JP7701110B2 - ポンプ制御装置及びポンプ制御システム - Google Patents
ポンプ制御装置及びポンプ制御システム Download PDFInfo
- Publication number
- JP7701110B2 JP7701110B2 JP2022512001A JP2022512001A JP7701110B2 JP 7701110 B2 JP7701110 B2 JP 7701110B2 JP 2022512001 A JP2022512001 A JP 2022512001A JP 2022512001 A JP2022512001 A JP 2022512001A JP 7701110 B2 JP7701110 B2 JP 7701110B2
- Authority
- JP
- Japan
- Prior art keywords
- pump
- pressure
- tank
- drive frequency
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/04—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with electromagnetism
- B06B1/045—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with electromagnetism using vibrating magnet, armature or coil system
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B45/00—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids
- F04B45/04—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids having plate-like flexible members, e.g. diaphragms
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B45/00—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids
- F04B45/04—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids having plate-like flexible members, e.g. diaphragms
- F04B45/047—Pumps having electric drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0048—Detecting, measuring or recording by applying mechanical forces or stimuli
- A61B5/0051—Detecting, measuring or recording by applying mechanical forces or stimuli by applying vibrations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/021—Measuring pressure in heart or blood vessels
- A61B5/022—Measuring pressure in heart or blood vessels by applying pressure to close blood vessels, e.g. against the skin; Ophthalmodynamometers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Reciprocating Pumps (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Description
(1) コイルへの電流供給による電磁駆動により振動体を振動させる振動アクチュエータと、
前記振動体の振動により変位する可動壁を有し、前記可動壁の変位により、内部の容積が変更されて流体が前記内部に吸入されまたは前記内部から吐出される密閉室と、
前記密閉室から吐出される前記流体を溜めて前記流体の圧力を増加させるタンクと前記密閉室とを流体連通させる吐出部と、
を有するポンプを制御するためのポンプ制御装置であって、
前記タンク内の前記流体の圧力の値または前記圧力に対応する値を示す圧力値情報を取得する取得部と、
取得された前記圧力値情報に基づいて、前記コイルへ供給する電流の駆動周波数を制御する制御部と、を有し、
前記制御部は、前記タンク内の前記流体の前記圧力の前記値が切替圧力値になった際に、前記ポンプから前記タンクへの前記流体の流量を最大化する第1駆動周波数から前記タンク内の前記流体の圧力を最大化する第2駆動周波数に前記駆動周波数を切り替える、
ポンプ制御装置。
前記ポンプと、
前記タンク内の前記流体の圧力を測定して、前記圧力の前記値を示す前記圧力値情報を得る圧力検出部と、
を有し、
前記取得部は、前記圧力検出部から前記圧力値情報を取得する、ポンプ制御システム。
前記ポンプと、
前記タンク内の前記流体の圧力を増加させる際に、前記振動体の駆動時間を計測して、前記駆動時間を示す前記圧力値情報を得るタイマーと、
を有し、
前記取得部は、前記タイマーから前記圧力値情報を取得する、ポンプ制御システム。
前記制御部は、前記テーブルを用いて、前記駆動周波数を制御する、上記(5)に記載のポンプ制御システム。
<ポンプ制御システム100の全体構成>
図1は、本発明の実施の形態に係るポンプ制御システム100の概略構成を示すブロック図である。図1に示すように、本実施の形態に係るポンプ制御システム100は、ポンプ1と、タンク部120と、圧力測定部(圧力検出部)130と、マイコン部(制御部)140とを有する。
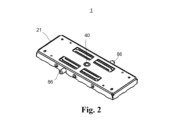
図2は、本発明の第1実施形態に係るポンプ制御システムのポンプのポンプ部の外観斜視図である。図3は、本発明の第1実施形態に係るポンプ制御システムのポンプの要部構成を示す平面図である。図4は、本発明の第1実施形態に係るポンプ制御システムのポンプの分解斜視図である。図5は、本発明の第1実施形態に係るポンプ制御システムのポンプにおけるコイルコア部の斜視図である。図6は、本発明の第1実施形態に係るポンプ制御システムのポンプにおける振動体の斜視図である。図7は、本発明の第1実施形態に係るポンプ制御システムのポンプの内部構成を示す平断面図である。図8は、本発明の第1実施形態に係るポンプ制御システムのポンプにおけるポンプ部の分解斜視図である。
振動アクチュエータ10は、固定体20と、軸部40と、軸部40を介して固定体20に対して往復回転自在に支持される振動体30と、を有する。振動アクチュエータ10は、固定体20及び振動体30の一方に、マグネット70(70a、70b)が設けられ、固定体20及び振動体30の他方に、マグネット70に対してコアの着磁面が対向するよう配置されたコイルコア部62(62a、62b)が設けられている。本実施形態では、振動体30にマグネット70(70a、70b)を設け、固定体20側にコイルコア部62(62a、62b)を設けている。換言すれば、本実施形態では、振動体30は、マグネット70(70a、70b)を含み、固定体20は、コイルコア部62(62a、62b)を含んでいる。振動アクチュエータ10は、コイル50a、50bへ電流供給することによって、振動体30を電磁駆動させ、振動体である振動体30を振動させる。
固定体20は、ケース21と、カバー22と、コイルコア部62a、62bと、を有する。また、固定体20には、ポンプ部80(80a、80b)が設けられている。
振動体30は、図3、図4、図6及び図7に示すように、固定体20のケース21内で軸部40(振動体30の回転軸)と直交する方向(ケース21の長手方向)に延在して配置されている。
マグネット70a、70bは、それぞれ対向配置されるコイルコア部62a、62bとともに、振動アクチュエータ10を駆動する磁気回路を構成する。
押圧部35は、振動体30が回転移動した際に、ポンプ部80の一対の密閉室82の可動壁822を押圧する。具体的には、押圧部35は、アーム部324a、324bが往復回転した際に、一対の密閉室82の可動壁822を押圧する一対の押圧子351を有する。
ポンプ部80(80a、80b)のそれぞれは、可動壁822、可動壁822により画成される密閉室82、吸入部83、バルブ84、吐出部86、吐出流路部88を有する。
可動壁822は、室形成部824と吐出流路部88を仕切る一壁部を構成し、変位可能に設けられている。可動壁822は、振動体30の振動により変位することにより、密閉室82室内の容積を変更する。可動壁822は、室形成部824とともに密閉室82を構成している。
密閉室82は、吸入部83及び吐出部86が接続され、且つ、可動壁822の変位により容積が変更する密閉された空間である。なお、吐出部86は、外部に連通する吐出口を有し、吐出口を介して、ポンプ1から空気を外部に吐出する。例えば、吐出口は、密閉室82の底面に接続された吐出部86に連通する開口である。可動壁822が変位すると、密閉室82内の容積が変更され、空気が密閉室82内に吸入、または、空気が密閉室82内から外部へ吐出される。吐出部86は、タンク部120と密閉室82とを流体連通させる。
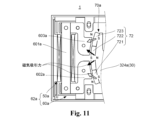
本実施形態では、図3及び図7に示すように、ケース21内において、振動体軸部40を挟んで対向する振動体30の両端部にそれぞれ配置されるマグネット70a、70bのそれぞれに、長手方向で離間して対向するように、磁性体であるコア部60a、60bが対向して配置されている。コア部60a、60bは、長手方向で離間して互いに対向するよう、ケース21の長手方向の両端壁部の内面上にそれぞれ配置されている。
その動作の一例を、図12を参照して説明する。図12は、本発明の第1実施形態に係るポンプ制御システム100のポンプの磁気回路構成を示す図である。なお、図12を参照したポンプ1の動作の一例の説明においても、図11を参照した説明と同様に、コイルコア部62a及びマグネット70aによって提供される磁気回路のみ説明し、コイルコア部62b及びマグネット70bによって提供される磁気回路についての説明は、省略する。
図1に戻り、タンク部120は、ポンプ部1から排出される流体の圧力を調整する。具体的には、タンク部120は、ポンプ1の密閉室82から吐出される空気を溜めて、タンク部120から吐出される空気の圧力を増加させる。タンク部120は、タンク吐出経路に接続され、閉塞室82内から吐出される空気を外部に出力せず、収容することにより、タンク部120内に空気を貯留し、タンク部120内の圧力を調整可能である。タンク部120は、ポンプ1の吐出口86に接続され、ポンプ1(ポンプ部80)の密閉室82と流体連通する。
圧力測定部130は、タンク部120内の空気(流体)の状態を計測する。具体的には、圧力測定部130は、タンク部120内の空気(流体)の圧力を測定して、圧力の値を示す圧力値情報を得て、該圧力情報をマイコン部140に出力する。圧力測定部130は、タンク部120内の空気(流体)の圧力を測定できれば、どのように構成されてもよい。圧力測定部130はタンク部120に設けられてよく、タンク部120内に設けられてもよい。
マイコン部140は、取得部146と、出力部144と、記憶部142とを有する。取得部146は、圧力情報測定部130から入力された圧力情報に基づいて、タンク部120内の空気の圧力の値を取得する。取得部146は、圧力測定部130に接続され、圧力測定部130から入力された圧力情報に基づいて、測定されたタンク部120内の空気の圧力値を取得する。出力部144は、コイル50a、50bに駆動周波数を出力する機能を有している。出力部144は、取得部146によって取得されたタンク部120内の空気の圧力値の情報に基づいた駆動周波数を、ポンプ1のコイル50a、50bへ出力する。
ポンプ1は、必要とされる搬送する流体(空気)の流量、搬送する流体への圧力の大きさ(空気圧力)を確保する必要がある。
図17は、本発明の第2実施形態に係るポンプの概略構成を示すブロック図である。図17に示すポンプ制御システム100Aは、ポンプ制御システム100と比較して、圧力検出部130(図1参照)に替えてタイマー160を用いる。
図18、図19はタンク容量が異なる場合のコイル50a、50bに供給する電流の駆動周波数制御のパターンを示す図である。図20は、第1実施形態のポンプを用いて、圧力値で駆動周波数を切り替える場合のテーブルを示す。図21A、図21Bは、第2実施形態のポンプを用いて、時間で駆動周波数を切り替える場合のテーブルを示す。なお、各図において、対応する圧力、流量が異なる初期駆動周波数として150Hz、250Hz、270Hzとしているが、これは一例であり、異なる複数の周波数であれば、高低は限定されない。
図22は、本第1実施形態、2による周波数制御により、タンク内の空気を緩やかに増加させたパターンを示す図であり、図23は、第1実施形態のポンプを用いて、圧力値により図22で示す駆動周波数を切り替えて、特性K4となるように制御する場合のテーブルを示す。また、図24は、第2実施形態のポンプを用いて、時間により図22で示す駆動周波数を切り替えて、特性K4となるように制御する場合のテーブルを示す。なお、各図において初期駆動周波数として300Hz、280Hz、270Hzとしているが、これは一例であり、異なる複数の周波数であれば、数値の高低は限定されない。
図25は、本発明の第3実施形態に係るポンプ制御システムを模式的に示す図である。図25に示すポンプ制御システムは、例えば、血圧装置10Dである。血圧装置10Dは、タンク部120に相当するカフ102と、カフに空気を送る管部5と、ポンプ駆動ユニット101と、圧力測定部13Dとを有する。
Claims (6)
- コイルへの電流供給による電磁駆動により振動体を振動させる振動アクチュエータと、
前記振動体の振動により変位する可動壁を有し、前記可動壁の変位により、内部の容積が変更されて流体が前記内部に吸入されまたは前記内部から吐出される密閉室と、
前記密閉室から吐出される前記流体を溜めて前記流体の圧力を増加させるタンクと前記密閉室とを流体連通させる吐出部と、
を有するポンプを制御するためのポンプ制御装置であって、
前記タンク内の前記流体の圧力の値または前記圧力に対応する値を示す圧力値情報を取得する取得部と、
取得された前記圧力値情報に基づいて、前記コイルへ供給する電流の駆動周波数を制御する制御部と、を有し、
前記制御部は、前記タンク内の前記流体の前記圧力の前記値が切替圧力値になった際に、前記ポンプから前記タンクへの前記流体の流量を最大化する第1駆動周波数から前記タンク内の前記流体の圧力を最大化する第2駆動周波数に前記駆動周波数を切り替える、
ポンプ制御装置。 - 前記制御部は、前記電流が、前記タンク内の前記流体の圧力に応じて異なる前記振動体の共振周波数で、前記コイルに供給されるように、前記駆動周波数を制御する、請求項1に記載のポンプ制御装置。
- 前記第2駆動周波数は、前記第1駆動周波数よりも高い周波数である、請求項1に記載のポンプ制御装置。
- 請求項1に記載のポンプ制御装置と、
前記ポンプと、
前記タンク内の前記流体の圧力を測定して、前記圧力の前記値を示す前記圧力値情報を得る圧力検出部と、
を有し、
前記取得部は、前記圧力検出部から前記圧力値情報を取得する、ポンプ制御システム。 - 請求項1に記載のポンプ制御装置と、
前記ポンプと、
前記タンク内の前記流体の圧力を増加させる際に、前記振動体の駆動時間を計測して、前記駆動時間を示す前記圧力値情報を得るタイマーと、
を有し、
前記取得部は、前記タイマーから前記圧力値情報を取得する、ポンプ制御システム。 - 前記ポンプ制御装置は、予め設定された前記振動体の駆動時間と前記駆動時間により増加する前記タンク内の前記流体の圧力との関係を示すテーブルを記憶する記憶部を有し、
前記制御部は、前記テーブルを用いて、前記駆動周波数を制御する、請求項5に記載のポンプ制御システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020064576 | 2020-03-31 | ||
| JP2020064576 | 2020-03-31 | ||
| PCT/JP2021/012111 WO2021200423A1 (ja) | 2020-03-31 | 2021-03-24 | ポンプ制御装置及びポンプ制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021200423A1 JPWO2021200423A1 (ja) | 2021-10-07 |
| JP7701110B2 true JP7701110B2 (ja) | 2025-07-01 |
Family
ID=77928301
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022512001A Active JP7701110B2 (ja) | 2020-03-31 | 2021-03-24 | ポンプ制御装置及びポンプ制御システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12486838B2 (ja) |
| EP (1) | EP4112193A4 (ja) |
| JP (1) | JP7701110B2 (ja) |
| CN (1) | CN115349058B (ja) |
| WO (1) | WO2021200423A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12486838B2 (en) * | 2020-03-31 | 2025-12-02 | Minebea Mitsumi Inc. | Pump control device and pump control system |
| JP7632970B2 (ja) * | 2021-03-30 | 2025-02-19 | ミネベアミツミ株式会社 | ポンプシステムおよび電子機器 |
| JP7501554B2 (ja) * | 2022-02-28 | 2024-06-18 | セイコーエプソン株式会社 | 振動発生装置、振動低減装置及び電子機器 |
| JP2025067705A (ja) * | 2023-10-13 | 2025-04-24 | ミネベアミツミ株式会社 | ポンプ |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013090825A (ja) | 2011-10-26 | 2013-05-16 | Omron Healthcare Co Ltd | 電子血圧計 |
| WO2013108459A1 (ja) | 2012-01-16 | 2013-07-25 | オムロンヘルスケア株式会社 | 血圧測定装置、および、血圧測定装置の制御方法 |
| JP2019075966A (ja) | 2017-10-13 | 2019-05-16 | 孝仁 今川 | 往復運動モーター |
| JP2020006344A (ja) | 2018-07-11 | 2020-01-16 | ミネベアミツミ株式会社 | 振動アクチュエーター及び電子機器 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0216379A (ja) * | 1988-06-30 | 1990-01-19 | Juki Corp | エアーポンプの駆動装置 |
| JPH0663879U (ja) * | 1993-02-22 | 1994-09-09 | 株式会社仲佐 | 振動式エアーポンプ |
| ES2304805T3 (es) * | 1998-01-13 | 2008-10-16 | Omron Healthcare Co., Ltd. | Esfigmomanometro de muñeca. |
| WO2001072435A1 (en) * | 2000-03-28 | 2001-10-04 | Iwaki Electronics Co., Ltd. | Vibration-generating device and portable telephone comprising the same |
| US6514047B2 (en) * | 2001-05-04 | 2003-02-04 | Macrosonix Corporation | Linear resonance pump and methods for compressing fluid |
| JP4378937B2 (ja) * | 2002-06-03 | 2009-12-09 | セイコーエプソン株式会社 | ポンプ |
| JP4396095B2 (ja) | 2002-06-03 | 2010-01-13 | セイコーエプソン株式会社 | ポンプ |
| US7001158B2 (en) * | 2003-01-24 | 2006-02-21 | Sturman Industries, Inc. | Digital fluid pump |
| US7354410B2 (en) * | 2004-02-23 | 2008-04-08 | Tyco Healthcare Group Lp | Compression treatment system |
| JP2006029284A (ja) * | 2004-07-21 | 2006-02-02 | Omron Healthcare Co Ltd | エアーポンプ、生体押圧用吸排気装置及び電子血圧計 |
| JP5259142B2 (ja) * | 2007-09-03 | 2013-08-07 | フジクリーン工業株式会社 | 電磁式ポンプ、水処理装置 |
| JP5303939B2 (ja) * | 2008-01-23 | 2013-10-02 | オムロンヘルスケア株式会社 | 血圧計の測定精度確認システム |
| JP5529676B2 (ja) | 2010-08-20 | 2014-06-25 | 三菱重工業株式会社 | ガスタービン燃焼器の燃料供給系統およびガスタービン燃焼器の燃料供給方法 |
| JP5796955B2 (ja) | 2010-12-24 | 2015-10-21 | キヤノン株式会社 | 振動型アクチュエータの制御装置 |
| JP2012217682A (ja) * | 2011-04-11 | 2012-11-12 | Omron Healthcare Co Ltd | 流量制御弁およびこれを備えた血圧情報測定装置 |
| JP5502017B2 (ja) * | 2011-04-15 | 2014-05-28 | 株式会社テクノ高槻 | 電磁振動型ダイヤフラムポンプ |
| JP6019592B2 (ja) * | 2012-01-23 | 2016-11-02 | オムロンヘルスケア株式会社 | 血圧測定装置 |
| JP2013220321A (ja) * | 2012-04-19 | 2013-10-28 | Omron Healthcare Co Ltd | 血圧測定装置、血圧測定装置における制御装置、および、血圧測定装置の制御方法 |
| US11466678B2 (en) * | 2013-11-07 | 2022-10-11 | Gas Technology Institute | Free piston linear motor compressor and associated systems of operation |
| CN108071581B (zh) * | 2017-12-13 | 2019-07-05 | 深圳市景新浩科技有限公司 | 一种微型压电泵充气软件控制方法及系统 |
| JP7019415B2 (ja) * | 2017-12-28 | 2022-02-15 | オムロンヘルスケア株式会社 | 血圧測定装置 |
| JP7188851B2 (ja) * | 2018-08-29 | 2022-12-13 | ミネベアミツミ株式会社 | 振動アクチュエータ、及びこれを備える携帯型電子機器 |
| US20200121258A1 (en) * | 2018-10-18 | 2020-04-23 | Alayatec, Inc. | Wearable device for non-invasive administration of continuous blood pressure monitoring without cuffing |
| JP7102335B2 (ja) * | 2018-12-27 | 2022-07-19 | オムロンヘルスケア株式会社 | 血圧測定装置 |
| US12486838B2 (en) * | 2020-03-31 | 2025-12-02 | Minebea Mitsumi Inc. | Pump control device and pump control system |
| JP7597438B2 (ja) * | 2020-12-25 | 2024-12-10 | ミネベアミツミ株式会社 | ポンプシステム、流体供給装置およびポンプシステムの駆動制御方法 |
-
2021
- 2021-03-24 US US17/907,528 patent/US12486838B2/en active Active
- 2021-03-24 JP JP2022512001A patent/JP7701110B2/ja active Active
- 2021-03-24 WO PCT/JP2021/012111 patent/WO2021200423A1/ja not_active Ceased
- 2021-03-24 EP EP21780666.0A patent/EP4112193A4/en active Pending
- 2021-03-24 CN CN202180025222.7A patent/CN115349058B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013090825A (ja) | 2011-10-26 | 2013-05-16 | Omron Healthcare Co Ltd | 電子血圧計 |
| WO2013108459A1 (ja) | 2012-01-16 | 2013-07-25 | オムロンヘルスケア株式会社 | 血圧測定装置、および、血圧測定装置の制御方法 |
| JP2019075966A (ja) | 2017-10-13 | 2019-05-16 | 孝仁 今川 | 往復運動モーター |
| JP2020006344A (ja) | 2018-07-11 | 2020-01-16 | ミネベアミツミ株式会社 | 振動アクチュエーター及び電子機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021200423A1 (ja) | 2021-10-07 |
| US20230147348A1 (en) | 2023-05-11 |
| CN115349058B (zh) | 2026-02-24 |
| US12486838B2 (en) | 2025-12-02 |
| EP4112193A1 (en) | 2023-01-04 |
| CN115349058A (zh) | 2022-11-15 |
| EP4112193A4 (en) | 2024-04-03 |
| WO2021200423A1 (ja) | 2021-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7701110B2 (ja) | ポンプ制御装置及びポンプ制御システム | |
| JP3746716B2 (ja) | 往復動式圧縮機のピストン支持構造 | |
| US6676388B2 (en) | Gas compression apparatus for reciprocating compressor | |
| US11754066B2 (en) | Pump system, fluid supply device and pressure detection method | |
| JP3816814B2 (ja) | 往復動式圧縮機のモータ構造 | |
| JP4188207B2 (ja) | ポンプ | |
| US11841012B2 (en) | Pump system, fluid supply device and method for controlling drive of pump system | |
| JP7701111B2 (ja) | ポンプ及び空気供給装置 | |
| JP2005273477A (ja) | 電磁式ダイヤフラムポンプ | |
| JPH08135577A (ja) | 電磁駆動式エアポンプ | |
| JPH09144662A (ja) | 流体ポンプ | |
| KR100442483B1 (ko) | 왕복동식 압축기의 피스톤 초기위치 조절장치 | |
| KR100428508B1 (ko) | 압축기 및 이의 제어방법 | |
| JPH0560075A (ja) | 芳香性電気製品 | |
| JPH11264378A (ja) | 電磁式ポンプ | |
| KR100320203B1 (ko) | 리니어 압축기의 무빙 매스 지지구조 | |
| JPH10252657A (ja) | 膜式電磁ポンプ | |
| KR100446768B1 (ko) | 왕복동식 압축기의 피스톤 충돌방지장치 | |
| JPH11324927A (ja) | 磁石式小型ポンプ装置およびこれを用いた血圧計 | |
| JPH11280654A (ja) | 振動型ダイヤフラムポンプ | |
| JP2004211693A (ja) | ポンプ | |
| JP2006037772A (ja) | 電磁往復動式ポンプ | |
| KR20010109671A (ko) | 리니어 압축기의 유동저항 저감구조 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20240313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250520 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250613 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7701110 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |