JP3861302B2 - 歯科用治療椅子の姿勢制御装置 - Google Patents
歯科用治療椅子の姿勢制御装置 Download PDFInfo
- Publication number
- JP3861302B2 JP3861302B2 JP23882395A JP23882395A JP3861302B2 JP 3861302 B2 JP3861302 B2 JP 3861302B2 JP 23882395 A JP23882395 A JP 23882395A JP 23882395 A JP23882395 A JP 23882395A JP 3861302 B2 JP3861302 B2 JP 3861302B2
- Authority
- JP
- Japan
- Prior art keywords
- posture
- posture position
- treatment
- circuit
- switch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000011282 treatment Methods 0.000 title claims description 41
- 238000011369 optimal treatment Methods 0.000 claims description 25
- 230000001225 therapeutic effect Effects 0.000 claims description 6
- 230000036544 posture Effects 0.000 description 90
- 238000003860 storage Methods 0.000 description 16
- 238000001514 detection method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 6
- 238000007493 shaping process Methods 0.000 description 6
- 238000003825 pressing Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000012937 correction Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images





Landscapes
- Accommodation For Nursing Or Treatment Tables (AREA)
Description
【発明の属する技術分野】
本発明は、歯科用治療椅子に係わり、特に歯科用治療椅子の姿勢制御装置に関する。
【0002】
【従来の技術及び発明が解決しようとする課題】
(1)従来の歯科用治療椅子の姿勢制御において、各ポジションスイッチにより設定した基本姿勢をフットスイッチ等によりさらに微調整し最適姿勢治療位置を設定した後、次の例えばうがい姿勢等の作業姿勢を選択し、再び前の最適治療姿勢位置に復帰させるには、次の作業姿勢を設定するポジションスイッチを押した時点において、前記最適治療姿勢位置を記憶させ、その後リセットスイッチにより前姿勢に復帰させていた。しかし、前記最適治療姿勢位置の完了記憶位置は、姿勢制御駆動装置における作動工程上のタイムラグ分が加わっており、その時間の作動分が追加になるので、実際の位置は設定位置より若干オーバーしてしまう。この位置が前記作業姿勢を設定するポジションスイッチを押すことによって記憶されてしまうため、作業姿勢設定ポジションと前最適治療姿勢位置間を反復して作動させると、前記オーバー分のずれが加算蓄積され、設定位置との間のずれが倍加増大してくる。
(2)前記最適治療姿勢位置からリセット位置に作動させるときに、要緊急停止事態が発生した場合、リセットスイッチ操作以前は前記最適治療姿勢位置の記憶がなされていないので、この間に要緊急停止事態が発生すると、作動を一旦停止させた後、最適治療姿勢位置に復旧させる動作を再開させた場合、椅子の位置は最適治療姿勢位置を設定する以前の基本姿勢まで戻ってしまうために、前記最適治療姿勢位置を再度設定する手間が必要であった。
【0003】
【問題を解決するための手段】
本発明は上記の問題を下記に示す装置によって解決するものである。
「歯科治療椅子の座席シート及び背板を所定の位置に設定でき、かつ、緊急停止手段を備えた歯科用治療椅子において、基本姿勢位置設定後、
(1)さらに微調整で最適治療姿勢位置を設定する工程と、
(2)次の作業姿勢位置を設定する工程と、
(3)その後前記最適治療姿勢位置に戻す工程と、
上記(2)、(3)の工程を繰り返して採用する際に、
(3)の工程で前記最適治療姿勢位置を再現させる制御手段が、
(1)の工程で微調整した最適治療姿勢位置をリアルタイムに記憶させ、(2)の工程で作業位置を設定した後、(3)の工程で前記最適治療姿勢位置に戻し、再度作業姿勢位置の設定を行う際に、前記(1)の工程で記憶された最適治療姿勢位置をその都度更新して記憶させる機能を備えるものであり、
前記作業姿勢位置及び最適治療姿勢位置間で繰り返し作動を行っても、最適治療姿勢位置に前記繰り返し作動によるずれの倍加増大が生ずること無く、最適治療姿勢位置を忠実に再現することができ、また作業姿勢位置設定動作途中において要緊急停止事態が発生した際に、その動作を一旦停止させた後、最適治療姿勢位置に復旧させる動作を行うことにより、前記最適治療姿勢位置に自動的に復帰させることができるようにしたことを特徴とする歯科用治療椅子の姿勢制御装置。」
なお、上記本発明における作業姿勢位置としては、通常うがい位置及びリセット位置が採用される。
【0004】
【発明の実施の形態】
以下本発明の実施の形態をブロック図、動作のフローチャート、回路図に基づいて詳細に説明する。
【0005】
【実施例】
本発明の歯科用治療椅子の姿勢制御装置の機構における背板の起立、傾斜、及び座席シートの上昇、下降は、油圧装置、空気圧装置、電動装置等によって行われるが、広く使われている油圧機構におけるシリンダの作動によって行われる事例により説明する。
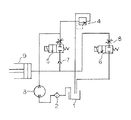
図1は油圧シリンダを作動させる基本回路図を示し、1はオイルタンク、2はフイルタ、3はモーターポンプ、4はリリーフ弁、5は椅子背板起立用2ポート電磁式切替弁、6は背板傾斜用2ポート電磁式切替弁、7は逆止め弁、8は流量調節弁、9は油圧シリンダを示す。
問題点である姿勢制御駆動装置における作動工程上のタイムラグは以下のようにして発生する。
周知のように油圧機構の動作は、モーターポンプ3が作動し、オイルタンク1からオイルを吸込み、他方から吐出する。この流量の調整は、単位時間内にシリンダ9に流入する油量を調整し、シリンダの作動に適した速度を与える流量制御弁8によって行なわれる。このときポンプから吐出された油量のうち余分なオイルはリリーフ弁4を通してタンク1に戻す。
背板シートを起立させる場合は、起立用2ポート電磁式切換弁5に通電してオイルを油圧シリンダ9に送り込みシリンダを前進させ起立させる。
背板シートを伏動傾斜させる場合は、傾斜用2ポート電磁式切換弁6に通電して背板シート自重及び着座患者体重による押圧力によって油圧シリンダ9内のオイルを排出してシリンダを後退させ傾斜させる。
【0006】
(a)上記のような機構の姿勢制御駆動装置において、例えば、前述した現姿勢以前の姿勢を実現させるための従来の動作のフローチャートを図2に示す。
図においては、ポジションスイッチを選択し、押した後の動作を説明する。
以前の位置を背板を傾斜させた位置とし、これをセットポジション(微調整による最適治療姿勢位置)と仮定すると、この位置はすでに記憶されているので、「セットポジション完了」の次に、「電磁弁6の通電を閉」とし停止指令を出す。またこれは、タイミング的には制御上のポジションである。上記により電磁弁内の「プランジャは閉」となり次に「油圧回路も閉」となって動きは停止する。しかし、上記した一連の作動工程において、歯科の治療上姿勢制御の速度は遅く設定してあり、かつ、機械的な慣性モーメント、オイルの特性等によって、電磁弁6の通電を閉とし停止指令を出してから、油圧回路も閉となって動きが停止する迄に300mS〜400mSの時間を要し、「制御上のポジション」と「実際のポジション」との間では、300mS〜400mSのタイムラグが生じており、その分制御姿勢の位置ずれを生ずる。
従って「うがい又はリセット操作」即ち次のポジションスイッチを押すことにより、「セットポジション記憶」即ち前回のセットポジション(微調整による最適治療姿勢位置)姿勢を記憶させる手法では、前述したようにずれが生じている実際のポジションを記憶することとなり、反復動作を繰り返すごとにずれが倍加蓄積され、大きなずれを生ずる。
従来技術においては、このずれをさらに検出し再修整を行う、あるいは、検出のタイミングをタイムラグを想定して前にずらせる等でずれを修整する手法もあるが、制御姿勢の位置が一定であり、かつ、制御速度は遅いので前記修整は複雑となり修整制御装置の製作上問題があった。
(b)次に、前の姿勢に復帰させる中途で緊急停止の発生した時の従来の動作を、フローチャート図4によって説明する。
(イ)工程部分に示す如く、前の姿勢に復帰させる中途で要緊急停止の発生した時、前記「リセット操作」即ち次の作業姿勢のポジションスイッチを押し、前回の「セットポジション記憶」を行った後、「リセット動作」が行われて「リセット動作完了」となる。従って、記憶以前の時点で要緊急停止が発生し、一旦緊急停止が行われると、前記セットポジション(微調整による最適治療姿勢位置)に復帰することはできなくなり、再開するには再度リセット操作を行う必要があった。
【0007】
本発明における上記の問題解決の手段は、前述したように、
(A)姿勢制御機構上のタイムラグはそのまま許容し、前の設定ポジションの設定位置の検出記憶を、ずれを生じない段階の制御上のポジションにおいて行うことによって、現姿勢と前姿勢間の移動を繰返してもずれを生じない方式とした。即ち、前記制御上のポジションと、若干のずれが加わった実際上のポジションの関係位置は、少なくとも一日の診療の時間内においては一定であるため、本発明では常に変化のない前記制御上のポジションを記憶させること、ついで作動させることにより、現姿勢と前姿勢間の移動を繰返しても、実際上のポジションのずれは生じないようにした。
上記の手段をフローチャートを図3によって説明する。
図3において、ポジションスイッチを選択し、押した後の動作は、以前の位置を背板を傾斜させた位置とし、これをセットポジションと仮定すると、この位置はすでに記憶されているので、「セットポジション完了」の次に、「電磁弁6の通電を閉」とし停止指令を出す。またこれは、タイミング的には制御上のポジションである。次に1mS以下の早いタイミングで上記制御上のポジション「セットポジション記憶」を行い、その後電磁弁内の「プランジャは閉」となり、次に「油圧回路も閉」となって動きは停止する。従って実際には図2で前述したような作動工程上のタイムラグが(300〜400mS)あっても、反復による実際上のポジションのずれの倍加増は生じない。
(B)前記の如く図5の(イ)工程により要緊急停止の事態が発生し、一旦作動を停止させ再作動させる場合もセットポジションの記憶(2)(微調整による最適治療姿勢位置)は、リセット操作(作業姿勢位置)以前に終了しているため、直ちにその位置に復帰させることが可能である。
上記の手段を本発明によるフローチャート図5によって説明する。
図において、前記「セットポジション記憶(2)」は、「リセット操作」以前に完了しており、「リセット操作」後、直ちに「リセット動作」となり「リセット動作完了」となる。従ってリセット動作中に緊急停止を行っても、「セットポジション記憶(2)」が失われることがなく、再開後直ちにその位置に復帰できる。
【0008】
次ぎに前記ポジションスイッチの操作による前記(a)及び(b)項の作用を、従来動作のフローチャート図4及び、本発明のフローチャート図5に基づいてさらに詳しく説明する。
図4は従来の手法におけるフローチャートの事例を示す。図において、「オート1操作」(ポジションスイッチ)を押すと、「オート1動作」(座席シート上昇、背板傾斜)が行われ、「オート1動作完了」となる。次に最適治療姿勢位置設定するため「手動位置修整」を行う場合はフットスイッチ等による「手動動作」を行い、次にリセットボタンによる「リセット操作」(うがい位置、又は、リセット位置)を行うと前記手動位置修整後の「セットポジション記憶」が行われ、背板が起立する「リセット動作」が行われて、「リセット動作完了」となる。この場合前述したように「セットポジション記憶」が行われ記憶されているセットポジションの位置は、300〜400mS経過によるずれを生じている実際の位置であり、従って現ポジション(例えばリセット動作の完了)と前ポジション(手動動作完了時)間をn回反復作動すると、ずれが蓄積され、例えば300〜400mS×n倍となって大きなずれを生ずることになる。
【0009】
次ぎに本発明事例のフローチャート図5に示す。
「オート1操作」(ポジションスイッチ)を押すと、「オート1動作」(座席シート上昇、背板傾斜)が行われ、「オート1動作完了」となり、直ちに「セットポジション記憶(1)」がなされる。次に「手動位置修整」を行う場合は、「手動動作」を行い、動作が完了した時点で直ちに「セットポジション記憶(2)」がなされる。この記憶の位置は最初のセットポジション(セットポジション記憶(1))の位置に、手動修整を行ったセットポジション(セットポジション記憶(2))位置を付加した位置である。
次にリセットボタンによる「リセット操作」(うがい位置、又はリセット位置)を行うと、「リセット動作」が行われて、「リセット動作完了」となる。上記における「セットポジション記憶(2)」の位置は前述したように制御上の位置であり「リセット操作」以前に記憶されている。従って、現ポジション(リセット動作完了)と前ポジション(手動動作完了時)間を反復作動しても、ずれが蓄積されることはなく、同じ制御姿勢を実現することができる。
なお、上記(b)の従来技術における要緊急停止事態発生時の対応は、図4のフローチャートで説明したとおりである。
また、本発明における要緊急停止事態発生時の対応は、前記(B)において図5のフローチャートで説明したとおりである。
【0010】
次に本発明における歯科用治療椅子の姿勢制御装置のブロック図と作用を詳述する。
図6は本装置のブロック構成図を示す。図において、
▲1▼.姿勢制御の駆動機構:これは図1に示すとおりの油圧方式を採用している。原理は前述の通りであるが、背板の起立12は、起立用の電磁弁を開き、オイルポンプを駆動して油圧シリンダーに供給して作動させ、座席シートの上昇10は、上昇用の電磁弁を開き、オイルポンプを駆動して油圧シリンダーに供給して作動させ、背板の傾斜13及び座席シートの下降11は、それぞれの当該電磁弁を開いてオイルポンプを駆動して油圧シリンダーに供給して作動させ行っている。制御速度は歯科治療に適するよう遅く設定しており、また作動工程におけるタイムラグを許容している。
▲2▼.姿勢位置の検出:作動に連動して上下の高さ、傾斜の角度をポテンショメーター30を使用して電気量に換算し出力する治療椅子位置検出は、座席リフト位置検出回路31と、座席バック位置検出回路32からのアナログ出力をデジタルに変換するA/Dコンバータ33によってなり、現在位置情報が出力される。
▲3▼.メモリー:メモリー40はA/Dコンバータ33により現在位置の信号を入力し、メモリースイッチ70からのメモリーの書込みパルスが入力された時点における上記現在位置信号を指定のアドレスに記憶保持し、他のアドレスバスのコマンドにより対応するアドレスの情報を読み出している。
▲4▼.マグニチュードコンパレータ:マグニチュードコンパレータ50はA/Dコンバータ33 からの現在位置信号と、メモリー40からの記憶位置データとを比較し、両者の差を出力している。
▲5▼.コマンド:メモリー40に治療椅子位置検出部からの現在位置情報の書込みを行う書込回路60と、メモリー40にアドレス信号を出力して書込みとリードのアドレスを指定して、これに対応するコマンド位置信号を、マグニチュードコンパレータ50対しリードすることをコマンドするアドレスラッチ回路61とを備えたコマンド回路で、さらにこのコマンド回路は、コマンドを入力する後記複数のポジションスイッチと、スイッチ相互間および書込みコマンド回路とを接続するコマンドOR回路62、63、65、及び波形整形回路64とを備えている。
▲6▼.駆動制御:姿勢制御を行う駆動制御は、マグニチュードコンパレータ50からの出力を受ける駆動OR回路23よりの出力を一方の入力とし、他方に緊急停止スイッチ76からの信号を入力する駆動AND回路24を介し、セットラッチ26のリセットに接続されている。また、駆動OR回路23の出力及び手動スイッチの駆動OR回路22の出力を受ける駆動OR回路25からのネガティブエッジの出力を波形整形回路64に送り、この出力は前記OR回路62、63の一端に送られ、複数のポジションスイッチからのポジション信号又は、波形整形回路64の出力は書込み回路60あるいはアドレスラッチ61に入力され、各ポジションが即時メモリー40に書込まれ記憶される。また、セットラッチ26からの出力と、マグニチュードコンパレータ50からの出力を受ける駆動AND回路18、19、20、21の出力と、駆動OR回路14、15、16、17の一端に入力され、このOR回路の他端は手動スイッチ傾斜77、起立78、下降79、上昇80の各スイッチより入力され、いずれかの信号をリミットスイッチ90、91、92、93を介して上昇10、下降11、起立12、傾斜13の各駆動制御回路に送り、治療椅子の姿勢制御を各動作に応じて行っている。
【0011】
次に、本発明装置の作用をブロック図に基づいて説明する。
前記図6のブロック図における複数のポジションスイッチは、メモリースイッチ70、オート1セットスイッチ71、オート2セットスイッチ72、うがいリセットスイッチ73、リセットスイッチ74、ソフトメモリスイッチ75、から構成され、手動スイッチ(フットスイッチ)は起立スイッチ78、傾斜スイッチ77、上昇スイッチ80、下降スイッチ79によって構成されている。
施術者が診療に際して、その施術者に最適治療姿勢位置を前記手動スイッチ77、78、79、80を操作して設定した後に、メモリースイッチ70を押し、さらにオート1セットスイッチ71、又はオート2セットスイッチ72を押してまず、基本姿勢であるオート1又は、オート2の位置を設定する。この場合の作用は
(1)オートセット1スイッチ71を押すとアドレスラッチ回路61が対応する入力端にHレベルの信号が出力され、アドレスラッチ回路61はオートセット1スイッチ71のアドレスコマンドを、メモリー部40に対して行い、また、メモリースイッチ70を押すとHレベル信号がOR回路62を介して書込み回路60に出力される。また当該回路は治療椅子位置検出部からの現在位置情報を指定のアドレスへ書込むことをコマンドする。
オート2セットスイッチ72を押すと、アドレスラッチ回路61が対応する入力端にHレベルの信号が出力され、アドレスラッチ回路61はオート2セットスイッチ72のアドレスコマンドを、メモリー部40に対して行い、また、メモリースイッチ70を押すとHレベル信号がOR回路62を介して書込み回路60に出力される。また当該回路は治療椅子位置検出部からの現在位置情報を指定のアドレスへ書込むことをコマンドする。
(2)上記のようにしてメモリー40にオート1、及びオート2の基本姿勢が書込まれる。この基本姿勢は治療椅子が、例えばオート1以外の姿勢であるときにオート1セットスイッチ71を押すと、常にオート1の姿勢に復原する。
この復原作用を説明する。オート1セットスイッチ71を押すとHレベルの信号がアドレスラッチ61及びAND回路65を介してセットラッチ26に出力され、アドレスラッチ61はメモリ40に対しオート1のポジション信号に対応するアドレス情報の読出しをコマンドし、この情報はマグニチュードコンパレータ50に出力され、A/Dコンバータ33からの現在位置データと比較されてその差を出力する。この出力はセットラッチ26の出力と共に駆動AND回路18、19、20、21に入り、駆動OR回路14、15、16、17及びリミットスイッチ90、91、92、93を介して上昇10、下降11、起立12、傾斜13の各駆動制御回路に出力され、姿勢制御が行われる。この動作はマグニチュードコンパレータ50に入力する治療椅子の現在位置情報と、読出し信号とが一致し、差の信号がなくなると停止する。またこの信号は駆動OR回路23及び駆動AND回路24を介してセットラッチ26のリセット端に入力され、ラッチが解除される。
以上、オート1、及びオート2の位置について述べたが、うがい位置及びリセット位置についても基本的な設定は同様な作用によって行われる。
【0012】
(3)前記オート1、オート2のいずれかの基本姿勢を選択した後、施術者がさらに患者に合わせた最適治療姿勢位置を調整設定する場合は、手動スイッチ77、78、79、80を操作し、駆動OR回路14、15、16、17を介し、上昇10、下降11、起立12、傾斜13の各駆動制御回路を作動させ微調整を行い修整する。この時の最終位置はOR回路22及びOR回路25を介し波形整形回路64にネガティブエッジの波形で入力される。波形整形回路64の出力はコマンドOR回路62、63を介し、書込み回路60及びアドレスラッチ64の入力となり前述したようにメモリ40にアドレスが記憶される。このタイミングは上記の微調整が終了した時点からメモリ40に記憶されるまでの上記経路の信号処理及び伝送時間であり1mS以内の短時間に実行される。
(4)上記(3)項の姿勢から次の姿勢のうがい位置又は、リセット位置にセットする時は、うがいセットスイッチ74、又はリセットスイッチ75を押すことにより上記(2)項で説明した設定位置に設定される。上記の74、75のスイッチは回路的に他の直前の姿勢を記憶させる等の他の機能を持たない。
(5)上記(4)の姿勢から(3)項の例えばオート1を微調整した姿勢に復帰させたい時はソフトスイッチ73を押すことにより行われる。前述したように基本姿勢オート1、オート2、次の作業姿勢うがい位置、リセット位置の各位置は当初設定された位置がメモリー40の所定領域にメモリーされているので、この他にメモリーされているのは(3)項で述べた基本姿勢をさらに微調整した位置である。従ってソフトメモリースイッチ73は単にその位置を再現させる作用を有する。ソフトメモリースイッチの位置は(3)項で述べた基本姿勢をさらに微調整した位置に対応しているので、ソフトメモリースイッチ73を押すとOR回路63を介しアドレスラッチ61によりメモリー40に書込まれている位置を指定し、前述(2)に準じた作用で前記(3)の位置にセットされる。
(6)うがいセット、またはリセット位置の作動中に緊急停止事項が発生した場合、緊急停止ボタン76を押すと一端がOR回路23の出力に接続されたAND回路24の他端に信号が入力され、さらにその出力はセットラッチ26のリセット端子に入りラッチが解除され動作が停止される。この時本発明の装置では前述したように既にセットポジションの記憶は終了しているので、停止後再開するときには直ちに元の位置に復帰することができる。
【0013】
【発明の効果】
以上説明したように、本発明の歯科用治療椅子の姿勢制御装置は、次のような効果を発揮する。
基本姿勢位置設定後、さらに微調整で最適治療姿勢位置を設定した後に、次の作業姿勢位置を設定し、その後その作業姿勢位置から前記最適治療姿勢位置に戻す工程を繰り返し行っても、最適治療姿勢位置にずれの倍加増大が生じることなく、最適治療姿勢位置を忠実に再現できる。従って特別なずれの修正回路等を設けることを必要とせず、簡明な手段で上記ずれ発生の問題を解消した。さらに、このことにより施術者は、ずれを消去するために最適治療姿勢位置を再設定する手間が不要となり、安定的に円滑な治療を進めることができる。
また、作業姿勢位置設定時に要緊急停止事態が発生した場合、一旦停止させた後、最適治療姿勢位置に復帰させる動作を行うことにより、前記最適治療姿勢位置に直ちに自動的に復帰させることができる。従って、従来一旦緊急停止が行われると、再開には最適治療姿勢位置を再度設定する手間を要したが、これを不要となした。
【図面の簡単な説明】
【図1】油圧シリンダ作動基本回路図
【図2】従来の姿勢制御駆動装置における動作のフローチャート
【図3】本発明の姿勢制御駆動装置における動作のフローチャート
【図4】従来のポジションスイッチ操作による動作のフローチャート
【図5】本発明のポジションスイッチ操作による動作のフローチャート
【図6】治療椅子姿勢制御装置のブロック図
【符号の説明】
1:オイルタンク 2:フイルタ
3:モーターポンプ 4:リリーフ弁
5:起立用2ポート電磁式切換弁 6:傾斜用2ポート電磁式切換弁
7:逆止め弁 8:流量調節弁
9:油圧シリンダ 10:上昇駆動制御回路
11:下降駆動制御回路 12:起立駆動制御回路
13:傾斜駆動制御回路 14:駆動OR回路
15:駆動OR回路 16:駆動OR回路
17:駆動OR回路 18:駆動AND回路
19:駆動AND回路 20:駆動AND回路
21:駆動AND回路 22:駆動OR回路
23:駆動OR回路 24:駆動AND回路
25:駆動OR回路 26:セットラッチ
30:ポテンショメータ 31:座席リフト位置検出
32:座席バック位置検出 33:A/Dコンバータ
40:メモリー 50:マグニチュードコンパレータ
61:アドレススイッチ 62:コマンドOR回路
63:コマンドOR回路 64:波形整形
65:コマンドOR回路 70:メモリースイッチ
71:オート1セットスイッチ 72:オート2セットスイッチ
73:ソフトメモリースイッチ 74:うがいリセットスイッチ
75:リセットスイッチ 76:緊急停止スイッチ
77:手動傾斜スイッチ 78:手動起立スイッチ
79:手動下降スイッチ 80:手動上昇スイッチ
90:リミットスイッチ 91:リミットスイッチ
92:リミットスイッチ 93:リミットスイッチ
Claims (2)
- 歯科治療椅子の座席シート及び背板を所定の位置に設定でき、かつ、緊急停止手段を備えた歯科用治療椅子において、基本姿勢位置設定後、
(1)さらに微調整で最適治療姿勢位置を設定する工程と、
(2)次の作業姿勢位置を設定する工程と、
(3)その後前記最適治療姿勢位置に戻す工程と、
上記(2)、(3)の工程を繰り返して採用する際に、
(3)の工程で前記最適治療姿勢位置を再現させる制御手段が、
(1)の工程で微調整した最適治療姿勢位置をリアルタイムに記憶させ、(2)の工程で作業位置を設定した後、(3)の工程で前記最適治療姿勢位置に戻し、再度作業姿勢位置の設定を行う際に、前記(1)の工程で記憶された最適治療姿勢位置をその都度更新して記憶させる機能を備えるものであり、
前記作業姿勢位置及び最適治療姿勢位置間で繰り返し作動を行っても、最適治療姿勢位置に前記繰り返し作動によるずれの倍加増大が生ずること無く、最適治療姿勢位置を忠実に再現することができ、また作業姿勢位置設定動作途中において要緊急停止事態が発生した際に、その動作を一旦停止させた後、最適治療姿勢位置に復旧させる動作を行うことにより、前記最適治療姿勢位置に自動的に復帰させることができるようにしたことを特徴とする歯科用治療椅子の姿勢制御装置。 - 作業姿勢位置が、うがい位置又はリセット位置であることを特徴とする請求項1に記載の歯科用治療椅子の姿勢制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23882395A JP3861302B2 (ja) | 1995-09-18 | 1995-09-18 | 歯科用治療椅子の姿勢制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23882395A JP3861302B2 (ja) | 1995-09-18 | 1995-09-18 | 歯科用治療椅子の姿勢制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH0975410A JPH0975410A (ja) | 1997-03-25 |
| JP3861302B2 true JP3861302B2 (ja) | 2006-12-20 |
Family
ID=17035812
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP23882395A Expired - Lifetime JP3861302B2 (ja) | 1995-09-18 | 1995-09-18 | 歯科用治療椅子の姿勢制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3861302B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102008382A (zh) * | 2010-12-31 | 2011-04-13 | 太仓市康辉科技发展有限公司 | 手术台控制装置 |
| CN118236237B (zh) * | 2024-05-24 | 2024-07-26 | 佛山市口腔医院(佛山市牙病防治指导中心) | 一种智能牙科椅控制系统、方法、电子设备及存储介质 |
-
1995
- 1995-09-18 JP JP23882395A patent/JP3861302B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH0975410A (ja) | 1997-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1436157B1 (en) | Method programming and operating a wheelchair having tilt and recline functions | |
| US4128797A (en) | Chair for dental treatment | |
| JPS5843830A (ja) | 自動車の座席調節装置用位置決め装置 | |
| JP3861302B2 (ja) | 歯科用治療椅子の姿勢制御装置 | |
| JP3861301B2 (ja) | 歯科用治療椅子の姿勢制御装置 | |
| DE69806975T2 (de) | Ein verfahren zur steuerung der geschwindigkeit eines arms einens plattenlaufwerks | |
| US4659145A (en) | Adjustable vehicle seat | |
| JP2737046B2 (ja) | ベッドにおける電動式床部起伏機構 | |
| JPS6365863A (ja) | 歯科用治療椅子の制御装置 | |
| JP2000166690A (ja) | ヘッドレスト調整装置 | |
| JPH09271494A (ja) | 産婦人科用検診台 | |
| JPH0441821A (ja) | ローダ制御装置 | |
| JPH0422101B2 (ja) | ||
| JPS637783B2 (ja) | ||
| JP2869542B2 (ja) | 車両用サーボパワウインドウ装置の制御方法 | |
| JPS63246162A (ja) | 医療用椅子の自動位置制御装置 | |
| JP3149001B2 (ja) | カメラ用シャッタの制御装置 | |
| JPH0414987B2 (ja) | ||
| JPH08189056A (ja) | 持上げ運搬作業機の操作装置 | |
| JPH09271493A (ja) | 産婦人科用検診台 | |
| JPS6149978B2 (ja) | ||
| JP2002177085A (ja) | シャンプー椅子の制御方法 | |
| JPH0311777B2 (ja) | ||
| JP3007777B2 (ja) | 電動シート制御装置 | |
| JPH01314640A (ja) | 車両用ミラーの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051011 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060411 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060918 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091006 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101006 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101006 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111006 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111006 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121006 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121006 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131006 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |