JP6731423B2 - ナビゲーション制御のための装置および方法 - Google Patents
ナビゲーション制御のための装置および方法 Download PDFInfo
- Publication number
- JP6731423B2 JP6731423B2 JP2017559927A JP2017559927A JP6731423B2 JP 6731423 B2 JP6731423 B2 JP 6731423B2 JP 2017559927 A JP2017559927 A JP 2017559927A JP 2017559927 A JP2017559927 A JP 2017559927A JP 6731423 B2 JP6731423 B2 JP 6731423B2
- Authority
- JP
- Japan
- Prior art keywords
- marker
- vehicle
- information
- markers
- rack
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/40—Control within particular dimensions
- G05D1/43—Control of position or course in two dimensions [2D]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/4189—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the transport system
- G05B19/41895—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the transport system using automatic guided vehicles [AGV]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
- G05D1/0236—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0259—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means
- G05D1/0261—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means using magnetic plots
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/65—Following a desired speed profile
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/692—Coordinated control of the position or course of two or more vehicles involving a plurality of disparate vehicles
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K19/00—Record carriers for use with machines and with at least a part designed to carry digital markings
- G06K19/06—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code
- G06K19/06009—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code with optically detectable marking
- G06K19/06018—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code with optically detectable marking one-dimensional coding
- G06K19/06028—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code with optically detectable marking one-dimensional coding using bar codes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K19/00—Record carriers for use with machines and with at least a part designed to carry digital markings
- G06K19/06—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code
- G06K19/06009—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code with optically detectable marking
- G06K19/06037—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code with optically detectable marking multi-dimensional coding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K19/00—Record carriers for use with machines and with at least a part designed to carry digital markings
- G06K19/06—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code
- G06K19/067—Record carriers with conductive marks, printed circuits or semiconductor circuit elements, e.g. credit or identity cards also with resonating or responding marks without active components
- G06K19/07—Record carriers with conductive marks, printed circuits or semiconductor circuit elements, e.g. credit or identity cards also with resonating or responding marks without active components with integrated circuit chips
- G06K19/0723—Record carriers with conductive marks, printed circuits or semiconductor circuit elements, e.g. credit or identity cards also with resonating or responding marks without active components with integrated circuit chips the record carrier comprising an arrangement for non-contact communication, e.g. wireless communication circuits on transponder cards, non-contact smart cards or RFIDs
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/083—Shipping
- G06Q10/0833—Tracking
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/50—Machine tool, machine tool null till machine tool work handling
- G05B2219/50393—Floor conveyor, AGV automatic guided vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0272—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising means for registering the travel distance, e.g. revolutions of wheels
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/10—Optical signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/50—Internal signals, i.e. from sensors located in the vehicle, e.g. from compasses or angular sensors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K19/00—Record carriers for use with machines and with at least a part designed to carry digital markings
- G06K19/06—Record carriers for use with machines and with at least a part designed to carry digital markings characterised by the kind of the digital marking, e.g. shape, nature, code
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/60—Electric or hybrid propulsion means for production processes
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Economics (AREA)
- Remote Sensing (AREA)
- Human Resources & Organizations (AREA)
- Automation & Control Theory (AREA)
- Strategic Management (AREA)
- Quality & Reliability (AREA)
- Entrepreneurship & Innovation (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Operations Research (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Marketing (AREA)
- Development Economics (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Game Theory and Decision Science (AREA)
- Electromagnetism (AREA)
- Geology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Accounting & Taxation (AREA)
- Finance (AREA)
- Manufacturing & Machinery (AREA)
- Educational Administration (AREA)
- Optics & Photonics (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Computer Hardware Design (AREA)
- Computer Networks & Wireless Communication (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Warehouses Or Storage Devices (AREA)
Description

Heuristic,H=Distance/(1+No.of Common Racks) (1)
式中、Distanceは、利用可能な注文品箱46からラック組み合わせ内の全てのラック12までの合計距離であり、No.of Common Racksは、複数のラックセットに共通のラック組み合わせ内のラック12の数である。ヒューリスティックHは、オペレータステーション14の利用可能な全ての注文品箱について計算される。
AD=minimum(X,X*0.5*NoM) (2)
DD=minimum(Y,Y*0.5*NoM) (3)
MS=minimum(max_speed,start_speed*(4*NoM) (4)
その結果、1つの実施形態によると、加速減速プロファイルは、直線で通行するマーカの数に基づいて計算される。
(2)各マーカは機械可読パターンを備える、(1)の商品取り扱いシステム。
(3)前記機械可読パターンは、バーコードまたはQRコード(登録商標)を含む、(2)の商品取り扱いシステム。
(4)各マーカはRFIDデバイスを備える、(1)の商品取り扱いシステム。
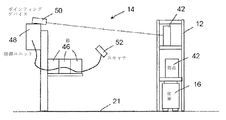
(5)少なくとも1つのオペレータステーションを備え、前記システムは、オペレータステーションへ、およびオペレータステーションから各車両を制御可能に移動させるように構成される、(1)〜(4)の商品取り扱いシステム。
(6)前記オペレータステーションはステーション待ち行列を含み、前記オペレータステーションに到着する各車両は前記ステーション待ち行列に入り、前記車両が前記ステーション待ち行列内にある時、1または複数の商品がラックに載置され、またはラックから取り出される、(5)の商品取り扱いシステム。
(7)前記マーカは、前記ステーション待ち行列の入口位置に隣接して配置された少なくとも1つの待ち行列入口マーカ、および前記ステーション待ち行列の出口位置に隣接して配置された少なくとも1つの待ち行列出口マーカを含む、(6)の商品取り扱いシステム。
(8)前記システムは複数の商品ラックを含み、各車両は、ラックをオペレータステーションへ、およびオペレータステーションから制御可能に搬送するように構成される、(5)〜(7)の商品取り扱いシステム。
(9)前記マーカはラックマーカを含み、各ラックマーカは、前記ラックがラック格納位置にある時、ラックの下にある、またはラックに隣接するように配置される、(8)の商品取り扱いシステム。
(10)前記マーカは、それぞれのラックに配置されたラックマーカを含む、(8)の商品取り扱いシステム。
(11)前記マーカは、ラック格納位置と前記少なくとも1つのオペレータステーションとの間に配置された倉庫マーカを含む、(1)〜(10)の商品取り扱いシステム。
(12)各車両は、接触部材、および前記接触部材を地面に対して制御可能に上昇または下降させるように構成されたリフトデバイスを含む、(1)〜(11)の商品取り扱いシステム。
(13)前記車両と無線通信している管理システムを備え、前記管理システムは、各マーカに関連付けられた前記ナビゲーション情報を用いて、前記規定の位置間での車両の移動を制御するための指示を提供するように構成される、(1)〜(12)の商品取り扱いシステム。
(14)前記システムは、前記車両が前記ステーション待ち行列内にある時、車両の移動の制御を前記オペレータステーションに移行するように構成される、(5)の商品取り扱いシステム。
(15)前記ナビゲーション情報は、搬送経路におけるマーカ間のナビゲーション経路を規定し、前記システムは、前記車両と隣接マーカとの間のオフセット変位を決定し、補償経路を計算するために前記決定されたオフセット変位を用いるように構成され、前記補償経路は、前記マーカ間での前記車両の移動を制御するために用いられる補償されたナビゲーション経路を生成するために前記ナビゲーション経路を修正する、(1)〜(14)の商品取り扱いシステム。
(16)前記補償経路はベジェ曲線である、(15)の商品取り扱いシステム。
(17)前記ナビゲーション経路は複数の経路セグメントに分割され、前記システムは、前記車両の移動を制御するための指示が、各経路セグメントの始点において提供されるように構成される、(15)〜(16)の商品取り扱いシステム。
(18)前記システムは、隣接マーカを含む画像を捕捉し、前記画像を処理して、前記隣接マーカの重心と前記捕捉された画像の重心との間の距離を決定することによって、前記車両と前記隣接マーカとの間のオフセット変位を決定するように構成される、(15)〜(17)の商品取り扱いシステム。
(19)前記画像は、前記隣接マーカの角の座標を決定するために処理され、前記角座標は、前記隣接マーカの回転の角度を決定するために用いられる、(18)の商品取り扱いシステム。
(20)車両の速度は、前記車両が荷積みしているかに依存する、(1)〜(19)の商品取り扱いシステム。
(21)各車両は、前記車両によって搬送される商品を計量するように構成された計量デバイスを含み、前記車両の前記速度は重量に依存する、(20)の商品取り扱いシステム。
(22)前記システムは、空のラックの既知の重心、各搬送される商品の既知の重量、および前記搬送される商品の前記ラック上での位置を用いることによって、重量分散プロファイルを決定するように構成される、(1)〜(21)の商品取り扱いシステム。
(23)前記重量分散プロファイルは、前記ラックおよび積載商品の重心を計算するため、および荷積みラックの重心が規定の範囲内であるかを決定するために用いられる、(22)の商品取り扱いシステム。
(24)前記ナビゲーション情報は、変位値および方位値を備える、(1)〜(23)の商品取り扱いシステム。
(25)前記システムは、全ての車両の前記マーカに対する位置を示す情報を格納するように構成される、(1)〜(24)の商品取り扱いシステム。
(26)前記システムは、商品が載置されたそれぞれのラック、および前記商品が載置された前記ラック上の位置を含む、前記商品取り扱いシステムに関連する全ての商品を示す在庫情報を格納するように構成される、(1)〜(25)の商品取り扱いシステム。
(27)注文処理のタイミングを管理するように構成された注文マネージャを備える、(1)〜(26)の商品取り扱いシステム。
(28)前記注文マネージャは、前記注文を履行するためにかかる予測時間に基づいて注文処理を優先順位付けするように構成される、(27)の商品取り扱いシステム。
(29)前記注文マネージャは、次のヒューリスティック、Heuristic,H=Distance/(1+No of Common Racks)を用いて、注文を履行するために用いるラック組み合わせを決定するように構成され、式中、Distanceは、利用可能な注文品箱からラック組み合わせにおける全ラックまでの合計距離であり、No of Common Racksは、複数のラックセットに共通である前記ラック組み合わせ内のラックの数である、(27)または(28)の商品取り扱いシステム。
(30)前記システムは、注文を履行するために用いる車両のセットを決定するように構成されたタスクマネージャを備える、(1)〜(29)の商品取り扱いシステム。
(31)前記選択された車両のセットにおける各車両に関する搬送経路を計算するように構成された経路計算機を備える、(1)〜(30)の商品取り扱いシステム。
(32)前記搬送経路はA*アルゴリズムを用いて計算される、(31)の商品取り扱いシステム。
(33)各車両の移動を個々に管理するように構成された車両ナビゲータを備える、(1)〜(32)の商品取り扱いシステム。
(34)前記車両ナビゲータは、検出されたマーカに関連付けられた前記固有識別情報を車両から受信し、それに応答して、前記検出されたマーカに関連付けられた前記ナビゲーション情報を前記車両へ伝達するように構成される、(33)の商品取り扱いシステム。
(35)前記システムは、前記車両間の衝突を回避するように前記車両の移動を管理するように構成される、(1)〜(34)の商品取り扱いシステム。
(36)前記システムは、マーカおよび/またはナビゲーション経路を予約し、タイミングまたは前記車両の移動および/または速度を管理し、一時的に前記搬送経路外を移動するように車両を制御するように構成される、(35)の商品取り扱いシステム。
(37)商品を取り扱う方法であって、各々が関連する固有識別情報を有する複数のマーカを規定のエリアに配置することと、マーカを検出し、前記マーカに関連付けられた前記固有識別情報を取得するように構成された少なくとも1つのセンサを各々が含み、規定の位置の間で制御可能に商品を搬送するように各々が構成された少なくとも1つの車両を提供することと、各マーカを示す情報、および各マーカに関連付けられ、前記マーカに対する少なくとも1つの規定の他のマーカの位置を示し、前記マーカと前記少なくとも1つの規定の他のマーカとの間での車両の移動を制御するために用いることができるナビゲーション情報を格納することと、複数の選択されたマーカによって規定される、規定の位置間の搬送経路を規定することと、各マーカに関連付けられた前記ナビゲーション情報を用いて前記規定の位置間での車両の移動を制御することとを備える方法。
(38)各マーカは機械可読パターンを備える、(37)の方法。
(39)前記機械可読パターンは、バーコードまたはQRコード(登録商標)を含む、(38)の方法。
(40)各マーカはRFIDデバイスを備える、(38)の方法。
(41)前記車両と無線通信している管理システムを提供することと、各マーカに関連付けられた前記ナビゲーション情報を用いて前記規定の位置間での車両の移動を制御するために前記管理システムから指示を提供することとを備える、(37)〜(40)の方法。
(42)ステーション待ち行列を有する少なくとも1つのオペレータステーションを提供することと、オペレータステーションへ、およびオペレータステーションから移動するように各車両を制御することと、前記車両が前記ステーション待ち行列内にある時、車両の移動の制御を前記オペレータステーションへ移行することとを備える、(37)〜(41)の方法。
(43)前記ナビゲーション情報は、搬送経路におけるマーカ間のナビゲーション経路を規定し、前記方法は、前記車両と隣接マーカとの間のオフセット変位を決定することと、補償経路を計算するために前記決定されたオフセット変位を用いることと、前記マーカ間での前記車両の移動を制御するために用いられる補償されたナビゲーション経路を生成するために前記ナビゲーション経路を修正することとを備える、(37)〜(42)の方法。
(44)前記補償経路はベジェ曲線である、(43)の方法。
(45)前記ナビゲーション経路を複数の経路セグメントに分割することと、各経路セグメントの始点において、前記車両の移動を制御するための指示を提供することとを備える、(43)または(44)の方法。
(46)隣接マーカを含む画像を捕捉し、前記画像を処理して、前記隣接マーカの重心と前記捕捉された画像の重心との間の距離を決定することによって、前記車両と隣接マーカとの間のオフセット変位を決定することを備える、(43)〜(45)の方法。
(47)前記隣接マーカの角の座標を決定するために前記画像を処理することと、前記隣接マーカの回転の角度を決定するために前記角座標を用いることとを備える、(46)の方法。
(48)空のラックの既知の重心、各搬送される商品の既知の重量、および前記搬送される商品の前記ラック上での位置を用いることによって、重量分散プロファイルを決定することを備える、(37)〜(47)の方法。
(49)前記ラックおよび積載商品の重心を計算するために前記重量分散プロファイルを用いることと、荷積みラックの重心が規定の範囲内であるかを決定することとを備える、(48)の方法。
(50)全ての車両の前記マーカに対する位置を示す情報を格納することを備える、(37)〜(49)の方法。
(51)注文を履行するためにかかる予測時間に基づいて注文処理を優先順位付けすることを備える、(37)〜(50)の方法。
(52)次のヒューリスティック、Heuristic,H=Distance/(1+No of Common Racks)を用いて、注文を履行するために用いるラック組み合わせを決定することを備え、式中、Distanceは、利用可能な注文品箱からラック組み合わせにおける全ラックまでの合計距離であり、No of Common Racksは、複数のラックセットに共通である前記ラック組み合わせ内のラックの数である、(37)〜(51)の方法。
(53)A*アルゴリズムを用いて前記搬送経路を計算することを備える、(52)の方法。
(54)マーカおよび/またはナビゲーション経路を予約すること、タイミングまたは前記車両の移動および/または速度を管理すること、および/または一時的に前記搬送経路外を移動するように車両を制御することによって、前記車両間の衝突を回避するように前記車両の移動を管理することを備える、(37)〜(53)に記載の方法。
(55)車両をナビゲートするためのナビゲーションシステムであって、センサに隣接したマーカを検出するように構成された少なくとも1つのセンサを備え、前記システムは、前記検出されたマーカに対する少なくとも1つの規定の他のマーカの位置を示すナビゲーション情報を用いて、前記検出されたマーカと他のマーカとの間のナビゲーション経路に沿って前記車両の移動を制御するように構成され、前記システムは、前記車両と前記検出されたマーカとの間のオフセット変位を決定し、前記決定されたオフセット変位を用いて補償経路を計算するように構成され、前記補償経路は、前記マーカ間での前記車両の移動を制御するために用いられる補償されたナビゲーション経路を生成するために前記ナビゲーション経路を修正するものであり、前記補償経路はベジェ曲線を備える、ナビゲーションシステム。
(56)前記ナビゲーション経路は複数の経路セグメントに分割され、前記システムは、各経路セグメントの始点において、前記車両の移動を制御するための指示が提供されるように構成される、(55)のナビゲーションシステム。
(57)前記システムは、隣接マーカを含む画像を捕捉し、前記画像を処理して、前記隣接マーカの重心と前記捕捉された画像の重心との間の距離を決定することによって、前記車両と隣接マーカとの間のオフセット変位を決定するように構成される、(55)または(56)のナビゲーションシステム。
(58)前記画像は、前記隣接マーカの角の座標を決定するために処理され、前記角座標は、前記隣接マーカの回転の角度を決定するために用いられる、(57)のナビゲーションシステム。
Claims (63)
- 搬送経路に沿った車両の移動を制御するための方法であって、前記方法は、
情報処理装置の回路によって、前記車両によって検出される第1のマーカに基づいて生成される第1のマーカ情報を受信することであって、前記第1のマーカは、所定の位置に設置された複数のマーカのうちの1つであることと、
前記回路によって、前記車両が前記第1のマーカから移動する前記複数のマーカのうちの第2のマーカを決定することと、
前記回路によって、前記第1のマーカ情報と、前記第1のマーカに関連付けられた所定のナビゲーション情報とに基づいて、前記第1のマーカから前記第2のマーカへの前記車両の移動を制御するための第1の制御情報を生成することであって、前記所定のナビゲーション情報は、前記第1のマーカに対する前記第2のマーカの位置を示すことと、
前記回路によって、前記第1の制御情報を前記車両へ送信することと、
を備え、
前記第1のマーカと前記第2のマーカとの間の搬送経路は、複数の経路セグメントに分割され、前記回路は、各経路セグメントの始点において、前記車両の移動を制御するために前記第1の制御情報を送信するように更に構成される、方法。 - 前記回路によって、前記第2のマーカが前記車両によって検出されることに基づいて生成される第2のマーカ情報を受信することと、
前記回路によって、前記車両が前記第2のマーカから移動する前記複数のマーカのうちの第3のマーカを決定することと、
前記第2のマーカ情報および前記所定のナビゲーション情報に基づいて、前記第2のマーカから前記第3のマーカへの前記車両の移動を制御するための第2の制御情報を生成することであって、前記所定のナビゲーション情報は、前記第2のマーカに対する前記第3のマーカの位置を示すことと、
を更に備える、請求項1に記載の方法。 - 前記第2のマーカは前記第1のマーカと隣り合い、
前記所定のナビゲーション情報は、前記第1のマーカと隣り合う前記複数のマーカの各マーカの相対位置を示す、
請求項1または2に記載の方法。 - 前記複数のマーカの各々は機械可読パターンである、請求項1乃至3のいずれか1項に記載の方法。
- 前記機械可読パターンは、バーコードおよびクイックレスポンス(QR)コード(登録商標)のうちの1つを含む、請求項4に記載の方法。
- 前記複数のマーカの各々は、無線周波数識別(RFID)デバイスを含む、請求項1乃至5のいずれか1項に記載の方法。
- 前記第1のマーカ情報は、前記機械可読パターンから前記車両によって抽出される固有識別子を含む、請求項4乃至5のいずれか1項に記載の方法。
- 前記回路によって、前記車両によって検出されるラックマーカに基づいて生成されるラックマーカ情報を受信することであって、前記ラックマーカは、前記車両によって搬送されるラックに配置されること
を更に備える、請求項1乃至7のいずれか1項に記載の方法。 - 前記第1のマーカ情報は、前記第1のマーカに対する前記車両の方位情報、および前記第1のマーカに関連付けられた識別情報を含む、請求項1乃至8のいずれか1項に記載の方法。
- 前記第1のマーカ情報は、前記車両によって捕捉される前記第1のマーカの画像を含む、請求項1乃至9のいずれか1項に記載の方法。
- 前記回路によって、前記搬送経路を計算することであって、前記搬送経路は、出発点マーカを始点とし到着点マーカを終点とする前記車両が通行する前記複数のマーカのうちのマーカのシーケンスを含むこと
を更に備える、請求項1乃至10のいずれか1項に記載の方法。 - 前記搬送経路はA*アルゴリズムを用いて計算される、請求項1乃至11のいずれか1項に記載の方法。
- メモリに格納されたマーカマップから前記所定のナビゲーション情報を検索することであって、前記マーカマップは、前記複数のマーカの各々について、前記複数のマーカのそれぞれに対する前記複数のマーカのうちの少なくとも1つの規定の他のマーカの位置を示すナビゲーション情報を含み、前記ナビゲーション情報は、前記複数のマーカのそれぞれと前記少なくとも1つの規定の他のマーカとの間の前記車両の移動を制御するために使用可能であること
を更に備える、請求項1乃至12のいずれか1項に記載の方法。 - 前記ナビゲーション情報は、前記複数のマーカのそれぞれと前記複数のマーカのうちの前記少なくとも1つの規定の他のマーカとの間の距離に対応する変位値と、方位角値とを含む、請求項13に記載の方法。
- 前記マーカマップは複数のキーを含み、前記複数のキーの各々は、前記複数のマーカの1つに対応し、
車両が前記対応するマーカに位置する時に識別情報を格納する第1のデータフィールドと、
前記対応するマーカの予約情報を格納する第2のデータフィールドと、
前記対応するマーカの近隣マーカに対応する情報を格納する第3のデータフィールドであって、前記近隣マーカは、前記対応するマーカの北方向、南方向、東方向、および西方向に配置された少なくとも1つのマーカを含み、前記情報は、前記対応するマーカから前記対応する近隣マーカへ移動する前記車両の妥当性を決定するために用いられる、第3のデータフィールドと、
前記対応するマーカの前記近隣マーカの各々までの距離を格納する第4のデータフィールドであって、前記距離は、前記対応するマーカから前記対応する近隣マーカへ移動する際に前記車両によって生じるコストを決定するために用いられる、第4のデータフィールドと、
前記車両が前記対応するマーカに商品ラックを配置することができるかを示す第5のデータフィールドと、
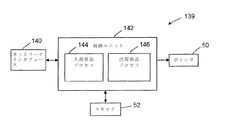
を含む、請求項13または14に記載の方法。 - 搬送経路に沿った車両の移動を制御するための情報処理装置であって、前記情報処理装置は、
回路であって、
前記車両によって検出される第1のマーカに基づいて生成される第1のマーカ情報を受信することであって、前記第1のマーカは、所定の位置に設置された複数のマーカのうちの1つであることと、
前記車両が前記第1のマーカから移動する前記複数のマーカのうちの第2のマーカを決定することと、
前記第1のマーカ情報と、前記第1のマーカに関連付けられた所定のナビゲーション情報とに基づいて、前記第1のマーカから前記第2のマーカへの前記車両の移動を制御するための第1の制御情報を生成することであって、前記所定のナビゲーション情報は、前記第1のマーカに対する前記第2のマーカの位置を示すことと、
前記第1の制御情報を前記車両へ送信することと、
を行うように構成された、回路
を備え、
前記第1のマーカと前記第2のマーカとの間の搬送経路は、複数の経路セグメントに分割され、前記回路は、各経路セグメントの始点において、前記車両の移動を制御するために前記第1の制御情報を送信するように更に構成される、情報処理装置。 - 前記回路は、
前記第2のマーカが前記車両によって検出されることに基づいて生成される第2のマーカ情報を受信することと、
前記車両が前記第2のマーカから移動する前記複数のマーカのうちの第3のマーカを決定することと、
前記第2のマーカ情報および前記所定のナビゲーション情報に基づいて、前記第2のマーカから前記第3のマーカへの前記車両の移動を制御するための第2の制御情報を生成することであって、前記所定のナビゲーション情報は、前記第2のマーカに対する前記第3のマーカの位置を示すことと、
を行うように更に構成される、請求項16に記載の情報処理装置。 - 前記第2のマーカは前記第1のマーカと隣り合い、
前記所定のナビゲーション情報は、前記第1のマーカと隣り合う前記複数のマーカの各マーカの相対位置を示す、
請求項16または17に記載の情報処理装置。 - 前記複数のマーカの各々は機械可読パターンである、請求項16乃至18のいずれか1項に記載の情報処理装置。
- 前記機械可読パターンは、バーコードおよびクイックレスポンス(QR)コード(登録商標)のうちの1つを含む、請求項19に記載の情報処理装置。
- 前記複数のマーカの各々は、無線周波数識別(RFID)デバイスを含む、請求項16乃至20のいずれか1項に記載の情報処理装置。
- 前記第1のマーカ情報は、前記機械可読パターンから前記車両によって抽出される固有識別子を含む、請求項19乃至20のいずれか1項に記載の情報処理装置。
- 前記回路は、
前記車両によって検出されるラックマーカに基づいて生成されるラックマーカ情報を受信することであって、前記ラックマーカは、前記車両によって搬送されるラックに配置されること
を行うように更に構成される、請求項16乃至22のいずれか1項に記載の情報処理装置。 - 前記第1のマーカ情報は、前記第1のマーカに対する前記車両の方位情報、および前記第1のマーカに関連付けられた識別情報を含む、請求項16乃至23のいずれか1項に記載の情報処理装置。
- 前記第1のマーカ情報は、前記車両によって捕捉される前記第1のマーカの画像を含む、請求項16乃至24のいずれか1項に記載の情報処理装置。
- 前記回路は、
前記搬送経路を計算することであって、前記搬送経路は、出発点マーカを始点とし到着点マーカを終点とする前記車両が通行する前記複数のマーカのうちのマーカのシーケンスを含むこと
を行うように更に構成される、請求項16乃至25のいずれか1項に記載の情報処理装置。 - 前記搬送経路はA*アルゴリズムを用いて計算される、請求項16乃至26のいずれか1項に記載の情報処理装置。
- 前記回路は、
メモリに格納されたマーカマップから前記所定のナビゲーション情報を検索することであって、前記マーカマップは、前記複数のマーカの各々について、前記複数のマーカのそれぞれに対する前記複数のマーカのうちの少なくとも1つの規定の他のマーカの位置を示すナビゲーション情報を含み、前記ナビゲーション情報は、前記複数のマーカのそれぞれと前記少なくとも1つの規定の他のマーカとの間の前記車両の移動を制御するために使用可能であること
を行うように更に構成される、請求項16乃至27のいずれか1項に記載の情報処理装置。 - 前記ナビゲーション情報は、前記複数のマーカのそれぞれと前記複数のマーカのうちの前記少なくとも1つの規定の他のマーカとの間の距離に対応する変位値と、方位角値とを含む、請求項28に記載の情報処理装置。
- 前記マーカマップは複数のキーを含み、前記複数のキーの各々は、前記複数のマーカの1つに対応し、
車両が前記対応するマーカに位置する時に識別情報を格納する第1のデータフィールドと、
前記対応するマーカの予約情報を格納する第2のデータフィールドと、
前記対応するマーカの近隣マーカに対応する情報を格納する第3のデータフィールドであって、前記近隣マーカは、前記マーカの北方向、南方向、東方向、および西方向に配置された少なくとも1つのマーカを含み、前記情報は、前記対応するマーカから前記対応する近隣マーカへ移動する前記車両の妥当性を決定するために用いられる、第3のデータフィールドと、
前記対応するマーカの前記近隣マーカの各々までの距離を格納する第4のデータフィールドであって、前記距離は、前記対応するマーカから前記対応する近隣マーカへ移動する際に前記車両によって生じるコストを決定するために用いられる、第4のデータフィールドと、
前記車両が前記マーカに商品ラックを配置することができるかを示す第5のデータフィールドと、
を含む、請求項28または29に記載の情報処理装置。 - コンピュータによって実行されると、前記コンピュータに、搬送経路に沿った車両の移動を制御するための方法を実行させるプログラムを格納した非一時的コンピュータ可読媒体であって、前記方法は、
前記車両によって検出される第1のマーカに基づいて生成される第1のマーカ情報を受信することであって、前記第1のマーカは、所定の位置に設置された複数のマーカのうちの1つであることと、
前記車両が前記第1のマーカから移動する前記複数のマーカのうちの第2のマーカを決定することと、
前記第1のマーカ情報と、前記第1のマーカに関連付けられた所定のナビゲーション情報とに基づいて、前記第1のマーカから前記第2のマーカへの前記車両の移動を制御するための第1の制御情報を生成することであって、前記所定のナビゲーション情報は、前記第1のマーカに対する前記第2のマーカの位置を示すことと、
前記第1の制御情報を前記車両へ送信することと、
を備え、
前記第1のマーカと前記第2のマーカとの間の搬送経路は、複数の経路セグメントに分割され、前記第1の制御情報は、各経路セグメントの始点において、前記車両の移動を制御するために送信される、非一時的コンピュータ可読媒体。 - 前記方法は、
前記第2のマーカが前記車両によって検出されることに基づいて生成される第2のマーカ情報を受信することと、
前記車両が前記第2のマーカから移動する前記複数のマーカのうちの第3のマーカを決定することと、
前記第2のマーカ情報および前記所定のナビゲーション情報に基づいて、前記第2のマーカから前記第3のマーカへの前記車両の移動を制御するための第2の制御情報を生成することであって、前記所定のナビゲーション情報は、前記第2のマーカに対する前記第3のマーカの位置を示すことと、
を更に備える、請求項31に記載の非一時的コンピュータ可読媒体。 - 前記第2のマーカは前記第1のマーカと隣り合い、
前記所定のナビゲーション情報は、前記第1のマーカと隣り合う前記複数のマーカの各マーカの相対位置を示す、
請求項31または32に記載の非一時的コンピュータ可読媒体。 - 前記複数のマーカの各々は機械可読パターンである、請求項31乃至33のいずれか1項に記載の非一時的コンピュータ可読媒体。
- 前記機械可読パターンは、バーコードおよびクイックレスポンス(QR)コード(登録商標)のうちの1つを含む、請求項34に記載の非一時的コンピュータ可読媒体。
- 前記複数のマーカの各々は、無線周波数識別(RFID)デバイスを含む、請求項31乃至35のいずれか1項に記載の非一時的コンピュータ可読媒体。
- 前記第1のマーカ情報は、前記機械可読パターンから前記車両によって抽出される固有識別子を含む、請求項34乃至35のいずれか1項に記載の非一時的コンピュータ可読媒体。
- 前記方法は、
前記車両によって検出されるラックマーカに基づいて生成されるラックマーカ情報を受信することであって、前記ラックマーカは、前記車両によって搬送されるラックに配置されること
を更に備える、請求項31乃至37のいずれか1項に記載の非一時的コンピュータ可読媒体。 - 前記第1のマーカ情報は、前記第1のマーカに対する前記車両の方位情報、および前記第1のマーカに関連付けられた識別情報を含む、請求項31乃至38のいずれか1項に記載の非一時的コンピュータ可読媒体。
- 前記第1のマーカ情報は、前記車両によって捕捉される前記第1のマーカの画像を含む、請求項31乃至39のいずれか1項に記載の非一時的コンピュータ可読媒体。
- 前記方法は、
前記搬送経路を計算することであって、前記搬送経路は、出発点マーカを始点とし到着点マーカを終点とする前記車両が通行する前記複数のマーカのうちのマーカのシーケンスを含むこと
を更に備える、請求項31乃至40のいずれか1項に記載の非一時的コンピュータ可読媒体。 - 前記搬送経路はA*アルゴリズムを用いて計算される、請求項31乃至41のいずれか1項に記載の非一時的コンピュータ可読媒体。
- 前記方法は、
メモリに格納されたマーカマップから前記所定のナビゲーション情報を検索することであって、前記マーカマップは、前記複数のマーカの各々について、前記複数のマーカのそれぞれに対する前記複数のマーカのうちの少なくとも1つの規定の他のマーカの位置を示すナビゲーション情報を含み、前記ナビゲーション情報は、前記複数のマーカのそれぞれと前記少なくとも1つの規定の他のマーカとの間の前記車両の移動を制御するために使用可能である、
を更に備える、請求項31乃至42のいずれか1項に記載の非一時的コンピュータ可読媒体。 - 前記ナビゲーション情報は、前記複数のマーカのそれぞれと前記複数のマーカのうちの前記少なくとも1つの規定の他のマーカとの間の距離に対応する変位値と、方位角値とを含む、請求項43に記載の非一時的コンピュータ可読媒体。
- 前記マーカマップは複数のキーを含み、前記複数のキーの各キーは、前記複数のマーカの1つに対応し、
車両が前記対応するマーカに位置する時に識別情報を格納する第1のデータフィールドと、
前記対応するマーカの予約情報を格納する第2のデータフィールドと、
前記対応するマーカの近隣マーカに対応する情報を格納する第3のデータフィールドであって、前記近隣マーカは、前記対応するマーカの北方向、南方向、東方向、および西方向に配置された少なくとも1つのマーカを含み、前記情報は、前記対応するマーカから前記対応する近隣マーカへ移動する前記車両の妥当性を決定するために用いられる、第3のデータフィールドと、
前記対応するマーカの前記近隣マーカの各々までの距離を格納する第4のデータフィールドであって、前記距離は、前記対応するマーカから前記対応する近隣マーカへ移動する際に前記車両によって生じるコストを決定するために用いられる、第4のデータフィールドと、
前記車両が前記マーカに商品ラックを配置することができるかを示す第5のデータフィールドと、
を含む、請求項43または44に記載の非一時的コンピュータ可読媒体。 - 搬送経路に沿って車両を移動させるための方法であって、前記方法は、
前記車両の回路によって、所定の位置に設置された複数のマーカのうちの第1のマーカを検出することと、
前記回路によって、前記検出された第1のマーカに基づいて第1のマーカ情報を生成することと、
前記回路によって、前記生成された第1のマーカ情報を情報処理装置へ送信することと、
前記回路によって、第1の制御情報を前記情報処理装置から受信することであって、前記第1の制御情報は、前記第1のマーカ情報と、前記第1のマーカ情報に応答する所定のナビゲーション情報とに基づいて前記情報処理装置によって生成されることと、
前記回路によって、前記車両に、前記第1の制御情報に基づいて前記複数のマーカのうちの第2のマーカへ移動させることと、
を備え、
前記所定のナビゲーション情報は、前記第1のマーカに対する前記第2のマーカの位置を示し、
前記第1のマーカと前記第2のマーカとの間の搬送経路は、複数の経路セグメントに分割され、前記回路は、各経路セグメントの始点において、前記車両の移動を制御するために前記第1の制御情報を受信するように更に構成される、方法。 - 前記方法は、
前記回路によって、前記第2のマーカを検出することと、
前記回路によって、前記検出された第2のマーカに基づいて第2のマーカ情報を生成することと、
前記回路によって、前記生成された第2のマーカ情報を前記情報処理装置へ送信することと、
前記回路によって、第2の制御情報を前記情報処理装置から受信することであって、前記第2の制御情報は、前記第2のマーカ情報と、前記第1のマーカ情報に応答する前記所定のナビゲーション情報とに基づいて前記情報処理装置によって生成されることと、
前記回路によって、前記車両に、前記複数のマーカのうちの第3のマーカへ移動させることと
を更に備え、
前記所定のナビゲーション情報は、前記第2のマーカに対する前記第3のマーカの位置を示す、請求項46に記載の方法。 - 前記第2のマーカは前記第1のマーカと隣り合い、
前記所定のナビゲーション情報は、前記第1のマーカと隣り合う前記複数のマーカの各マーカの相対位置を示す、
請求項46または47に記載の方法。 - 前記複数のマーカの各々は機械可読パターンである、請求項46乃至48のいずれか1項に記載の方法。
- 前記機械可読パターンは、バーコードまたはクイックレスポンス(QR)コード(登録商標)を含む、請求項49に記載の方法。
- 前記複数のマーカの各々は、無線周波数識別(RFID)デバイスを含む、請求項46乃至50のいずれか1項に記載の方法。
- 前記第1のマーカ情報を生成することは、
前記回路によって、前記機械可読パターンから固有識別子を抽出すること
を備える、請求項49乃至50のいずれか1項に記載の方法。 - 前記第1のマーカ情報は、前記第1のマーカに対する前記車両の方位情報、および前記第1のマーカに関連付けられた識別情報を含む、請求項46乃至52のいずれか1項に記載の方法。
- 前記第1のマーカ情報は、前記車両によって捕捉される前記第1のマーカの画像を含む、請求項46乃至53のいずれか1項に記載の方法。
- 回路であって、
所定の位置に設置された複数のマーカのうちの第1のマーカを検出することと、
検出された第1のマーカに基づいて第1のマーカ情報を生成することと、
生成された第1のマーカ情報を情報処理装置へ送信することと、
第1の制御情報を前記情報処理装置から受信することであって、前記第1の制御情報は、前記第1のマーカ情報と前記第1のマーカ情報に応答する所定のナビゲーション情報とに基づいて前記情報処理装置によって生成されることと、
車両に、第1の制御情報に基づいて前記複数のマーカのうちの第2のマーカへ移動させることであって、前記所定のナビゲーション情報は、前記第1のマーカに対する前記第2のマーカの位置を示すことと、
を行うように構成された、回路
を備える車両であって、
前記第1のマーカと前記第2のマーカとの間の搬送経路は、複数の経路セグメントに分割され、前記回路は、各経路セグメントの始点において、前記車両の移動を制御するために前記第1の制御情報を受信するように更に構成される、車両。 - 前記回路は、
前記第2のマーカを検出することと、
前記検出された第2のマーカに基づいて第2のマーカ情報を生成することと、
前記生成された第2のマーカ情報を前記情報処理装置へ送信することと、
第2の制御情報を前記情報処理装置から受信することであって、前記第2の制御情報は、前記第2のマーカ情報と前記第1のマーカ情報に応答する前記所定のナビゲーション情報とに基づいて前記情報処理装置によって生成されることと、
前記車両を前記複数のマーカのうちの第3のマーカへ移動させることであって、前記所定のナビゲーション情報は、前記第2のマーカに対する前記第3のマーカの位置を示すことと、
を行うように更に構成される、請求項55に記載の車両。 - 前記第2のマーカは前記第1のマーカと隣り合い、
前記所定のナビゲーション情報は、前記第1のマーカと隣り合う前記複数のマーカのうちの各マーカの相対位置を示す、
請求項55または56に記載の車両。 - 前記複数のマーカの各々は機械可読パターンである、請求項55乃至57のいずれか1項に記載の車両。
- 前記機械可読パターンは、バーコードまたはクイックレスポンス(QR)コード(登録商標)を含む、請求項58に記載の車両。
- 前記複数のマーカの各々は、無線周波数識別(RFID)デバイスを含む、請求項55乃至59のいずれか1項に記載の車両。
- 前記回路は、
前記機械可読パターンから固有識別子を抽出する
ように更に構成される、請求項58乃至59のいずれか1項に記載の車両。 - 前記第1のマーカ情報は、前記第1のマーカに対する前記車両の方位情報、および前記第1のマーカに関連付けられた識別情報を含む、請求項55乃至61のいずれか1項に記載の車両。
- 前記第1のマーカ情報は、前記車両によって捕捉される前記第1のマーカの画像を含む、請求項55乃至62のいずれか1項に記載の車両。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SG10201500882VA SG10201500882VA (en) | 2015-02-05 | 2015-02-05 | A goods handling system |
| AU2015900362 | 2015-02-05 | ||
| SG10201500882V | 2015-02-05 | ||
| AU2015900362A AU2015900362A0 (en) | 2015-02-05 | A goods handling system | |
| PCT/IB2016/000079 WO2016124999A1 (en) | 2015-02-05 | 2016-02-03 | Apparatus and method for navigation control |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018508087A JP2018508087A (ja) | 2018-03-22 |
| JP6731423B2 true JP6731423B2 (ja) | 2020-07-29 |
Family
ID=56563507
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017559927A Expired - Fee Related JP6731423B2 (ja) | 2015-02-05 | 2016-02-03 | ナビゲーション制御のための装置および方法 |
| JP2017559928A Active JP6861646B2 (ja) | 2015-02-05 | 2016-02-03 | 商品を取り扱うための装置および方法 |
| JP2017559929A Expired - Fee Related JP6752230B2 (ja) | 2015-02-05 | 2016-02-03 | ナビゲーション経路補償のための装置および方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017559928A Active JP6861646B2 (ja) | 2015-02-05 | 2016-02-03 | 商品を取り扱うための装置および方法 |
| JP2017559929A Expired - Fee Related JP6752230B2 (ja) | 2015-02-05 | 2016-02-03 | ナビゲーション経路補償のための装置および方法 |
Country Status (13)
| Country | Link |
|---|---|
| US (3) | US10216193B2 (ja) |
| EP (3) | EP3254163A4 (ja) |
| JP (3) | JP6731423B2 (ja) |
| KR (3) | KR20170134350A (ja) |
| CN (3) | CN107636547B (ja) |
| AU (3) | AU2016214108B2 (ja) |
| BR (3) | BR112017016933A2 (ja) |
| CA (3) | CA2975959A1 (ja) |
| CL (3) | CL2017002005A1 (ja) |
| DK (2) | DK3254059T3 (ja) |
| ES (2) | ES2905317T3 (ja) |
| PL (2) | PL3254059T3 (ja) |
| WO (3) | WO2016125001A1 (ja) |
Families Citing this family (106)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7776314B2 (en) | 2002-06-17 | 2010-08-17 | Grunenthal Gmbh | Abuse-proofed dosage system |
| TWI473628B (zh) | 2009-07-22 | 2015-02-21 | 用於對氧化敏感之類鴉片藥劑之抗破壞劑型 | |
| ES2648129T3 (es) | 2011-07-29 | 2017-12-28 | Grünenthal GmbH | Pastilla a prueba de manipulación que proporciona una liberación inmediata de un medicamento |
| US20130225697A1 (en) | 2012-02-28 | 2013-08-29 | Grunenthal Gmbh | Tamper-resistant dosage form comprising pharmacologically active compound and anionic polymer |
| US10427676B2 (en) * | 2017-05-31 | 2019-10-01 | GM Global Technology Operations LLC | Trajectory planner for autonomous driving using bézier curves |
| EA201692388A1 (ru) | 2014-05-26 | 2017-05-31 | Грюненталь Гмбх | Лекарственная форма в виде множества частиц, защищенная от вызываемого этанолом сброса дозы |
| CN107636547B (zh) | 2015-02-05 | 2021-01-15 | 格雷奥朗佩特有限公司 | 用于装卸货物的设备和方法 |
| CN105057219B (zh) | 2015-07-22 | 2018-11-27 | 杭州亚美利嘉科技有限公司 | 包裹分捡系统及方法 |
| WO2018006376A1 (en) * | 2016-07-07 | 2018-01-11 | SZ DJI Technology Co., Ltd. | Method and system for controlling a movable object using machine-readable code |
| US10496091B1 (en) * | 2016-08-17 | 2019-12-03 | Waymo Llc | Behavior and intent estimations of road users for autonomous vehicles |
| US10353395B2 (en) * | 2016-09-26 | 2019-07-16 | X Development Llc | Identification information for warehouse navigation |
| CN107871218B (zh) | 2016-09-27 | 2021-01-08 | 杭州海康机器人技术有限公司 | 一种跨仓储搬运控制方法、装置及系统 |
| WO2018064819A1 (zh) * | 2016-10-08 | 2018-04-12 | 浙江国自机器人技术有限公司 | 一种移动机器人的路线规划方法 |
| CN108332747A (zh) * | 2017-01-19 | 2018-07-27 | 佛山市顺德区顺达电脑厂有限公司 | 货运实时反馈系统 |
| DE102017206292B4 (de) * | 2017-04-12 | 2019-06-13 | Audi Ag | Verfahren zum Betreiben eines Transportsystems sowie entsprechendes Transportsystem |
| CN107160397B (zh) | 2017-06-09 | 2023-07-18 | 浙江立镖机器人有限公司 | 机器人行走的模块地标、地标及其机器人 |
| US10913604B2 (en) * | 2017-06-21 | 2021-02-09 | Locus Robotics Corp. | System and method for queuing robots destined for one or more processing stations |
| JP2019015681A (ja) * | 2017-07-10 | 2019-01-31 | Kyb株式会社 | 位置推定システム及び位置推定方法 |
| CA3070300A1 (en) * | 2017-07-28 | 2019-01-31 | Nuro, Inc. | Food and beverage delivery system on autonomous and semi-autonomous vehicle |
| CN114646318A (zh) * | 2017-07-28 | 2022-06-21 | 克朗设备公司 | 仓库环境中物料搬运车辆的交通管理 |
| EP4270241A3 (en) | 2017-08-15 | 2024-01-17 | Tompkins Robotics, Inc. | System and method for sorting articles using mobile sorter platforms |
| US10899542B2 (en) | 2017-08-15 | 2021-01-26 | Tompkins International | Mobile sorter platforms and method for sorting articles |
| US10012996B1 (en) * | 2017-09-15 | 2018-07-03 | Savioke, Inc. | Route planning for a mobile robot using configuration-based preferences |
| JP6663541B2 (ja) * | 2017-09-30 | 2020-03-11 | 北京極智嘉科技有限公司 | 物品運搬装置 |
| US11501246B1 (en) | 2017-11-20 | 2022-11-15 | Tompkins Robotics, Inc. | Server and related method for managing parcel delivery |
| CN109835651B (zh) * | 2017-11-27 | 2021-05-25 | 北京京东振世信息技术有限公司 | 货物分拣方法、服务器和系统 |
| CN108363385A (zh) * | 2017-12-01 | 2018-08-03 | 杭州南江机器人股份有限公司 | Agv同场工作协同方法、电子设备、存储介质及系统 |
| CN108625592B (zh) * | 2018-04-12 | 2020-05-12 | 天津大学 | 建筑外围脚手架拆除吊运方法 |
| CN108792384B (zh) * | 2018-04-18 | 2019-04-26 | 北京极智嘉科技有限公司 | 搬运方法、搬运装置及搬运系统 |
| EP3561628B1 (en) * | 2018-04-23 | 2021-11-17 | Toyota Material Handling Manufacturing Sweden AB | Industrial vehicle, system and method for optimisation of moving payload |
| CN108596540B (zh) * | 2018-04-23 | 2021-12-14 | 北京京东乾石科技有限公司 | 补货方法及装置、计算机可读存储介质、电子设备 |
| CN108383030B (zh) * | 2018-04-28 | 2023-08-22 | 北京极智嘉科技股份有限公司 | 一种顶举机器人及机器人系统 |
| US11100194B2 (en) * | 2018-06-01 | 2021-08-24 | Blackberry Limited | Method and system for cargo sensing estimation |
| EP4495030A3 (en) * | 2018-06-08 | 2025-04-02 | Attabotics Inc. | Improved storage and retrieval systems |
| FR3083357B1 (fr) * | 2018-06-27 | 2022-06-17 | Utronix | Systeme pour la gestion de stocks de produits en pile dans une zone |
| JP7084257B2 (ja) * | 2018-08-30 | 2022-06-14 | 株式会社日立製作所 | ピッキング支援システムおよび支援方法 |
| CN110929911B (zh) * | 2018-09-20 | 2025-01-17 | 北京京东尚科信息技术有限公司 | 无人设备路径规划方法和装置 |
| CN109241802B (zh) * | 2018-09-25 | 2021-08-27 | 西南科技大学 | 一种用于移动rfid系统的多标签识别方法 |
| US10852740B2 (en) * | 2018-09-28 | 2020-12-01 | X Development Llc | Determining the orientation of flat reflectors during robot mapping |
| CN109335572B (zh) * | 2018-09-30 | 2024-08-06 | 青岛港国际股份有限公司 | 一种交互系统及交互方法 |
| US10274953B1 (en) * | 2018-10-12 | 2019-04-30 | Grey Orange Pte. Ltd. | Multi-level robotics automation |
| CN109018810B (zh) | 2018-10-18 | 2020-02-21 | 北京极智嘉科技有限公司 | 对接货物容器的方法、装置、机器人和存储介质 |
| KR102138162B1 (ko) * | 2018-11-26 | 2020-07-27 | 주식회사 씨메스 | 위치 감지 시스템 |
| KR102106858B1 (ko) * | 2018-11-27 | 2020-05-06 | 노성우 | 하이브리드 타입의 물류로봇 위치추정방법 |
| CN109534222A (zh) * | 2018-11-27 | 2019-03-29 | 珠海格力电器股份有限公司 | 运输装置、家电设备系统及运输装置的控制方法 |
| KR102692121B1 (ko) * | 2018-12-07 | 2024-08-05 | 현대자동차 주식회사 | 무인운반차량 통제 시스템 및 그 방법 |
| WO2020138465A1 (ja) * | 2018-12-28 | 2020-07-02 | 愛知製鋼株式会社 | 車両及び車両用の診断システム |
| DE102019201599A1 (de) * | 2019-02-07 | 2020-08-13 | Bhs Intralogistics Gmbh | Überführungsanordnung |
| CN109867104B (zh) * | 2019-02-26 | 2021-04-09 | 珠海格力智能装备有限公司 | 对接处理方法及系统 |
| JP2020139299A (ja) * | 2019-02-27 | 2020-09-03 | 本田技研工業株式会社 | 車両搬送装置 |
| US11126188B2 (en) * | 2019-04-15 | 2021-09-21 | Caterpillar Inc. | System and method for maintaining a work surface at a worksite |
| CN110069065B (zh) * | 2019-04-24 | 2022-05-27 | 合肥柯金自动化科技股份有限公司 | 一种基于激光导航与图片识别的agv站点定位系统 |
| CN110083158B (zh) * | 2019-04-28 | 2022-08-16 | 深兰科技(上海)有限公司 | 一种确定局部规划路径的方法和设备 |
| CN111947673B (zh) * | 2019-05-17 | 2022-09-06 | 北京京东振世信息技术有限公司 | 无人车路径控制方法、装置和系统 |
| US10885338B2 (en) * | 2019-05-23 | 2021-01-05 | International Business Machines Corporation | Identifying cable ends using augmented reality |
| CN113613846B (zh) | 2019-06-11 | 2025-02-14 | 阿塔博迪克斯有限公司 | 具有共享共用机器人的互联存储结构与制造单元的制造系统 |
| CN110186451B (zh) * | 2019-06-12 | 2023-04-18 | 英业达科技有限公司 | 适用于仓储系统的导航系统与物料输送载具的导航方法 |
| US11592815B2 (en) | 2019-06-24 | 2023-02-28 | Mul Technologies, Llc | Autonomous utility cart and robotic cart platform |
| CN110450152A (zh) * | 2019-06-24 | 2019-11-15 | 广东宝乐机器人股份有限公司 | 区域识别方法、机器人和存储介质 |
| US11465846B2 (en) * | 2019-08-02 | 2022-10-11 | Packsize Llc | Dynamic cart optimization system |
| JP7156208B2 (ja) * | 2019-08-08 | 2022-10-19 | トヨタ自動車株式会社 | 車両遠隔指示システム及び遠隔指示装置 |
| US11247724B2 (en) * | 2019-08-16 | 2022-02-15 | Ford Global Technologies, Llc | Vehicle parking control |
| DE102019214145A1 (de) * | 2019-09-17 | 2021-03-18 | Zf Friedrichshafen Ag | Verfahren zur Marker-basierten Navigation für autonom fahrende Transport-Fahrzeuge |
| US20210089985A1 (en) * | 2019-09-23 | 2021-03-25 | Coupang, Corp. | Systems and methods for outbound forecasting using inbound stow model |
| US20210090106A1 (en) * | 2019-09-23 | 2021-03-25 | Coupang, Corp. | Systems and methods for outbound forecasting |
| WO2021064802A1 (ja) * | 2019-09-30 | 2021-04-08 | 日本電気株式会社 | 搬送制御方法、搬送制御装置、及び搬送制御システム |
| CN112748719B (zh) * | 2019-10-16 | 2024-10-22 | 北京京东乾石科技有限公司 | 用于控制运输车的方法和装置 |
| GB2588227B (en) * | 2019-10-18 | 2022-11-30 | Grey Orange Pte Ltd | Method and system for handling object pallets in storage facilities |
| CN111062540B (zh) * | 2019-12-25 | 2023-10-20 | 武汉万集信息技术有限公司 | 反光板布局检查方法、装置、设备及存储介质 |
| US11733706B2 (en) * | 2020-01-22 | 2023-08-22 | Grey Orange Pte. Ltd. | Method and system for traversing planned path in marked facility |
| WO2021167923A1 (en) | 2020-02-21 | 2021-08-26 | Crown Equipment Corporation | Lighting floor on sides of material handling vehicle to indicate limited or non-limited area |
| US11438886B2 (en) * | 2020-02-27 | 2022-09-06 | Psj International Ltd. | System for establishing positioning map data and method for the same |
| CN111369194A (zh) * | 2020-03-06 | 2020-07-03 | 嘉兴蓝匠仓储系统软件有限公司 | 一种自动立体库闲时理货的方法 |
| US11813542B2 (en) * | 2020-05-08 | 2023-11-14 | Universal City Studios Llc | Ride vehicle tracking system |
| KR102838643B1 (ko) | 2020-05-21 | 2025-07-28 | 하이 로보틱스 씨오., 엘티디. | 내비게이션 방법, 내비게이션 장치, 저장 매체 및 컴퓨터 프로그램 |
| CN111578930B (zh) * | 2020-05-21 | 2022-06-21 | 深圳市海柔创新科技有限公司 | 导航方法及导航装置 |
| CN111623795B (zh) * | 2020-05-28 | 2022-04-15 | 阿波罗智联(北京)科技有限公司 | 实景导航图标显示方法、装置、设备和介质 |
| CN111650936B (zh) * | 2020-06-03 | 2023-01-17 | 杭州迦智科技有限公司 | 一种伺服控制方法、处理器、存储介质和可移动平台 |
| CN111674800B (zh) | 2020-06-03 | 2021-07-09 | 灵动科技(北京)有限公司 | 用于自动驾驶系统的智能仓储技术 |
| EP3920103B1 (en) * | 2020-06-05 | 2024-08-07 | Robert Bosch GmbH | Device and method for planning an operation of a technical system |
| KR102625661B1 (ko) * | 2020-06-23 | 2024-01-16 | 세메스 주식회사 | 물품 보관 장치, 상기 물품 보관 장치의 우선 순위 설정값 계산 방법 및 이를 이용한 물품 저장 방법 |
| KR102385323B1 (ko) * | 2020-07-22 | 2022-04-12 | 주식회사 알지티 | 식당 서비스용 로봇 |
| CN112327824B (zh) | 2020-08-13 | 2024-10-18 | 北京京东乾石科技有限公司 | 用于确定货架的位置的方法和装置 |
| CN112132505B (zh) * | 2020-08-26 | 2024-02-27 | 上海姜歌机器人有限公司 | 机器人拣货方法和系统、机器人、服务器和可读存储介质 |
| US11720107B2 (en) * | 2020-09-24 | 2023-08-08 | Micron Technology, Inc. | Memory sub-system autonomous vehicle localization |
| JP7359122B2 (ja) | 2020-10-02 | 2023-10-11 | トヨタ自動車株式会社 | 搬送システム及び搬送方法 |
| JP7066029B1 (ja) | 2020-12-04 | 2022-05-12 | シャンハイ クイックトロン インテリジェント テクノロジー カンパニー リミテッド | 倉庫システムの制御方法、装置、設備及びコンピュータ可読記憶媒体 |
| CN114593729B (zh) * | 2020-12-07 | 2024-08-13 | 北斗天地股份有限公司 | 一种基于高精度惯导的采煤机导航方法 |
| JP7528813B2 (ja) * | 2021-02-16 | 2024-08-06 | トヨタ自動車株式会社 | 搬送システム及び搬送方法 |
| DE102021202323A1 (de) * | 2021-03-10 | 2022-09-15 | Dürr Systems Ag | Verfahren zur Steuerung von Förderfahrzeugen und Fördersystem |
| CN113065820B (zh) * | 2021-03-25 | 2025-02-28 | 北京京东乾石科技有限公司 | 信息生成方法、装置、电子设备和计算机可读介质 |
| NL2028482B1 (nl) * | 2021-06-18 | 2022-12-27 | Vanderlande Ind Bv | Werkwijze voor het voorkomen van een vastloop-situatie in een systeem voor het transporteren van producten |
| AU2021286449B2 (en) | 2021-07-31 | 2024-02-08 | Addverb Technologies Limited | System and method for consolidating items for fulfilment of order in warehouse |
| WO2023058344A1 (ja) * | 2021-10-04 | 2023-04-13 | 日立Astemo株式会社 | 車両制御装置 |
| CN113642971A (zh) * | 2021-10-13 | 2021-11-12 | 北京邮电大学 | 整车物流运输网络路径的订单货物多标记拆分方法及设备 |
| EP4202588B1 (en) * | 2021-12-22 | 2024-10-09 | Mobile Industrial Robots A/S | Detection of an occurring deadlock conflict in a robot fleet of autonomous mobile robots |
| CN114387337B (zh) * | 2021-12-31 | 2024-07-12 | 东莞盟大集团有限公司 | 货物出入库的物联网管理方法、装置、电子设备及介质 |
| NL2030519B1 (nl) * | 2022-01-13 | 2023-07-25 | Vanderlande Ind Bv | Werkwijze voor het toepassen van een systeem voor het transporteren van producten alsmede dergelijk systeem op zich. |
| CN118660855A (zh) * | 2022-03-25 | 2024-09-17 | 株式会社日立产业机器 | 控制系统、搬运系统以及控制方法 |
| KR102899842B1 (ko) * | 2022-07-21 | 2025-12-11 | 쿠팡 주식회사 | 전자 장치 및 그의 정보 관리 방법 |
| IT202200016308A1 (it) * | 2022-08-01 | 2024-02-01 | Toyota Mat Handling Manufacturing Italy S P A | Guida autonoma o assistita di un carrello industriale utilizzante il rilevamento di marker |
| DE102023202588A1 (de) * | 2023-03-22 | 2024-09-26 | Robert Bosch Gesellschaft mit beschränkter Haftung | Transportstreckenanordnung, Transportanordnung sowie Verfahren zum Betreiben der Transportanordnung |
| JP7669410B2 (ja) * | 2023-03-29 | 2025-04-28 | 三菱ロジスネクスト株式会社 | 荷役システムおよび無人搬送車 |
| CN116692683A (zh) * | 2023-04-27 | 2023-09-05 | 北京首钢股份有限公司 | 一种臂架起重机的控制参数优化方法、系统及介质 |
| TWI904565B (zh) * | 2024-02-02 | 2025-11-11 | 艾訊股份有限公司 | 自走車的精度量測方法、運算裝置及自走車 |
| DE102024127279A1 (de) * | 2024-09-20 | 2026-03-26 | Gerhard Schubert Gesellschaft mit beschränkter Haftung | System zum Transportieren von Objekten in einer Anlage mit einer Mehrzahl von Stationen |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2158965B (en) * | 1984-05-16 | 1988-05-18 | Gen Electric Co Plc | Driverless vehicle |
| NL8500529A (nl) | 1985-02-25 | 1986-09-16 | Ind Contractors Holland Bv | Stelsel voor het bepalen van de positie van een niet aan een vaste baan gebonden voertuig. |
| US5280431A (en) | 1985-08-30 | 1994-01-18 | Texas Instruments Incorporated | Method for controlling the movements of a mobile robot in a multiple node factory |
| US5155684A (en) | 1988-10-25 | 1992-10-13 | Tennant Company | Guiding an unmanned vehicle by reference to overhead features |
| WO1991009375A1 (en) | 1989-12-11 | 1991-06-27 | Caterpillar Inc. | Integrated vehicle positioning and navigation system, apparatus and method |
| JPH06131047A (ja) * | 1992-10-19 | 1994-05-13 | Daifuku Co Ltd | 荷搬送車の走行速度制御装置 |
| JPH08211936A (ja) * | 1995-02-02 | 1996-08-20 | Mitsubishi Heavy Ind Ltd | 移動体の誘導装置 |
| US5875408A (en) | 1995-07-17 | 1999-02-23 | Imra America, Inc. | Automated vehicle guidance system and method for automatically guiding a vehicle |
| US6092010A (en) * | 1997-09-03 | 2000-07-18 | Jervis B. Webb Company | Method and system for describing, generating and checking non-wire guidepaths for automatic guided vehicles |
| DE19804195A1 (de) * | 1998-02-03 | 1999-08-05 | Siemens Ag | Bahnplanungsverfahren für eine mobile Einheit zur Flächenbearbeitung |
| KR20000025578A (ko) * | 1998-10-13 | 2000-05-06 | 윤종용 | 차로의 모델링 방법 및 그를 이용한 차선 인식 방법 |
| JP2002132344A (ja) * | 2000-10-24 | 2002-05-10 | Nippon Seiki Co Ltd | 移動体の誘導方法 |
| US6748292B2 (en) * | 2002-07-15 | 2004-06-08 | Distrobot Systems, Inc. | Material handling method using autonomous mobile drive units and movable inventory trays |
| US7184073B2 (en) * | 2003-04-11 | 2007-02-27 | Satyam Computer Services Limited Of Mayfair Centre | System and method for warning drivers based on road curvature |
| AU2003230074A1 (en) * | 2003-05-12 | 2004-11-26 | Nokia Corporation | Navigation tags |
| US7591630B2 (en) | 2003-08-29 | 2009-09-22 | Casepick Systems, Llc | Materials-handling system using autonomous transfer and transport vehicles |
| US7991505B2 (en) | 2003-08-29 | 2011-08-02 | Casepick Systems, Llc | Materials-handling system using autonomous transfer and transport vehicles |
| US7848953B2 (en) * | 2004-03-10 | 2010-12-07 | Siebel Systems, Inc. | Order fulfillment logic for a field service system |
| JP4264399B2 (ja) * | 2004-10-04 | 2009-05-13 | 株式会社Ihi | 無人搬送車 |
| US9330373B2 (en) | 2005-07-19 | 2016-05-03 | Amazon Technologies, Inc. | Method and system for storing inventory holders |
| US8483869B2 (en) | 2005-07-19 | 2013-07-09 | Amazon Technologies, Inc. | Method and system for fulfilling requests in an inventory system |
| US7894932B2 (en) | 2005-07-19 | 2011-02-22 | Kiva Systems, Inc. | Method and system for replenishing inventory items |
| US7894933B2 (en) | 2005-07-19 | 2011-02-22 | Kiva Systems, Inc. | Method and system for retrieving inventory items |
| US20130302132A1 (en) * | 2012-05-14 | 2013-11-14 | Kiva Systems, Inc. | System and Method for Maneuvering a Mobile Drive Unit |
| US7912574B2 (en) | 2006-06-19 | 2011-03-22 | Kiva Systems, Inc. | System and method for transporting inventory items |
| JP4576445B2 (ja) | 2007-04-12 | 2010-11-10 | パナソニック株式会社 | 自律移動型装置および自律移動型装置用プログラム |
| GB2448470B (en) * | 2007-04-20 | 2012-04-04 | Ultra Global Ltd | Vehicle guidance system |
| US8031086B2 (en) * | 2008-12-10 | 2011-10-04 | Deere & Company | Method and system for determining a position of a vehicle |
| US8594835B2 (en) | 2009-04-10 | 2013-11-26 | Symbotic, LLC | Control system for storage and retrieval systems |
| DE102010015054A1 (de) * | 2010-04-15 | 2011-11-17 | Dematic Gmbh | Lager- und Transportsystem für Transportbehälter od. dgl. |
| JP5348107B2 (ja) * | 2010-10-14 | 2013-11-20 | 村田機械株式会社 | 搬送車 |
| US8686872B2 (en) * | 2010-12-29 | 2014-04-01 | GM Global Technology Operations LLC | Roadway condition warning on full windshield head-up display |
| US9323250B2 (en) * | 2011-01-28 | 2016-04-26 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| US9317037B2 (en) * | 2011-10-03 | 2016-04-19 | Vocollect, Inc. | Warehouse vehicle navigation system and method |
| US8781170B2 (en) * | 2011-12-06 | 2014-07-15 | GM Global Technology Operations LLC | Vehicle ghosting on full windshield display |
| CA2816752C (en) * | 2012-05-28 | 2022-07-05 | Well.Ca Inc. | Order processing systems using picking robots |
| US8918202B2 (en) * | 2012-08-21 | 2014-12-23 | Amazon Technologies, Inc. | Controlling mobile drive units with active markers |
| JP2014055037A (ja) * | 2012-09-11 | 2014-03-27 | International Business Maschines Corporation | 積載操作方法、システム及びコンピュータ・プログラム。 |
| US9008829B2 (en) | 2013-01-28 | 2015-04-14 | Amazon Technologies, Inc. | Inventory system with connectable inventory holders |
| US9915546B2 (en) * | 2013-05-17 | 2018-03-13 | Telenav, Inc. | Navigation system with route correction mechanism and method of operation thereof |
| JP2014228943A (ja) | 2013-05-20 | 2014-12-08 | 日本電産エレシス株式会社 | 車両用外界センシング装置、その軸ズレ補正プログラム及びその軸ズレ補正方法 |
| US9785911B2 (en) | 2013-07-25 | 2017-10-10 | I AM Robotics, LLC | System and method for piece-picking or put-away with a mobile manipulation robot |
| CN104407615B (zh) * | 2014-11-03 | 2017-01-25 | 上海电器科学研究所(集团)有限公司 | 一种agv机器人导引偏差校正方法 |
| CN107636547B (zh) | 2015-02-05 | 2021-01-15 | 格雷奥朗佩特有限公司 | 用于装卸货物的设备和方法 |
| CN105159302A (zh) * | 2015-09-23 | 2015-12-16 | 许继集团有限公司 | 一种agv小车及其自动导航方法 |
-
2016
- 2016-02-03 CN CN201680019640.4A patent/CN107636547B/zh not_active Expired - Fee Related
- 2016-02-03 KR KR1020177024884A patent/KR20170134350A/ko not_active Ceased
- 2016-02-03 PL PL16746177T patent/PL3254059T3/pl unknown
- 2016-02-03 ES ES16746177T patent/ES2905317T3/es active Active
- 2016-02-03 BR BR112017016933-9A patent/BR112017016933A2/en not_active Application Discontinuation
- 2016-02-03 JP JP2017559927A patent/JP6731423B2/ja not_active Expired - Fee Related
- 2016-02-03 ES ES16746176T patent/ES2842698T3/es active Active
- 2016-02-03 DK DK16746177.1T patent/DK3254059T3/da active
- 2016-02-03 WO PCT/IB2016/000081 patent/WO2016125001A1/en not_active Ceased
- 2016-02-03 US US15/549,332 patent/US10216193B2/en active Active
- 2016-02-03 WO PCT/IB2016/000079 patent/WO2016124999A1/en not_active Ceased
- 2016-02-03 CA CA2975959A patent/CA2975959A1/en not_active Abandoned
- 2016-02-03 KR KR1020177024886A patent/KR20170134352A/ko not_active Ceased
- 2016-02-03 JP JP2017559928A patent/JP6861646B2/ja active Active
- 2016-02-03 WO PCT/IB2016/000080 patent/WO2016125000A1/en not_active Ceased
- 2016-02-03 PL PL16746176T patent/PL3253692T3/pl unknown
- 2016-02-03 CA CA2975957A patent/CA2975957A1/en not_active Abandoned
- 2016-02-03 AU AU2016214108A patent/AU2016214108B2/en not_active Ceased
- 2016-02-03 CN CN201680019536.5A patent/CN107592921A/zh active Pending
- 2016-02-03 KR KR1020177024885A patent/KR20170134351A/ko not_active Ceased
- 2016-02-03 JP JP2017559929A patent/JP6752230B2/ja not_active Expired - Fee Related
- 2016-02-03 AU AU2016214109A patent/AU2016214109B2/en not_active Ceased
- 2016-02-03 DK DK16746176.3T patent/DK3253692T3/da active
- 2016-02-03 EP EP16746175.5A patent/EP3254163A4/en not_active Ceased
- 2016-02-03 CN CN201680019654.6A patent/CN107923754B/zh not_active Expired - Fee Related
- 2016-02-03 BR BR112017016916-9A patent/BR112017016916B1/pt not_active IP Right Cessation
- 2016-02-03 BR BR112017016941-0A patent/BR112017016941A2/en not_active Application Discontinuation
- 2016-02-03 US US15/549,329 patent/US11029701B2/en active Active
- 2016-02-03 CA CA2978213A patent/CA2978213C/en active Active
- 2016-02-03 EP EP16746176.3A patent/EP3253692B1/en active Active
- 2016-02-03 AU AU2016214107A patent/AU2016214107A1/en not_active Abandoned
- 2016-02-03 US US15/549,324 patent/US10481612B2/en active Active
- 2016-02-03 EP EP16746177.1A patent/EP3254059B1/en active Active
-
2017
- 2017-08-04 CL CL2017002005A patent/CL2017002005A1/es unknown
- 2017-08-04 CL CL2017002004A patent/CL2017002004A1/es unknown
- 2017-08-04 CL CL2017002003A patent/CL2017002003A1/es unknown
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6731423B2 (ja) | ナビゲーション制御のための装置および方法 | |
| US12441543B2 (en) | Predicting a path of material handling equipment and determining an obstacle-free path | |
| CN121563366B (zh) | 机器人的自主转运方法、设备和存储介质 | |
| US12547173B2 (en) | System and method for coordinating mobile robots with workers to access task locations |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200706 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6731423 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |