/ja active Active
- 2017-04-18 GB GB1816623.1A patent/GB2566166B/en active Active
- 2017-04-18 DE DE112017002279.7T patent/DE112017002279B4/de active Active
- 2017-04-18 US US16/098,313 patent/US11098928B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240092889A (ko) * | 2022-12-15 | 2024-06-24 | 어보브반도체 주식회사 | 전동기 부하 변동 보상 장치 |
| KR102733527B1 (ko) * | 2022-12-15 | 2024-11-25 | 어보브반도체 주식회사 | 전동기 부하 변동 보상 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| GB2566166B (en) | 2021-08-04 |
| DE112017002279T5 (de) | 2019-01-17 |
| CN109219922A (zh) | 2019-01-15 |
| GB201816623D0 (en) | 2018-11-28 |
| US11098928B2 (en) | 2021-08-24 |
| US20190145668A1 (en) | 2019-05-16 |
| DE112017002279B4 (de) | 2023-10-26 |
| JPWO2017212794A1 (ja) | 2018-09-06 |
| WO2017212794A1 (ja) | 2017-12-14 |
| CN109219922B (zh) | 2022-03-15 |
| GB2566166A (en) | 2019-03-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6537725B2 (ja) | 交流電動機の速度推定装置、交流電動機の駆動装置、冷媒圧縮機および冷凍サイクル装置 | |
| CN105515484B (zh) | 压缩机的回转振动的抑制方法和装置及压缩机控制系统 | |
| JP6877592B2 (ja) | 駆動装置、流体利用装置及び空気調和機 | |
| JP6723479B1 (ja) | 電動機駆動装置、圧縮機駆動装置および冷凍サイクル装置 | |
| CN105529980B (zh) | 电动机控制装置、压缩机、空调机以及程序 | |
| JP6364463B2 (ja) | モータ駆動装置、及びこれを備える冷凍サイクル装置、並びにモータ駆動方法 | |
| JP6833071B2 (ja) | 駆動装置、流体利用装置及び空気調和機 | |
| JP7012901B2 (ja) | 交流電動機の速度推定装置、交流電動機の駆動装置、冷媒圧縮機及び冷凍サイクル装置 | |
| JP7204013B2 (ja) | 交流電動機の駆動装置、圧縮機駆動装置及び冷凍サイクル装置 | |
| JP7118274B2 (ja) | 駆動装置、流体利用装置及び空気調和機 | |
| TWI662782B (zh) | 馬達驅動裝置、及具備其之冷凍循環裝置、以及馬達驅動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6537725 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |