KR20170109528A - 자재 취급 차량용 제어 모듈 및 팜 레스트 - Google Patents
자재 취급 차량용 제어 모듈 및 팜 레스트 Download PDFInfo
- Publication number
- KR20170109528A KR20170109528A KR1020177016106A KR20177016106A KR20170109528A KR 20170109528 A KR20170109528 A KR 20170109528A KR 1020177016106 A KR1020177016106 A KR 1020177016106A KR 20177016106 A KR20177016106 A KR 20177016106A KR 20170109528 A KR20170109528 A KR 20170109528A
- Authority
- KR
- South Korea
- Prior art keywords
- control module
- operator
- vehicle
- fin
- palm rest
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0759—Details of operating station, e.g. seats, levers, operator platforms, cabin suspension
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D33/00—Superstructures for load-carrying vehicles
- B62D33/06—Drivers' cabs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07559—Stabilizing means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/01—Arrangements of two or more controlling members with respect to one another
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Vehicle Step Arrangements And Article Storage (AREA)
- Seats For Vehicles (AREA)
- Mechanical Control Devices (AREA)
- Lock And Its Accessories (AREA)
Abstract
Description
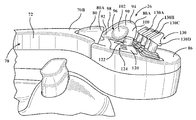
도 2는 도 1의 자재 취급 차량의 제어 모듈의 평면도;
도 3은 도 1의 자재 취급 차량의 제어 모듈의 외측면도;
도 4는 도 1의 자재 취급 차량의 제어 모듈의 내측면도;
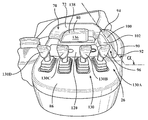
도 5는 도 1의 자재 취급 차량의 제어 모듈의 단부도(end view);
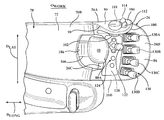
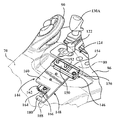
도 6은 제어 모듈을 사용하는 조작자의 손을 도시하는, 도 1의 자재 취급 차량의 제어 모듈의 평면도; 및
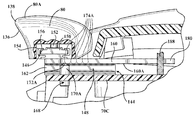
도 7 내지 도 10은 도 1의 차량의 조종석 내에서 가동 가능한 팜 레스트를 고정하도록 사용된 부착 조립체를 도시한 도면.
Claims (35)
- 자재 취급 차량으로서,
상기 차량의 주요 구조적 구성요소를 한정하는 프레임;
적재물 취급 조립체; 및
적어도 하나의 차량 기능을 제어하기 위한 제어 구조물을 포함하는 제어 모듈을 포함하는 조종석을 포함하며, 상기 제어 모듈은 상부면 및 상기 상부면으로부터 직립하는 지느러미 형상 손잡이 요소를 한정하며, 상기 지느러미 형상 손잡이 요소는, 상기 제어 모듈의 상부면과 상기 지느러미 형상 손잡이 요소의 상부 부분 사이에 언더컷 영역을 형성하도록, 상기 제어 모듈의 상부면으로부터 원위에 있는 상부 부분이 상기 제어 모듈의 상부면에 더욱 근접한 하부 부분 위로 돌출하도록 형상화되는 자재 취급 차량. - 제1항에 있어서, 상기 지느러미 형상 손잡이 요소의 상부 부분은 상기 제어 모듈의 상부면의 주요 평면에 대해 약 45°- 75°의 각도로 배향되는 자재 취급 차량.
- 제1항 또는 제2항에 있어서, 상기 지느러미 형상 손잡이 요소는 상기 조종석 내의 조작자 작업 위치에 근접하여 위치된 상기 제어 모듈의 제1 측부와 상기 조작자 작업 위치로부터 원위에 위치된 상기 제어 모듈의 제2 측부 사이에 한정된 측방향으로 상기 상부면에 대해 약 45°- 75°의 각도로 배향되는 자재 취급 차량.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 조작자의 엄지 및 집게 손가락 사이의 관절부에 의해 수용되도록 크기 설정 및 형상화되는 자재 취급 차량.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 조작자의 엄지 및 집게 손가락 사이의 관절부를 수용하는 상기 지느러미 형상 손잡이 요소의 접합점에서 측방향으로 측정될 때 약 2.5 인치 이하의 폭인 자재 취급 차량.
- 제1항 내지 제5항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소의 폭은 베이스로부터 상기 상부 부분까지 측방향으로 테이퍼지는 자재 취급 차량.
- 제1항 내지 제6항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 상기 베이스로부터 상기 상부 부분까지 연속으로 만곡된 부재를 포함하는 자재 취급 차량.
- 제1항 내지 제7항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 상기 제어 모듈을 사용하는 조작자의 엄지 손가락을 통하여 적어도 하나의 차량 기능을 제어하기 위한 제어 구조물을 포함하는 자재 취급 차량.
- 제1항 내지 제8항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 상기 차량의 주행 방향; 적어도 하나의 적재물 취급 조립체 기능; 및 차량 경적 중 적어도 하나를 제어하기 위한 제어 구조물을 포함하는 자재 취급 차량.
- 제1항 내지 제9항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 차량 경적을 울리기 위한 경적 제어 구조물, 및 적어도 하나의 다른 차량 기능을 제어하기 위한 적어도 하나의 추가 제어 구조물을 포함하며, 상기 경적 제어 구조물은 상기 조종석의 전방 부분을 향하여 상기 추가의 구조물로부터 전방에 위치되는 자재 취급 차량.
- 제1항 내지 제10항 중 어느 한 항에 있어서, 상기 제어 모듈은 조작자의 손가락 중 적어도 하나를 통하여 적어도 하나의 차량 기능을 제어하기 위하여 상기 제어 모듈의 상부면으로부터 위로 연장하는 적어도 하나의 추가 제어 구조물을 포함하는 자재 취급 차량.
- 제11항에 있어서, 상기 제어 모듈은 조작자의 손가락을 통하여 다수의 적재물 취급 조립체 기능을 제어하기 위하여 상기 제어 모듈의 상부면으로부터 위로 연장하는 다수의 추가 제어 구조물을 포함하는 자재 취급 차량.
- 제1항 내지 제12항 중 어느 한 항에 있어서, 상기 차량은 상기 제어 모듈에 근접하여 상기 조종석에 있는 팔걸이를 추가로 포함하며, 상기 팔걸이는 상기 제어 모듈을 사용하는 조작자의 팔을 수용하기 위한 것인 자재 취급 차량.
- 제13항에 있어서, 상기 차량은 상기 팔걸이에 근접하여 상기 조종석에 있는 팜 레스트를 추가로 포함하며, 상기 팜 레스트는 조작자의 손바닥을 수용하기 위한 것인 자재 취급 차량.
- 제14항에 있어서, 상기 팜 레스트는 조작자가 적어도 하나의 차량 기능을 제어하기 위해 상기 제어 구조물에 대하여 필요한 위치에서 조작자의 손을 위치시킬 수 있도록 조정 가능한 자재 취급 차량.
- 제14항 또는 제15항에 있어서, 상기 팜 레스트는 측방향과 길이 방향 모두로 조정 가능하며, 상기 측방향은 상기 조종석에 있는 조작자 작업 위치에 근접하여 위치된 상기 제어 모듈의 제1 측부와 상기 조작자 작업 위치로부터 원위에 위치된 상기 제어 모듈의 제2 측부 사이에 한정되며, 상기 길이 방향은 상기 팔걸이에 근접하여 위치된 상기 제어 모듈의 제1 단부와 상기 팔걸이로부터 원위에 위치된 상기 제어 모듈의 제2 단부 사이에서 한정되는 자재 취급 차량.
- 제1항 내지 제16항 중 어느 한 항에 있어서, 상기 제어 모듈의 상부면은 대체로 평면인 자재 취급 차량.
- 자재 취급 차량으로서,
상기 차량의 주요 구조적 구성요소를 한정하는 프레임;
적재물 취급 조립체; 및
프레임 내에 제공되는 조종석을 포함하며; 상기 조종석은,
적어도 하나의 차량 기능을 제어하기 위한 제어 구조물을 포함하는 제어 모듈;
상기 제어 모듈에 근접하고, 상기 제어 모듈을 사용하는 조작자의 팔을 수용하기 위한 팔걸이; 및
상기 팔걸이에 근접한 팜 레스트를 포함하며,
상기 팜 레스트는 조작자의 손바닥을 수용하기 위한 것이며, 조작자가 적어도 하나의 차량 기능을 제어하기 위해 상기 구조물에 대하여 손을 필요한 위치에 위치시킬 수 있도록 측방향 및 길이 방향 모두로 조정 가능하며, 상기 측방향은 상기 조종석 내의 조작자 작업 위치에 근접하여 위치된 상기 제어 모듈의 제1 측부와 상기 조작자 작업 위치로부터 원위에 위치된 상기 제어 모듈의 제2 측부 사이에서 한정되고, 상기 길이 방향은 상기 팔걸이에 근접하여 위치된 상기 제어 모듈의 제1 단부와 상기 팔걸이로부터 원위에 위치된 상기 제어 모듈의 제2 단부 사이에서 한정되는 자재 취급 차량. - 제18항에 있어서, 상기 적어도 하나의 차량 기능을 제어하기 위한 상기 제어 모듈의 상기 제어 구조물은 조작자의 손가락 중 적어도 하나를 통해 실행되기 위하여 상기 제어 모듈의 상부면으로부터 위로 연장하는 제어 구조물을 포함하는 자재 취급 차량.
- 제18항 또는 제19항에 있어서, 상기 제어 모듈은 조작자의 손가락을 통하여 다수의 적재물 취급 조립체 기능을 제어하기 위하여 상기 제어 모듈의 상부면으로부터 위로 연장하는 다수의 제어 구조물을 포함하는 자재 취급 차량.
- 제18항 내지 제20항 중 어느 한 항에 있어서, 상기 제어 모듈은 상부면을 한정하고, 상기 상부면으로부터 직립하는 지느러미 형상 손잡이 요소를 포함하며, 상기 지느러미 형상 손잡이 요소는 상기 제어 모듈의 상부면으로부터 먼 상부 부분이 상기 제어 모듈의 상부면과 상기 지느러미 형상 손잡이 요소의 상부 부분 사이에 언더컷 영역을 형성하도록 상기 제어 모듈의 상부면에 더욱 근접한 하부 부분 위로 돌출하도록 형상화되는 자재 취급 차량.
- 제21항에 있어서, 상기 지느러미 형상 손잡이 요소의 상부 부분은 상기 상부면의 주요 평면에 대해 약 45°- 75°의 각도로 배향되는 자재 취급 차량.
- 제21항 또는 제22항에 있어서, 상기 지느러미 형상 손잡이 요소는 상기 제어 모듈의 제2 측부를 향하여 측방향으로 상기 상부면에 대해 약 45°- 75°의 각도로 배향되는 자재 취급 차량.
- 제21항 내지 제23항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 조작자의 엄지 및 집게 손가락 사이의 관절부에 의해 수용되도록 크기 설정 및 형상화되는 자재 취급 차량.
- 제21항 내지 제24항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 조작자의 엄지 손가락을 통해 적어도 하나의 차량 기능을 제어하기 위한 제어 구조물을 포함하는 자재 취급 차량.
- 제21항 내지 제25항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 상기 차량의 주행 방향; 적어도 하나의 적재물 취급 조립체; 및 차량 경적 중 적어도 하나를 제어하기 위한 제어 구조물을 포함하는 자재 취급 차량.
- 제21항 내지 제26항 중 어느 한 항에 있어서, 상기 지느러미 형상 손잡이 요소는 차량 경적을 울리기 위한 경적 제어 구조물, 및 적어도 하나의 다른 차량 기능을 제어하기 위한 적어도 하나의 추가 제어 구조물을 포함하며, 상기 경적 제어 구조물은 상기 추가 제어 구조물로부터 상기 제어 모듈의 제2 단부를 향하여 전방을 향해 위치되는 자재 취급 차량.
- 제18항 내지 제27항 중 어느 한 항에 있어서, 측방향 및 길이 방향 모두로 상기 팜 레스트의 움직임을 허용하는 부착 구조물을 추가로 포함하는 자재 취급 차량.
- 제28항에 있어서, 상기 부착 구조물은 측방향 부착 조립체를 포함하며, 상기 측방향 부착 조립체는 상기 팜 레스트에 고정되어 상기 팜 레스트에 대해 움직이지 못하는 제1 부분과, 상기 측방향 부착 조립체의 제1 부분과 제2 부분 사이의 슬라이딩 움직임을 통해 상기 팜 레스트에 대해 측방향으로 움직일 수 있는 상기 제2 부분을 포함하는 자재 취급 차량.
- 제29항에 있어서, 상기 측방향 부착 조립체의 제2 부분은 상기 팜 레스트의 측방향 움직임을 실행하도록 상기 제1 부분이 채널 안에서 슬라이딩하는 상기 채널을 한정하는 자재 취급 차량.
- 제28항 내지 제30항 중 어느 한 항에 있어서, 상기 부착 구조물은 길이 방향 부착 조립체를 포함하며, 상기 길이 방향 부착 조립체는 상기 팜 레스트에 대해 길이 방향으로 움직이지 못하는 제1 단편, 및 상기 길이 방향 부착 조립체의 제1 단편과 제2 단편 사이에서 슬라이딩 움직임을 통하여 상기 팜 레스트에 대해 길이 방향으로 움직일 수 있는 상기 제2 단편을 포함하는 자재 취급 차량.
- 제31항에 있어서, 상기 길이 방향 부착 조립체의 제1 단편은 적어도 일련의 노치들을 포함하며, 상기 노치들은 길이 방향으로의 상기 팜 레스트의 추가의 움직임이 필요할 때까지 선택된 위치에서 상기 제1 단편과 상기 팜 레스트를 고정하는 고정 구조물과 결합된 적어도 하나의 돌출부를 수용할 수 있으며, 이 경우에, 상기 팜 레스트는 대응하는 노치로부터 적어도 하나의 돌출부를 제거하도록 조작자에 의해 조작될 수 있으며, 이에 의해 상기 고정 구조물에 대한 상기 팜 레스트의 길이 방향 움직임을 다시 허용하는 자재 취급 차량.
- 제18항 내지 제32항 중 어느 한 항에 있어서, 상기 팜 레스트는 상기 제어 모듈의 제2 단부를 향하여 위치된 상기 팜 레스트의 단부에 있는 언더컷 부분을 포함하며, 상기 언더컷 부분은 조작자의 손이 수평 파지 위치에 있을 때 조작자의 손가락끝을 수용하기 위한 것인 자재 취급 차량.
- 자재 취급 차량으로서,
상기 차량의 주요 구조적 구성요소를 한정하는 프레임;
적재물 취급 조립체; 및
조종석을 포함하며; 상기 조종석은:
적어도 하나의 차량 기능을 제어하기 위한 제어 구조물을 포함하는 제어 모듈;
상기 제어 모듈에 근접하고, 상기 제어 모듈을 사용하는 조작자의 팔을 수용하기 위한 팔걸이; 및
상기 팔걸이에 근접한 팜 레스트를 포함하며,
상기 팜 레스트는 조작자의 손바닥을 수용하기 위한 것이며, 상기 팜 레스트는 조작자가 상기 적어도 하나의 차량 기능을 제어하기 위한 상기 제어 구조물에 대해 필요한 위치에 조작자의 팔을 위치시킬 수 있도록 길이 방향으로 조정 가능하며, 상기 길이 방향은 상기 팔걸이에 근접하여 위치된 상기 제어 모듈의 제1 단부와 상기 팔걸이로부터 원위에 위치된 상기 제어 모듈의 제2 단부 사이에서 한정되는 자재 취급 차량. - 자재 취급 차량으로서,
상기 차량의 주요 구조적 구성요소를 한정하는 프레임;
적재물 취급 조립체; 및
조종석을 포함하며; 상기 조종석은:
적어도 하나의 차량 기능을 제어하기 위한 제어 구조물을 포함하는 제어 모듈;
상기 제어 모듈에 근접하고, 상기 제어 모듈을 사용하는 조작자의 팔을 수용하기 위한 팔걸이; 및
상기 팔걸이에 근접한 팜 레스트를 포함하며,
상기 팜 레스트는 조작자의 손바닥을 수용하기 위한 것이며, 상기 팜 레스트는 조작자가 상기 적어도 하나의 차량 기능을 제어하기 위한 상기 제어 구조물에 대해 필요한 위치에 조작자의 팔을 위치시킬 수 있도록 측방향으로 조정 가능하며, 상기 측방향은 상기 조종석 내의 조작자 작업 위치에 근접하여 위치된 상기 제어 모듈의 제1 측부와 상기 조작자 작업 위치로부터 원위에 위치된 상기 제어 모듈의 제2 측부 사이에 한정되는 자재 취급 차량.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562109105P | 2015-01-29 | 2015-01-29 | |
| US62/109,105 | 2015-01-29 | ||
| PCT/US2016/015069 WO2016123187A2 (en) | 2015-01-29 | 2016-01-27 | Control module and palm rest for a materials handling vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170109528A true KR20170109528A (ko) | 2017-09-29 |
| KR102412206B1 KR102412206B1 (ko) | 2022-06-23 |
Family
ID=55759913
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177016106A Active KR102412206B1 (ko) | 2015-01-29 | 2016-01-27 | 자재 취급 차량용 제어 모듈 및 팜 레스트 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10053346B2 (ko) |
| EP (2) | EP3366637B1 (ko) |
| KR (1) | KR102412206B1 (ko) |
| CN (1) | CN107074514B (ko) |
| AU (1) | AU2016211569C1 (ko) |
| BR (1) | BR112017008489A2 (ko) |
| WO (1) | WO2016123187A2 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200071570A (ko) * | 2018-12-11 | 2020-06-19 | 주식회사 두산 | 암레스트 장치 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITUB20152573A1 (it) * | 2015-07-28 | 2017-01-28 | Cvs Ferrari S P A | Apparecchiatura per il sollevamento ed il trasporto di carichi, in particolare di corrispondenti containers |
| ITUA20163670A1 (it) * | 2016-05-23 | 2017-11-23 | Iveco Magirus | Centro di controllo per un dispositivo aereo comprendente leva di controllo |
| USD878429S1 (en) * | 2017-01-13 | 2020-03-17 | Crown Equipment Corporation | Industrial vehicle arm pad |
| EP3858664A1 (en) * | 2017-01-13 | 2021-08-04 | Crown Equipment Corporation | Industrial vehicle armrest |
| USD944868S1 (en) | 2018-09-07 | 2022-03-01 | Crown Equipment Corporation | Arm pad |
| USD944869S1 (en) | 2018-09-07 | 2022-03-01 | Crown Equipment Corporation | Arm pad |
| USD922279S1 (en) | 2018-10-17 | 2021-06-15 | Crown Equipment Corporation | Control pod |
| JP7185789B2 (ja) | 2019-04-04 | 2022-12-07 | ジェイエルジー インダストリーズ インク. | 小型ビークル用制御ステーション |
| CN110466456B (zh) * | 2019-09-20 | 2024-12-31 | 诺力智能装备股份有限公司 | 一种适用于工业车辆的操控盒 |
| IT202000000397A1 (it) * | 2020-01-13 | 2021-07-13 | Toyota Mat Handling Manufacturing Italy S P A | Carrello elevatore. |
| IT202000022849A1 (it) * | 2020-09-28 | 2022-03-28 | Toyota Mat Handling Manufacturing Italy S P A | Carrello industriale con bracciolo migliorato e bracciolo per l'uso in un carrello industriale |
| EP4159586A1 (de) * | 2021-09-30 | 2023-04-05 | Grammer Ag | Vorrichtung für fahrzeuge zur durchführung einer lenkbewegung |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6470809A (en) * | 1987-08-26 | 1989-03-16 | Porsche Ag | Manual operator for control valve |
| JPH0881197A (ja) * | 1994-09-13 | 1996-03-26 | Komatsu Forklift Co Ltd | リーチフォークリフトトラック用操縦桿 |
| US5890562A (en) * | 1996-08-16 | 1999-04-06 | Bt Prime Mover, Inc. | Control console for material handling vehicle |
| JPH11199192A (ja) * | 1998-01-12 | 1999-07-27 | Komatsu Forklift Co Ltd | リーチ式フォークリフトのアシストグリップ |
| EP1627848A2 (de) * | 2004-08-20 | 2006-02-22 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit ergonomisch angeordneten Bedienelementen |
Family Cites Families (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4738417A (en) | 1987-02-02 | 1988-04-19 | Fmc Corporation | Hand operated control |
| USD309051S (en) | 1987-10-22 | 1990-07-03 | Yale Materials Handling Corporation | Industrial truck control handle |
| US4862165A (en) | 1988-02-12 | 1989-08-29 | Samuel Gart | Ergonomically-shaped hand controller |
| US4997054A (en) | 1989-04-14 | 1991-03-05 | J. I. Case Company | Adjustable wrist rest |
| USD336713S (en) | 1991-09-09 | 1993-06-22 | Raymond Corporation | Control handle for a material handling vehicle |
| DE4206515C1 (ko) | 1992-03-02 | 1993-03-11 | Jungheinrich Ag, 2000 Hamburg, De | |
| DE69424159D1 (de) | 1994-01-03 | 2000-05-31 | Clark Material Handling Co | Einhebelsteuervorrichtung mit mehreren funktionen für gabelstapler |
| DE59509670D1 (de) | 1994-11-08 | 2001-11-08 | Jungheinrich Ag | Handbetätigte Stellvorrichtung für einen Bedienungsstand bzw. -sitz |
| DE19624463A1 (de) | 1996-06-19 | 1998-01-02 | Fendt Xaver Gmbh & Co | Steuereinrichtung für Nutzfahrzeuge, insbesondere für landwirtschaftliche nutzbare Schlepper |
| USD405581S (en) | 1996-09-20 | 1999-02-09 | Crown Equipment Corporation | Control handle for a materials handling vehicle |
| US6025831A (en) | 1997-11-19 | 2000-02-15 | Avrotec, Inc. | Method and apparatus for accurate controls input |
| DE19816682A1 (de) | 1998-04-15 | 1999-10-21 | Still Gmbh | Multifunktionshebel |
| DE19849235B4 (de) * | 1998-10-26 | 2004-12-02 | Jungheinrich Ag | Vorrichtung zum Betätigen und Steuern einer elektrischen Lenkmotorik |
| US6564896B1 (en) | 1999-06-22 | 2003-05-20 | Caterpillar Inc | Tiltable control console for a backhoe loader machine |
| DE19951379C2 (de) | 1999-10-26 | 2001-12-13 | Jungheinrich Ag | Handbetätigtes Lenkorgan für ein Flurförderzeug |
| DE10013054A1 (de) | 2000-03-19 | 2001-09-27 | Am3 Automotive Multimedia Ag | Bedieneinheit für Multi-Media-Komponenten in einem Kraftfahrzeug |
| DE10055306A1 (de) * | 2000-11-08 | 2002-05-16 | Still Wagner Gmbh & Co Kg | Flurföderzeug mit einem in Querrichtung ausgerichteten Fahrerplatz |
| DE10110463A1 (de) | 2001-03-05 | 2002-09-12 | Still Gmbh | Bedienhebel für Flurförderzeug |
| JP3785944B2 (ja) | 2001-03-30 | 2006-06-14 | 日産自動車株式会社 | 車両用の操作部配置構造 |
| JP3900912B2 (ja) | 2001-12-05 | 2007-04-04 | 株式会社豊田自動織機 | 産業車両 |
| WO2003062127A1 (en) | 2002-01-23 | 2003-07-31 | Kabushiki Kaisha Toyota Jidoshokki | Position control device and position control method of stevedoring apparatus in industrial vehicle |
| US6971194B2 (en) | 2003-06-24 | 2005-12-06 | Cnh America Llc | Modular backhoe-excavator control station |
| FR2858861B1 (fr) | 2003-08-11 | 2007-06-22 | Manitou Bf | Dispositif de commande par interaction avec la main d'un operateur |
| DE10352695B4 (de) * | 2003-11-12 | 2019-07-18 | Jungheinrich Aktiengesellschaft | Deichsel für kraftgetriebenes Flurförderzeug |
| IES20040014A2 (en) | 2004-01-13 | 2005-09-07 | Nuala Macklin | An input device |
| USD515770S1 (en) | 2004-02-12 | 2006-02-21 | The Raymond Corporation | Control handle for a material handling vehicle |
| US7497298B2 (en) | 2004-06-22 | 2009-03-03 | Caterpillar Inc. | Machine joystick control system |
| USD548923S1 (en) | 2004-06-22 | 2007-08-14 | Jungheinrich Aktiengesellschaft | Fork lift truck |
| US7635045B2 (en) | 2004-07-30 | 2009-12-22 | Caterpillar Inc. | Machine tool control console |
| USD526109S1 (en) | 2004-09-23 | 2006-08-01 | Crown Equipment Corporation | Materials handling controller |
| USD526757S1 (en) | 2004-09-23 | 2006-08-15 | Crown Equipment Corporation | Controller for a materials handling vehicle |
| US7520567B2 (en) | 2004-09-23 | 2009-04-21 | Crown Equipment Corporation | Systems and methods for seat repositioning |
| US7121608B2 (en) | 2004-09-23 | 2006-10-17 | Crown Equipment Corporation | Rotating and/or swiveling seat |
| US7059680B2 (en) | 2004-09-23 | 2006-06-13 | Crown Equipment Corporation | Seat repositioning device with release on control handle |
| USD536153S1 (en) | 2004-09-27 | 2007-01-30 | Jungheinrich Aktiengesellschaft | Joystick |
| DE102004052757A1 (de) | 2004-10-30 | 2006-05-04 | Linde Ag | Arbeitsmaschine, insbesondere Flurförderzeug |
| US20070273207A1 (en) | 2005-02-11 | 2007-11-29 | Daimlerchrysler Ag | Operational Control for a Vehicle |
| DE102005007789A1 (de) | 2005-02-19 | 2006-08-24 | Jungheinrich Aktiengesellschaft | Handbetätigte Bedienvorrichtung für einen Bedienplatz eines Flurförderzeugs |
| JP2006240330A (ja) | 2005-02-28 | 2006-09-14 | Toyota Motor Corp | 車両用スイッチ操作機構 |
| DE102005035389A1 (de) | 2005-07-28 | 2007-02-01 | Still Gmbh | Bedienelementeeinheit mit Minihebeln |
| DE102005035382A1 (de) | 2005-07-28 | 2007-02-01 | Still Gmbh | Bedienanordnung für ein Flurförderzeug |
| DE102005049100A1 (de) | 2005-10-13 | 2007-04-19 | Still Wagner Gmbh & Co. Kg | Bedienpult mit Daumenjoystick für ein Flurförderzeug |
| CA2624709C (en) | 2005-10-27 | 2014-12-30 | Crown Equipment Corporation | Adjustable armrest mechanism for a materials handling vehicle |
| DE202006002969U1 (de) | 2005-11-08 | 2006-05-11 | Agco Gmbh | Steuereinrichtung für Nutzfahrzeuge |
| US7712571B2 (en) * | 2006-06-23 | 2010-05-11 | Caterpillar Inc. | Ergonomic machine control console |
| US7775317B1 (en) | 2006-07-17 | 2010-08-17 | Nmhg Oregon, Llc | Multi-directional operator controls for an industrial vehicle |
| EP1959329A1 (en) | 2007-02-19 | 2008-08-20 | AGCO GmbH | Tractor control means |
| DE102007034586A1 (de) | 2007-07-25 | 2009-01-29 | Daimler Ag | Bedieneinrichtung für ein Fahrzeug |
| JP5095754B2 (ja) | 2007-12-13 | 2012-12-12 | 株式会社小松製作所 | リッパの操作装置 |
| US8212770B2 (en) | 2008-02-11 | 2012-07-03 | Caterpillar Inc. | Joystick assembly for improved machine control |
| DE102008030554A1 (de) * | 2008-06-27 | 2009-12-31 | Still Wagner Gmbh | Bedienkonsole für ein Flurförderzeug |
| USD598023S1 (en) | 2008-07-10 | 2009-08-11 | Caterpillar Inc. | Joystick |
| CN201406303Y (zh) * | 2009-05-07 | 2010-02-17 | 浙江美科斯叉车有限公司 | 叉车的操纵装置 |
| DE102009034154A1 (de) | 2009-07-20 | 2011-02-03 | Claas Selbstfahrende Erntemaschinen Gmbh | Multifunktionsgriff |
| ES2559386T3 (es) | 2009-10-06 | 2016-02-11 | Bae Systems Plc | Empuñadura y reposabrazos de cabina de vuelo |
| DE102009052241A1 (de) | 2009-11-06 | 2011-05-12 | Eifelwerk Heinrich Stein Gmbh & Co Kg | Bedienvorrichtung |
| DE102010013169B4 (de) | 2010-03-27 | 2013-06-20 | Audi Ag | Bedienvorrichtung für ein Kraftfahrzeug |
| US8282051B2 (en) | 2010-06-15 | 2012-10-09 | Honeywell International Inc. | Armrest assembly |
| CN201882871U (zh) * | 2010-09-20 | 2011-06-29 | 广西柳工机械股份有限公司 | 多功能组合式操纵手柄 |
| DE102011016841A1 (de) | 2011-04-12 | 2012-10-18 | Kion Warehouse Systems Gmbh | Hochregalflurförderzeug, insbesondere Kommissionierflurförderzeug, mit einem Fahrersitz und seitlichen Armlehnen |
| USD695792S1 (en) | 2012-01-31 | 2013-12-17 | Sauer-Danfoss Aps | Joystick |
| GB2505413A (en) | 2012-08-28 | 2014-03-05 | Ge Aviat Systems Ltd | An input device with a touch screen, track ball and palm rest |
| US9751572B2 (en) | 2013-08-09 | 2017-09-05 | Yanmar Co., Ltd. | Working vehicle |
| USD767457S1 (en) * | 2015-02-06 | 2016-09-27 | Crown Equipment Corporation | Vehicle palm rest |
| USD775449S1 (en) * | 2015-02-06 | 2016-12-27 | Crown Equipment Corporation | Vehicle handhold element |
| KR102624793B1 (ko) * | 2016-02-05 | 2024-01-16 | 크라운 이큅먼트 코포레이션 | 자재 취급 차량을 위한 제어 요소 |
-
2016
- 2016-01-27 CN CN201680003608.7A patent/CN107074514B/zh active Active
- 2016-01-27 US US15/007,590 patent/US10053346B2/en active Active
- 2016-01-27 BR BR112017008489A patent/BR112017008489A2/pt not_active Application Discontinuation
- 2016-01-27 KR KR1020177016106A patent/KR102412206B1/ko active Active
- 2016-01-27 EP EP18162399.2A patent/EP3366637B1/en active Active
- 2016-01-27 AU AU2016211569A patent/AU2016211569C1/en active Active
- 2016-01-27 EP EP16717209.7A patent/EP3250496B1/en active Active
- 2016-01-27 WO PCT/US2016/015069 patent/WO2016123187A2/en not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6470809A (en) * | 1987-08-26 | 1989-03-16 | Porsche Ag | Manual operator for control valve |
| JPH0881197A (ja) * | 1994-09-13 | 1996-03-26 | Komatsu Forklift Co Ltd | リーチフォークリフトトラック用操縦桿 |
| US5890562A (en) * | 1996-08-16 | 1999-04-06 | Bt Prime Mover, Inc. | Control console for material handling vehicle |
| JPH11199192A (ja) * | 1998-01-12 | 1999-07-27 | Komatsu Forklift Co Ltd | リーチ式フォークリフトのアシストグリップ |
| EP1627848A2 (de) * | 2004-08-20 | 2006-02-22 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit ergonomisch angeordneten Bedienelementen |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200071570A (ko) * | 2018-12-11 | 2020-06-19 | 주식회사 두산 | 암레스트 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3366637B1 (en) | 2019-11-13 |
| CN107074514B (zh) | 2020-03-20 |
| US20160221808A1 (en) | 2016-08-04 |
| EP3250496A2 (en) | 2017-12-06 |
| AU2016211569C1 (en) | 2019-01-17 |
| CN107074514A (zh) | 2017-08-18 |
| EP3250496B1 (en) | 2019-01-23 |
| AU2016211569B2 (en) | 2018-10-11 |
| BR112017008489A2 (pt) | 2018-01-09 |
| US10053346B2 (en) | 2018-08-21 |
| EP3366637A1 (en) | 2018-08-29 |
| KR102412206B1 (ko) | 2022-06-23 |
| WO2016123187A3 (en) | 2016-12-22 |
| AU2016211569A1 (en) | 2017-04-20 |
| WO2016123187A2 (en) | 2016-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102412206B1 (ko) | 자재 취급 차량용 제어 모듈 및 팜 레스트 | |
| KR102404298B1 (ko) | 산업용 차량 암 레스트 | |
| US11661325B2 (en) | Control elements for materials handling vehicles | |
| US11828043B2 (en) | Manual input device and method | |
| US11167783B2 (en) | Operating head for an industrial truck | |
| EP3464781B1 (en) | Control center for an aerial device with control lever | |
| US11256282B2 (en) | Control lever device of industrial vehicle | |
| EP3947245B1 (en) | Control station for compact vehicles | |
| EP0655413B1 (en) | Drivers compartment at lifting trucks | |
| EP0545676A1 (en) | An ergonomic control system for swing reach vehicles | |
| JPH1091263A (ja) | 産業車両の操縦装置 | |
| CN215487593U (zh) | 用于物料搬运车的人体工程学操纵杆 | |
| US11530003B2 (en) | Industrial truck with a driver standing platform | |
| JP5873908B1 (ja) | フォークリフト | |
| JP2021011711A (ja) | 穿孔機械用操作装置 | |
| JP3948704B2 (ja) | 荷役車輌 | |
| JP2003020198A (ja) | 荷役車輌 | |
| JP2003048700A (ja) | オーダーピッカのレバー操作装置用アシストグリップ | |
| SE515878C2 (sv) | Styrspak för manövrering av en styranordning vid gaffeltruckar | |
| JP2004075215A (ja) | 荷役車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20170613 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20200812 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20211007 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20220420 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220620 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220621 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20250612 Start annual number: 4 End annual number: 4 |