EP1496009A1 - Suspension hydraulique - Google Patents
Suspension hydraulique Download PDFInfo
- Publication number
- EP1496009A1 EP1496009A1 EP04103115A EP04103115A EP1496009A1 EP 1496009 A1 EP1496009 A1 EP 1496009A1 EP 04103115 A EP04103115 A EP 04103115A EP 04103115 A EP04103115 A EP 04103115A EP 1496009 A1 EP1496009 A1 EP 1496009A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- hydraulic
- valve
- pressure
- control
- line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000725 suspension Substances 0.000 title claims description 68
- 239000010720 hydraulic oil Substances 0.000 claims abstract description 92
- 230000004913 activation Effects 0.000 claims description 3
- 230000035939 shock Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 9
- 230000001105 regulatory effect Effects 0.000 description 9
- 238000013016 damping Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 239000003921 oil Substances 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 230000003247 decreasing effect Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000033228 biological regulation Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 238000011161 development Methods 0.000 description 3
- 230000018109 developmental process Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 241001124569 Lycaenidae Species 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000007665 sagging Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 230000004936 stimulating effect Effects 0.000 description 1
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
- F15B21/008—Reduction of noise or vibration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/065—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/22—Hydraulic devices or systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
- E02F9/2207—Arrangements for controlling the attitude of actuators, e.g. speed, floating function for reducing or compensating oscillations
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/028—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the actuating force
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/021—Valves for interconnecting the fluid chambers of an actuator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/30525—Directional control valves, e.g. 4/3-directional control valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/3056—Assemblies of multiple valves
- F15B2211/30565—Assemblies of multiple valves having multiple valves for a single output member, e.g. for creating higher valve function by use of multiple valves like two 2/2-valves replacing a 5/3-valve
- F15B2211/3058—Assemblies of multiple valves having multiple valves for a single output member, e.g. for creating higher valve function by use of multiple valves like two 2/2-valves replacing a 5/3-valve having additional valves for interconnecting the fluid chambers of a double-acting actuator, e.g. for regeneration mode or for floating mode
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/31—Directional control characterised by the positions of the valve element
- F15B2211/3105—Neutral or centre positions
- F15B2211/3116—Neutral or centre positions the pump port being open in the centre position, e.g. so-called open centre
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/31—Directional control characterised by the positions of the valve element
- F15B2211/3144—Directional control characterised by the positions of the valve element the positions being continuously variable, e.g. as realised by proportional valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/327—Directional control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/405—Flow control characterised by the type of flow control means or valve
- F15B2211/40515—Flow control characterised by the type of flow control means or valve with variable throttles or orifices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/415—Flow control characterised by the connections of the flow control means in the circuit
- F15B2211/41527—Flow control characterised by the connections of the flow control means in the circuit being connected to an output member and a directional control valve
- F15B2211/41536—Flow control characterised by the connections of the flow control means in the circuit being connected to an output member and a directional control valve being connected to multiple ports of an output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/415—Flow control characterised by the connections of the flow control means in the circuit
- F15B2211/41581—Flow control characterised by the connections of the flow control means in the circuit being connected to an output member and a return line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/42—Flow control characterised by the type of actuation
- F15B2211/426—Flow control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/45—Control of bleed-off flow, e.g. control of bypass flow to the return line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/47—Flow control in one direction only
- F15B2211/473—Flow control in one direction only without restriction in the reverse direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/505—Pressure control characterised by the type of pressure control means
- F15B2211/50509—Pressure control characterised by the type of pressure control means the pressure control means controlling a pressure upstream of the pressure control means
- F15B2211/50518—Pressure control characterised by the type of pressure control means the pressure control means controlling a pressure upstream of the pressure control means using pressure relief valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/505—Pressure control characterised by the type of pressure control means
- F15B2211/50509—Pressure control characterised by the type of pressure control means the pressure control means controlling a pressure upstream of the pressure control means
- F15B2211/50545—Pressure control characterised by the type of pressure control means the pressure control means controlling a pressure upstream of the pressure control means using braking valves to maintain a back pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/515—Pressure control characterised by the connections of the pressure control means in the circuit
- F15B2211/5151—Pressure control characterised by the connections of the pressure control means in the circuit being connected to a pressure source and a directional control valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/52—Pressure control characterised by the type of actuation
- F15B2211/526—Pressure control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/52—Pressure control characterised by the type of actuation
- F15B2211/528—Pressure control characterised by the type of actuation actuated by fluid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/55—Pressure control for limiting a pressure up to a maximum pressure, e.g. by using a pressure relief valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6313—Electronic controllers using input signals representing a pressure the pressure being a load pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6336—Electronic controllers using input signals representing a state of the output member, e.g. position, speed or acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6346—Electronic controllers using input signals representing a state of input means, e.g. joystick position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7051—Linear output members
- F15B2211/7052—Single-acting output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7051—Linear output members
- F15B2211/7053—Double-acting output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/765—Control of position or angle of the output member
Definitions
- Hydraulic suspension especially for a boom of a Loader vehicle, with at least one hydraulic cylinder, which has at least one chamber, a control valve, which via at least one hydraulic line with the at least one Chamber is connected and which optionally a connection to a hydraulic oil pump and a hydraulic oil tank manufactures, and a connection line.
- DE 100 06 908 A1 discloses an agricultural Work machine, with the front a telescopic Boom is connected. This boom is from a hydraulic piston-cylinder unit raised or lowered.
- a Hydraulic circuit proposed which is a releasable Seat valve and an adjustable pressure control valve has, so that in a piston bottom side cylinder space a constant pressure is maintained and that Attachment always with one and the same bearing force on the Floor rests, regardless of whether the floor is level or uneven.
- the disadvantage is that the proposed hydraulic circuit only to a predeterminable Pressure limiting designed and thus in the form not for one active suspension system is suitable.
- a hydraulic suspension of the type mentioned indicate that overcomes the aforementioned problems become.
- an active suspension is created which are based on the load conditions of a cantilever of a loader vehicle reacts variably.
- a hydraulic suspension of the above mentioned type in which a control unit and a contain the position of the hydraulic cylinder indicating sensor is and in which the connecting line is a function of Sensor signal has controllable pressure limiting unit.
- the hydraulic cylinder can be a double-acting or act to a single-acting hydraulic cylinder.
- the suspension system according to the invention is therefore arbitrary Hydraulic cylinder can be used.
- the invention Suspension system is, for example, in a Telescopic cylinder used, whose individual telescope segments enclose a pressurizable chamber. By Pressurization of this chamber, the individual Telescopic segments of the hydraulic cylinder are extended.
- the pressure limit is the pressure in the chamber or in the Chambers of the hydraulic cylinder regulated so that at a Deflection of the hydraulic piston from an original position the Deflection movement dampened by the regulated pressure limitation is and the hydraulic piston back to its original position is moved.
- a hydraulic line which the at least one chamber with connects to the control valve, provides for a single-acting Hydraulic cylinder is a stroke-side hydraulic line dar a pressure increase in the pressure chamber of the single-acting Hydraulic cylinder, for example, caused by a Impact or sudden movement of the hydraulic piston increases the hydraulic oil pressure in the connection line such that the controllable pressure relief unit opens and excess Hydraulic oil drain into the hydraulic oil tank and the Retracting or compressing hydraulic piston can.
- a sensor signal is registered by the control unit, which leads to an altered pressure limitation in the controllable Pressure limiting unit performs, so that the pressure limiting unit closes again and from the hydraulic oil pump Subsequent hydraulic oil will increase the hydraulic piston again leaves.
- the hydraulic cylinder has a stroke side and a vertical chamber on.
- the two chambers over the Connecting line connected to each other.
- each chamber via a hydraulic line to the control valve connected.
- the control valve is designed such that one of the hydraulic lines connected to the hydraulic oil tank is when a hydraulic oil flow from the hydraulic oil pump in the other chamber takes place.
- the hydraulic oil pressure rises in the connection line such that the controllable Pressure limiting unit opens and excess hydraulic oil in the hydraulic oil tank or in the corresponding other chamber drain and the hydraulic piston on or extend or on or can rebound.
- the control unit registered a sensor signal, which changed to a Pressure limitation in the controllable pressure limiting unit leads, so that the pressure limiting unit closes again and from the hydraulic oil pump nachf submitdes hydraulic oil Hydraulic piston can rise or fall again.
- the connecting line contains a first shut-off valve, with which by opening and closing the hydraulic suspension can be activated or deactivated.
- a first shut-off valve with which by opening and closing the hydraulic suspension can be activated or deactivated.
- the first check valve opened and the control valve switched to a stroke position then there is a constantly circulating volume flow, the starting from the hydraulic oil pump through the control valve via the lift-side line to the lift-side chamber, via the Connecting line through the pressure limiting unit and through the check valve, to the lower side chamber and over the vertical line through the control valve flows into the tank.
- this turns out to be one-sided Hydraulic cylinder a constantly circulating flow, the starting from the hydraulic oil pump through the control valve via the hydraulic line into the chamber and over the Connecting line through the pressure limiting unit and through the check valve flows into the tank.
- the sensor supplies too Beginning a position signal for the hydraulic piston, which as to be observed reference value (setpoint) from the control unit is registered.
- setpoint reference value
- the pressure in the chamber changes or in the chambers of the hydraulic cylinder such that the Position of the hydraulic piston is changed until the original position of the hydraulic piston sets again or the difference between sensor signal and reference variable equal to or below a predefinable threshold lies.
- the connecting line preferably in double-acting hydraulic cylinders in the direction of the stroke-side chamber closing check valve.
- the check valve may be required if z. B. no check valve is contained in the connecting line. Since individual pressure limiting units, such as throttles or orifices, are permeable in both directions or seal leak-free other pressure limiting units in one direction, they can be secured by a check valve, so that no oil feed can take place in the connecting line from the lower-side chamber to the hub Carnegieen chamber.
- the pressure limiting unit is a controllable, preferably electrically adjustable pressure relief valve.
- the pressure relief valve Upon reaching a limit pressure on a stroke side of the hydraulic system, which is determined by the control position of the controllable pressure limiting valve, the pressure relief valve opens, so that the pressure on the lift side of the hydraulic system can drop. As soon as the limit pressure is undershot, the pressure relief valve closes again, so that the pressure on the lift side of the hydraulic system can rise again.
- the limit pressure can be varied or regulated by the control unit and thus the position of the hydraulic piston can be changed.
- the pressure limiting unit an adjustable or controllable Throttle. Similar to opening and closing the Pressure relief valve is at the adjustable or controllable throttle the passage cross-section of the throttle the control unit increases or decreases. As a result This regulation drops the pressure on the lifting side of the Hydraulic arrangement from or increases the pressure, so that As a result, the position of the hydraulic piston is variable.
- adjustable throttle is here, for example, a diaphragm, a adjustable flow control valve or another controllable or adjustable means for controlling the flow area considered.
- control valve has a closed position. In the Closed position is closed when the first check valve Hydraulic piston held in position.
- first check valve Hydraulic piston held in position.
- first check valve is for a double-acting Hydraulic cylinder realized a floating position in which the Hydraulic piston by external forces in its position changeable is or the boom by a on the hydraulic piston acting force can be lowered or raised.
- a load-holding valve arranged in the lift-side line a load-holding valve.
- the Load-holding valve provides a safety function and ensures a controlled lowering of the boom in one Accident, such as at a pipe break the lift side Management.
- Invention is between hydraulic pump and control valve one provided with a pressure relief valve and with the tank in Compound pressure limiting line arranged. at closed control valve is thereby ensured that at crimeier hydraulic pump, the hydraulic oil in the Tank is routed and a circulation of hydraulic oil is maintained.
- the pressure oil supply can For example, done by a constant pump, with a Pressure limitation by the pressure limiting line and the Pressure relief valve is ensured. In place of one Pressure oil supply by a constant pump is also a Pressure oil supply by means of a variable conceivable, the Frame of a hydraulic load-sense system is controlled.
- control unit regulates the controllable pressure limiting unit depending on a change from the variable Sensor signal and a setpoint signal resulting Differential signal, wherein the setpoint signal to the sensor signal at Activation of the hydraulic suspension corresponds and the Difference signal reaches a predetermined threshold.
- a second vertical line with a second check valve containing the vertical chamber with the tank combines.
- This embodiment of the invention provides a Demand-driven hydraulic suspension is because here the control valve is in a closed position and only opened when needed. The hydraulic suspension is active with the first and second shut-off valves open.
- the adjustable pressure relief valve used. Join one now Position change of the hydraulic piston such that the Hydraulic piston sinks, hydraulic oil can over the second Drain the vertical pipe to the tank.
- the control unit At the same time from the control unit generates a control signal, whereupon the control valve is opened and hydraulic oil for lifting the Hydraulic piston can flow.
- the hydraulic cylinder contains means for measuring load, in particular a pressure sensor.
- a load measurement for example, arranged by a hydraulic piston Pressure sensor allows the use of a variable throttle Place the controllable pressure relief valve demand-controlled hydraulic suspension.
- the Stress measurement may be needed to help with this closed control valve no hydraulic oil on the first and second check valve can drain and only when it reaches a specifiable limit pressure in one of the two chambers the first and second check valve are opened.
- a Boundary pressure is reached when, for example, a shock on the Cantilever acts and spring the hydraulic piston or should rebound.
- the load measuring device signals the Control unit, a limit pressure signal, whereupon the check valves be opened.
- the hydraulic piston will ever lowered or raised in the direction of impact, whereupon the Control unit generates a control signal, the controllable Throttle controls and the control valve opens so that Hydraulic oil can flow and the hydraulic piston its original position resumes. Will the original Reached position, the check valves and the Control valve closed.
- a hydraulic suspension according to the invention can be particularly advantageous on different types of boom vehicles, such as B. wheel loader, backhoe loader, telescopic loader, skid steer loader or on tractors with front loaders and the like be used.
- boom vehicles such as B. wheel loader, backhoe loader, telescopic loader, skid steer loader or on tractors with front loaders and the like be used.
- Other uses are z. B. at mowing tables of harvesters such as combine harvesters and Shredders.
- the volume flow supply normal, already on Vehicle existing control valves can be used. Own normal control valves a certain positive overlap to the valve spool to get a leak pouch.
- Such valves can in the Stationary hydraulics in the realization of control systems often not used, because the positive coverage during the changeover from work connection A to B due to construction Dead times leads to the construction of a control algorithm considerably more difficult or even preventable.
- For this Reason is usually set in the stationary hydraulics so-called servo valves, which have a low to no Have zero coverage and are very expensive and prone to failure.
- an inventive hydraulic suspension can be designed more cost-effective, as well as on conventional components without special Valve development be resorted to.
- the installation space for an active suspension system according to the invention is much smaller than passive suspension systems because For example, no voluminous hydraulic accumulator needed become.
- FIG. 1 shows a hydraulic cylinder 10 with a Hydraulic piston 12, which is used to raise and lower a boom a loader vehicle (both not shown) is used.
- Hydraulic cylinder 10 has a stroke-side chamber 14 and a lowering chamber 16 on.
- the lift-side chamber 14 is over a lift-side hydraulic line 18 and the lower-side chamber 16 via a vertical hydraulic line 20 with a electrically switchable control valve 22 is connected.
- the control valve 22 is via a drain line 24 and over a pressure limiting line 26 with a hydraulic oil tank 28th connected.
- a hydraulic oil pump 30 delivers hydraulic oil the control valve 22 in the respective hydraulic lines 18, 20th
- the control valve 22 is switchable in three positions, in one Closed position, in which no flow for both Hydraulic lines 18, 20 takes place, a stroke position, in the lift-side hydraulic line 18 with hydraulic oil is supplied, wherein the vertical-side hydraulic line 20 Hydraulic oil to the hydraulic tank 28 delivers, and a Senk ein in which the vertical hydraulic line 20 with Hydraulic oil is supplied, the hub side Hydraulic line 18 Hydraulic oil to the hydraulic tank 28th emits.
- the pressure limiting line 26 includes a pressure relief valve 32, which opens upon reaching a limit pressure and a flow from the hydraulic oil pump 30 to Hydraulic oil tank 28 allows.
- the hydraulic oil pump 30 can in this way, even when the control valve 22 is closed Promote hydraulic oil.
- the lift-side hydraulic line 18 includes a load-holding valve 34, which via a bypass line 36 a hydraulic oil flow in the direction of the hydraulic cylinder 10 permits. about Control lines 38, the load-holding valve in case of overload in Direction of the hydraulic oil tank 28 is opened, so that a Hydraulic oil flow to the hydraulic oil tank 28 may take place.
- a connecting line 40 is arranged, which a electrically switchable first check valve 42 contains.
- the first check valve includes a blocking position in which in both Directions no flow takes place and one Open position, in which a flow in both directions is possible.
- the connection line contains 40 a controllable pressure relief valve 44, which via a Control line 46 in the direction of the vertical hydraulic line 20 opens.
- the control pressure to open the Pressure relief valve can be controlled by a regulator 48 become.
- a position sensor 50 with a piston rod 52 connected to the hydraulic cylinder 10 and provides a the Position of the hydraulic piston 12 reproducing sensor signal to a control unit 54.
- the control unit 54 is provided with a Switching device 56 is connected, via which the control unit 54 and thus the hydraulic suspension can be activated.
- the hydraulic active suspension with a constantly flowing volume flow realized.
- This is the Control unit 54 activated via the switching device 56, wherein the control unit 54, the first check valve 42 opens and the control valve 22 switches to the stroke position.
- the Hydraulic oil pump 30 delivers the hydraulic oil through the Control valve 22 and the load-holding valve 34 for Hydraulic cylinder 10 of the boom.
- There is a build up certain pressure which by means of the controllable Pressure limiting valve 44 is set.
- a Adjusted pressure balance takes the hydraulic piston 12 a certain position, with excess, from the Hydraulic oil pump delivered hydraulic oil over the Pressure limiting valve 44 and the first check valve 42nd flows to the hydraulic tank.
- the basic operating principle is that the pressure on the stroke side of the hydraulic cylinder 10 thereby controlled is that a certain inflow of hydraulic oil to the lift side controlled to the hydraulic tank 28 can drain again. Of the Pressure is generated such that the hydraulic oil only against a certain resistance, which by the Pressure limiting valve 44 is specified to the hydraulic tank 28 can flow, this pressure is so high that he has a Load acting on the hydraulic cylinder 10, can counteract.
- the check valve 42 must be switched to its open position. If this is not the case, a pressure builds up on the lifting side of the hydraulic cylinder 10 and thus in the lifting-side chamber 14, which extends the piston and thus causes the boom to rise. About the controllable pressure relief valve 44, the pressure which is to prevail on the stroke side of the hydraulic cylinder 10, adjusted as needed by the control unit 54.
- the position of the boom or the position of the piston rod 52 and the hydraulic piston 12 is via the position sensor 50 constantly measured and serves as a controlled variable (actual value) for Adjusting the pressure on the lifting side of the hydraulic cylinder 10.
- This position can be measured in different ways Way.
- One possibility is shown in FIG. 1, in which the Position of the piston rod 52 is tapped. Also also suitable would be the lifting angle of the boom.
- control unit 54 Upon activation of the control unit 54, the control activated and the original position of the boom as to be observed reference variable (setpoint) held.
- the Control unit 54 determined via an integrated processor (not shown) from the reference variable and the current, measured control variable (actual value) the deviation (Control difference) from each other to on this basis the Adjustment of the pressure relief valve 54 by means of a Make manipulated variable.
- the pressure relief valve 54 is a set higher value, so that the pressure on the Lifting side of the hydraulic cylinder 10 increases and the Hydraulic piston 12 is extended.
- the pressure relief valve 54 is a Lowered value, so that the pressure on reduces the stroke side of the hydraulic cylinder and the Hydraulic cylinder is retracted.
- control valve 22 in his Opening cross section additionally depending on the current need is variably changed, so that more volume flow to Hydraulic cylinder 10 can flow. In the extreme case would be through a lowering also a reversal of the volume flow direction conceivable to the hydraulic piston 12 faster to enter.
- the actuation of the control valve 22 may be electrical, pneumatically or otherwise. Also is conceivable that the controllable pressure relief valve 44th pneumatically or hydraulically and not as in FIG is shown electrically driven. This can be at high Press and / or high flow rates be advantageous since then very high forces are applied by the adjusting mechanism have to.
- the hydraulic oil flowing through the lift-side pipe flows with open check valve 42 constantly on the throttle 58 for Hydraulic tank 28 down from.
- the throttle equation above the throttle 58 a certain pressure drop, the from the volume flow and the opening cross section of the throttle 58 depends, so that on the lifting side of the hydraulic cylinder 10th a certain dynamic pressure arises, which causes a sagging of the Cantilever prevented.
- the height of the back pressure can be determined by the flow rate of the Control valve 22 or via the adjustable opening cross-section the throttle 58 are changed.
- the position of the boom is also constantly measured and serves as a controlled variable (actual value) for setting the dynamic pressure to be measured on the lifting side of the hydraulic cylinder 10 can this position also in different ways and Wise. It would be conceivable, as shown in Figure 2, the position of Piston rod 52 or the lifting angle of the boom.
- control unit 54 If the control is activated, the control unit 54 generates analogous to the example of Figure 1, a manipulated variable, with the the opening cross section of the throttle 58 via a Throttle controller 60 regulated and / or a change in the Volumetric flow is caused by the control valve 22.
- the opening cross section of the throttle is 58th set to a smaller value, so that the Dynamic pressure on the lifting side of the hydraulic cylinder 10 is increased and the hydraulic piston 12 is extended. Also can in this case either only or simultaneously the Volume flow can be increased by the control valve 22 to the Increase dynamic pressure.
- control unit 54 determines that the boom is too high has been raised, the opening cross section of the throttle 58 set to a higher value, so that the back pressure reduced on the lifting side of the hydraulic cylinder 10 and the Hydraulic piston 12 is retracted. Also in this Case either only or simultaneously the volume flow from Control valve 22 can be reduced to the back pressure reduce.
- the electrically controllable throttle 58 as well also the first check valve 42 or the control valve 22, be controlled pneumatically or hydraulically.
- a second vertical-side line 62nd provided from the first vertical line 20 to Hydraulic tank 28 leads and with a second check valve 64th is provided, wherein the first and the second check valve 42, 64 may be identical.
- Embodiments are on-demand Suspension systems in which, unlike those in the Figures 1 and 2 illustrated embodiments, only at Requires a volume flow from the control valve 22 via a Load holding valve 34 to the hydraulic cylinder 10 of the boom flows.
- the control valve 22 is thus located in the closed position and will be provided by the Control unit 54 in the corresponding other positions connected.
- FIG. 3 shows the demand-controlled hydraulic suspension the electrically controllable pressure relief valve 44, as it can also be seen in Figure 1.
- control is activated by the switching unit 56 is the originating position of the boom as to be maintained Reference value (setpoint) and the control unit determined from this command and the current, measured position (controlled variable) the deviation (Control difference) from each other to on this basis the To perform regulation of the pressure relief valve 44 and the Height of the volume flow of control valve 22 by another Adjust manipulated variables.
- control unit 54 detects that the boom is too deep has dropped, the pressure relief valve 44 to a set higher value and the control valve 22 is opened, so that due to the flowing volume flow, the pressure on the Lifting side of the hydraulic cylinder 10 increases and the Hydraulic cylinder 10 is extended.
- the pressure relief valve 44 to a set lower value, so that the pressure on the Hubseite the hydraulic cylinder 10 is reduced and the Hydraulic piston 12 is retracted.
- the hydraulic oil used by the stroke side of the hydraulic cylinder 10 then over the Pressure limiting valve 44 and the first check valve 42 for Lower side of the hydraulic cylinder 10 flows, flows from there via the second check valve 64 to the hydraulic tank 28th
- Check valves 42, 64 are shown electrically switchable, However, they can also be pneumatically, hydraulically or on a be driven in another way.
- FIG. 1 Another embodiment is shown in FIG. The difference from the previous, shown in Figure 3 Embodiment is that, as in Figure 2 shown, a variable throttle 58 in place of adjustable pressure relief valve 44 is used. The however, the basic principle remains the same. In addition, however, a pressure sensor 66 is on the lift side of Hydraulic cylinder 10 is arranged, which is required to a Opening signal for the check valves 42, 64 to the Dispense control unit 54. Alternatively, you can do it differently kind of accelerometers, with the help of the Loads on the hydraulic cylinder 10 are measured can be used.
- the measurement of the load on the hydraulic cylinder 10 is required to determine when the check valves 42, 64 must be opened, otherwise on the variable throttle 58th the hydraulic oil from the stroke side of the hydraulic cylinder 10th can drain and the boom would sink.
- the control unit 54 determines one or more manipulated variables in the presence of control deviation in order to adjust the opening cross section of the throttle 58 and / or the change in the volume flow of the control valve 22. If the control unit 54 determines that the boom has fallen too low after opening the control valve 22 and the check valves 42, 64, the opening area of the throttle 58 is set to a smaller value, so that the dynamic pressure on the lift side of the hydraulic cylinder 10 increases and the hydraulic piston 12 is extended.
- the opening cross section of the throttle 58 set to a larger value, so that the Dynamic pressure on the lifting side of the hydraulic cylinder 10 decreases and the hydraulic piston 12 is retracted.
- a force on the stroke-side chamber 14th exercises the control unit 54 generates due to the Opening signal by the pressure sensor 66 is a manipulated variable, the to open the control valve 22 and the check valves 42, 64th leads, so that the hydraulic piston 12 can retract.
- the Hydraulic oil from the lifting side of the hydraulic cylinder 10 is displaced by the hydraulic piston 12 and flows over the Throttle 58 and the check valves 42, 64 from. Due to the displaced hydraulic oil volume, the boom drops, what again as a control difference is detected by the controller, whereupon the control unit 54 the opening cross section of the throttle 58th reduced. Due to the resulting increase in Back pressure and of the control valve 22 flowing Volumetric flow, the boom is raised again until the Control difference back to zero or to a presettable Threshold has decreased.
- the control unit 54 In a shock, which exerts a force on the lower-side chamber 16, the control unit 54 generates a manipulated variable due to the opening signal by the pressure sensor 66, which leads to the opening of the control valve 22 and the check valves 42, 64, so that the hydraulic piston 12 can extend .
- the hydraulic oil is relieved on the stroke side of the hydraulic cylinder 10 and an increase in volume of the stroke-side chamber 14 occurs because oil is displaced from the lower-side chamber 16 to the hydraulic tank 28 out.
- This raising of the boom is detected by the control unit 54 as a control difference and the control valve 22 is opened to fill by means of a volume flow, the resulting increase in volume on the stroke side of the hydraulic cylinder 10.
- FIGS. 5 to 7 show simplified embodiments of the invention Invention, which is essentially the same in FIGS. 1 and 2 correspond to described embodiments, only that the first check valve is omitted.
- Figure 5 shows the simplest of the illustrated Embodiments, in comparison to Figure 1, the first Lock valve 42 was saved.
- the illustrated in Figure 5 Pressure relief valve 44 is then not activated Suspension to a correspondingly high pressure limiting value regulated, so that the connecting line 40 substantially is closed, similar to how it cause a check valve 42 would. Only when activated suspension is the Pressure limiting valve 44 by the control unit 54 to a Control range, which is essentially one Control range according to the principle of operation Figure 1 corresponds. Incidentally, analogous to the already described operating principle for the embodiment in Figure 1 method.
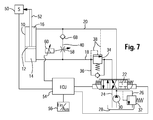
- FIG. 7 A further embodiment is shown in FIG. 7, in the comparison to Figure 2, the first check valve 42 by a check valve 68 has been replaced.
- This Embodiment provides compared to Embodiment according to Figure 2 is a variant, with the Switching operations for the first check valve 42 can be saved can.
- the throttle 58 shown in Figure 7 is then at not activated suspension on a correspondingly small, a high back pressure generating, passage cross section regulated or closed accordingly, so that the Passage cross section of the throttle is substantially zero and the connection line 40 is substantially closed, similar to how it would cause a check valve 42.
- the Check valve 68 thus contributes to a perfect Function of the load-holding valve 34 at. In a hydraulic Suspension without load-holding valve 34 could be on the Check valve 68 are omitted, because then always Hydraulic oil can flow from the hub Carnegieen chamber.
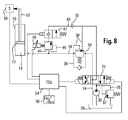
- FIG. 8 shows that that is essentially about the hydraulic circuit Figure 1 is.
- a single-acting hydraulic cylinder 10 is used, the hydraulic line 20 is omitted, so that the connecting line 40 now the lift-side chamber 14 of the Hydraulic cylinder 10 with a control valve 72 or over the Control valve 72 connects to the hydraulic oil tank 28.
- the Control valve 72 is designed such that it in the Lowering the connecting line 40 with the hydraulic oil pump 30 and the lift-side hydraulic line 18 with the Hydraulic oil tank 28 connects.
- a Check valve 70 is provided to lower the Hydraulic cylinder 10 is behind the connection to Control line 38 in the connecting line 40 . Only through the check valve 70, the hydraulic cylinder 10 can be lowered.
- the Control valve 72 is placed in lowered position, whereby the Hydraulic oil pump 30 due to the pump in the conveying direction closing check valve 70 has an opening pressure in the Control line 38 is generated, so that the load-holding valve 34th opened and the hydraulic oil from the chamber 14 through the Hubruce hydraulic line 18 in the hydraulic oil tank 28th can drain away.
- the check valve 42 is connected to the Embodiment with a single-acting lifting cylinder 10th adjusted, since here only one hydraulic oil flow in one direction too is expected.
- the changes can also be made in Compound with those shown in Figures 2 and 5 to 7 Hydraulic circuits are made, so the use a single-acting hydraulic cylinder 10 in the in the Figures 2 and 5 to 7 illustrated embodiments is also possible.
- FIGS. 8 and 9 illustrated embodiments, the operation of a Suspension for a single-acting hydraulic cylinder 10 to be discribed.
- a telescopic cylinder arranged as a hydraulic cylinder 10.
- FIG. 9 it is merely intended to show that also telescopically working hydraulic cylinder 10 can be used are.
- the hydraulic active Suspension for a single-acting hydraulic cylinder 10 both with a constantly flowing volume flow and with a demand-controlled volume flow can be realized.
- the control unit 54 activated via the switching device 56, wherein the Control unit 54, the check valve 42 opens and the Control valve 72 switches to the stroke position in which the Hydraulic oil pump 30 with the lift-side hydraulic line 18th is connected.
- the hydraulic oil pump 30 promotes that Hydraulic oil via the control valve 72 and over the Load holding valve 34 to the hydraulic cylinder 10 of the boom.
- There a certain pressure builds up, which by means of the adjustable pressure relief valve 44 is set.
- the basic mode of action therefore also corresponds to a single-acting hydraulic cylinder 10, whether conventional or formed as a telescopic cylinder, the in Figure 1 described principle, so that the pressure in the stroke side Chamber 14 of the single-acting hydraulic cylinder 10 thereby that controls a certain inflow of hydraulic oil to the lifting side (to the chamber 14) controlled to the hydraulic tank 28th can drain over the connecting line 40.
- a single-acting hydraulic cylinder 10 whether conventional or formed as a telescopic cylinder, the in Figure 1 described principle, so that the pressure in the stroke side Chamber 14 of the single-acting hydraulic cylinder 10 thereby that controls a certain inflow of hydraulic oil to the lifting side (to the chamber 14) controlled to the hydraulic tank 28th can drain over the connecting line 40.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- General Engineering & Computer Science (AREA)
- Fluid Mechanics (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Civil Engineering (AREA)
- Analytical Chemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- Combustion & Propulsion (AREA)
- Fluid-Pressure Circuits (AREA)
- Vehicle Body Suspensions (AREA)
- Fluid-Damping Devices (AREA)
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10330344 | 2003-07-05 | ||
| DE2003130344 DE10330344A1 (de) | 2003-07-05 | 2003-07-05 | Hydraulische Federung |
| DE10343742 | 2003-09-22 | ||
| DE10343742 | 2003-09-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1496009A1 true EP1496009A1 (fr) | 2005-01-12 |
| EP1496009B1 EP1496009B1 (fr) | 2007-09-05 |
Family
ID=33453881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP04103115A Expired - Lifetime EP1496009B1 (fr) | 2003-07-05 | 2004-07-01 | Suspension hydraulique |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6988363B2 (fr) |
| EP (1) | EP1496009B1 (fr) |
| AT (1) | ATE372296T1 (fr) |
| DE (1) | DE502004004847D1 (fr) |
| ES (1) | ES2289436T3 (fr) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1754836A2 (fr) | 2005-08-19 | 2007-02-21 | Deere & Company | Chargeur |
| EP1762535A2 (fr) | 2005-09-13 | 2007-03-14 | Deere & Company | Engin roulant du type muni d'un bras et procédé pour celui-ci |
| EP1897847A3 (fr) * | 2006-09-08 | 2009-06-17 | Deere & Company | Appareil de chargement |
| CN110319242A (zh) * | 2019-08-05 | 2019-10-11 | 安徽理工大学 | 一种基于双向扭转弹簧的旋转阀芯切换机构 |
| CN112010166A (zh) * | 2020-08-26 | 2020-12-01 | 江苏金风科技有限公司 | 叶片吊装工装及其液压系统 |
| CN113007159A (zh) * | 2021-02-09 | 2021-06-22 | 中国煤炭科工集团太原研究院有限公司 | 液压张紧方法、液压张紧装置和连续采煤机 |
| EP4344520A1 (fr) * | 2022-09-28 | 2024-04-03 | Deere & Company | Dispositif de commande d'un relevage hydraulique à trois points |
| EP4344523B1 (fr) | 2022-09-28 | 2025-07-02 | Deere & Company | Dispositif de commande d'un relevage hydraulique à trois points |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004348650A (ja) * | 2003-05-26 | 2004-12-09 | Toshiba Corp | 電子機器 |
| US7130721B2 (en) * | 2004-10-29 | 2006-10-31 | Caterpillar Inc | Electrohydraulic control system |
| DE102004056418B4 (de) * | 2004-11-23 | 2013-02-28 | Deere & Company | Hydraulische Anordnung |
| DE102005021887A1 (de) * | 2005-05-04 | 2006-11-16 | Kässbohrer Geländefahrzeug AG | Verfahren sowie Vorrichtung zur Fahrstabilitätserhöhung von Kraftfahrzeugen |
| DE102005038333A1 (de) * | 2005-08-11 | 2007-02-15 | Deere & Company, Moline | Hydraulische Anordnung |
| DE102005059240A1 (de) * | 2005-12-12 | 2007-06-14 | Linde Ag | Hydrostatisches Antriebssystem |
| SE531309C2 (sv) * | 2006-01-16 | 2009-02-17 | Volvo Constr Equip Ab | Styrsystem för en arbetsmaskin och förfarande för styrning av en hydraulcylinder hos en arbetsmaskin |
| JP4353190B2 (ja) * | 2006-02-27 | 2009-10-28 | コベルコ建機株式会社 | 建設機械の油圧回路 |
| US7845169B2 (en) * | 2006-10-17 | 2010-12-07 | Caterpillar Inc | Drift compensation control method for a machine |
| US8386133B2 (en) * | 2007-02-21 | 2013-02-26 | Deere & Company | Automated control of boom and attachment for work vehicle |
| JP5064843B2 (ja) * | 2007-03-08 | 2012-10-31 | 株式会社小松製作所 | 作業機ポンプの回転制御システム |
| DE102007051857B3 (de) * | 2007-10-30 | 2009-04-23 | Siemens Ag | Regeleinrichtung zum Positionsregeln einer Hydraulikzylindereinheit mit Linearisierungseinheit |
| RU2453658C2 (ru) * | 2007-11-21 | 2012-06-20 | Вольво Констракшн Эквипмент Аб | Чувствительная к нагрузке система, содержащая её рабочая машина и способ управления гидроприводом |
| WO2009067050A1 (fr) * | 2007-11-21 | 2009-05-28 | Volvo Construction Equipment Ab | Système de détection de charge, machine d'usinage comprenant le système et procédé pour commander une fonction hydraulique |
| CN101861436B (zh) * | 2007-11-21 | 2012-10-24 | 沃尔沃建筑设备公司 | 系统、包括该系统的工程机械及运输期间弹性支承工程机械的器具的方法 |
| EP2697441B1 (fr) * | 2011-04-15 | 2017-07-19 | Volvo Construction Equipment AB | Procédé et dispositif de réduction des vibrations dans un engin de travaux |
| US9187297B2 (en) * | 2011-05-13 | 2015-11-17 | Kabushiki Kaisha Kobe Seiko Sho | Hydraulic driving apparatus for working machine |
| WO2013190126A1 (fr) * | 2012-06-22 | 2013-12-27 | Drive System Design | Système de transmission |
| DE102012106185B3 (de) * | 2012-07-10 | 2013-11-21 | Fsp Fluid Systems Partners Holding Ag | Steueranordnung für ein hydropneumatisches Federungssystem sowie hydropneumatisches Federungssystem mit einer solchen Steueranordnung |
| US8833481B2 (en) | 2012-09-06 | 2014-09-16 | Cnh Industrial America Llc | System for controlling wing tool bars of an agricultural implement having an angle sensor |
| DE102012022030A1 (de) * | 2012-11-12 | 2014-05-15 | Deere & Company | Federungseinrichtung für eine beweglich gelagerte Fahrzeugachse |
| JP5661085B2 (ja) | 2012-11-13 | 2015-01-28 | 株式会社神戸製鋼所 | 作業機械の油圧駆動装置 |
| JP5661084B2 (ja) * | 2012-11-13 | 2015-01-28 | 株式会社神戸製鋼所 | 作業機械の油圧駆動装置 |
| CA2838639C (fr) * | 2013-10-23 | 2016-07-19 | Ms Gregson | Procede et systeme pour commander l'inclinaison d'une fleche transportee par un vehicule |
| WO2016189654A1 (fr) * | 2015-05-26 | 2016-12-01 | 日立建機株式会社 | Dispositif de mesure de charge pour machine de construction |
| EP3196623A1 (fr) * | 2016-01-25 | 2017-07-26 | Primetals Technologies Germany GmbH | Detection simple de fuite dans une unite de verin hydraulique |
| EP4497722A3 (fr) * | 2017-01-17 | 2025-04-23 | The Raymond Corporation | Systèmes de décharge de pression hydraulique variable et procédés pour un véhicule de manutention de matériaux |
| US11357177B2 (en) * | 2017-08-03 | 2022-06-14 | Firefly Automatix, Inc. | Sod harvester hydraulic system for actuating components with precise timing |
| DE102018104586A1 (de) * | 2018-02-28 | 2019-08-29 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit mindestens einem hydraulischen Masthubzylinder |
| US10724209B2 (en) | 2018-04-13 | 2020-07-28 | Deere & Company | Adjustable work implement |
| JP2019199881A (ja) * | 2018-05-14 | 2019-11-21 | 株式会社神戸製鋼所 | 作業機械の油圧駆動装置 |
| US10760599B2 (en) | 2018-06-29 | 2020-09-01 | Kti Hydraulics Inc. | Power units with manual override controls for hydraulic systems |
| DE102019209091A1 (de) * | 2019-06-24 | 2020-12-24 | Festo Se & Co. Kg | Verfahren zum Betreiben eines Fluidsystems, Fluidsystem und Computerprogrammprodukt |
| US11408144B2 (en) | 2019-08-29 | 2022-08-09 | Deere & Company | Variable float and variable blade impact |
| ZA202110395B (en) * | 2020-12-30 | 2023-11-29 | Manitou Italia Srl | Telehandler with facilitated alignment adjustment |
| US12428811B2 (en) * | 2021-11-19 | 2025-09-30 | Robert Bosch Gmbh | Construction machine with active ride control |
| EP4365023B1 (fr) | 2022-11-07 | 2025-09-17 | Hiab AB | Équipement de travail ayant des capacités d'empêcher le flambage d'un cylindre hydraulique |
| EP4585433A1 (fr) * | 2024-01-09 | 2025-07-16 | Volvo Construction Equipment AB | Système de suspension à base de fluide d'un véhicule |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4221943A1 (de) * | 1991-09-04 | 1993-03-18 | Orenstein & Koppel Ag | Hydraulikanlage fuer mit arbeitsgeraeten versehene arbeitsmaschinen |
| EP0816576A1 (fr) * | 1996-06-28 | 1998-01-07 | KABUSHIKI KAISHA KOBE SEIKO SHO also known as Kobe Steel Ltd. | Machine de construction |
| DE10006908A1 (de) | 2000-02-16 | 2001-08-23 | Caterpillar Sarl Genf Geneva | Hydraulische Kolbenzylindereinheit für landwirtschaftliche Arbeitsmaschinen |
| DE10046546A1 (de) | 2000-09-19 | 2002-03-28 | Putzmeister Ag | Großmanipulator mit Schwingungsdämpfer |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4643074A (en) * | 1985-03-07 | 1987-02-17 | Vickers, Incorporated | Power transmission |
| EP0378129B1 (fr) * | 1989-01-13 | 1994-11-30 | Hitachi Construction Machinery Co., Ltd. | Système hydraulique pour le vérin de la flèche d'une machine de construction |
| JPH0662268B2 (ja) * | 1989-04-21 | 1994-08-17 | 株式会社神戸製鋼所 | 移動式クレーンの変位抑制装置 |
| JPH0815998B2 (ja) * | 1989-10-14 | 1996-02-21 | 株式会社神戸製鋼所 | ホイール式クレーンの振動抑制装置 |
| DE4105459A1 (de) | 1991-02-21 | 1992-08-27 | Heilmeier & Weinlein | Hydraulische steuervorrichtung |
| DE4129509C2 (de) | 1991-09-05 | 1994-06-16 | Rexroth Mannesmann Gmbh | Hydraulische Steueranordnung für Baumaschinen |
| DE4231399A1 (de) | 1992-08-20 | 1994-02-24 | Rexroth Mannesmann Gmbh | Hydraulische Steuereinrichtung |
| DE4402580B4 (de) | 1994-01-28 | 2006-12-14 | Linde Ag | Hydraulisches Antriebssystem |
| JPH0812546A (ja) | 1994-06-30 | 1996-01-16 | Toray Dow Corning Silicone Co Ltd | 日焼け防止用化粧料 |
| US5666806A (en) * | 1995-07-05 | 1997-09-16 | Caterpillar Inc. | Control system for a hydraulic cylinder and method |
| US5622226A (en) * | 1996-01-29 | 1997-04-22 | Caterpillar Inc. | Method for controlling bounce of a work implement |
| US5890870A (en) | 1996-09-25 | 1999-04-06 | Case Corporation | Electronic ride control system for off-road vehicles |
| US6422804B1 (en) | 2000-02-18 | 2002-07-23 | Deere & Company | Inertia load dampening hydraulic system |
-
2004
- 2004-07-01 DE DE502004004847T patent/DE502004004847D1/de not_active Expired - Lifetime
- 2004-07-01 AT AT04103115T patent/ATE372296T1/de not_active IP Right Cessation
- 2004-07-01 EP EP04103115A patent/EP1496009B1/fr not_active Expired - Lifetime
- 2004-07-01 ES ES04103115T patent/ES2289436T3/es not_active Expired - Lifetime
- 2004-07-02 US US10/884,716 patent/US6988363B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4221943A1 (de) * | 1991-09-04 | 1993-03-18 | Orenstein & Koppel Ag | Hydraulikanlage fuer mit arbeitsgeraeten versehene arbeitsmaschinen |
| DE4221943C2 (de) | 1991-09-04 | 1996-01-25 | Orenstein & Koppel Ag | Hydraulikanlage für mit Arbeitsgeräten versehene fahrbare Arbeitsmaschinen |
| EP0816576A1 (fr) * | 1996-06-28 | 1998-01-07 | KABUSHIKI KAISHA KOBE SEIKO SHO also known as Kobe Steel Ltd. | Machine de construction |
| DE10006908A1 (de) | 2000-02-16 | 2001-08-23 | Caterpillar Sarl Genf Geneva | Hydraulische Kolbenzylindereinheit für landwirtschaftliche Arbeitsmaschinen |
| DE10046546A1 (de) | 2000-09-19 | 2002-03-28 | Putzmeister Ag | Großmanipulator mit Schwingungsdämpfer |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1754836A2 (fr) | 2005-08-19 | 2007-02-21 | Deere & Company | Chargeur |
| DE102005039251A1 (de) * | 2005-08-19 | 2007-02-22 | Deere & Company, Moline | Ladegerät |
| EP1754836A3 (fr) * | 2005-08-19 | 2008-07-16 | Deere & Company | Chargeur |
| EP1762535A2 (fr) | 2005-09-13 | 2007-03-14 | Deere & Company | Engin roulant du type muni d'un bras et procédé pour celui-ci |
| EP1762535A3 (fr) * | 2005-09-13 | 2009-01-07 | Deere & Company | Engin roulant du type muni d'un bras et procédé pour celui-ci |
| US7845896B2 (en) | 2006-09-08 | 2010-12-07 | Deere & Company | Loader |
| EP1897847A3 (fr) * | 2006-09-08 | 2009-06-17 | Deere & Company | Appareil de chargement |
| CN110319242A (zh) * | 2019-08-05 | 2019-10-11 | 安徽理工大学 | 一种基于双向扭转弹簧的旋转阀芯切换机构 |
| CN110319242B (zh) * | 2019-08-05 | 2024-03-26 | 安徽理工大学 | 一种基于双向扭转弹簧的旋转阀芯切换机构 |
| CN112010166A (zh) * | 2020-08-26 | 2020-12-01 | 江苏金风科技有限公司 | 叶片吊装工装及其液压系统 |
| CN112010166B (zh) * | 2020-08-26 | 2022-09-06 | 江苏金风科技有限公司 | 叶片吊装工装及其液压系统 |
| CN113007159A (zh) * | 2021-02-09 | 2021-06-22 | 中国煤炭科工集团太原研究院有限公司 | 液压张紧方法、液压张紧装置和连续采煤机 |
| EP4344520A1 (fr) * | 2022-09-28 | 2024-04-03 | Deere & Company | Dispositif de commande d'un relevage hydraulique à trois points |
| EP4344520B1 (fr) | 2022-09-28 | 2025-07-02 | Deere & Company | Dispositif de commande d'un relevage hydraulique à trois points |
| EP4344523B1 (fr) | 2022-09-28 | 2025-07-02 | Deere & Company | Dispositif de commande d'un relevage hydraulique à trois points |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2289436T3 (es) | 2008-02-01 |
| DE502004004847D1 (de) | 2007-10-18 |
| EP1496009B1 (fr) | 2007-09-05 |
| US6988363B2 (en) | 2006-01-24 |
| ATE372296T1 (de) | 2007-09-15 |
| US20050011190A1 (en) | 2005-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1496009B1 (fr) | Suspension hydraulique | |
| EP1450048B1 (fr) | Agencement de vanne | |
| DE102004056418B4 (de) | Hydraulische Anordnung | |
| EP1918136B1 (fr) | Système de ressort | |
| EP2031256B1 (fr) | Dispositif de levage et procédé de commande d'un dispositif de levage | |
| DE102004012382B4 (de) | Hydraulische Anordnung | |
| EP1911614B1 (fr) | Système de ressort | |
| EP3914463B1 (fr) | Système d'amortisseur à ressort | |
| EP2064948A2 (fr) | Rampe de pulvérisation | |
| WO1999029970A1 (fr) | Systeme de commande hydraulique pour engin mobile, notamment pour chargeuse sur roues, afin d'amortir les oscillations dues au tangage | |
| DE68908846T2 (de) | Hydraulisches Fahrzeugaufhängungssystem. | |
| DE68918930T2 (de) | Vorrichtung zur Unterdrückung von Vibrationen für Baumaschinen auf Rädern. | |
| DE102005038333A1 (de) | Hydraulische Anordnung | |
| DE102005033154A1 (de) | Hydraulische Anordnung | |
| DE10330344A1 (de) | Hydraulische Federung | |
| DE3883690T2 (de) | Hydraulisches Antriebssystem. | |
| EP1762535B1 (fr) | Engin roulant du type muni d'un bras et procédé pour celui-ci | |
| EP1902874A1 (fr) | Système de châssis actif | |
| EP2952419B1 (fr) | Élément ressort amortisseur pour la suspension de cabine de véhicules | |
| DE2517810A1 (de) | Fahrzeug | |
| EP0719947B1 (fr) | Circuit de détection de charge | |
| DE102005039251A1 (de) | Ladegerät | |
| EP2685109B1 (fr) | Agencement de commande pour un système de suspension hydropneumatique et système de suspension hydropneumatique doté d'un tel agencement de commande | |
| DE102004032652A1 (de) | Hydraulische Federung | |
| EP1606988B1 (fr) | Dispositif d'adaptation à la surface du sol |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL HR LT LV MK |
|
| 17P | Request for examination filed |
Effective date: 20050712 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 502004004847 Country of ref document: DE Date of ref document: 20071018 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20071015 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2289436 Country of ref document: ES Kind code of ref document: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071205 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 |
|
| 26N | No opposition filed |
Effective date: 20080606 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080701 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080306 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070905 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20140619 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20140717 Year of fee payment: 11 Ref country code: ES Payment date: 20140728 Year of fee payment: 11 Ref country code: GB Payment date: 20140729 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20140723 Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502004004847 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20150701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150701 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160202 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150701 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20160331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150731 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20160928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150702 |