JP7268498B2 - 磁気マーカ及び磁気マーカの利用方法 - Google Patents
磁気マーカ及び磁気マーカの利用方法 Download PDFInfo
- Publication number
- JP7268498B2 JP7268498B2 JP2019116765A JP2019116765A JP7268498B2 JP 7268498 B2 JP7268498 B2 JP 7268498B2 JP 2019116765 A JP2019116765 A JP 2019116765A JP 2019116765 A JP2019116765 A JP 2019116765A JP 7268498 B2 JP7268498 B2 JP 7268498B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- magnetic
- magnetic marker
- marker
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01F—ADDITIONAL WORK, SUCH AS EQUIPPING ROADS OR THE CONSTRUCTION OF PLATFORMS, HELICOPTER LANDING STAGES, SIGNS, SNOW FENCES, OR THE LIKE
- E01F9/00—Arrangement of road signs or traffic signals; Arrangements for enforcing caution
- E01F9/30—Arrangements interacting with transmitters or receivers otherwise than by visible means, e.g. using radar reflectors or radio transmitters
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01F—ADDITIONAL WORK, SUCH AS EQUIPPING ROADS OR THE CONSTRUCTION OF PLATFORMS, HELICOPTER LANDING STAGES, SIGNS, SNOW FENCES, OR THE LIKE
- E01F9/00—Arrangement of road signs or traffic signals; Arrangements for enforcing caution
- E01F9/50—Road surface markings; Kerbs or road edgings, specially adapted for alerting road users
- E01F9/506—Road surface markings; Kerbs or road edgings, specially adapted for alerting road users characterised by the road surface marking material, e.g. comprising additives for improving friction or reflectivity; Methods of forming, installing or applying markings in, on or to road surfaces
- E01F9/524—Reflecting elements specially adapted for incorporation in or application to road surface markings
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01F—ADDITIONAL WORK, SUCH AS EQUIPPING ROADS OR THE CONSTRUCTION OF PLATFORMS, HELICOPTER LANDING STAGES, SIGNS, SNOW FENCES, OR THE LIKE
- E01F9/00—Arrangement of road signs or traffic signals; Arrangements for enforcing caution
- E01F9/50—Road surface markings; Kerbs or road edgings, specially adapted for alerting road users
- E01F9/576—Traffic lines
- E01F9/578—Traffic lines consisting of preformed elements, e.g. tapes, block-type elements specially designed or arranged to make up a traffic line
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/02—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0259—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means
- G05D1/0261—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means using magnetic plots
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/042—Detecting movement of traffic to be counted or controlled using inductive or magnetic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Architecture (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Traffic Control Systems (AREA)
- Road Signs Or Road Markings (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
磁気発生源としての磁石と、入射した電磁波の少なくとも一部を再帰反射する反射部と、を含む磁気マーカにある。
車両は、電磁波の発射方向及び電磁波の反射に要した時間に基づいて対象物の方位及び距離を取得する測距装置と、前記磁気マーカを検出して該磁気マーカに対する車両の横ずれ量を特定する磁気装置と、目標軌跡に沿って車両が走行するための目標操舵角を算出し、該目標軌跡に沿って走行するように車両を制御する処理回路と、を備えており、
車両の前方に向けて電磁波を発射して前記磁気マーカを検出し、当該磁気マーカの方位及び距離を計測する処理と、
電磁波を利用して検出された磁気マーカに車両が到達すると予測される予測到達時点、あるいは当該磁気マーカに対して予測される車両の車幅方向における偏差(横ずれ量)である予測横ずれ量を推定する処理と、
当該磁気マーカを実際に検出した時点である実際の検出時点、あるいは当該磁気マーカに対する車両の実際の偏差(横ずれ量)を特定する処理と、を含み、
前記実際の検出時点と前記予測到達時点との比較結果、及び前記実際の偏差(横ずれ量)と前記予測横ずれ量との比較結果のうち、少なくともいずれか一方の比較結果を利用し、前記測距装置による計測精度、前記磁気装置による前記磁気マーカの検出精度、前記処理回路が算出する目標操舵角の精度、及び前記目標軌跡に対する車両の追従精度のうちの少なくともいずれかの精度の向上を図る精度向上処理を実行する磁気マーカの利用方法にある。
(実施例1)
本例は、車両の運転支援を実現するために道路(車両が走行する走路の一例)に敷設される磁気マーカに関する例である。この内容について、図1~図11を用いて説明する。
(センサアレイ)
センサアレイ51は、複数の磁気センサCn(nは1~15までの整数。)と、磁気センサCnの磁気計測値を処理する検出処理回路510と、を含めて構成されている。センサアレイ51は、磁気センサC1~15が一定の間隔を空けて一直線上に配列された棒状のユニットである。センサアレイ51は、棒状の長手方向が車幅方向に沿うように車両5に取り付けられる。
検出処理回路510(図3)は、磁気センサCnの進行方向の磁気計測値を取得する(S101)。そして、検出処理回路510は、少なくともいずれかの磁気センサCnの進行方向の磁気計測値の経時変化につき、図4のX1に相当するゼロクロスの検出を試みる(S102)。検出処理回路510は、このゼロクロスを検出するまで(S102:NO)、磁気センサCnの進行方向の磁気計測値を繰り返し取得する(S101)。
ライダーユニット62(図3)は、先行車両や前方の障害物を検知するためのユニットである。ライダーユニット62は、レーザ光の反射を利用して、前方150mまでの範囲の先行車両や障害物を光学的に検知する。例えば、ACC(Adaptive Cruise Control)機能や、衝突軽減ブレーキ機能などの実現のために、多くの車両5にライダーユニット62が搭載されている。このライダーユニット62は、反射シート15を備える磁気マーカ1(図1)の光学的な検出に活用できる。
制御ユニット61(図3)は、磁気マーカ1を検出するようにライダーユニット62及びセンサアレイ51を制御すると共に、車線維持走行を実現するための車両制御を実行する。制御ユニット61によるこの車両制御の内容について、図9のフロー図を参照しながら説明する。なお、このフロー図では、先行車両と適切な車間距離を空けて追従して走行するための車速調節制御の内容を省略している。
本例は、実施例1の磁気マーカに基づいて、形態をテープ状に変更した例である。この内容について、図12及び図13を参照して説明する。
本例の磁気マーカ1(図12)は、幅150mmの連続シート状の反射テープ151の裏面(反射面の裏面)に、間隔を空けて複数の磁石シート10が配置された連続シート状(テープ状)の磁気マーカである。連続シート状の磁気マーカ1は、車線500の中央に沿って途切れなく敷設される(図13参照。)。磁気マーカ1は、反射テープ151の反射面が上面となるように路面に貼り付けられ、磁石シート10は、反射テープ151の裏側となる。磁気マーカ1は、実施例1と同じ仕様の車両によって光学的、磁気的に検出可能である。
一方、本例の連続シート状の磁気マーカ1では、磁石シート10を保持するテープ(連続シート)として反射テープ151が採用されている。したがって、磁気マーカ1に対する光学的な検出処理の結果が、実施例1とは相違する。
なお、本例に代えて、車線500の中央に沿って間隔を空けて磁石シート10を敷設した後、磁石シート10を通過するように車線500の中央に沿って再帰反射塗料による塗装ラインを形成することも良い。このライン幅としては、磁石シート10の直径を超える幅であっても良く、磁石シート10の直径よりも狭い幅であっても良い。
なお、その他の構成及び作用効果については、実施例1と同様である。
本例は、実施例1の磁気マーカに基づいて、反射部の態様を変更した例である。この内容について、図14及び図15を参照して説明する。
本例の磁気マーカ1は、磁石シート10そのものであって、実施例1で例示の反射シートを備えていない。本例の磁気マーカ1では、反射部をなす直径数10~100μmの高屈折率のガラスビーズ球108が磁石シート10の内部に分散配置され、磁気マーカ1の外表面に一部のガラスビーズ球108が露出している。
磁気マーカ1は、大判シート状の磁性シート104から打ち抜いて作成される。この磁性シート104を作製するに当たっては、まず、磁粉111(本例では磁性材料である酸化鉄の粉末、粉体)とガラスビーズ球108とを、基材となる溶融状態の樹脂材料中に混練したスラリー113を生成する。そして、このスラリー113を所定形状に成型して乾燥し、ペレット101を得る。磁性シート104は、圧延ローラ102によりペレット101をシート状に薄く引き延ばしたものである。ガラスビーズ球108が外表面に多く露出するよう、シンナー等の溶剤を利用して磁性シート104の表面を溶かす処理を実施することも良い。
なお、その他の構成及び作用効果については、実施例1と同様である。
本例は、実施例1の磁気マーカを検出して利用する方法に関する例である。この内容について、図3、図9、図16及び図17を参照して説明する。
本例は、制御ユニット61による図9中のステップS307の判断内容を、予測到達時点toの所定時間(例えば1秒)前になったか否かの判断に変更した例である。さらに本例では、ステップS309の判断について、例えば予測到達時点toから所定時間(例えば1秒)経過後など時間的な制限を組み合わせている。なお、予測到達時点toの前後の所定時間の長さを等しく設定しても良く、異なる時間を設定しても良い。
なお、その他の構成及び作用効果は、実施例1と同様である。
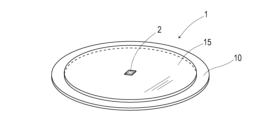
10 磁石シート(磁石)
108 ガラスビーズ球(反射部)
15 反射シート(反射部、反射層)
151 反射テープ(反射部、反射層)
2 RFIDタグ
5 車両
500 車線
51 センサアレイ(磁気装置)
Cn 磁気センサ(nは1~15の自然数)
510 検出処理回路
61 制御ユニット(処理回路)
62 ライダーユニット(測距装置)
65 操舵ユニット
66 エンジンコントロールユニット
Claims (13)
- 車両が走行する走路に間隔を空けて敷設される磁気マーカであって、
磁気発生源としての磁石と、入射した電磁波の少なくとも一部を再帰反射する反射部と、を含み、
外周側面のうちの少なくとも一部の側面が前記反射部によって形成されていると共に、当該反射部によって形成された前記少なくとも一部の側面が全周に亘っており、
前記走路に敷設された際、前記反射部によって形成された側面が、車両が前方に投射する電磁波の入射方向に面する磁気マーカ。 - 請求項1において、前記反射部は、前記磁石の外表面側に形成された反射層であって、
前記少なくとも一部の側面が該反射層によって形成されている磁気マーカ。 - 請求項2において、前記磁石は、磁性材料である酸化鉄を原料として含む磁石であり、前記外周側面は、前記磁石をなす層と、前記反射層をなす層と、を含む中間シートから前記磁気マーカを打ち抜いた際の切断面である磁気マーカ。
- 請求項2または3において、前記反射層は小片状のシート体がなす層である磁気マーカ。
- 請求項1において、前記磁気マーカは、前記磁石をなす磁性材料よりなる粉体と、前記反射部をなす粉体あるいは粒子と、が基材中に分散したものであり、
前記反射部をなす粉体あるいは粒子の一部が前記少なくとも一部の側面に露出している磁気マーカ。 - 磁気発生源としての磁石と、入射した電磁波の少なくとも一部を再帰反射する反射部と、を含み、車両の走路に敷設された磁気マーカを、車両が走行しながら検出して利用する方法であって、
車両は、前記電磁波の発射方向及び前記電磁波の反射に要した時間に基づいて対象物の方位及び距離を取得する測距装置と、前記磁気マーカを磁気的に検出して該磁気マーカに対する車両の横ずれ量を特定する磁気装置と、目標軌跡に沿って車両が走行するための目標操舵角を算出し、該目標軌跡に沿って走行するように車両を制御する処理回路と、を備えており、
車両の前方に向けて前記電磁波を発射して前記磁気マーカを検出し、当該磁気マーカの方位及び距離を計測する処理と、
前記電磁波を利用して検出された磁気マーカに車両が到達すると予測される予測到達時点、あるいは当該磁気マーカに対して予測される車両の車幅方向における偏差(横ずれ量)である予測横ずれ量を推定する処理と、
当該磁気マーカを実際に検出した時点である実際の検出時点、あるいは当該磁気マーカに対する車両の実際の偏差(横ずれ量)を特定する処理と、を含み、
前記実際の検出時点と前記予測到達時点との比較結果、及び前記実際の偏差(横ずれ量)と前記予測横ずれ量との比較結果のうち、少なくともいずれか一方の比較結果を利用し、前記測距装置による計測精度、前記磁気装置による前記磁気マーカの検出精度、前記処理回路が算出する目標操舵角の精度、及び前記目標軌跡に対する車両の追従精度のうちの少なくともいずれかの精度の向上を図る精度向上処理を実行する磁気マーカの利用方法。 - 請求項6において、前記精度向上処理は、前記実際の検出時点と前記予測到達時点との差分、及び前記実際の偏差(横ずれ量)と前記予測横ずれ量との差分のうち、少なくともいずれか一方の差分が閾値よりも大きいとき、前記磁気マーカの誤検出が生じたと判定することで前記磁気マーカの検出精度の向上を図る処理を含んでいる磁気マーカの利用方法。
- 請求項6または7において、前記精度向上処理は、前記測距装置による前記電磁波の発射方向を特定する際に基準となる軸を較正することで、前記測距装置による計測精度の向上を図る処理を含んでいる磁気マーカの利用方法。
- 請求項6~8のいずれか1項において、前記精度向上処理は、車両の直進走行に対応する操舵角の中立点を較正することで、前記処理回路が算出する目標操舵角の精度、あるいは前記目標軌跡に対する車両の追従精度の向上を図る処理を含んでいる磁気マーカの利用方法。
- 請求項4において、前記磁石と前記反射層との間に、RFIDタグが配設されている磁気マーカ。
- 請求項5において、前記少なくとも一部の側面に露出する前記反射部をなす粉体あるいは粒子は、前記外周側面に施された前記基材を溶かす処理により溶け残ったものである磁気マーカ。
- 磁気発生源としての磁石と、入射した電磁波の少なくとも一部を再帰反射する反射部と、を含み、車両の走路に敷設された磁気マーカを、車両が走行しながら検出して利用する方法であって、
車両は、前記電磁波の発射方向及び前記電磁波の反射に要した時間に基づいて対象物の方位及び距離を取得する測距装置と、前記磁気マーカを磁気的に検出して該磁気マーカに対する車両の横ずれ量を特定する磁気装置と、目標軌跡に沿って車両が走行するための目標操舵角を算出し、該目標軌跡に沿って走行するように車両を制御する処理回路と、を備えており、
車両の前方に向けて前記電磁波を発射して前記磁気マーカを検出し、当該磁気マーカの方位及び距離を計測する処理と、
前記電磁波を利用して検出された磁気マーカに車両が到達すると予測される予測到達時点を推定する処理と、を含み、
前記磁気装置は、前記予測到達時点を基準とした時間的な区間において磁気マーカを磁気的に検出するための検出処理を実行し、
当該時間的な区間が経過したときには前記磁気マーカが未検出であっても前記検出処理を中断する磁気マーカの利用方法。 - 磁気発生源としての磁石と、入射した電磁波の少なくとも一部を再帰反射する反射部と、を含み、車両の走路に敷設された磁気マーカを、車両が走行しながら検出して利用する方法であって、
車両は、前記電磁波の発射方向及び前記電磁波の反射に要した時間に基づいて対象物の方位及び距離を取得する測距装置と、前記磁気マーカを磁気的に検出して該磁気マーカに対する車両の横ずれ量を特定する磁気装置と、目標軌跡に沿って車両が走行するための目標操舵角を算出し、該目標軌跡に沿って走行するように車両を制御する処理回路と、を備えており、
車両の前方に向けて前記電磁波を発射して前記磁気マーカを検出し、当該磁気マーカの方位及び距離を計測する処理と、
前記電磁波を利用して検出された車両の前方の複数の磁気マーカを通過する軌跡を、前記目標軌跡として設定して前記目標操舵角を算出する処理と、
前記磁気装置によって磁気的に検出された磁気マーカに対する車両の横ずれ量によって前記目標操舵角を補正する処理と、を含む磁気マーカの利用方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019116765A JP7268498B2 (ja) | 2019-06-24 | 2019-06-24 | 磁気マーカ及び磁気マーカの利用方法 |
| US17/621,243 US20220396922A1 (en) | 2019-06-24 | 2020-06-19 | Magnetic marker and magnetic marker using method |
| PCT/JP2020/024093 WO2020262220A1 (ja) | 2019-06-24 | 2020-06-19 | 磁気マーカ及び磁気マーカの利用方法 |
| EP20831082.1A EP3989028A4 (en) | 2019-06-24 | 2020-06-19 | MAGNETIC MARKER AND METHOD OF USING A MAGNETIC MARKER |
| CN202080044761.0A CN113994231A (zh) | 2019-06-24 | 2020-06-19 | 磁性标识器以及磁性标识器的利用方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019116765A JP7268498B2 (ja) | 2019-06-24 | 2019-06-24 | 磁気マーカ及び磁気マーカの利用方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021002299A JP2021002299A (ja) | 2021-01-07 |
| JP7268498B2 true JP7268498B2 (ja) | 2023-05-08 |
Family
ID=73995104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019116765A Active JP7268498B2 (ja) | 2019-06-24 | 2019-06-24 | 磁気マーカ及び磁気マーカの利用方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220396922A1 (ja) |
| EP (1) | EP3989028A4 (ja) |
| JP (1) | JP7268498B2 (ja) |
| CN (1) | CN113994231A (ja) |
| WO (1) | WO2020262220A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6965815B2 (ja) * | 2018-04-12 | 2021-11-10 | 愛知製鋼株式会社 | マーカ検出システム、及びマーカ検出システムの運用方法 |
| CN113993762B (zh) * | 2019-06-21 | 2025-01-03 | 爱知制钢株式会社 | 车辆用的控制方法 |
| CN114719727B (zh) * | 2022-03-25 | 2024-06-11 | 四川腾盾科技有限公司 | 基于磁石异极相吸的航空器成品装配定位检测方法 |
| JP2024148852A (ja) * | 2023-04-06 | 2024-10-18 | 愛知製鋼株式会社 | 異常検知方法及び異常検知システム |
| CN116774213B (zh) * | 2023-08-24 | 2023-10-13 | 成都艾视特信息技术有限公司 | 一种无轨道运动机构导航方法及装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000355914A (ja) | 1999-06-15 | 2000-12-26 | Kajima Corp | 高度道路交通システム対応道路のレーンマーカーの施工方法 |
| WO2017187879A1 (ja) | 2016-04-28 | 2017-11-02 | 愛知製鋼株式会社 | 磁気マーカ及び運転支援システム |
| WO2018022834A1 (en) | 2016-07-29 | 2018-02-01 | 3M Innovative Properties Company | Radar radiation redirecting tape |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1747665A (en) * | 1927-05-18 | 1930-02-18 | Metal Traffic Marker Corp | Surface marker |
| US2354018A (en) * | 1940-08-03 | 1944-07-18 | Minnesota Mining & Mfg | Light reflector sheet |
| US3418896A (en) * | 1967-02-03 | 1968-12-31 | Prismo Safety Corp | Reflective markers and reflective elements therefor |
| US4648689A (en) * | 1983-04-11 | 1987-03-10 | Minnesota Mining And Manufacturing Company | Pavement marking tape |
| JPS61251911A (ja) * | 1985-04-30 | 1986-11-08 | Komatsu Ltd | 無人移動体の誘導方法 |
| US4737049A (en) * | 1986-12-29 | 1988-04-12 | Callhan Edward J | Roadway reflector device |
| JPH05265543A (ja) * | 1992-03-17 | 1993-10-15 | Hitachi Kiden Kogyo Ltd | 無人搬送車の誘導路及びその補修方法 |
| JPH06187032A (ja) * | 1992-12-16 | 1994-07-08 | Yaskawa Electric Corp | 移動ロボット用マーカ、情報検出装置と走行制御装置 |
| AU1032595A (en) * | 1993-11-17 | 1995-06-06 | Reflective Technology Industries Limited | Retroreflective materials |
| US6468678B1 (en) * | 1994-11-17 | 2002-10-22 | 3M Innovative Properties Company | Conformable magnetic articles for use with traffic bearing surfaces methods of making same systems including same and methods of use |
| US5684490A (en) * | 1995-03-01 | 1997-11-04 | The Ohio State University | Highway vehicle guidance system |
| CN1200158A (zh) * | 1995-10-18 | 1998-11-25 | 美国3M公司 | 铺垫在交通支承路面下方的适型磁性制品 |
| US5928761A (en) * | 1997-07-16 | 1999-07-27 | Minnesota Mining And Manufacturing Company | Retroreflective black pavement marking articles |
| US6365262B1 (en) * | 1998-10-20 | 2002-04-02 | 3M Innovative Properties Company | Pavement marking articles having enhanced retroreflectivity under dry or wet conditions and method for making same |
| US20030123931A1 (en) * | 2001-12-31 | 2003-07-03 | Khieu Sithya S. | Matrix element pavement marker and method of making same |
| US20030123930A1 (en) * | 2001-12-31 | 2003-07-03 | Jacobs Gregory F. | Matrix element magnetic pavement marker and method of making same |
| JP2003272087A (ja) * | 2002-03-13 | 2003-09-26 | Seitoo Kk | 安全運転支援システム並びにこれに適用できる路面標示並びにその施工方法 |
| JP2005202478A (ja) | 2004-01-13 | 2005-07-28 | Denso Corp | 車両用自動走行システム |
| US7690860B1 (en) * | 2007-02-23 | 2010-04-06 | Terry Utz | Traffic control device |
| BR112016003570B1 (pt) * | 2013-08-19 | 2022-05-03 | 3M Innovative Properties Company | Artigo retrorrefletivo e seu método de formação |
| US9959754B1 (en) * | 2014-01-13 | 2018-05-01 | Evolutionary Markings, Inc. | Pavement marker modules |
| US9892296B2 (en) * | 2014-11-12 | 2018-02-13 | Joseph E. Kovarik | Method and system for autonomous vehicles |
| CN108603348B (zh) * | 2016-02-10 | 2020-12-18 | 爱知制钢株式会社 | 磁性标记、磁性标记的保持方法、磁性标记用的作业装置以及磁性标记的施工方法 |
| EP3418845A4 (en) * | 2016-02-16 | 2019-10-23 | Aichi Steel Corporation | WORK VEHICLE SYSTEM AND WORKING METHOD FOR MAGNETIC MARKERS |
| JP6828314B2 (ja) * | 2016-08-30 | 2021-02-10 | 愛知製鋼株式会社 | 車両用の学習システム及び学習方法 |
-
2019
- 2019-06-24 JP JP2019116765A patent/JP7268498B2/ja active Active
-
2020
- 2020-06-19 CN CN202080044761.0A patent/CN113994231A/zh active Pending
- 2020-06-19 WO PCT/JP2020/024093 patent/WO2020262220A1/ja not_active Ceased
- 2020-06-19 EP EP20831082.1A patent/EP3989028A4/en not_active Withdrawn
- 2020-06-19 US US17/621,243 patent/US20220396922A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000355914A (ja) | 1999-06-15 | 2000-12-26 | Kajima Corp | 高度道路交通システム対応道路のレーンマーカーの施工方法 |
| WO2017187879A1 (ja) | 2016-04-28 | 2017-11-02 | 愛知製鋼株式会社 | 磁気マーカ及び運転支援システム |
| WO2018022834A1 (en) | 2016-07-29 | 2018-02-01 | 3M Innovative Properties Company | Radar radiation redirecting tape |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021002299A (ja) | 2021-01-07 |
| CN113994231A (zh) | 2022-01-28 |
| WO2020262220A1 (ja) | 2020-12-30 |
| EP3989028A1 (en) | 2022-04-27 |
| US20220396922A1 (en) | 2022-12-15 |
| EP3989028A4 (en) | 2023-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7268498B2 (ja) | 磁気マーカ及び磁気マーカの利用方法 | |
| US8744741B2 (en) | Lidars | |
| CN112904343B (zh) | 用于清除传感器遮挡的方法和系统 | |
| JP3191958B2 (ja) | ラテラル車両誘導システム | |
| US11042164B1 (en) | Light steering device with an array of oscillating reflective slats | |
| US11435439B2 (en) | Multibounce target mitigation | |
| US9063549B1 (en) | Light detection and ranging device with oscillating mirror driven by magnetically interactive coil | |
| US8970397B2 (en) | Roadside detection system, driver assistance system and roadside detecting method | |
| US10823844B2 (en) | Method and apparatus for analysis of a vehicle environment, and vehicle equipped with such a device | |
| US20200108825A1 (en) | Collision avoidance apparatus and collision avoidance method | |
| JP6430777B2 (ja) | 物体検知装置 | |
| US11435434B2 (en) | Multibounce target additional data | |
| KR20200126437A (ko) | 차량 레이더 조정 및 간섭 감소를 위한 방법 및 시스템 | |
| US20260072127A1 (en) | Signal Processing for Near-Field Radar | |
| JPH09115093A (ja) | 自動車の自動誘導装置および自動誘導方法 | |
| CN109839636B (zh) | 物体识别装置 | |
| US10907962B2 (en) | Driving assistance system mounted in vehicle | |
| US12422545B2 (en) | Detection and localization of non-line-of-sight objects using multipath radar reflections and map data | |
| JP7028982B2 (ja) | レーダ処理装置 | |
| CN109144071A (zh) | 一种狭窄车道内agv行车控制方法 | |
| CN109991603A (zh) | 车辆控制装置 | |
| JP2020082879A (ja) | 運転支援システム | |
| EP2113790A1 (en) | Improvements in LIDARs | |
| US20230221444A1 (en) | Lidar device | |
| US20240036212A1 (en) | Lane boundary detection using sub-short range active light sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230404 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7268498 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |